
Stable and Accurate Estimation of SOC Using eXogenous Kalman Filter for Lithium-Ion Batteries


Abstract
:1. Introduction
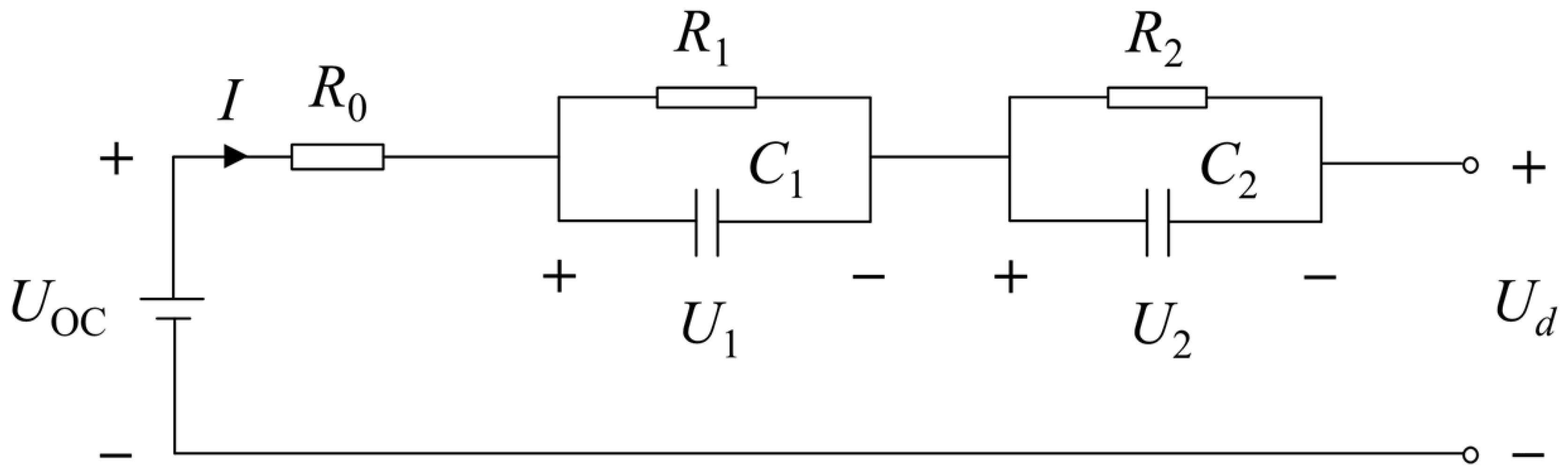
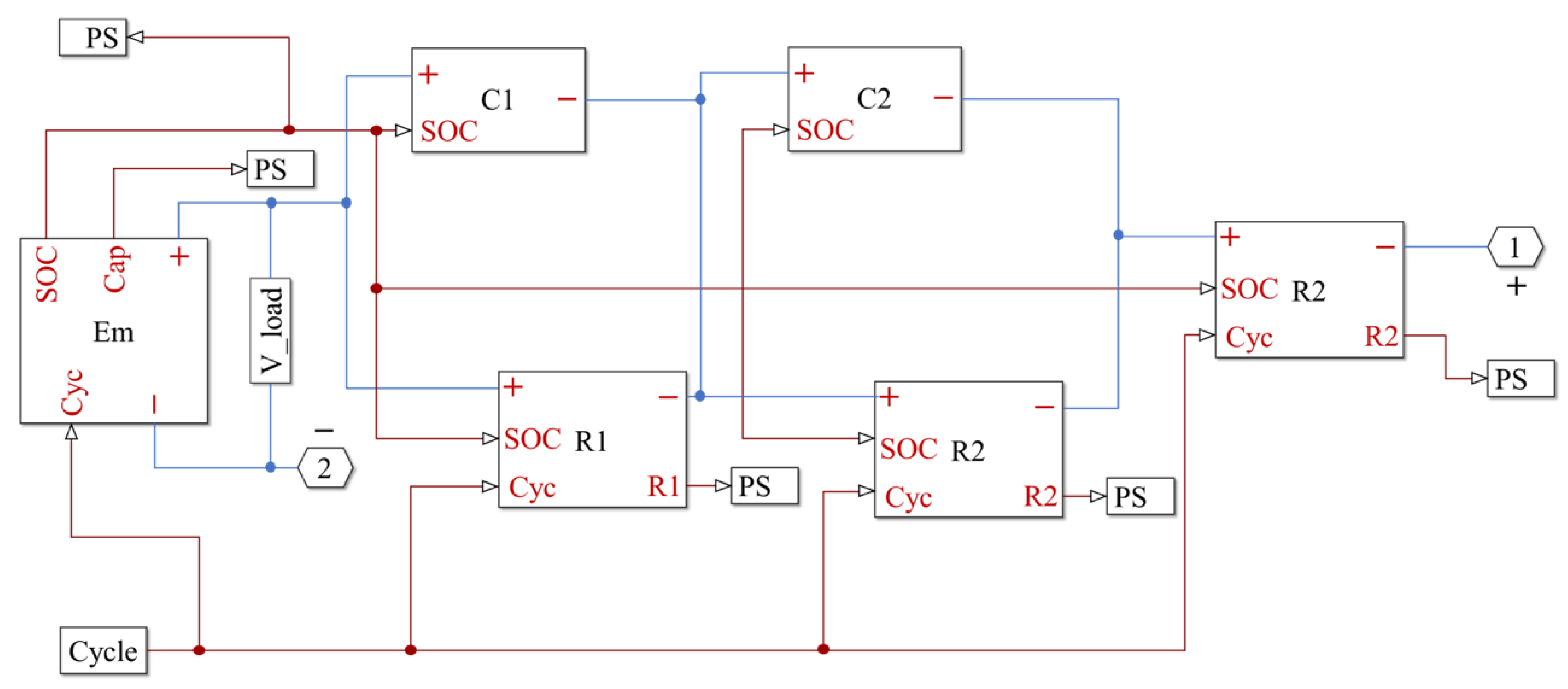
2. Equivalent Circuit Model for a Lithium-Ion Battery
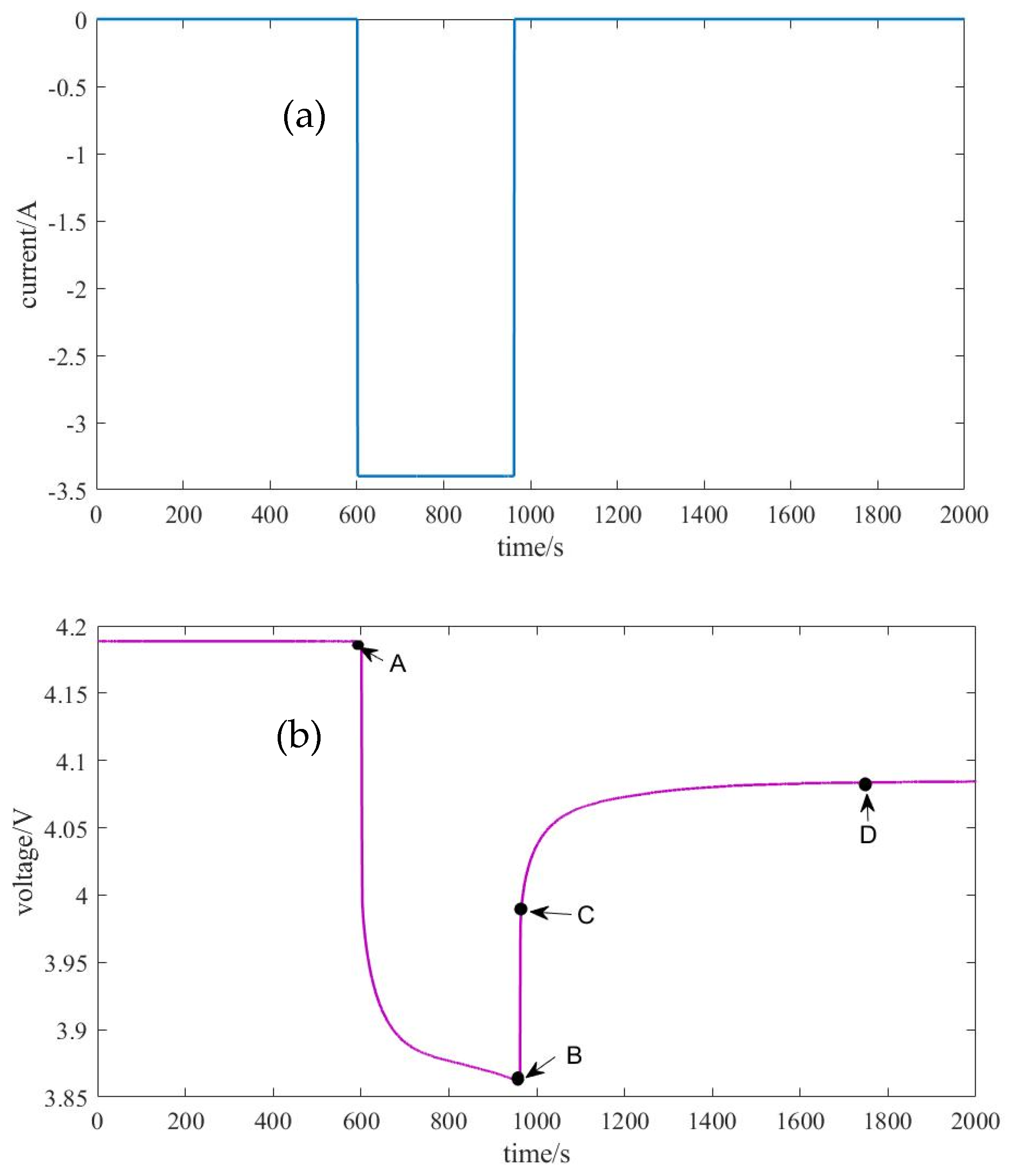
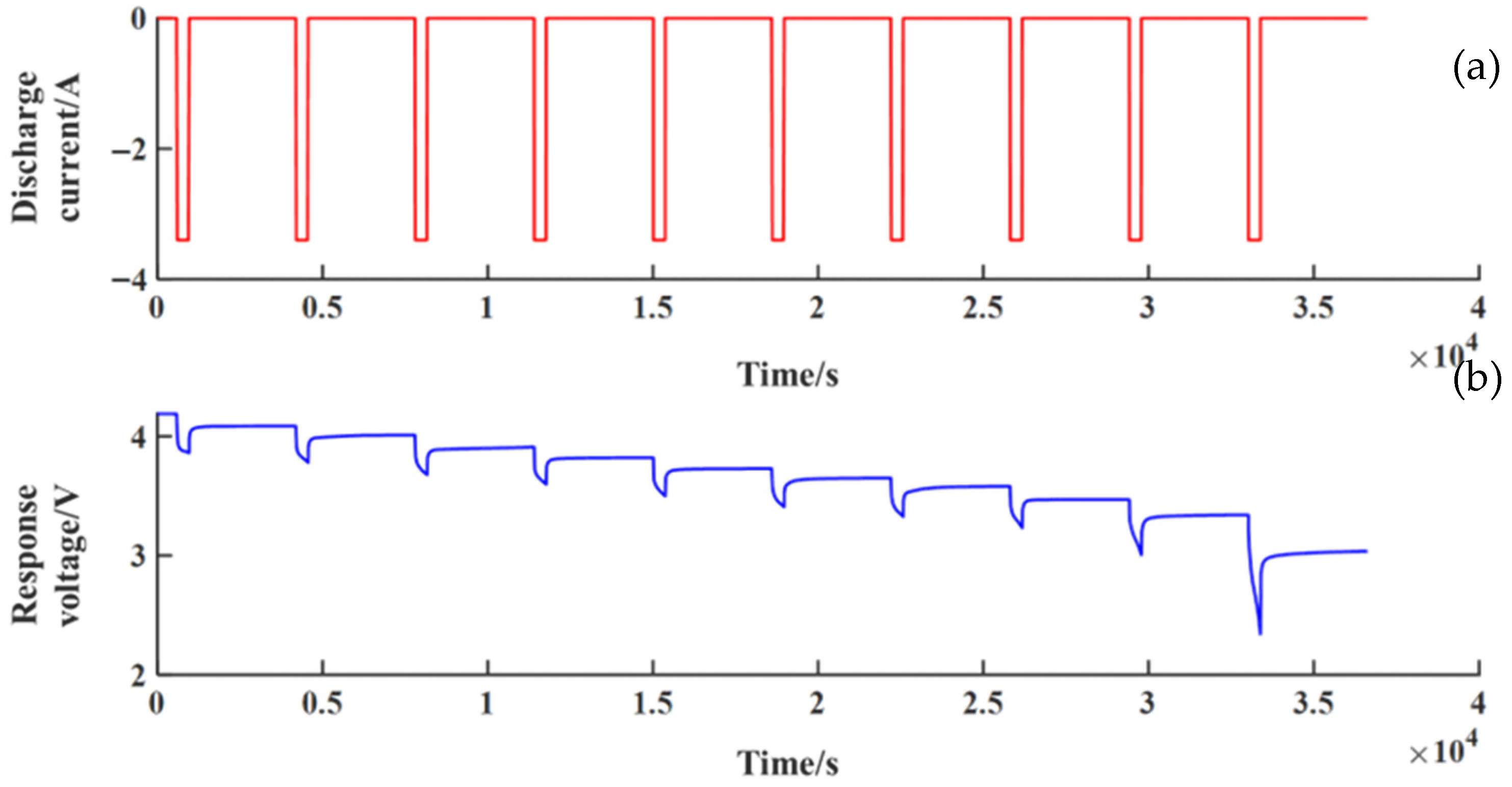
3. Approximate SOC Estimation Using the Equivalent Circuit Model of Lithium-Ion Battery by Experimental Tests
4. eXogenous Kalman Filter to Estimate SOC
4.1. Extended Kalman Filter to Estimate SOC
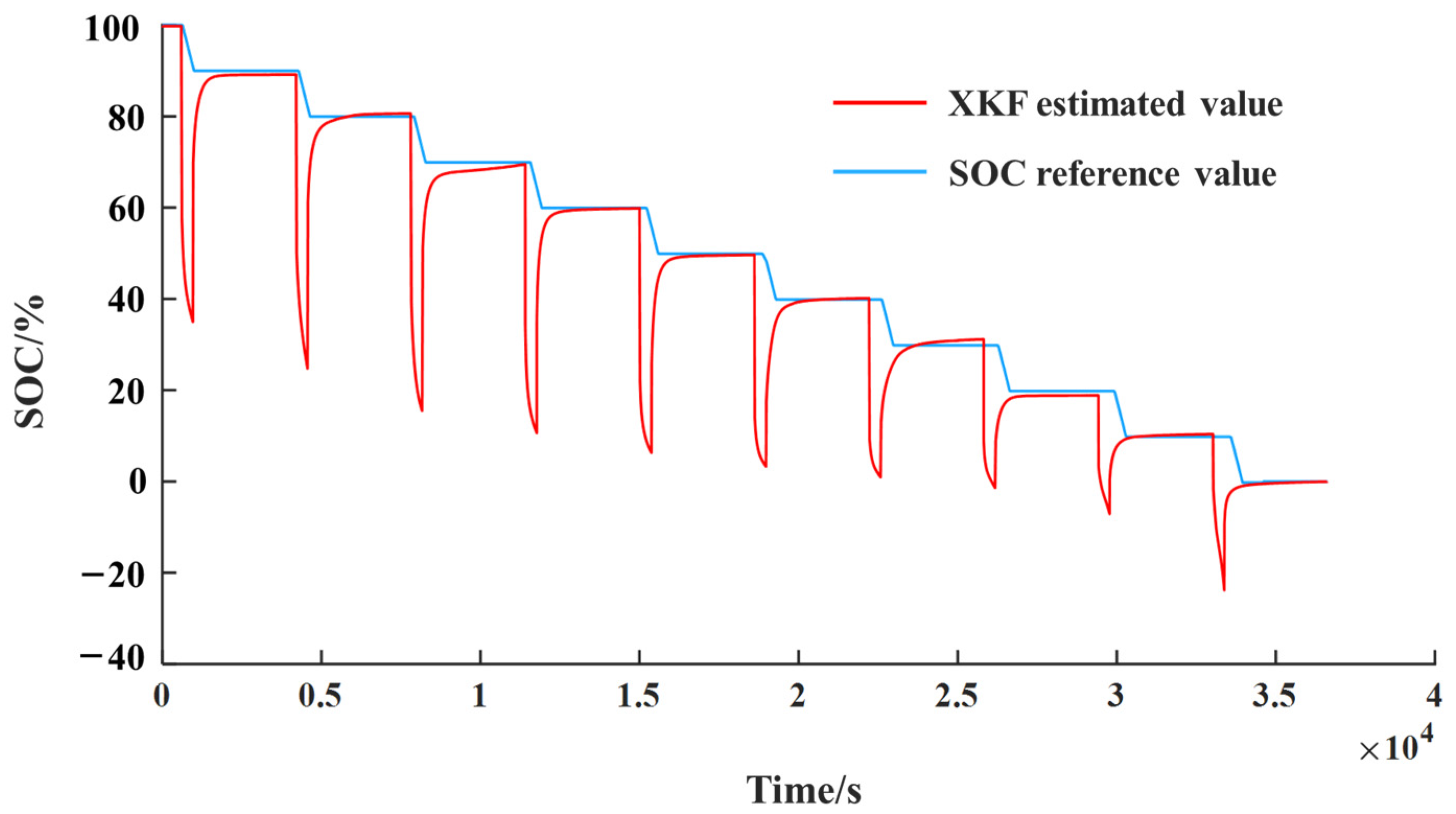
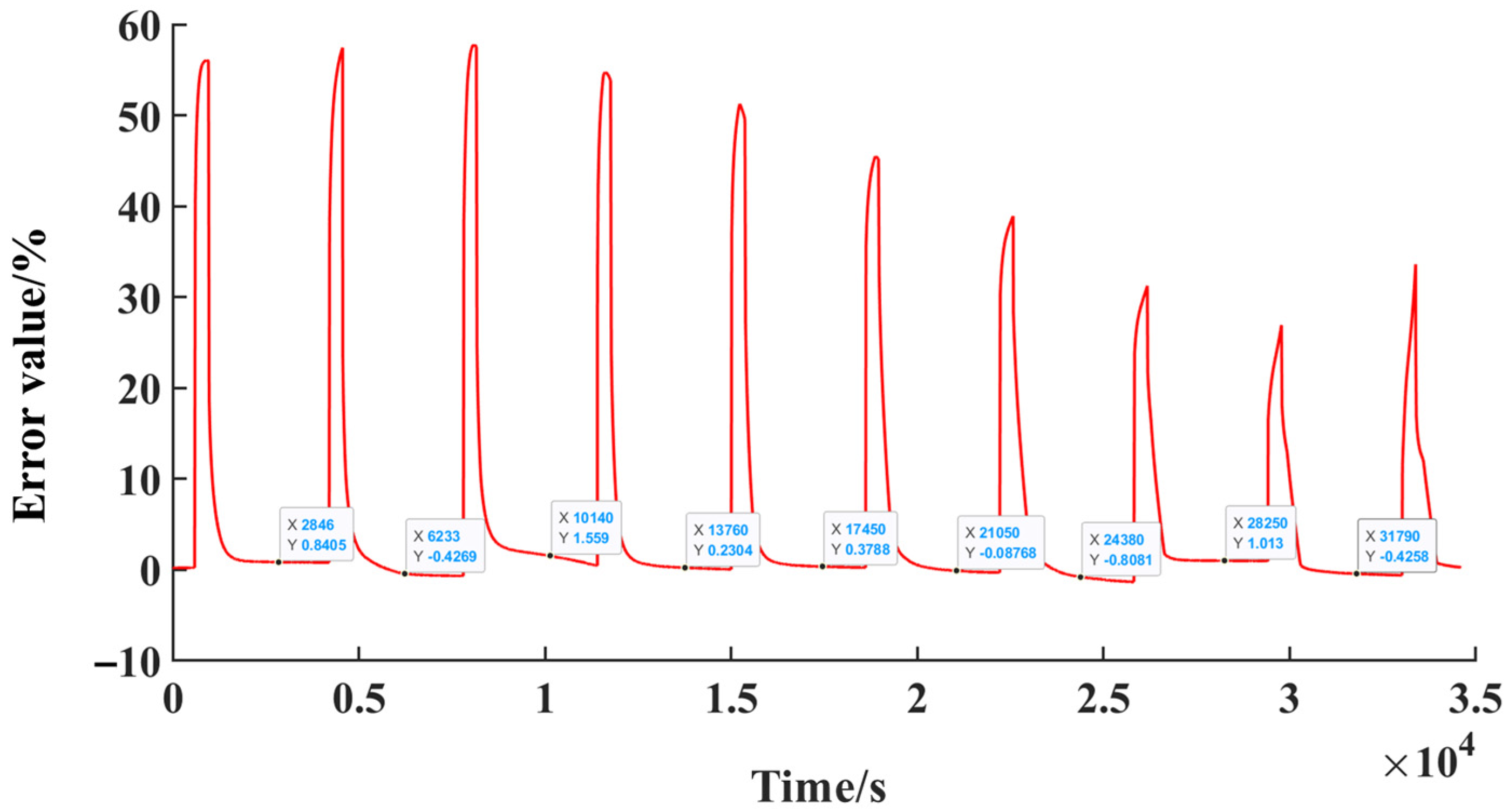
4.2. eXogenous Kalman Filter to Stablilty Estimate SOC
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Romero-Ternero, M.; Oviedo-Olmedo, D.; Carrasco, A.; Luque, J. A distributed approach for estimating battery state-of-charge in solar farms. Sensors 2019, 19, 4998. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, T.; Zhao, J.D.; Xiang, C.Q.; Cheng, S. Research on minimization of data set for state of charge prediction. Sensors 2022, 22, 1101. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Jiang, J.Y.; Gao, T.; Ren, S.R. State of charge estimation of li-ion battery based on adaptive sliding mode observer. Sensors 2022, 22, 7678. [Google Scholar] [CrossRef] [PubMed]
