
Butterfly: μW Level ULP Sensor Nodes with High Task Throughput

 , ,
, ,
Abstract
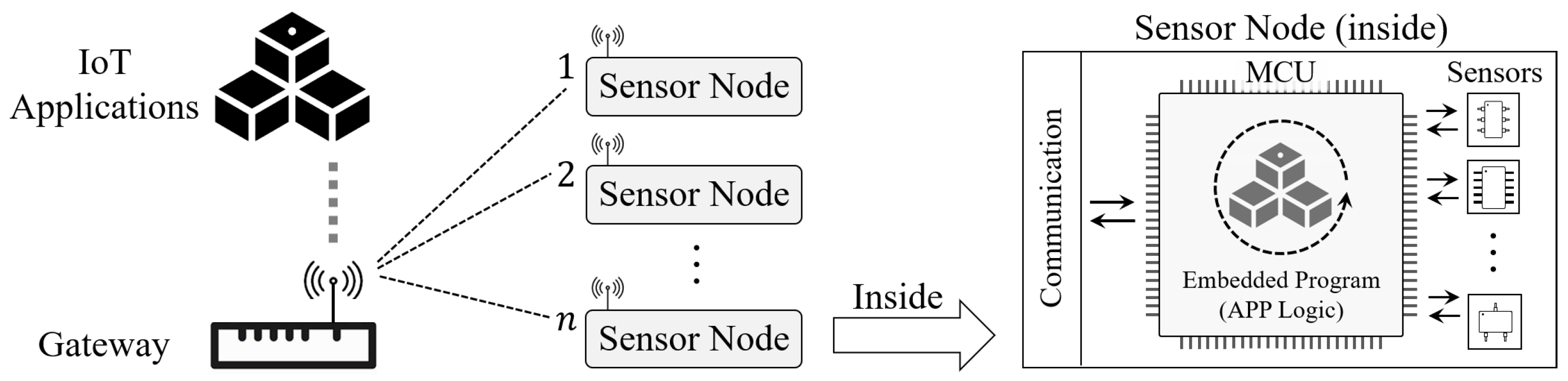
:1. Introduction
- We propose a new methodology for the design of lightweight IoT sensor nodes, which has W level power consumption, rapid task performance and anonymity security.
- We design an efficient bus signal transmission mechanism for sensor control on MCU-free LSNs, which achieves four times the efficiency higher than the previous work.
- We design a data-efficient sensor control mechanism, which removes data redundancy in both downlink and uplink aspects, and thus further accelerates the task rate.
- We design a task prediction mechanism to manage sensing tasks on multiple LSNs, which can significantly improve the execution efficiency of concurrent tasks.
2. Related Works
- (1)
- Work mode optimized on MCU. This branch focuses on optimizing the power consumption of the node by adjusting the operating mode of its MCU, such as WISP [10], MOO [2], LILAC [3] and many other battery-less nodes [11,12,13] which can even work with ambient power [14,15,16,17,18]. For these works, the indispensable design lies in the operating state control of MCU, where methods of duty-cycle [19] and DVFS [20] are useful to reduce its average power consumption by switching the MCU’s operating state or clock frequency. However, since the total workloads for the same tasks remain unchanged, such approaches hardly cut down the total power consumption in the task execution but may even bring additional energy overhead due to frequently switching the working states of MCU. Finally, the above approaches principally reduce the average running speed of MCU, which eventually obstructs the node to achieve a good task efficiency.
- (2)
- Computing offloading. This direction focuses on computing offloading that utilizes gateways to share part of the computing tasks with the node and optimize its power consumption. There are representative works like literature [21,22,23,24,25], where many useful methods are proposed to share tasks with sensor nodes and the edge gateway for lower power overhead. However, as the decision of offloaded tasks requires additional program functionality in the MCU, it brings extra computing and communication loads and thus becomes the bottleneck of further reducing the power consumption.
3. Butterfly in a Nutshell
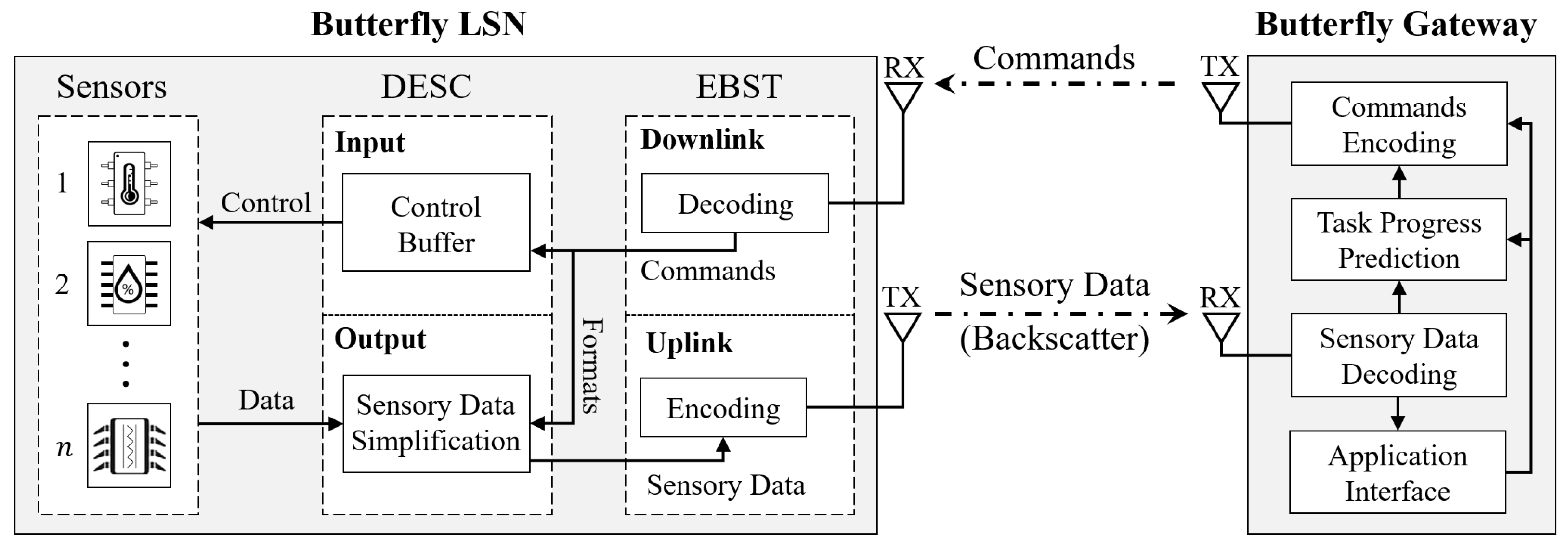
3.1. Butterfly LSN
- (1)
- Efficient Bus Signal Transmission (EBST): For a Butterfly LSN to execute tasks rapidly, the EBST unit plays an essential role, handling efficient signal converting in both downlink and uplink aspects. Specifically, on the downlink side, the EBST decodes the received wireless signals in an efficient way and converts it into standard computer bus signals, which the LSN and deployed sensors can recognize. In addition, in the uplink aspects, the sensory data are conveyed to the gateway via backscatter with ultra-low-power consumption. With efficient signal converting, the EBST unit gives an essential foundation for the LSN to control sensors and execute sensing tasks rapidly. Compared with the previous work [9], our EBST theoretically improves 400% efficiency in downlink bus signal transmission (as described in Section 4.1).
- (2)
- Data-Efficient Sensor Control (DESC): The DESC unit is the key element that further accelerates the task rate of sensor reading for LSNs. By buffering the frequently used commands in input aspects and simplifying the sensory data by its formats in output aspects, a DESC can minimize the amounts of transmitted data between the gateway and LSNs in both downlink and uplink aspects. By this, even a small amount of data transmission can support the execution of a large number of tasks, thereby further improving task performance and efficiency. The detailed design is presented in Section 5.
- (3)
- Onboard sensors: The Commercial Off-The-Shelf (COTS) sensor can be directly purchased online or offline. We connect the sensor to our LSN for feasibility verification and performance evaluation.
3.2. Butterfly Gateway
- (1)
- Commands Encoding unit: This unit encodes downlink commands for the LSN control. According to the application requirements and current task status, this unit issues corresponding commands to control the target LSN to perform operations such as buffer writing, sensor reading, etc.
- (2)
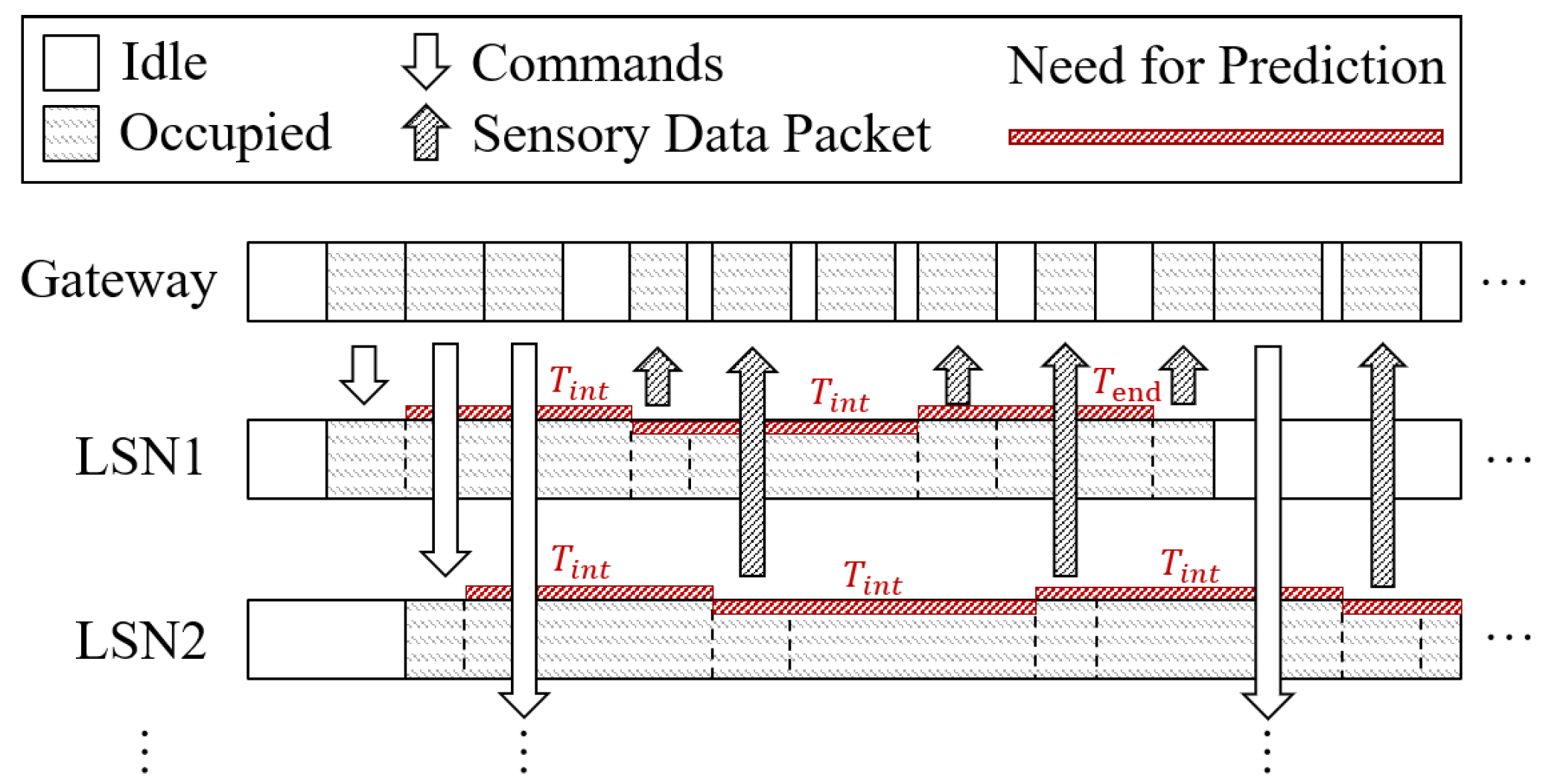
- Task Progress Prediction (TPP): The TPP unit is a key component that is designed to predict the task execution states of each LSN to better utilize resources in a gateway network and further improve the task efficiency. Specifically, based on the running speed of each LSN, this unit can calculate the possible timing for future bandwidth occupation, which also indicates the available part that the gateway can issue commands to execute other tasks simultaneously. Such a design can effectively reduce the task delay and cut down the waiting time for sensory data receiving, thereby effectively improving the execution efficiency of concurrent tasks. In addition, it can efficiently avoid possible data collisions caused by multi-LSNs uploading the data simultaneously. The detailed designs are discussed in Section 6.
