
Single-Shot Intrinsic Calibration for Autonomous Driving Applications


Abstract
:1. Introduction
- The obtention of the minimum practical number of checkerboard poses to calculate the camera projection parameters for 3D applications accurately.
- The definition of guidelines for checkerboards’ position and rotation w.r.t. to the camera to estimate accurate camera intrinsic parameters.
- Validation of this single-image calibration setup in the real world with different cameras, lenses, and focal lengths, thus accelerating the camera calibration process.
- Release of the source code and the synthetic images to facilitate the practical application and reproduction of these guidelines in the real world.
2. Related Work
3. Methods
3.1. Real-World Camera Baseline
3.1.1. Baseline Calibration
3.2. Simulation
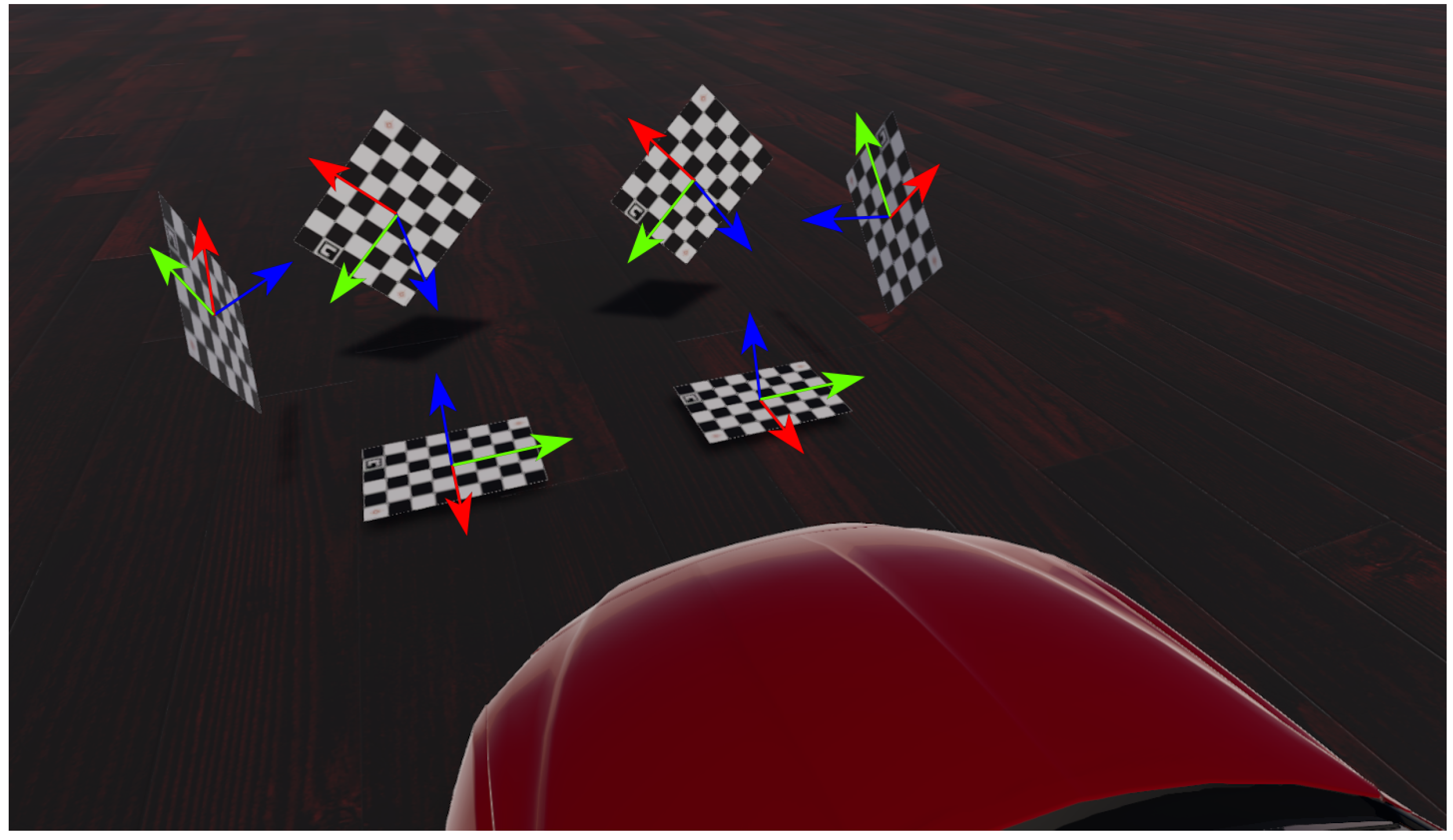
3.3. Checkerboard Coordinate System
3.4. Simulator Coordinate System
3.5. Checkerboard Corner Detector Evaluation
3.5.1. Corner Detector Metrics
- Ground Truth 3D corners are the N three-dimensional points in camera space, where , and u and v are the number of inner rows and columns of the checkerboard, respectively.