- Koshkouei, M.J.; Kampert, E.; Moore, A.D.; Higgins, M.D. Impact of lithium-ion battery state of charge on in situ QAM-based power line communication. Sensors 2022, 22, 6144. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.H.; Lee, I.S. Estimation of online state of charge and state of health based on neural network model banks using lithium batteries. Sensors 2022, 22, 5536. [Google Scholar] [CrossRef]
- Yang, F.F.; Li, W.H.; Li, C. State-of-charge estimation of lithium-ion batteries based on gated recurrent neural network. Energy 2019, 175, 66–75. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs—Part 3 State and parameter estimation. J. Power Sources 2019, 134, 277–292. [Google Scholar] [CrossRef]
- Wang, W.D.; Wang, X.T.; Xiang, C.L.; Wei, C.; Zhao, Y.L. Unscented kalman filter-based battery soc estimation and peak power prediction method for power distribution of hybrid electric vehicles. IEEE Access 2018, 6, 35957–35965. [Google Scholar] [CrossRef]
- Wang, G.; Xiang, J.W. Railway sleeper crack recognition based on edge detection and CNN. Smart Struct. Syst. 2021, 28, 779–789. [Google Scholar]
- Lou, Y.X.; Kumar, A.; Xiang, J.W. Machinery fault diagnosis based on domain adaptation to bridge the gap between simulation and measured signals. IEEE Trans. Instrum. Meas. 2022, 71, 3514709. [Google Scholar] [CrossRef]
- Gao, Y.; Liu, X.Y.; Xiang, J.W. Fault detection in gears by combination of numerical simulation and generative adversarial networks. IEEE/ASME Trans. Mechatron. 2022, 27, 3798–3805. [Google Scholar] [CrossRef]
- Li, C.R.; Xiao, F.; Fan, Y.X. An approach to state of charge estimation of lithium-ion batteries based on recurrent neural networks with gated recurrent unit. Energies 2019, 12, 1592. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X.H.; Huang, Y.; Zhang, Z.W.; Lin, H.P.; Zeng, Y.; Gao, M.Y. A hybrid method for state-of-charge estimation for lithium-ion batteries using a long short-term memory network combined with attention and a Kalman filter. Energies 2022, 15, 6745. [Google Scholar] [CrossRef]
- Qian, C.; Xu, B.H.; Xia, Q.; Ren, Y.; Yang, D.Z.; Wang, Z.L. A Dual-input neural network for online state-of-charge estimation of the lithium-ion battery throughout its lifetime. Materials 2022, 15, 5933. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.T.; Wang, S.L.; Fan, Y.C.; Xie, Y.X.; Fernandez, C. A novel adaptive back propagation neural network-unscented Kalman filtering algorithm for accurate lithium-ion battery state of charge estimation. Metals 2022, 12, 1369. [Google Scholar] [CrossRef]