- (3)
- Sensory data decoding: This unit is designed to decode the uploaded sensory data and provide it for corresponding IoT applications through the application interface. At the same time, the decode results are also provided to the task prediction unit to obtain current task progress of the target LSN.
- (4)
- Application interface: The interface for IoT users to enter the requirements for specific IoT applications, e.g., reading an accelerometer at 1.2 kHz for 10 s on a specific LSN. Based on the recorded requirements, the gateway controls the target LSN to execute corresponding sensing tasks accordingly.
4. Efficient Bus Signal Transmission (EBST)
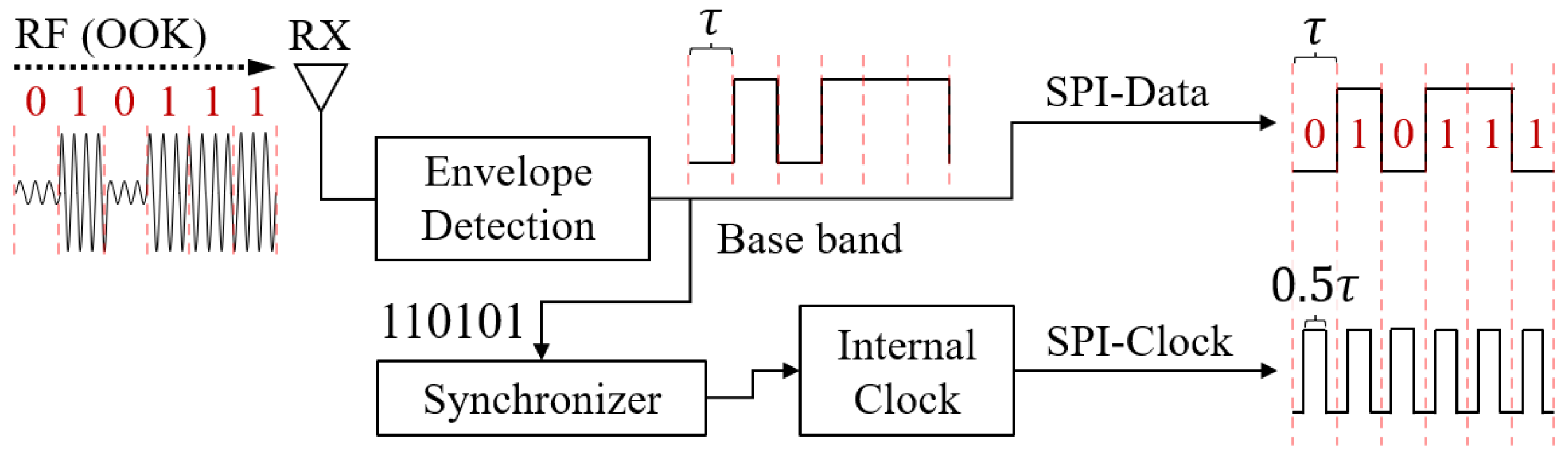
4.1. Downlink Signal Transmission
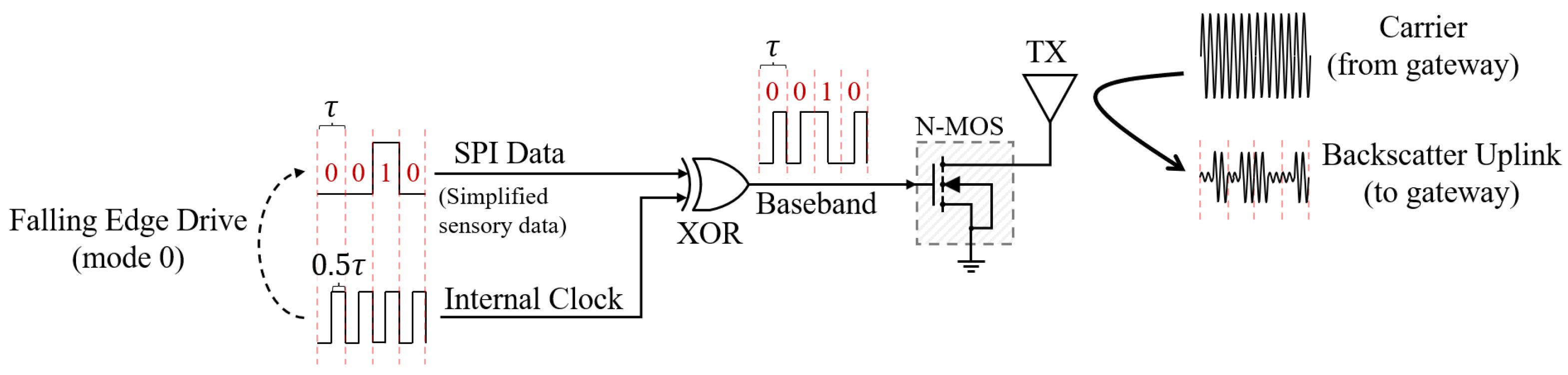
4.2. Uplink Signal Transmission
5. Data-Efficient Sensor Control (DESC)
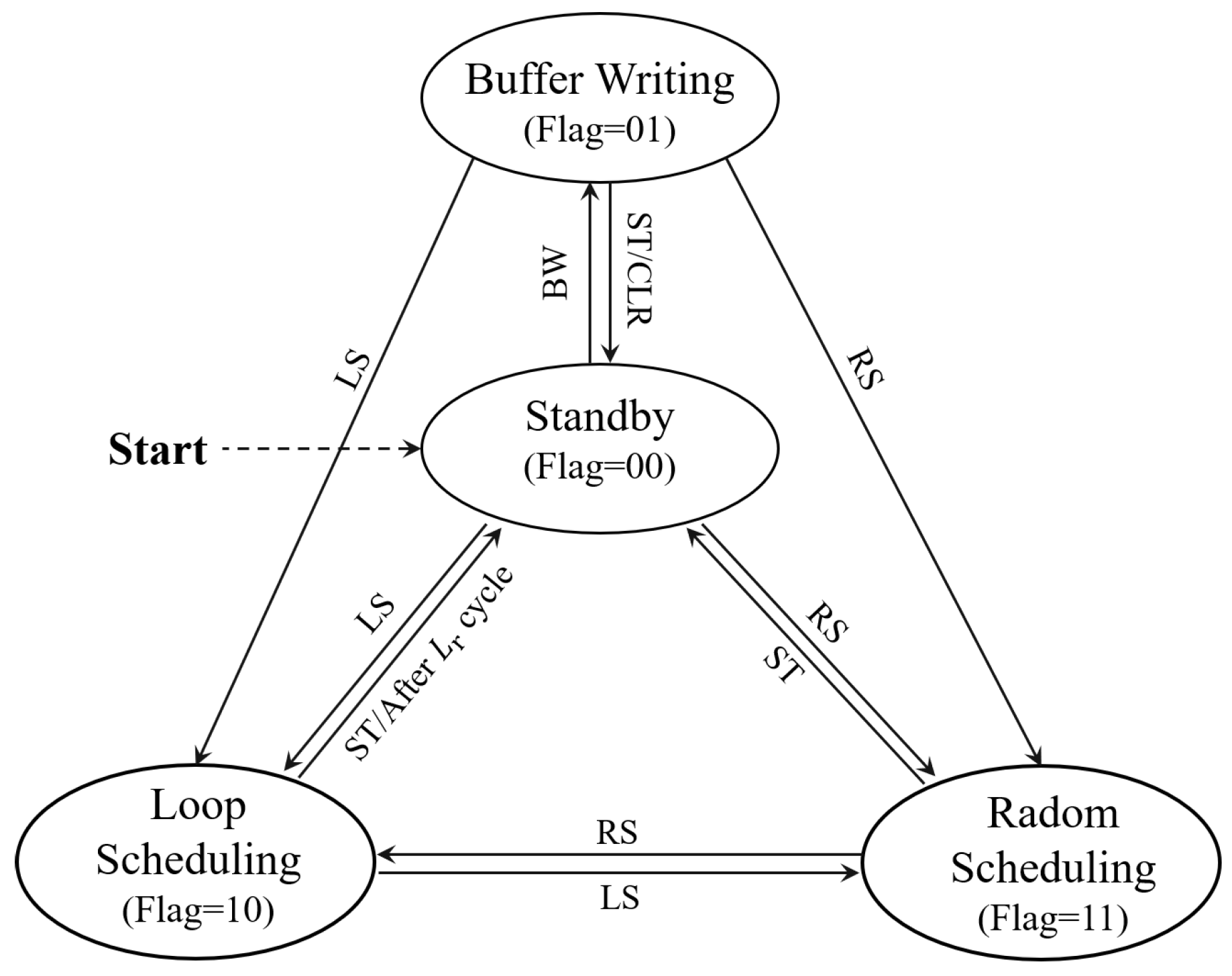
5.1. Control Input Buffering
- Standby (flag = 00). When the LSN is powered on, it initially goes to the stand by state for commands receiving and will jump to another three states if the corresponding command is received. In addition, the gateway can also control an LSN from other states to jump to the standby state by issuing the standby (ST) command.
