
Road Speed Prediction Scheme by Analyzing Road Environment Data


Abstract
:1. Introduction
2. Related Work
2.1. Road Congestion Prediction Schemes Using CNNs
2.2. Road Speed Prediction Scheme Using a Bayesian Network
2.3. Road Speed Prediction Scheme Using LSTM
2.4. Problems Faced by Existing Schemes
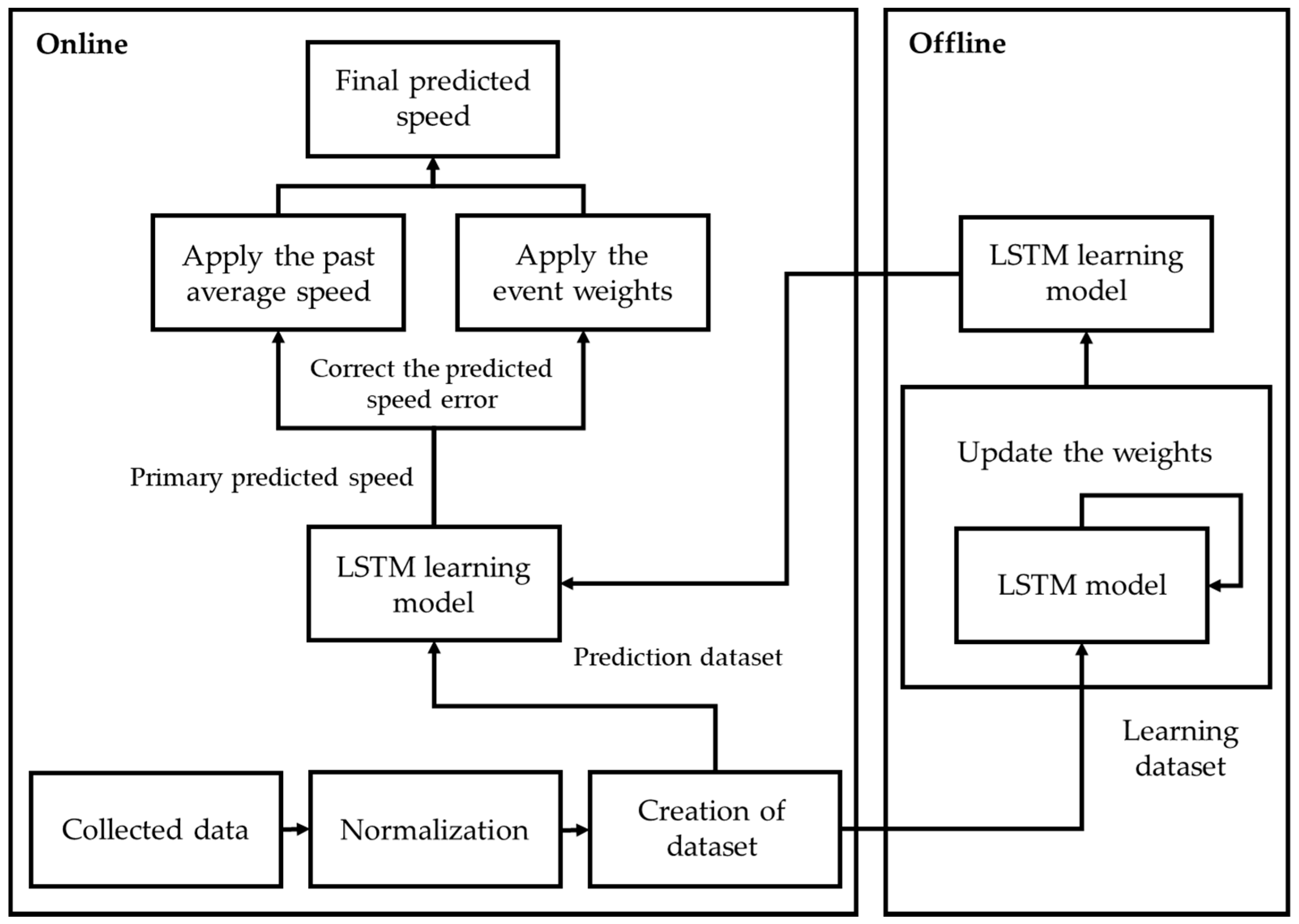
3. Proposed Road Speed Prediction Scheme
3.1. Overall Processing Approach
3.2. Normalization
3.3. Generation of a Dataset
3.4. Training of a Prediction Model
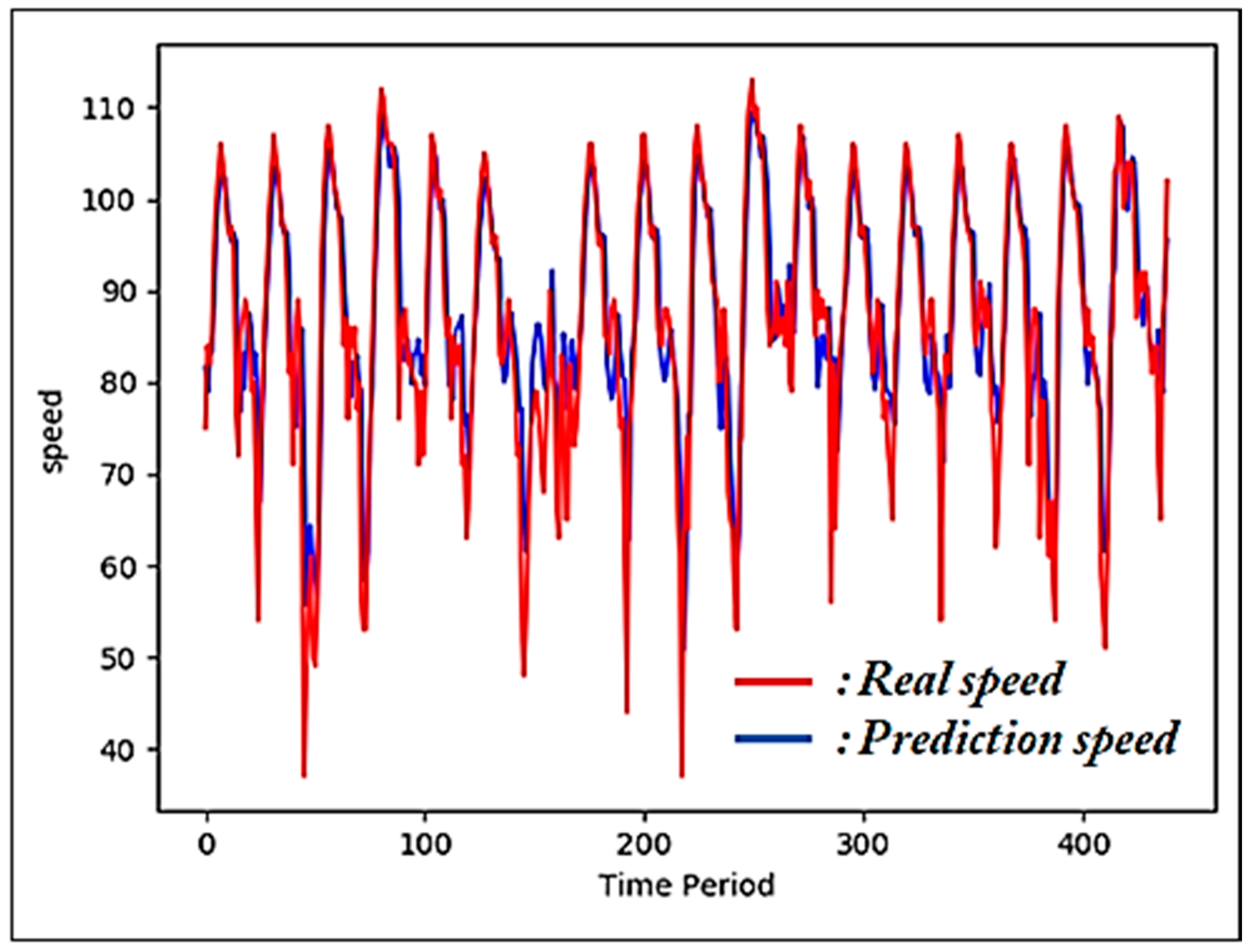
3.5. Primary Speed Prediction
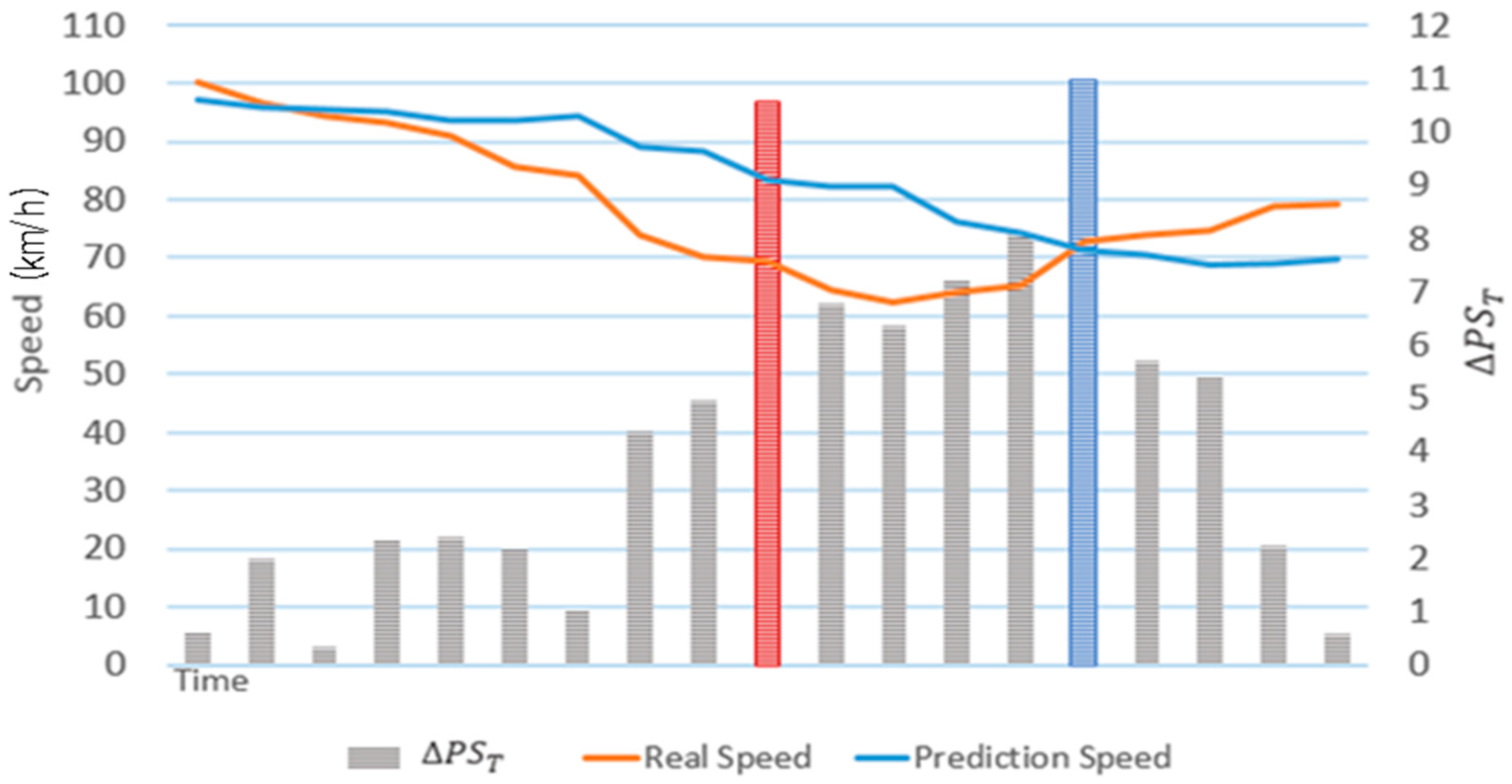
3.6. Correction of Predicted Speed
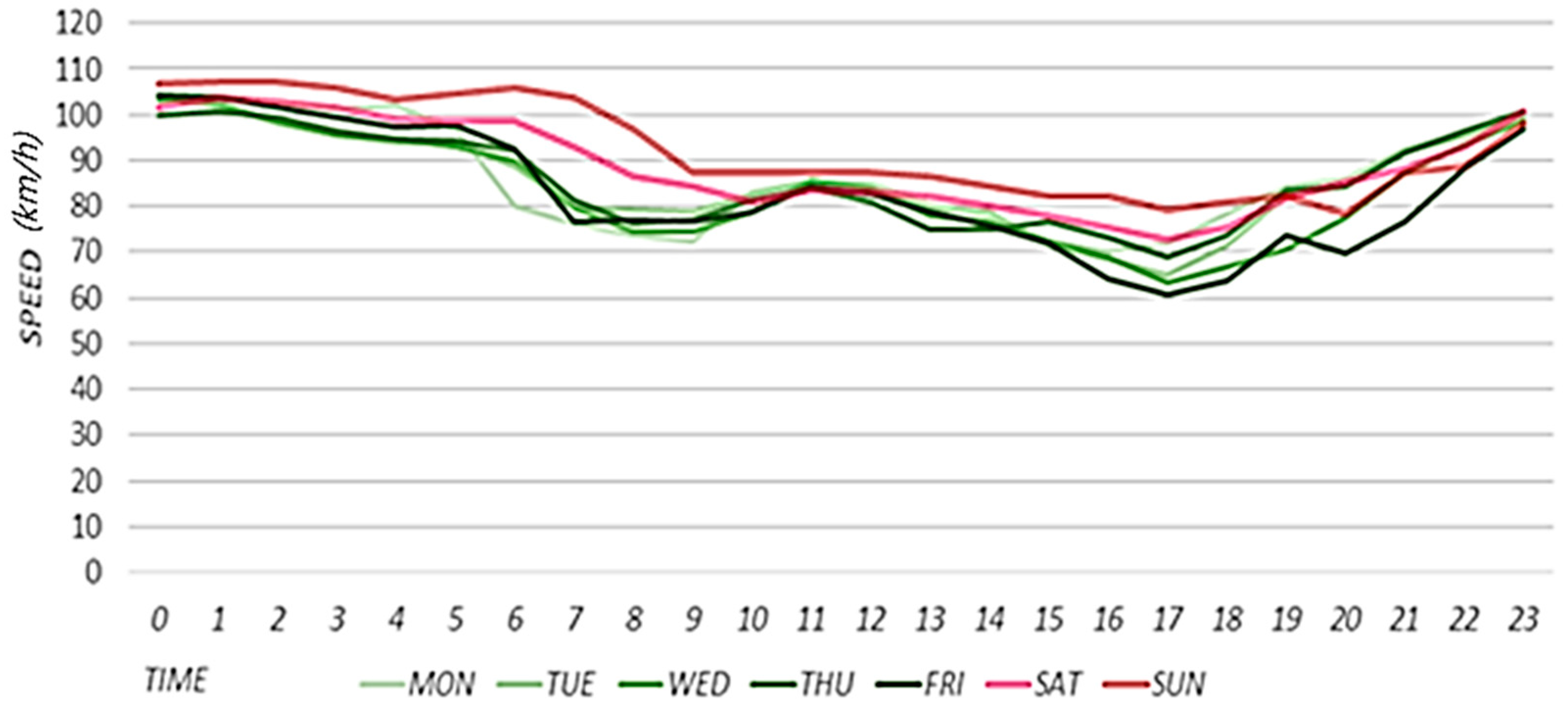
3.6.1. Application of Historical Average Speeds
3.6.2. Application of Event Weights
| Algorithm 1: Event Weighting Algorithm (Decrease Section) |
| Notation: Speed Decrease Criteria1 = 6; Speed Decrease Criteria2 = 10; Decrease Weight (dw) = 0.8; Count = 1; Input: , , Output: |