- Wang, Y.C.; Shao, N.C.; Chen, G.W.; Hsu, W.S.; Wu, S.C. State-of-charge estimation for lithium-ion batteries using residual convolutional neural networks. Sensors 2022, 22, 6303. [Google Scholar] [CrossRef] [PubMed]
- Terala, P.K.; Ogundana, A.S.; Foo, S.Y.; Amarasinghe, M.Y.; Zang, H.Y. State of charge estimation of lithium-ion batteries using stacked encoder–decoder bi-directional LSTM for EV and HEV applications. Micromachines 2022, 13, 1397. [Google Scholar] [CrossRef]
- Speyer, J.L.; Chung, W.H. Stochastic Processes, Estimation, and Control; Advances in Design and Control Series No. 17; SIAM Press: Philadelphia, PA, USA, 2008. [Google Scholar]
- Ma, X.; Qiu, D.F.; Tao, Q.; Zhu, D.Y. State of charge estimation of a lithium-ion battery based on adaptive Kalman filter method for an equivalent circuit model. Appl. Sci. 2019, 9, 2765. [Google Scholar] [CrossRef] [Green Version]
- Yi, S.L.; Zorzi, M. Robust kalman filtering under model uncertainty: The case of degenerate densities. IEEE Trans. Autom. Control 2022, 67, 3458–3471. [Google Scholar] [CrossRef]