- Buffer Writing (flag = 01). The buffer writing state is a necessary state before a LSN performs sensor control, which is designed to buffer the frequent used information and thus save bandwidth in future operations. Specifically, in this state, the gateway can write the control sequence of a sensor into the buffer of the target LSN, with which all required underlying signal (including the required input signal in SPI interface) can be generated for sensor control. In addition, the configuration of sensory data de-redundancy in the uplink channel is also written by the gateway in this state. By issuing a buffer writing (BW) command, a gateway can transfer the target LSN into the buffer writing state; after that, the corresponding sensor can be operated with minimized communication overhead.
- Loop Scheduling (flag = 10). In this state, the LSN cyclically reads with one or more sensors selected, minimizing communication overhead. A Loop Scheduling (LS) command with loop configurations can transfer an LSN into this state, where the target sensors are sampled under the loop configuration—for instance, if the configuration represents reading three selected sensors for 500 cycles at 25 Hz. When received, the LSN can automatically read corresponding sensors for 500 times at the defined speed and upload the results after de-redundancy (as described in Section 5.2). For the gateway, it receives the uploaded sensory data and calculates the time mark of each sample based on the preset sample rate to recover the complete information of all sensory data. In this way, a large amount of complete sensor data can be obtained with minimized communication overhead. In addition, if the application needs, the gateway can issue an ST command or random scheduling (RS) command to interrupt the sensor reading and turn the LSN state into standby or random scheduling, respectively.
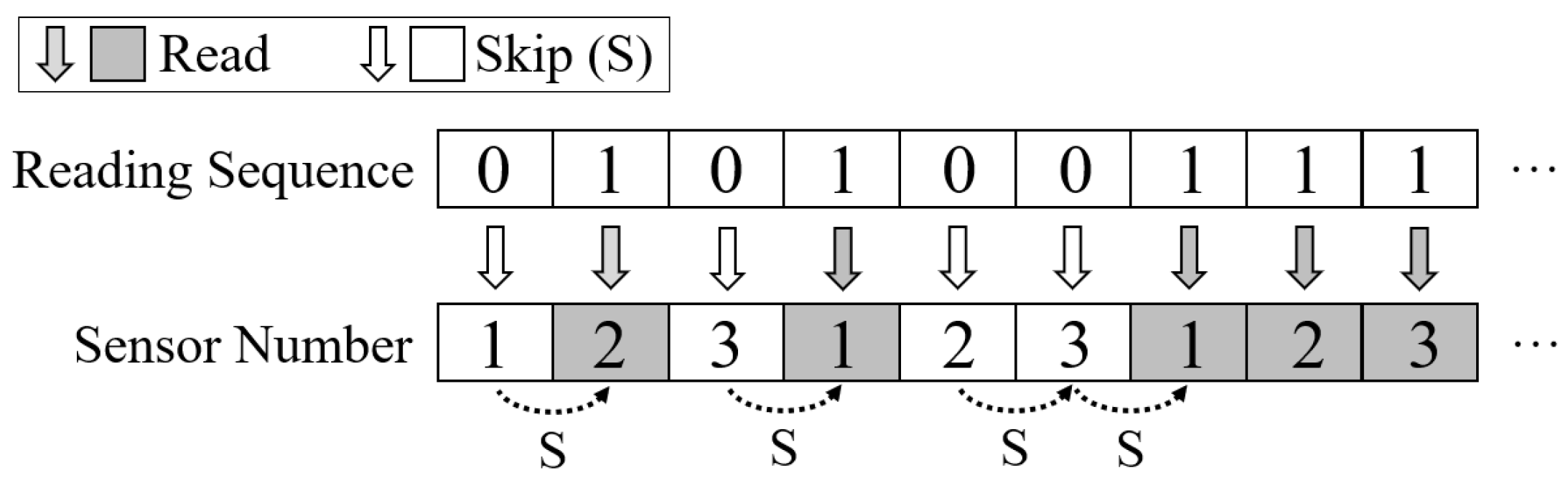
- Random Scheduling (flag = 11). In this state, the gateway can control sensors on the target LSN in a random sequence with minimized overhead. Specifically, in this state, each bit of the gateway command will correspond to the scheduling decision of a sensor, where 1 means read the current sensor and 0 means skip for the next sensor. For a better understanding, we make an example in Figure 6. For instance, if the gateway sends 010100111 to an LSN with three sensors selected to operate, it means read the 2-nd sensor in the first loop, read the 1-st sensor in the second loop, and read all sensors in the third loop. By this, each sensor can be decided to read or skip with only 1-bit of command transmission, ensuring a random order of sensor reading for the requirements of various IoT applications while minimizing communication overhead.
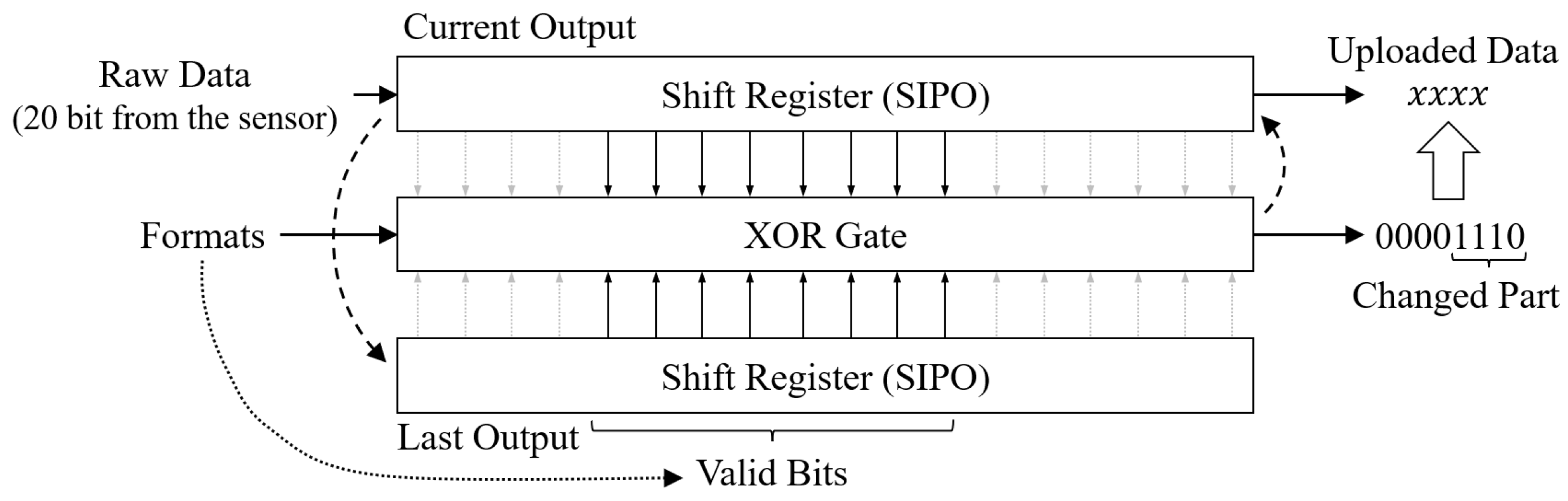
5.2. Sensor Output Simplification
5.2.1. Sensory Data De-Redundancy
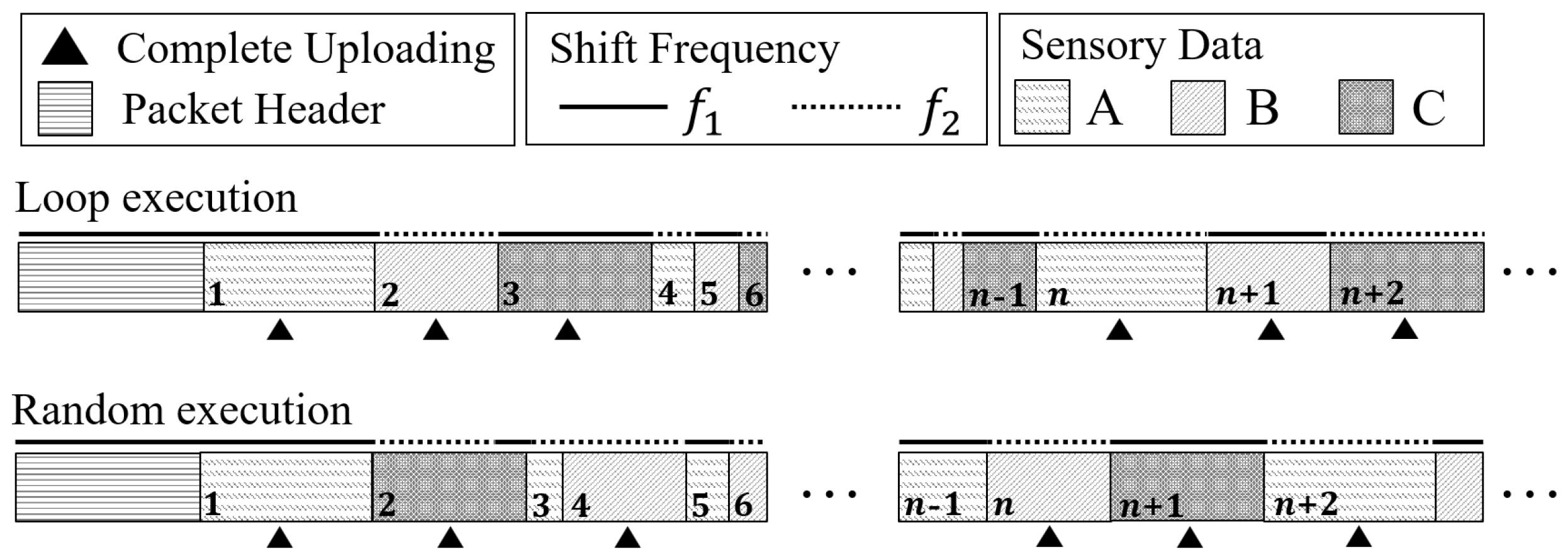
5.2.2. Sensory Data Packaging
6. Butterfly Networks
6.1. Task Prediction in Loop Scheduling
6.2. Task Prediction in Random Scheduling
7. Implementation
7.1. Implementation Details
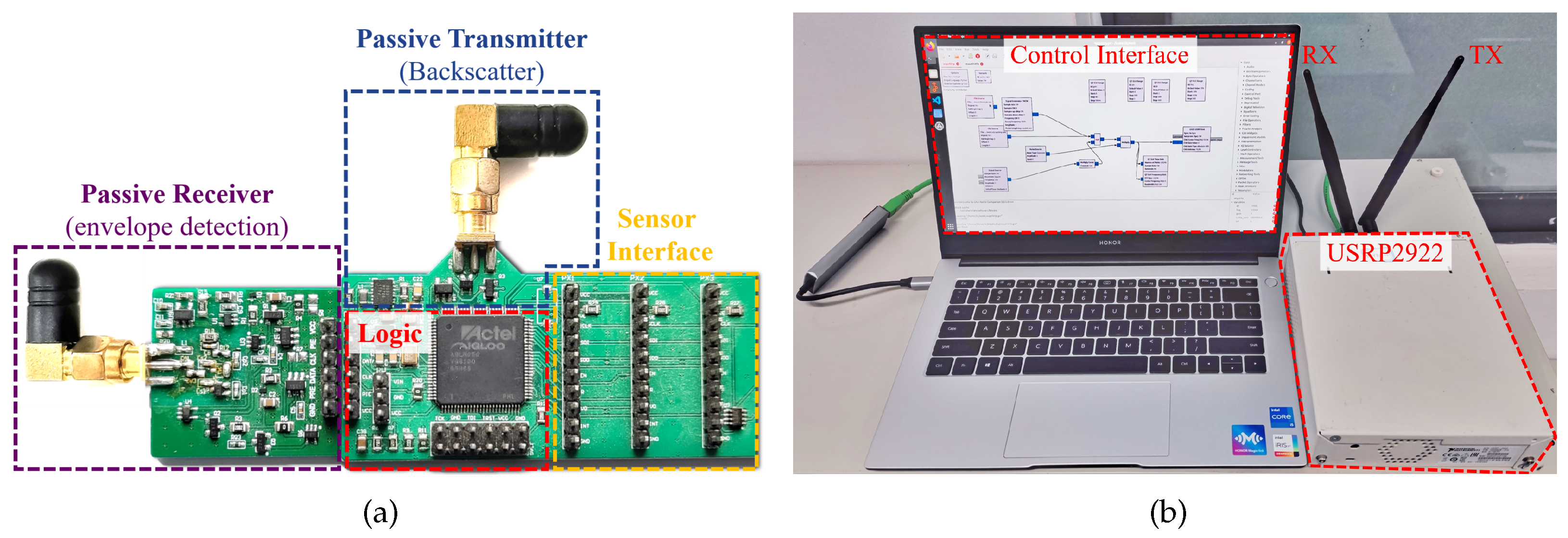