| if and then check_recovery_criterial; if then switch(int) Count = 1; end if Count++; end if if Count = 6 then Count = 1; end if if then break; end if return |
| Algorithm 2: Event Weighting Algorithm (Recovery Section) |
| Notation: Recovery Weight (rw) = 0.2; Count = 0; Input: Output: |
| if Count = 6 then |
| Count = 0;
end if |
|
Count++;
end if return |
4. Performance Evaluation
4.1. Performance Evaluation Environment
4.2. Standalone Performance Evaluation
4.2.1. Results Obtained by Reflecting Weather
4.2.2. Results Obtained by Reflecting Historical Average Speeds
4.2.3. Results Obtained by Reflecting Event Weights
4.3. Performance Comparison
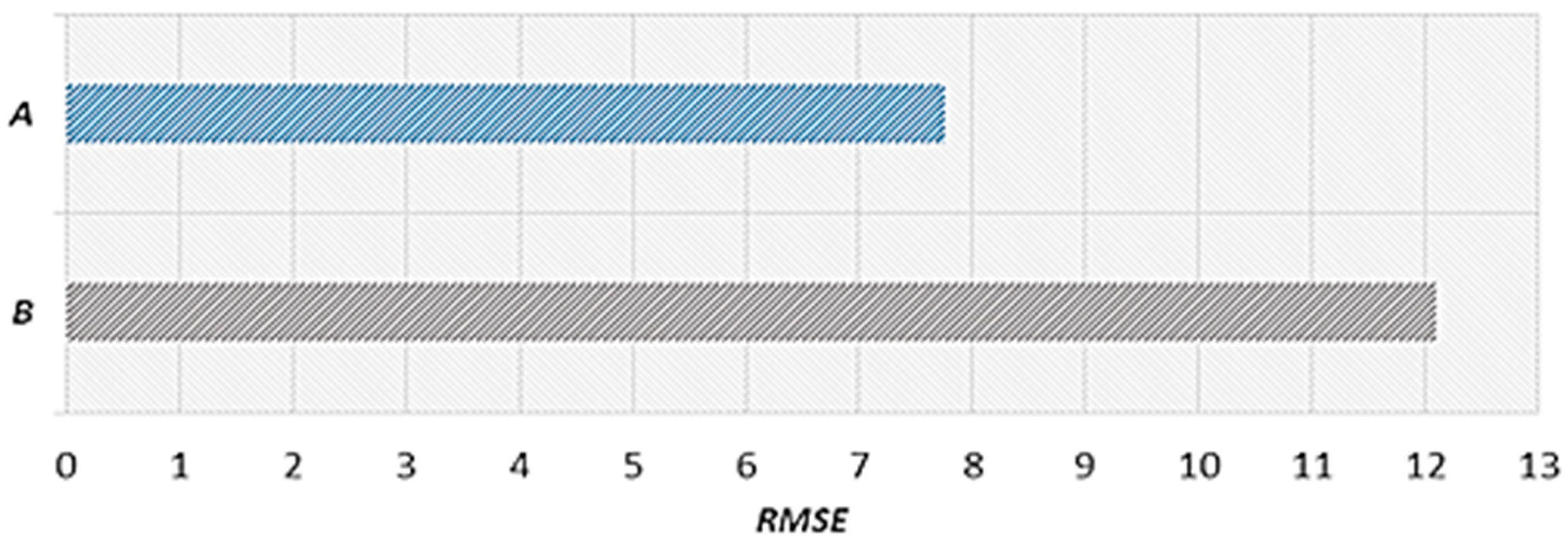
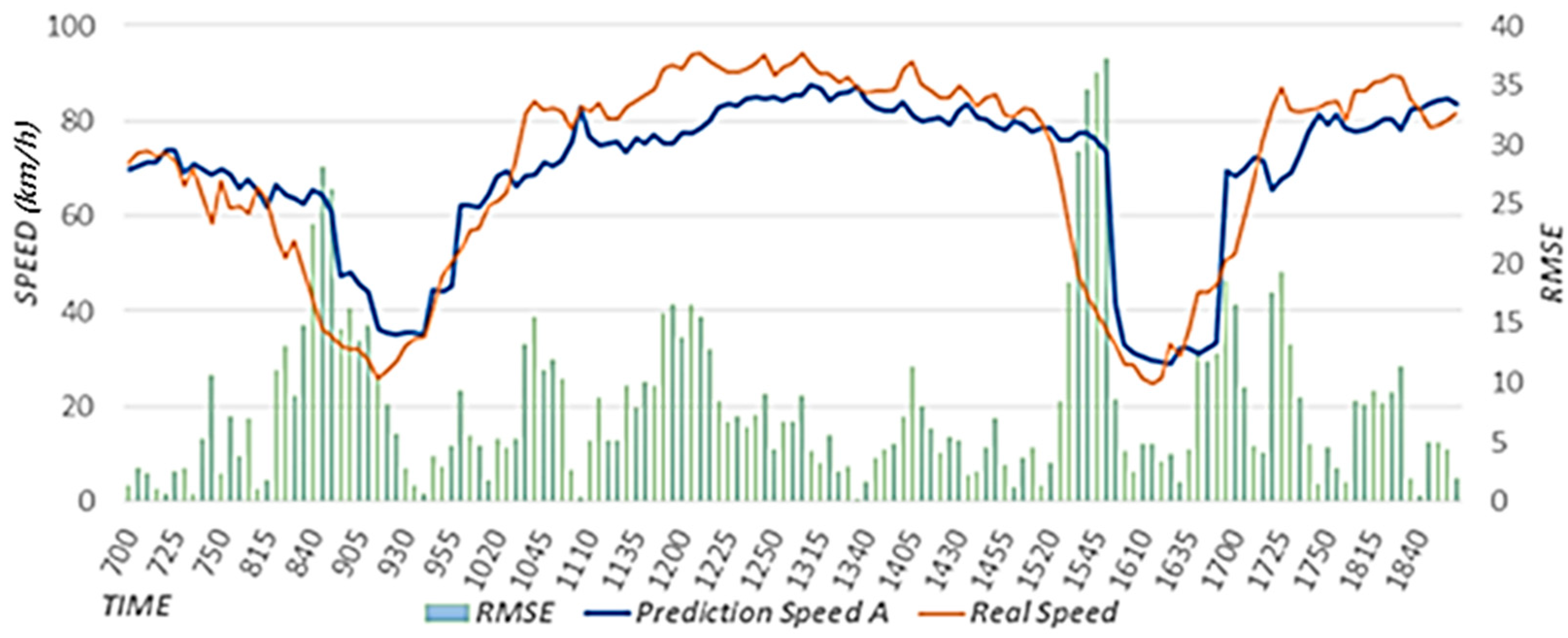
4.3.1. Performance Comparison between the TN-P Scheme and Proposed Scheme
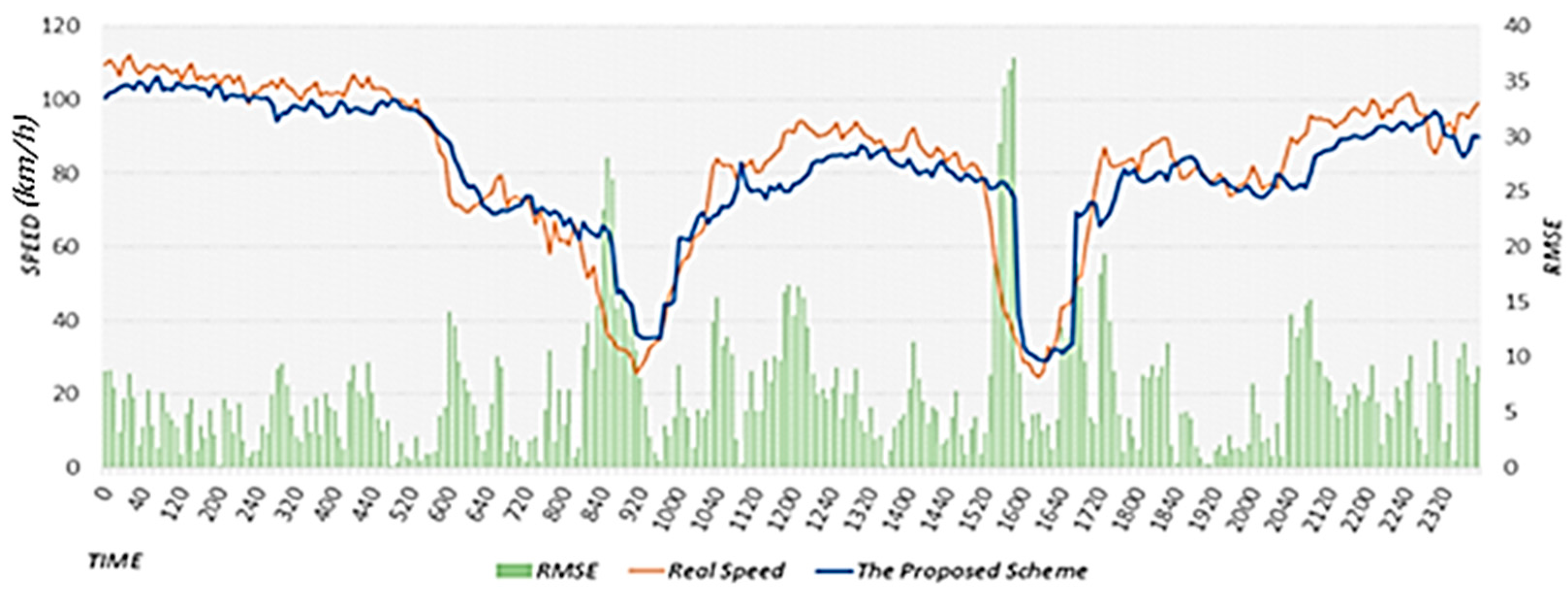