- Särkkä, S. Bayesian Filtering and Smoothing; Cambridge University Press: London, UK, 2013. [Google Scholar]
- Varouchakis, E.A. Modeling of temporal groundwater level variations based on a Kalman filter adaptation algorithm with exogenous inputs. J. Hydroinformatics 2017, 19, 191–206. [Google Scholar] [CrossRef]
- Liu, S.L.; Cui, N.X.; Zhang, C.H. An adaptive square root unscented kalman filter approach for state of charge estimation of lithium-ion batteries. Energies 2017, 10, 1345. [Google Scholar] [CrossRef]
- Li, M.; Zhang, Y.J.; Hu, Z.L.; Zhang, Y.; Zhang, J. A battery SOC estimation method based on AFFRLS-EKF. Sensors 2021, 21, 5698. [Google Scholar] [CrossRef] [PubMed]
- Johansen, T.A.; Fossen, T.I. The eXogeneous Kalman Filter (XKF). Int. J. Control. 2017, 90, 177–183. [Google Scholar] [CrossRef]
- Stovner, B.N.; Johansen, T.A.; Fossen, T.I.; Schjolberg, I. Attitude estimation by multiplicative exogenous Kalman filter. Automatica 2018, 95, 347–355. [Google Scholar] [CrossRef] [Green Version]
- Fossen, S.; Fossen, T.I. eXogenous Kalman filter (XKF) for visualization and motion prediction of ships using live automatic identification system (AIS) data. Model. Identif. Control. 2019, 39, 233–244. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.Q.; Sun, R.; Liu, M.; Song, D.Z. Two-stage exogenous Kalman filter for time-varying fault estimation of satellite attitude control system. J. Frankl. Inst. 2020, 357, 2354–2370. [Google Scholar] [CrossRef]
- Ma, L.L.; Wang, F.X.; Shen, W.; Wang, J.Z. Fault-tolerant control based on modified eXogenous Kalman filter for PMSM. J. Electr. Eng. Technol. 2022; early access. [Google Scholar] [CrossRef]
- Seaman, A.; Dao, T.S.; McPhee, J. A survey of mathematics-based equivalent-circuit and electrochemical battery models for hybrid and electric vehicle simulation. J. Power Sources 2014, 256, 410–423. [Google Scholar] [CrossRef] [Green Version]
- Ji, Y.J.; Qiu, S.L.; Li, G. Simulation of second-order RC equivalent circuit model of lithium battery based on variable resistance and capacitance. J. Cent. South Univ. 2020, 27, 2606–2613. [Google Scholar] [CrossRef]
- Xia, B.Z.; Wang, H.Q.; Tian, Y.; Wang, M.W.; Sun, W.; Xu, Z.H. State of charge estimation of lithium-ion batteries using an adaptive cubature Kalman filter. Energies 2015, 8, 5916–59365. [Google Scholar] [CrossRef] [Green Version]