- Butterfly LSN. As illustrated in Figure 10a, the logic part of the LSN prototype is implemented using an IGLOO nano FPGA (AGLN060V2), where 6.2 k of logic gates (10.3% of FPGA chip resources) are used for the logic control, and 1 kb of the memory are used for the buffer. We also deploy an ultra-low-power SIT1581 [36] oscillator to run the FPGA, which only consumes 51 W (30 A, 1.7 V) power at 2.5 MHz. The receiver works with an RF signal at 915 mHz with Non-Return to Zero (NZR) encoding and On-Off-Keying (OOK) modulation. We implemented the receiver by duplicating the RF envelope detection circuit in [9] but simplified the form of the transmitted signal, thus we can achieve a longer communication range. The passive transmitter generates uplink backscatter signals by controlling the on-off state of the switch MOSFET (DMG2302UK), which superimposes the sensory data on the carrier provided by the gateway. We also set three sensor interfaces on the Printed Circuit Board (PCB) to deploy different SPI-based sensors. By this, we verified the performance of Butterfly LSN by using different types of COTS sensors, including thermometers (BME280 and DS1722S), accelerometers (ADXL362, BMX160 and IIM-42351), a microphone (VM1010), and an ADC (ADS1118).
- Butterfly gateway. As presented in Figure 10b, the gateway is implemented on a software-defined radio (USRP2922) with GNU Radio software controlled by a PC, which is equipped with a 3.3 GHz i5-1035G7 CPU, 16 GB memory, and 512 GB hard disk space, running an Ubuntu 18.04 Linux operating system. The gateway can control multiple sensors on one or more LSNs wirelessly.
7.2. Proof-of-Concept Applications
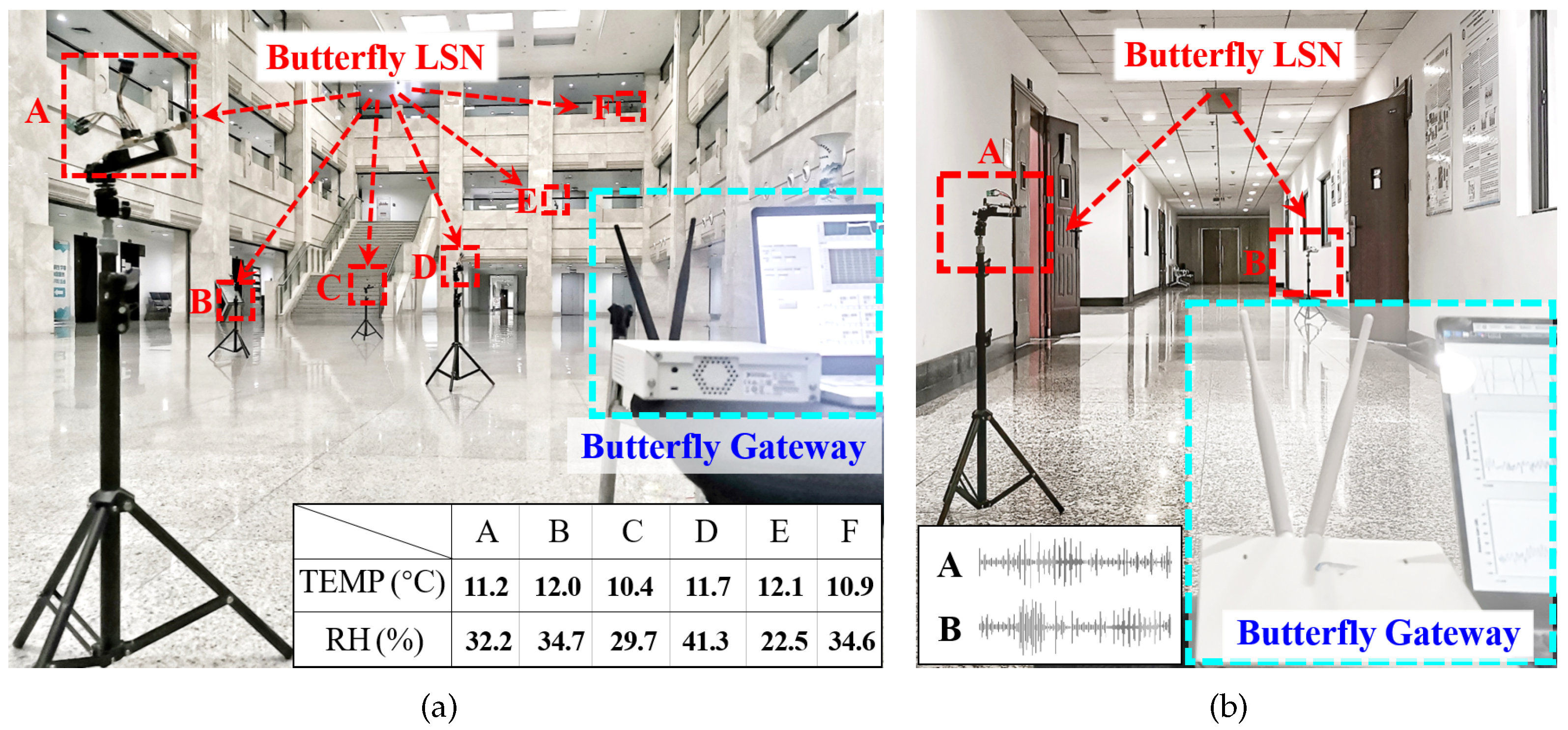
- Ambient Temperature and Humidity Meter (ATHM). As shown in Figure 11a, we monitor the air temperature and humidity in an open lobby, where six Butterfly LSNs are deployed to control the sensor for ambient sensing and return the collected sensory data to the gateway for further processing. In this application, Butterfly LSNs are equipped with a BME280 chip to collect the ambient temperature (TEMP) and Relative Humidity (RH). In the deployment of this application, all sensors deployed on all Butterfly LSNs work properly and successfully return the sensory data from six distinct locations with minimized bandwidth overhead. Specifically, to read 12,000 times of sensory data (1000 times for each sensor of the six LSN), in loop schedule mode (as described in Section 5.1), the total downlink and uplink transmission is only 1.3 kb and 47.2 kb, respectively; in real-time schedule mode, the total downlink and uplink transmission 13.3 kb and 78.9 kb, respectively.
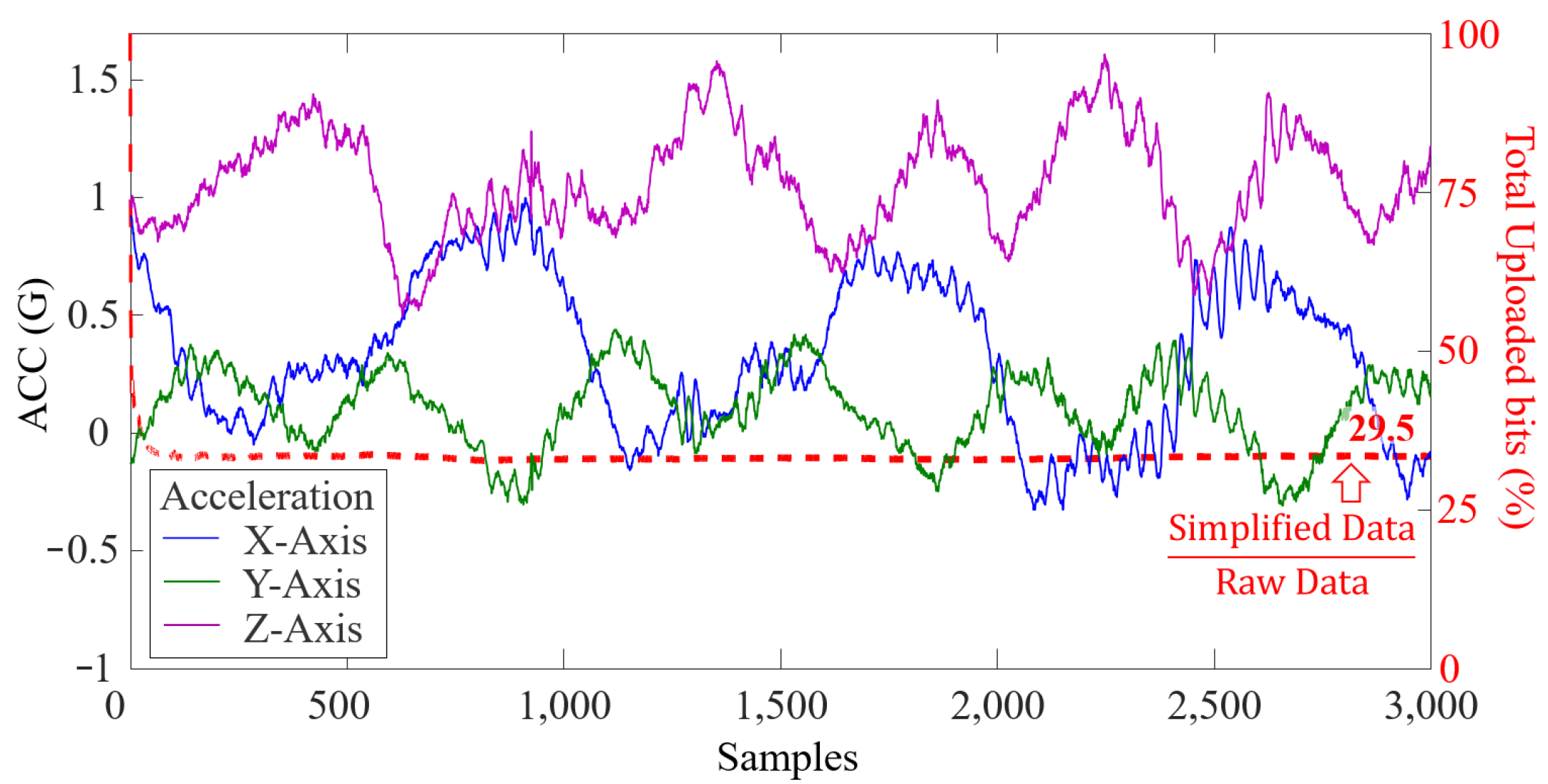
- Wireless Sound Collector (WSC). As shown in Figure 11b, we collect the environment sound in a corridor, where two Butterfly LSNs are deployed to record ambient sound and return the collected data to the gateway. In this application, a 12-bit Analog to Digital Converter (ADC) chip (LTC1285) is deployed on the LSN to sample an analogue microphone (VM1010) for ambient sound collection and return the digitized sounds information back to the gateway. In this application, all Butterfly LSNs work properly and successfully upload the sound data from two distinct locations with minimized bandwidth overhead. Specifically, to read 30 s of sound data (150 k of samples on each LSN), in loop schedule mode (as described in Section 5.1), the total uploaded data are only 570 k bit and 513 k bit by those two LSNs, respectively (the original ADC data are 3000 k bit before de-redundancy).