4.3.2. Performance Comparison between the RNN-P Scheme and Proposed Scheme
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lee, C. A Study on Sustainable Urban Transportation Management (white paper). Seoul, Korea. 2014. [Google Scholar]
- Choi, G. Analysis of Traffic Information Status and Improvement of Accuracy (white paper). Traffic Inf. Platf. Forum 2015. [Google Scholar]
- Kang, J.; Kim, M.; Lee, J. Analysis of Trajectory Encoding Schemeology Analysis Based on Experimental Evaluation for Deep Learning. KIISE Trans. Comput. Pract. 2019, 25, 402–406. [Google Scholar] [CrossRef]
- Song, Y.; Kim, S. Traffic Congestion Prediction System Using the Urban Data and Space Syntax. J. Archit. Inst. Korea Plan. Des. 2016, 32, 91–100. [Google Scholar] [CrossRef]
- Yu, Y.; Moon, S.; Park, S. Analysis of KNN Algorithm for Speed Prediction in Urban Roads. J. Multimed. Serv. Converg. Art Humanit. Sociol. 2017, 7, 245–253. [Google Scholar] [CrossRef]
- Yoo, Y.; Cho, M. A Short-Traffic Information Prediction Model Using Bayesian Network. J. Korea Inst. Inf. Commun. Eng. 2009, 13, 765–773. [Google Scholar]
- Jia, R.; Jiang, P.; Liu, L.; Cui, L.; Shi, Y. Data driven congestion trends prediction of urban transportation. IEEE Internet Things J. 2018, 5, 581–591. [Google Scholar] [CrossRef]
- Fouladgar, M.; Parchami, M.; Elmasri, R.; Ghaderi, A. Scalable deep traffic flow neural networks for urban traffic congestion prediction. In Proceedings of the 2017 International Joint Conference on Neural Networks (IJCNN), Anchorage, AK, USA, 14–19 May 2017; pp. 2251–2258. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Li, Z.; Wu, K.; Li, M. Urban traffic prediction from mobility data using deep learning. IEEE Netw. 2018, 32, 40–46. [Google Scholar] [CrossRef]