- Xia, B.Z.; Zheng, W.H.; Zhang, R.F.; Lao, Z.Z.; Sun, Z. A novel observer for lithium-ion battery state of charge estimation in electric vehicles based on a second-order equivalent circuit model. Energies 2017, 10, 1150. [Google Scholar] [CrossRef]
- Xia, B.Z.; Guo, S.K.; Wang, W.; Lai, Y.Z.; Wang, H.W.; Wang, M.W.; Zheng, W.W. A state of charge estimation method based on adaptive extended Kalman-particle filtering for lithium-ion batteries. Energies 2018, 11, 2755. [Google Scholar] [CrossRef] [Green Version]
- Guo, X.W.; Kang, L.Y.; Yao, Y.; Huang, Z.Z.; Li, W.B. Joint estimation of the electric vehicle power battery state of charge based on the least squares method and the Kalman filter algorithm. Energies 2016, 9, 100. [Google Scholar] [CrossRef] [Green Version]
- Falai, A.; Giuliacci, T.A.; Misul, D.; Paolieri, G.; Anselma, P.G. Modeling and on-road testing of an electric two-wheeler towards range prediction and BMS integration. Energies 2022, 15, 2431. [Google Scholar] [CrossRef]
- Ping, S.; Ouyang, M.; Lu, L.; Li, J.; Feng, X. The co-estimation of state of charge, state of health, and state of function for lithium-ion batteries in electric vehicles. IEEE Trans. Veh. Technol. 2017, 67, 92–103. [Google Scholar]