8. Evaluation
8.1. Benchmark Selection
- Benchmark 1, R2B node: the design of literature [9], an ultra-low-power node with direct radio-to-bus (R2B) communications that can directly control sensors by the gateway without the help of the general MCU. It has the simplest hardware architecture in node design that controls sensors with simple logic gates and a set of RC circuits and achieves the lowest power overhead in the state-of-the-art.
- Benchmark 2, Passive Bluetooth node: the design of literature [37], ULP sensor nodes with passive Bluetooth communications and ultra-low-power MSP430F2132 [38] MCU that can achieve data interactions with sensors down to 1.56 nJ per bit. In addition, this node has 232-bit size for each data packet, containing up to a 168-bit payload and 64-bit protocol, which can transmit multiple sensory data in one packet with good efficiency.
- Benchmark 3, simplest tradition node: we build a traditional node with the simplest design on embedded architecture as a baseline in the evaluation. It utilizes the same passive radio with our LSN design and controls sensors via an ultra-low-power STM32L431 [39] MCU. It only functions for sensor reading with the latest ULP MCU, thus eliminating all other influencing factors.
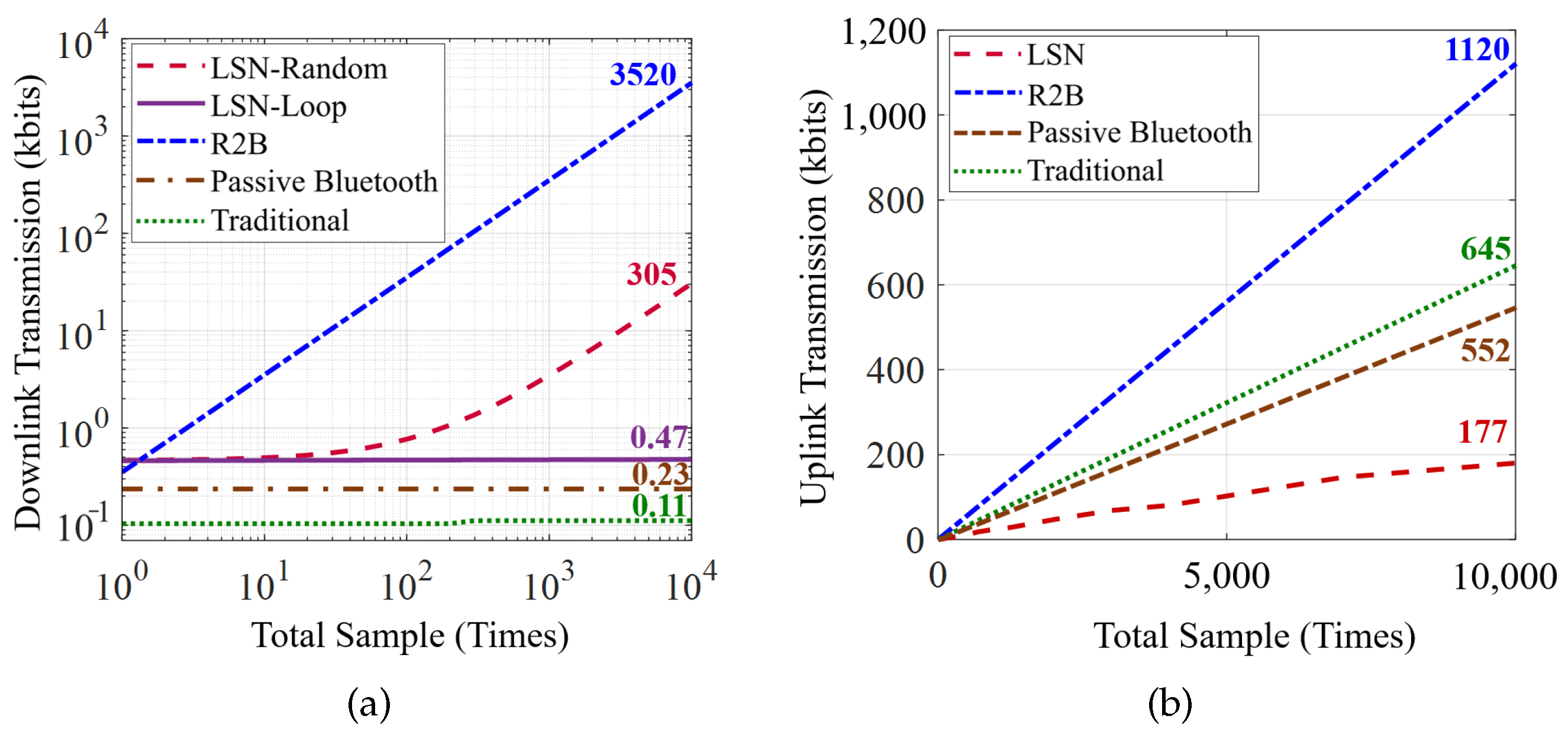
8.2. Task Efficiency
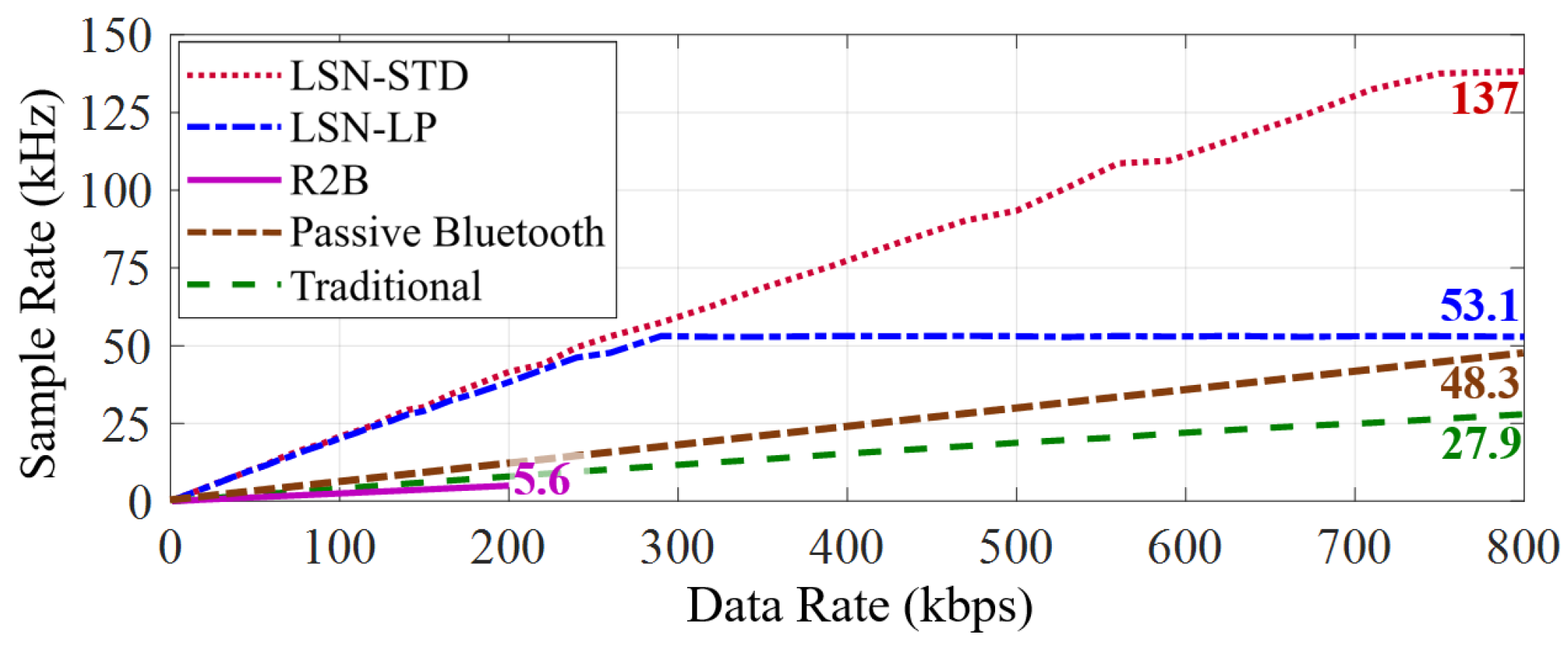
8.3. Extreme Performance
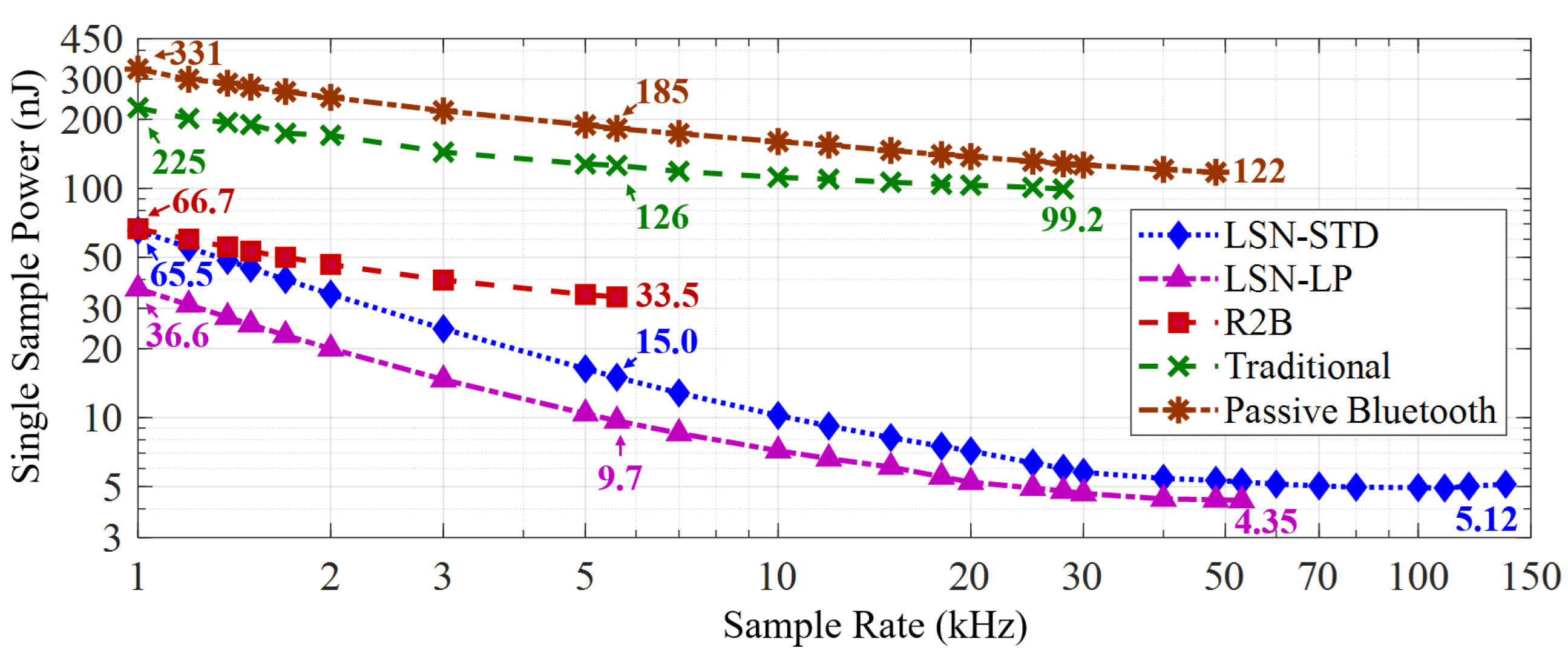
8.4. Power Overhead
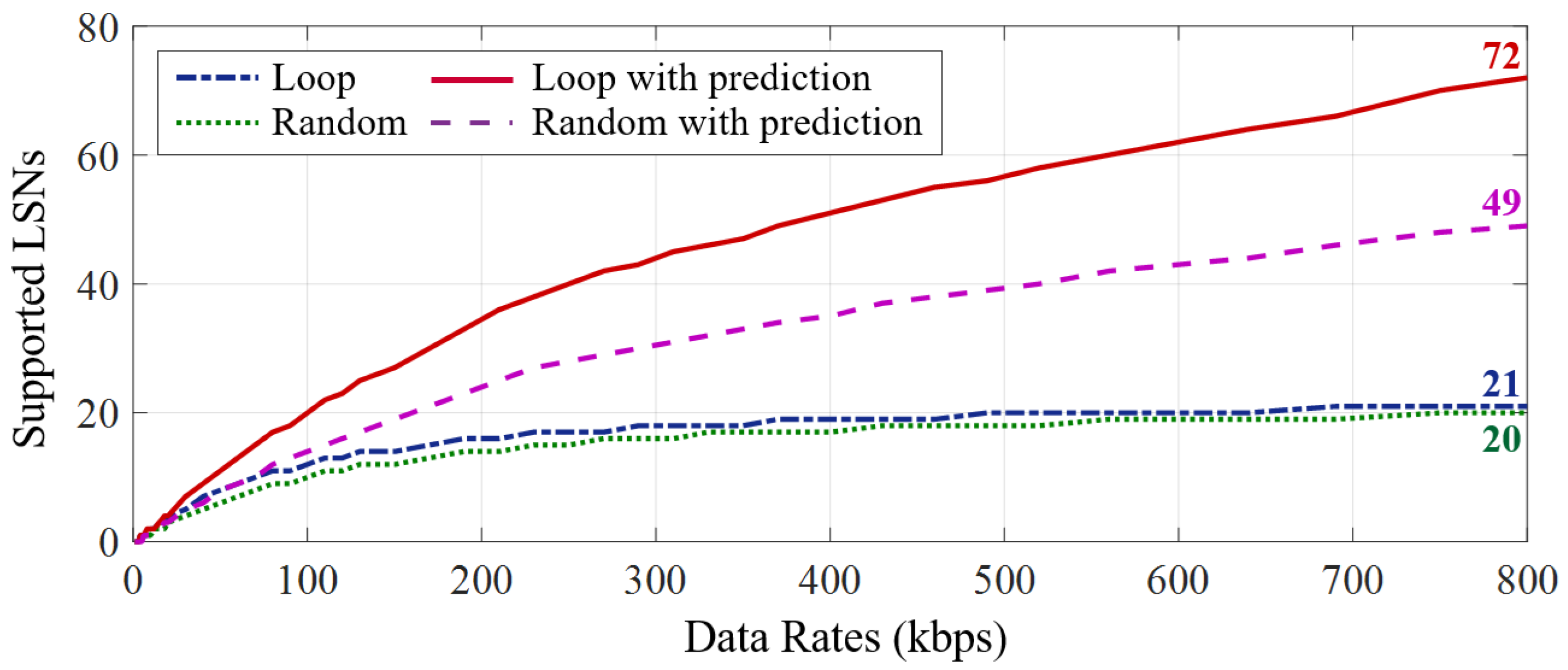