- Tseng, F.H.; Hsueh, J.H.; Tseng, C.W.; Yang, Y.T.; Chao, H.C.; Chou, L.D. Congestion prediction with big data for real-time highway traffic. IEEE Access 2018, 6, 57311–57323. [Google Scholar] [CrossRef]
- Duan, Z.; Yang, Y.; Zhang, K.; Ni, Y.; Bajgain, S. Improved deep hybrid networks for urban traffic flow prediction using trajectory data. IEEE Access 2018, 6, 31820–31827. [Google Scholar] [CrossRef]
- Clark, S. Traffic prediction using multivariate nonparametric regression. J. Transp. Eng. 2003, 129, 161–169. [Google Scholar] [CrossRef]
- Shu, Y.; Jin, Z.; Zhang, L.; Wang, L.; Yang, O.W. Traffic prediction using FARIMA models. In Proceedings of the IEEE International Conference on Communications (Cat. No. 99CH36311), Vancouver, BC, Canada, 6–10 June 1999; pp. 891–895. [Google Scholar]
- Moayedi, H.Z.; Masnadi-Shirazi, M.A. Arima model for network traffic prediction and anomaly detection. In Proceedings of the International Symposium on Information Technology, Kuala Lumpur, Malaysia, 26–28 August 2008; pp. 1–6. [Google Scholar]