- Corner RMSE is calculated between the true 2D corners in distorted images generated by the simulator, and the corners computed when running the corner detection , and calculated as:The true 2D corners are obtained by projecting the true 3D corners as: , where is the optimized projection matrix from 3D camera space to 2D image space after applying distortion correction, and defined as: . Translation and rotation are not required in this case because the corners points in are already in camera space.
- Inner Checkerboard Area is calculated by obtaining the area of the two triangles formed by the corners in the checkerboard. Area calculation would be exact in an undistorted image, but is not precise in a distorted one. For this reason, we use two triangles to estimate the area, since we propose that this produces better results than using a parallelogram.
- Checkerboard-Image Plane Angle is defined as the angle between the checkerboard plane normal (as defined by the corners) and the image plane normal (camera z-axis).
3.5.2. Experiments
3.5.3. Results
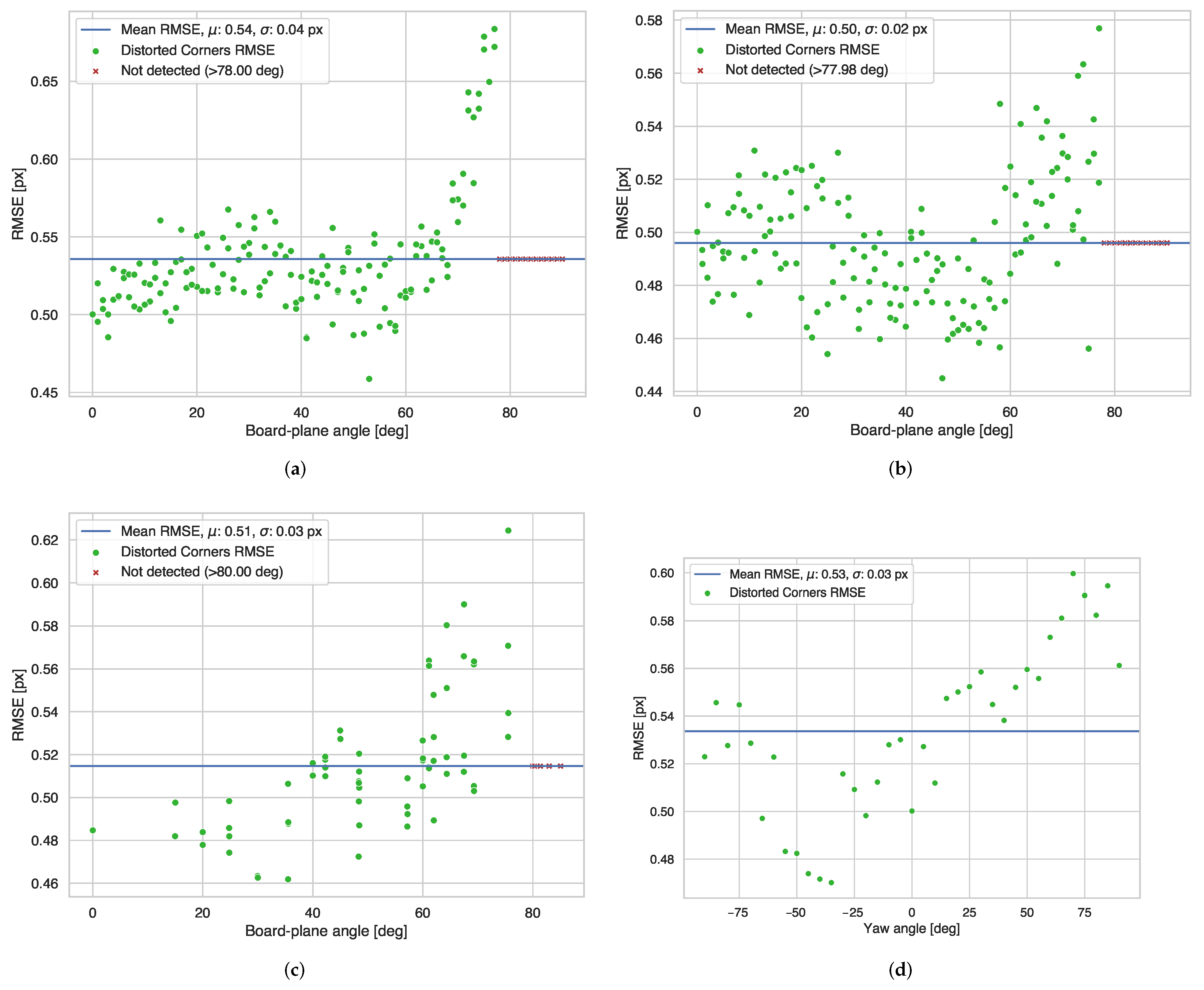
- We found that the corner detector peak performance with respect to roll rotation between the camera plane normal and the checkerboard normal is between 0 and 60 degrees, as we present in Figure 2a. Rotations below 70 degrees can obtain reliable corner detections, but we can see that the performance quickly decreases at angles larger than 70 degrees, and the detector completely fails for angles larger than 78 degrees.