8.5. Effectiveness of the Task Prediction Mechanism
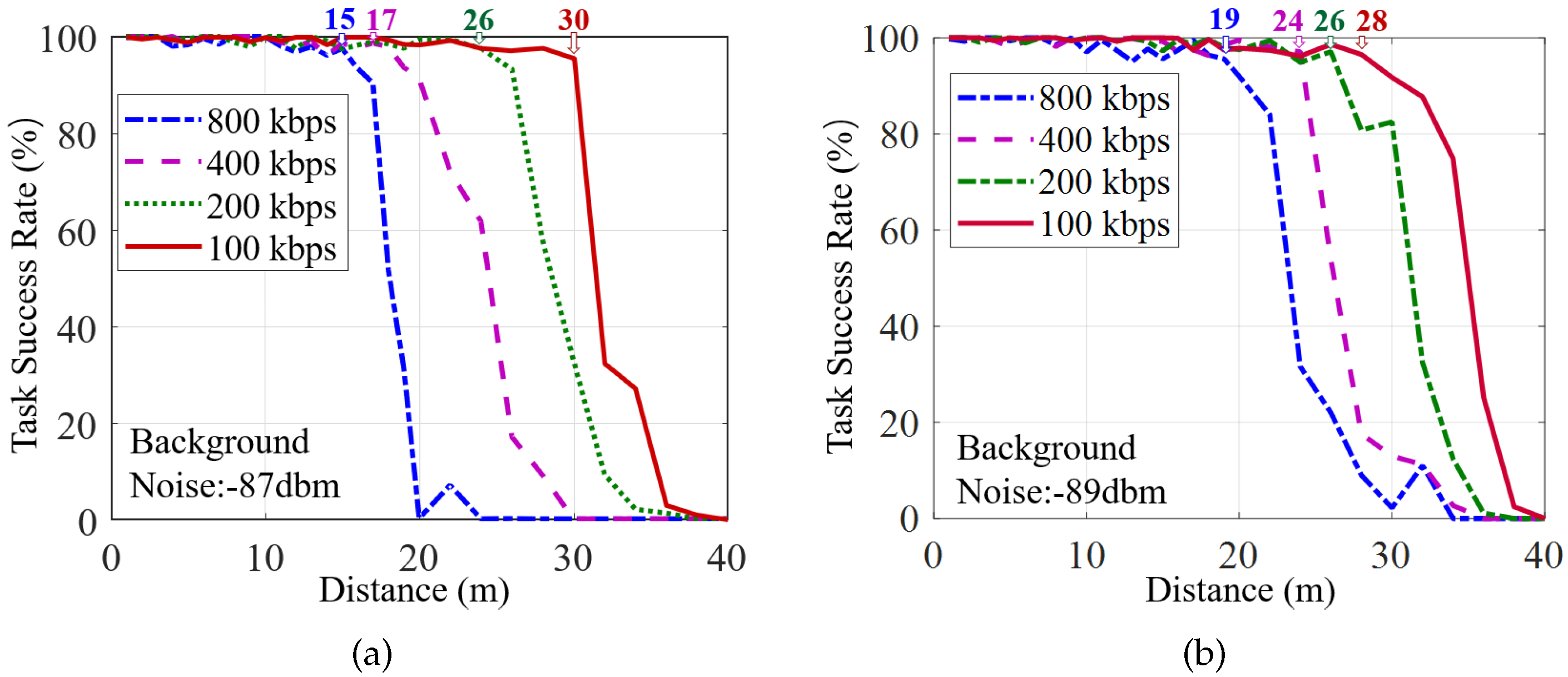
8.6. System Coverage
9. Discussion
- (1)
- Security. The removal of local MCU enhances the security of LSNs, i.e., attackers cannot obtain data by stealing the node as it contains no embedded program that avoids the security risks with key program data loss. Even if the buffered data are stolen by technical attackers, it is mostly useless for them as the data are designed for the control of COTS sensors and thus contain no privacy information. To further enhance the security of our Butterfly system, the data transmission between the gateway and LSNs could be a key consideration. Specifically, to enhance system security, lightweight encryption schemes like PRESENT [49], Data Encryption Standard Lightweight (DESL) [50], and Light Encryption Device (LED) [51] are possible to be incorporated into our further design with FSM logic design with no more than 2K logic gates (3.3% resources on the AGLN060 FPGA chip). In addition, we would also establish a whitelist mechanism on the gateway to ensure the legitimacy of nodes in the network by storing the information (device ID, sensor data structure, etc.) of legitimate nodes. Moreover, it is also possible for us to utilize hardware Trojan detecting methods [52,53,54,55] and design authentication mechanisms for sensor nodes to prevent possible attacks caused by wireless Trojan nodes connected by malicious users.