- Fairweather, A.J.; Foster, M.P.; Stone, D.A. Modelling of VRLA batteries over operational temperature range using pseudo random binary sequences. J. Power Sources 2012, 207, 56–59. [Google Scholar] [CrossRef]
- Plett, G.L. High-performance battery-pack power estimation using a dynamic cell model. IEEE Trans. Veh. Technol. 2004, 53, 1586–1593. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SOC/% | 10 | 20 | 30 | 40 | 50 | 60 | 70 | 80 | 100 |
| Ud/V | 3.3572 | 3.3510 | 3.5810 | 3.6492 | 3.7267 | 3.8182 | 3.9127 | 4.0082 | 4.1899 |
| /Ω | /Ω | /Ω | /F | |
| 0.04474 | 0.016603 | 0.0058259 | 10,358 | 18,862 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, Q.; Li, X.; Tu, B.; Cao, J.; Zhang, M.; Xiang, J. Stable and Accurate Estimation of SOC Using eXogenous Kalman Filter for Lithium-Ion Batteries. Sensors 2023, 23, 467. https://doi.org/10.3390/s23010467
Lin Q, Li X, Tu B, Cao J, Zhang M, Xiang J. Stable and Accurate Estimation of SOC Using eXogenous Kalman Filter for Lithium-Ion Batteries. Sensors. 2023; 23(1):467. https://doi.org/10.3390/s23010467
Chicago/Turabian StyleLin, Qizhe, Xiaoqi Li, Bicheng Tu, Junwei Cao, Ming Zhang, and Jiawei Xiang. 2023. "Stable and Accurate Estimation of SOC Using eXogenous Kalman Filter for Lithium-Ion Batteries" Sensors 23, no. 1: 467. https://doi.org/10.3390/s23010467