- Park, S.; Choi, D.; Bok, K.; Yoo, J. Speed Prediction Scheme Using Traffic Information in Target and Neighboring Roads. In Proceedings of the Korea Computer Congress, Jeju, Korea, 26–28 June 2019; pp. 142–144. [Google Scholar]
- Mikolov, T.; Karafiát, M.; Burget, L.; Černocký, J.; Khudanpur, S. Recurrent neural network based language model. In Proceedings of the Eleventh Annual Conference of the International Speech Communication Association, Makuhari, Chiba, Japan, 26–30 September 2010. [Google Scholar]
- Svozil, D.; Kvasnicka, V.; Pospichal, J. Introduction to multi-layer feed-forward neural networks. Chemom. Intell. Lab. Syst. 1997, 39, 43–62. [Google Scholar] [CrossRef]
- Jensen, F.V. An Introduction to Bayesian Networks; UCL Press: London, UK, 1996. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Processing Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Zhou, C.; Nelson, P.C. Predicting traffic congestion using recurrent neural networks. In Proceedings of the 9th World Congress on Intelligent Transport Systems ITS America, ITS Japan, ERTICO (Intelligent Transport Systems and Services-Europe), Washington, DC, USA, 14–17 October 2002. [Google Scholar]
- Chen, X.; Chen, H.; Yang, Y.; Wu, H.; Zhang, W.; Zhao, J.; Xiong, Y. Traffic flow prediction by an ensemble framework with data denoising and deep learning model. Phys. A Stat. Mech. Appl. 2021, 565, 125574. [Google Scholar] [CrossRef]
- Xing, Y.; Lv, C.; Cao, D. Personalized Vehicle Trajectory Prediction Based on Joint Time-Series Modeling for Connected Vehicles. IEEE Trans. Veh. Technol. 2019, 69, 1341–1352. [Google Scholar] [CrossRef]
- Pandas Documentation. Available online: https://pandas.pydata.org/pandas-docs/stable/ (accessed on 24 August 2021).