- (2)
- Error detection and data correction. In this paper, we realized the basic idea of Butterfly and achieved both ultra-low-power and high task throughput on node design. In future designs, we consider that the error detection and correction in node communication links is a key consideration that ensures the system robustness in practical applications. Specifically, we might incorporate bit level error detection and correction methods like Cyclic Redundancy Checksum (CRC) [56,57,58] and MD5 Message-Digest Algorithm (MD5) [59] by hardware FSM design with logic circuits to give the node a robust communication link. In addition, it is also possible to design the hardware FSM with logic gates to solidify functions of intelligent data recovery [60,61,62] and re-transmission [63] to further optimize the communication robustness in environments that has strong signal interference.
- (3)
- ASIC-based local processing. To further optimize the communication overhead and reduce power consumption, we consider localizing commonly used calculations with a simple ASIC design to further reduce requirements of sensory data transmission in some scenarios. For instance, in temperature monitoring scenarios, if the application only needs an alarm signal for over-threshold temperature notification, which does not need to upload all the sensed data and processing on the gateway. In that scenario, the sensed temperature data should be compared with the preset threshold value locally on the node, and the alarm information could only be uploaded when the sensed value touches the threshold. To achieve this, we consider curing some common computational logic (e.g., numeric value comparison, data averaging) with ASIC design and implementation in the future, which might further reduce the node’s power consumption while improving its task performance simultaneously.
10. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| IoT | Internet of Things |
| SPI | Serial Peripheral Interface |
| COTS | Commercial-Off-the-shelf |
| ULP | Ultra-Low-Power |
| MCU | Microcontroller |
| LSN | Lightweight Sensor Node |
| FSM | Finite State Machine |
| EBST | Efficient Bus Signal Transmission |
| DESC | Data-Efficient Sensor Control |
| TPP | Task Progress Prediction |
References
- Yeager, D.J.; Sample, A.P.; Smith, J.R. WISP: A passively powered UHF RFID tag with sensing and computation. In RFID Handbook; CRC Press: Boca Raton, FL, USA, 2017; pp. 261–276. [Google Scholar]
- Zhang, H.; Gummeson, J.; Ransford, B.; Fu, K. Moo: A Batteryless Computational RFID and Sensing Platform; University of Massachusetts Computer Science Technical Report UM-CS-2011-020; UMass Amherst: Amherst, MA, USA; Available online: https://web.cs.umass.edu/publication/docs/2011/UM-CS-2011-020.pdf (accessed on 27 June 2011).
- Zhao, J.; Wu, H.; Li, D.A.; Li, Y.; Zhu, B. LILAC: Computable capabilities based high performance protocol for CRFID. IET Commun. 2019, 13, 1348–1355. [Google Scholar] [CrossRef]
- Ransford, B.; Clark, S.; Salajegheh, M.; Fu, K. Getting Things Done on Computational RFIDs with Energy-Aware Checkpointing and Voltage-Aware Scheduling; USENIX Association: Berkeley, CA, USA; Available online: https://www.usenix.org/legacy/events/hotpower08/tech/\full_papers/ransford/ransford.pdf (accessed on 7 December 2008).
- Buettner, M.; Greenstein, B.; Wetherall, D. Dewdrop: An {Energy-Aware} Runtime for Computational {RFID}. In Proceedings of the 8th USENIX Symposium on Networked Systems Design and Implementation (NSDI 11), Boston, MA, USA, 30 March–1 April 2011. [Google Scholar]
- Beckman, P.; Sankaran, R.; Catlett, C.; Ferrier, N.; Jacob, R.; Papka, M. Waggle: An open sensor platform for edge computing. In Proceedings of the 2016 IEEE SENSORS, Orlando, FL, USA, 30 October–2 November 2016; pp. 1–3. [Google Scholar]
- Xu, Y.; Nascimento, N.M.M.; de Sousa, P.H.F.; Nogueira, F.G.; Torrico, B.C.; Han, T.; Jia, C.; Rebouças Filho, P.P. Multi-sensor edge computing architecture for identification of failures short-circuits in wind turbine generators. Appl. Soft Comput. 2021, 101, 107053. [Google Scholar] [CrossRef]
- Raj, J.S.; Jennifer, S. Optimized mobile edge computing framework for IoT based medical sensor network nodes. J. Ubiquitous Comput. Commun. Technol. 2021, 3, 33–42. [Google Scholar]
- Li, S.; Zhang, C.; Song, Y.; Zheng, H.; Liu, L.; Lu, L.; Li, M. Internet-of-Microchips: Direct Radio-to-Bus Communication with SPI Backscatter. In Proceedings of the The 26th Annual International Conference on Mobile Computing and Networking, MobiCom ’20, London, UK, 21–25 September 2020; Association for Computing Machinery: London, UK, 2020. [Google Scholar]
- Sample, A.P.; Yeager, D.J.; Powledge, P.S.; Mamishev, A.V.; Smith, J.R. Design of an RFID-based battery-free programmable sensing platform. IEEE Trans. Instrum. Meas. 2008, 57, 2608–2615. [Google Scholar] [CrossRef]
- La Rosa, R.; Zoppi, G.; Di Donato, L.; Sorbello, G.; Di Carlo, C.; Livreri, P. A battery-free smart sensor powered with rf energy. In Proceedings of the 2018 IEEE 4th International Forum on Research and Technology for Society and Industry (RTSI), Palermo, Italy, 10–13 September 2018; pp. 1–4. [Google Scholar]
- Daskalakis, S.N.; Goussetis, G.; Georgiadis, A. NFC hybrid harvester for battery-free agricultural sensor nodes. In Proceedings of the 2019 IEEE International Conference on RFID Technology and Applications (RFID-TA), Pisa, Italy, 25–27 September 2019; pp. 22–25. [Google Scholar]
- Chamanian, S.; Uluşan, H.; Zorlu, Ö.; Baghaee, S.; Uysal-Biyikoglu, E.; Külah, H. Wearable battery-less wireless sensor network with electromagnetic energy harvesting system. Sens. Actuators A Phys. 2016, 249, 77–84. [Google Scholar] [CrossRef]
- Vandelle, E.; Vuong, T.P.; Ardila, G.; Wu, K.; Hemour, S. Harvesting ambient RF energy efficiently with optimal angular coverage. IEEE Trans. Antennas Propag. 2018, 67, 1862–1873. [Google Scholar] [CrossRef]
- Muncuk, U.; Alemdar, K.; Sarode, J.D.; Chowdhury, K.R. Multiband ambient RF energy harvesting circuit design for enabling batteryless sensors and IoT. IEEE Internet Things J. 2018, 5, 2700–2714. [Google Scholar] [CrossRef]
- Gu, X.; Hemour, S.; Wu, K. Enabling far-field ambient energy harvesting through multi-physical sources. In Proceedings of the 2018 Asia-Pacific Microwave Conference (APMC), Kyoto, Japan, 6–9 November 2018; pp. 204–206. [Google Scholar]
- Chamanian, S.; Çiftci, B.; Uluşan, H.; Muhtaroğlu, A.; Külah, H. Power-efficient hybrid energy harvesting system for harnessing ambient vibrations. IEEE Trans. Circuits Syst. I Regul. Pap. 2019, 66, 2784–2793. [Google Scholar] [CrossRef]
- Vu, H.S.; Nguyen, N.; Ha-Van, N.; Seo, C.; Le, M.T. Multiband ambient RF energy harvesting for autonomous IoT devices. IEEE Microw. Wirel. Compon. Lett. 2020, 30, 1189–1192. [Google Scholar] [CrossRef]
- Pau, G.; Salerno, V.M. Wireless sensor networks for smart homes: A fuzzy-based solution for an energy-effective duty cycle. Electronics 2019, 8, 131. [Google Scholar] [CrossRef] [Green Version]
- Labbé, B.; Fan, P.; Achuthan, T.; Prabhat, P.; Knight, G.P.; Myers, J. A Supply Voltage Control Method for Performance Guaranteed Ultra-Low-Power Microcontroller. IEEE J. Solid-State Circuits 2020, 56, 601–611. [Google Scholar] [CrossRef]
- Samie, F.; Tsoutsouras, V.; Bauer, L.; Xydis, S.; Soudris, D.; Henkel, J. Computation offloading and resource allocation for low-power IoT edge devices. In Proceedings of the 2016 IEEE 3rd World Forum on Internet of Things (WF-IoT), Reston, VA, USA, 12–14 December 2016; pp. 7–12. [Google Scholar]
- Hussein, M.K.; Mousa, M.H. Efficient task offloading for IoT-based applications in fog computing using ant colony optimization. IEEE Access 2020, 8, 37191–37201. [Google Scholar] [CrossRef]
- Wang, L.; Shao, H.; Li, J.; Wen, X.; Lu, Z. Optimal multi-user computation offloading strategy for wireless powered sensor networks. IEEE Access 2020, 8, 35150–35160. [Google Scholar] [CrossRef]
- Aazam, M.; Zeadally, S.; Harras, K.A. Offloading in fog computing for IoT: Review, enabling technologies, and research opportunities. Future Gener. Comput. Syst. 2018, 87, 278–289. [Google Scholar] [CrossRef]
- Wang, M.; Zhu, L.; Yang, L.T.; Lin, M.; Deng, X.; Yi, L. Offloading-assisted energy-balanced IoT edge node relocation for confident information coverage. IEEE Internet Things J. 2018, 6, 4482–4490. [Google Scholar] [CrossRef]
- Elmi, I.; Zampolli, S.; Cozzani, E.; Passini, M.; Pizzochero, G.; Cardinali, G.; Severi, M. Ultra low power MOX sensors with ppb-level VOC detection capabilities. In Proceedings of the SENSORS, Atlanta, GA, USA, 28–31 October 2007; pp. 170–173. [Google Scholar]
- Palacio, F.; Fonollosa, J.; Burgués, J.; Gomez, J.M.; Marco, S. Pulsed-temperature metal oxide gas sensors for microwatt power consumption. IEEE Access 2020, 8, 70938–70946. [Google Scholar] [CrossRef]
- Liu, W.; Huang, K.; Zhou, X.; Durrani, S. Next generation backscatter communication: Systems, techniques, and applications. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Wang, G.; Gao, F.; Fan, R.; Tellambura, C. Ambient backscatter communication systems: Detection and performance analysis. IEEE Trans. Commun. 2016, 64, 4836–4846. [Google Scholar] [CrossRef]
- Xu, C.; Yang, L.; Zhang, P. Practical backscatter communication systems for battery-free Internet of Things: A tutorial and survey of recent research. IEEE Signal Process. Mag. 2018, 35, 16–27. [Google Scholar] [CrossRef]
- Parks, A.N.; Liu, A.; Gollakota, S.; Smith, J.R. Turbocharging ambient backscatter communication. ACM SIGCOMM Comput. Commun. Rev. 2014, 44, 619–630. [Google Scholar] [CrossRef]
- Huston, B. Single-chip microcomputers can be easy to program. In Proceedings of the National Computer Conference, Houston, TX, USA, 7–10 June 1982; pp. 85–93. [Google Scholar]
- Ransford, B.; Sorber, J.; Fu, K. Mementos: System support for long-running computation on RFID-scale devices. In Proceedings of the Sixteenth International Conference on Architectural Support for Programming Languages and Operating Systems, Newport Beach, CA, USA, 5–11 March 2011; pp. 159–170. [Google Scholar]
- Dhaker, P. Introduction to SPI interface. Analog Dialogue 2018, 52, 49–53. [Google Scholar]
- 2 °C Accurate Digital Temperature Sensor with SPI Interface. Available online: https://www.ti.com/product/TMP125?keyMatch=TMP125 (accessed on 11 June 2005).
- SiT1581 1.2 mm2 µPower, Low-Jitter, 1 Hz–2.5 MHz Oscillator. 2021. Available online: https://www.sitime.com/support/resource-library/datasheets/sit1581-datasheet (accessed on 29 March 2021).
- Ensworth, J.F.; Reynolds, M.S. BLE-Backscatter: Ultralow-Power IoT Nodes Compatible With Bluetooth 4.0 Low Energy (BLE) Smartphones and Tablets. IEEE Trans. Microw. Theory Tech. 2017, 65, 3360–3368. [Google Scholar] [CrossRef]
- MSP430F2132, 16 MHz MCU with 8KB Flash, 512B SRAM, 10-bit ADC, Comparator, I2C/SPI/UART. Available online: https://www.ti.com/product/MSP430F2132?keyMatch=MSP430F2132/ (accessed on 1 December 2004).
- Ultra-Low-Power with FPU Arm Cortex-M4 MCU 80 MHz with 256 Kbytes of Flash Memory. Available online: https://www.st.com/en/microcontrollers-microprocessors/stm32l431vc.html (accessed on 2 May 2018).
- Libero SoC v12.0 and Later. 2021. Available online: https://www.microsemi.com/product-directory/vectorblox-ai/5598-libero-soc (accessed on 2 May 2020).
- AN4621 Application Note, STM32L4 and STM32L4+ Ultra-Low-Power Features Overview. Available online: http://ww1.microchip.com/downloads/en/DeviceDoc/AT24C01C-AT24C02C-I2C-Compatible-Two-Wire-Serial-EEPROM-1Kbit-2Kbit-20006111A.pdf (accessed on 2 May 2018).
- Jiang, L.; Liu, D.Y.; Yang, B. Smart home research. In Proceedings of the International Conference on Machine Learning & Cybernetics, Shanghai, China, 26–29 August 2004. [Google Scholar]
- Kodeswaran, P.; Kokku, R.; Mallick, M.; Sen, S. Demultiplexing activities of daily living in IoT enabled smarthomes. In Proceedings of the IEEE INFOCOM 2016—IEEE Conference on Computer Communications, San Francisco, CA, USA, 10–14 April 2016. [Google Scholar]
- Patel, A.; Champaneria, T.A. Fuzzy logic based algorithm for Context Awareness in IoT for Smart home environment. In Proceedings of the TENCON 2016—IEEE Region 10 Conference, Singapore, 22–25 November 2017. [Google Scholar]
- Kannengiesser, U.; Neubauer, M.; Heininger, R. Subject-Oriented BPM as the Glue for Integrating Enterprise Processes in Smart Factories. In Proceedings of the On the Move to Meaningful Internet Systems: OTM 2015 Workshops, Rhodes, Greece, 26–30 October 2015; pp. 77–86. Available online: https://link.springer.com/chapter/10.1007/978-3-319-26138-6_11 (accessed on 28 October 2015).
- Bakc, T.; Almirall, E.; Wareham, J. A Smart City Initiative: The Case of Barcelona. J. Knowl. Econ. 2013, 4, 135–148. [Google Scholar]
- Vejlgaard, B.; Lauridsen, M.; Nguyen, H.; Kovács, I.Z.; Mogensen, P.; Sorensen, M. Coverage and capacity analysis of sigfox, lora, gprs, and nb-iot. In Proceedings of the 2017 IEEE 85th vehicular technology conference (VTC Spring), Sydney, Australia, 4–7 June 2017; pp. 1–5. [Google Scholar]
- Lauridsen, M.; Nguyen, H.; Vejlgaard, B.; Kovács, I.Z.; Mogensen, P.; Sorensen, M. Coverage comparison of GPRS, NB-IoT, LoRa, and SigFox in a 7800 km2 area. In Proceedings of the 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, Australia, 4–7 June 2017; pp. 1–5. [Google Scholar]
- Bogdanov, A.; Knudsen, L.R.; Leander, G.; Paar, C.; Poschmann, A.; Robshaw, M.J.; Seurin, Y.; Vikkelsoe, C. PRESENT: An ultra-lightweight block cipher. In Proceedings of the International Workshop on Cryptographic Hardware and Embedded Systems, Taipei, Taiwan, 25–28 September 2007; Springer: Berlin, Germany, 2007; pp. 450–466. [Google Scholar]
- Poschmann, A.; Leander, G.; Schramm, K.; Paar, C. New light-weight crypto algorithms for RFID. In Proceedings of the 2007 IEEE International Symposium on Circuits and Systems, Marrakech, Morocco, 11–14 December 2007; pp. 1843–1846. [Google Scholar]
- Guo, J.; Peyrin, T.; Poschmann, A.; Robshaw, M. The LED block cipher. In Proceedings of the International Workshop on Cryptographic Hardware and Embedded Systems, Nara, Japan, 28 September–1 October 2011; Springer: Berlin, Germany, 2011; pp. 326–341. [Google Scholar]
- Liu, Y.; Volanis, G.; Huang, K.; Makris, Y. Concurrent hardware Trojan detection in wireless cryptographic ICs. In Proceedings of the 2015 IEEE International Test Conference (ITC), Atlantic City, NJ, USA, 1–6 September 2015; pp. 1–8. [Google Scholar]
- Liu, Y.; Jin, Y.; Nosratinia, A.; Makris, Y. Silicon demonstration of hardware Trojan design and detection in wireless cryptographic ICs. IEEE Trans. Very Large Scale Integr. Syst. 2016, 25, 1506–1519. [Google Scholar] [CrossRef]
- Subramani, K.S.; Helal, N.; Antonopoulos, A.; Nosratinia, A.; Makris, Y. Amplitude-modulating analog/rf hardware trojans in wireless networks: Risks and remedies. IEEE Trans. Inf. Forensics Secur. 2020, 15, 3497–3510. [Google Scholar] [CrossRef]
- Ali, L. Analog hardware trojan design and detection in OFDM based wireless cryptographic ICs. PLoS ONE 2021, 16, e0254903. [Google Scholar] [CrossRef]
- Nair, R.; Ryan, G.; Farzaneh, F. A symbol based algorithm for hardware implementation of cyclic redundancy check (CRC). In Proceedings of the Proceedings VHDL International Users’ Forum, Fall Conference, Arlington, VA, USA, 19–22 October 1997; pp. 82–87. [Google Scholar]
- Qaqos, N.N. Optimized FPGA implementation of the CRC using parallel pipelining architecture. In Proceedings of the 2019 International Conference on Advanced Science and Engineering (ICOASE), Zakho-Duhok, Iraq, 2–4 April 2019; pp. 46–51. [Google Scholar]
- Tran, D.; Aslam, S.; Gorius, N.; Nehmetallah, G. Parallel Computation of CRC-Code on an FPGA Platform for High Data Throughput. Electronics 2021, 10, 866. [Google Scholar] [CrossRef]
- Jin, Z.; Finkel, H. Evaluation of MD5Hash kernel on OpenCL FPGA platform. In Proceedings of the 2018 IEEE International Parallel and Distributed Processing Symposium Workshops (IPDPSW), Vancouver, BC, Canada, 25 May 2018; pp. 1026–1032. [Google Scholar]
- Izonin, I.; Kryvinska, N.; Vitynskyi, P.; Tkachenko, R.; Zub, K. GRNN approach towards missing data recovery between IoT systems. In Proceedings of the International Conference on Intelligent Networking and Collaborative Systems; Springer: Berlin, Germany, 2019; pp. 445–453. [Google Scholar]
- Izonin, I.; Tkachenko, R.; Kryvinska, N.; Zub, K.; Mishchuk, O.; Lisovych, T. Recovery of incomplete IoT sensed data using high-performance extended-input neural-like structure. Procedia Comput. Sci. 2019, 160, 521–526. [Google Scholar] [CrossRef]
- Cheng, H.; Shi, Y.; Wu, L.; Guo, Y.; Xiong, N. An intelligent scheme for big data recovery in Internet of Things based on multi-attribute assistance and extremely randomized trees. Inf. Sci. 2021, 557, 66–83. [Google Scholar] [CrossRef]
- Ahmad, M.; Habib, M.A.; Ashraf, R.; Shahid, M. Enhancement in Data-Recovery and Re-Transmit Mechanisms of TCP. In Proceedings of the 2017 IEEE 42nd Conference on Local Computer Networks Workshops (LCN Workshops), Singapore, 9 October 2017; pp. 183–187. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Rate | FSM | Rest 4 Part | Total | Sample Rate | Single Sample | ||
|---|---|---|---|---|---|---|---|
| EBST 1 | DESC 2 | Static 3 | |||||
| 50 kbps | 7 W | 34 W | 11 W | 57 W | 109 W | 10.8 kHz | 10.1 nJ |
| 100 kbps | 13 W | 67 W | 11 W | 58 W | 149 W | 21.5 kHz | 6.93 nJ |
| 200 kbps | 22 W | 132 W | 11 W | 60 W | 225 W | 42.7 khz | 5.27 nJ |
| 400 kbps | 43 W | 261 W | 11 W | 63 W | 378 W | 75.2 kHz | 5.03 nJ |
| 600 kbps | 65 W | 397 W | 11 W | 68 W | 541 W | 109.8 kHz | 4.93 nJ |
| 800 kbps | 86 W | 532 W | 11 W | 74 W | 703 W | 137.3 kHz | 5.12 nJ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Lu, L.; Song, Y.; Meng, Q.; Zhang, J.; Shao, X.; Zhang, G.; Hou, M. Butterfly: μW Level ULP Sensor Nodes with High Task Throughput. Sensors 2022, 22, 3082. https://doi.org/10.3390/s22083082
Zhang C, Lu L, Song Y, Meng Q, Zhang J, Shao X, Zhang G, Hou M. Butterfly: μW Level ULP Sensor Nodes with High Task Throughput. Sensors. 2022; 22(8):3082. https://doi.org/10.3390/s22083082
Chicago/Turabian StyleZhang, Chong, Li Lu, Yihang Song, Qianhe Meng, Junqin Zhang, Xiandong Shao, Guangyuan Zhang, and Mengshu Hou. 2022. "Butterfly: μW Level ULP Sensor Nodes with High Task Throughput" Sensors 22, no. 8: 3082. https://doi.org/10.3390/s22083082