- Zaremba, W.; Sutskever, I.; Vinyals, O. Recurrent neural network regularization. arXiv 2014, arXiv:1409.2329. [Google Scholar]
- Keras. Available online: https://keras.io/ (accessed on 24 August 2021).























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| t | 0.214334 | 0.870698 | 0.905612 | 0.848839 | 0.851250 |
| t + 1 | 0.239343 | 0.866772 | 0.907388 | 0.855186 | 0.845409 |
| t + 2 | 0.0 | 0.862847 | 0.909164 | 0.861533 | 0.839569 |
| t + 3 | 0.0 | 0.906615 | 0.917066 | 0.910139 | 0.877798 |
| t + 4 | 0.0 | 0.880805 | 0.910407 | 0.865375 | 0.829195 |
| t + 5 | 0.0 | 0.851535 | 0.942584 | 0.845357 | 0.842598 |
| t + 6 | 0.0 | 0.902145 | 0.920457 | 0.864527 | 0.864215 |
| t + 7 | 0.0 | 0.894255 | 0.901565 | 0.902145 | 0.854112 |
| t + 8 | 0.0 | 0.904232 | 0.920545 | 0.901565 | 0.945515 |
| t | 0.214334 | 0.870698 | 0.905612 | 0.848839 | 0.851250 | 0.864215 |
| t + 1 | 0.239343 | 0.866772 | 0.907388 | 0.855186 | 0.845409 | 0.854112 |
| t + 2 | 0.0 | 0.862847 | 0.909164 | 0.861533 | 0.839569 | 0.945515 |
| t + 3 | 0.0 | 0.906615 | 0.917066 | 0.910139 | 0.877798 | 0.934532 |
| t + 4 | 0.0 | 0.880805 | 0.910407 | 0.865375 | 0.829195 | 0.928745 |
| t + 5 | 0.0 | 0.851535 | 0.942584 | 0.845357 | 0.842598 | 0.843523 |
| t + 6 | 0.0 | 0.902145 | 0.920457 | 0.864527 | 0.864215 | 0.874353 |
| t + 7 | 0.0 | 0.894255 | 0.901565 | 0.902145 | 0.854112 | 0.892345 |
| t + 8 | 0.0 | 0.904232 | 0.920545 | 0.901565 | 0.945515 | 0.902343 |
| 6 | 0.8 |
| 7 | 0.7 |
| 8 | 0.6 |
| 9 | 0.5 |
| 10 | 0.4 |
| 11 | 0.3 |
| 12 | 0.2 |
| 13 | 0.1 |
| Category | Description |
|---|---|
| Processor | Intel(R) Core(TM) i5-4440K 3.10 GHz 4 Core |
| Memory | 8.0 GB |
| Operating system | Windows 10 |
| Language used | Python 3 |
| Platform used | Python 3.5.6 Anaconda custom |
| Category | Collection Period | Size |
|---|---|---|
| Training dataset | 24 June 202–1 September 2020 | 20,160 cases |
| Prediction dataset | 2 September 2020–6 October 2020 | 10,080 cases |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lim, J.; Park, S.; Choi, D.; Bok, K.; Yoo, J. Road Speed Prediction Scheme by Analyzing Road Environment Data. Sensors 2022, 22, 2606. https://doi.org/10.3390/s22072606
Lim J, Park S, Choi D, Bok K, Yoo J. Road Speed Prediction Scheme by Analyzing Road Environment Data. Sensors. 2022; 22(7):2606. https://doi.org/10.3390/s22072606
Chicago/Turabian StyleLim, Jongtae, Songhee Park, Dojin Choi, Kyoungsoo Bok, and Jaesoo Yoo. 2022. "Road Speed Prediction Scheme by Analyzing Road Environment Data" Sensors 22, no. 7: 2606. https://doi.org/10.3390/s22072606