- We observed in Figure 2b that the corner detector performs best between 20 and 60 degrees when varying the pitch angle between the camera plane normal and the checkerboard normal. The performance degrades at angles larger than 60 degrees, until it cannot detect any corners at all after 78 degrees.
- From Figure 2c, we can appreciate that the corner detector performs best between 20 and 60 degrees when simultaneously varying the pitch and roll between the camera plane normal and the checkerboard normal. Similarly, we see a reduction in accuracy when the rotations surpass 78 degrees.
- From Figure 3a we can see that the corner detector can detect corners reliably up to 35 m, and trivially confirm that corner detector RMSE increases with distance; however, Figure 3b only shows a pronounced drop after 10 m. With the intention of including multiple checkerboards per frame, we can suggest placing the checkerboards within 10 m from the camera or ensure that the checkerboard’s visible inner area should be at least 20,000 . This value for the area is resolution independent, so we propose it as a guideline for perspective cameras and lenses that produce a different field of view.
3.6. Simulated Calibration Experiments
3.6.1. Checkerboard Pose Metrics
- Focal length (,).
- Center point (,).
- Distortion coefficients: three radial (,,), and two tangential (,).
- The RMSE between the ground truth corner positions and the projected corner points using the estimated intrinsic parameters.
- The checkerboard corner re-projection error, which is the distance between the detected corners in a calibration image, and the corresponding 3D corner points projected into the same image.
- The Control Points re-projection error, which is the distance between the projections of a 3D Control Point when using the estimated and the ground truth intrinsic parameters. In Section 3.6.2, we introduce and describe the “Control Points” in more detail.
3.6.2. Control Points
3.6.3. Dual Checkerboard Calibration
- The rotation angles (Section 3.6.4).
- The vertical and horizontal checkerboard positioning (Section 3.6.5 and Section 3.6.6).
- The distance between the camera and the checkerboard (Section 3.6.7).
- The number of checkerboards or poses (Section 3.6.9).
3.6.4. Dual Checkerboard Rotation Experiments
3.6.5. Dual Checkerboard Horizontal Positioning Experiments
3.6.6. Dual Checkerboard Vertical Positioning Experiments
3.6.7. Dual Checkerboard Distance Experiments
3.6.8. Dual Checkerboard Calibration Results
- 1.
- 2.
- Having a single checkerboard pointing directly to the camera while the other is rotated seems to produce better overall parameters. We hypothesize that this dual checkerboard combination provides enough information to estimate the center point and the focal length accurately, while also producing sufficient data to calculate the distortion parameters.
- 3.
- Keeping the checkerboard rotation inside the [, ] interval, as we defined in Section 3.5.3, is essential to increase the corner detection accuracy.
- 4.
- Checkerboards located on the image corners are not required, as long as the user can position the checkerboards near the image edge.
- 5.
- Checkerboards with varied rotation relative to the camera plane are more beneficial than those located farther away, since closer checkerboards produce more accurate corners. We found this to be true because rotated checkerboards near the acceptable rotation limits also provide scale variations.
3.6.9. Multiple Checkerboards Calibration
3.6.10. Multiple Checkerboards Calibration Results
4. Results
4.1. Real-World Calibration Verification
4.2. Multiple Checkerboard Verification Experiments
5. Discussion
Real-World Calibration Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| LiDAR | Light Detection and Ranging |
| SLAM | Simultaneous Localization and Mapping |
| ROS | Robot Operating Systems |
| ToF | Time-of-Flight |
References
- Vora, S.; Lang, A.H.; Helou, B.; Beijbom, O. PointPainting: Sequential Fusion for 3D Object Detection. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 4603–4611. [Google Scholar] [CrossRef]
- Ku, J.; Mozifian, M.; Lee, J.; Harakeh, A.; Waslander, S.L. Joint 3D Proposal Generation and Object Detection from View Aggregation. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 1–8. [Google Scholar] [CrossRef] [Green Version]
- Qi, C.R.; Liu, W.; Wu, C.; Su, H.; Guibas, L.J. Frustum PointNets for 3D Object Detection from RGB-D Data. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 918–927. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Ma, H.; Wan, J.; Li, B.; Xia, T. Multi-view 3D Object Detection Network for Autonomous Driving. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 6526–6534. [Google Scholar] [CrossRef] [Green Version]
- Caselitz, T.; Steder, B.; Ruhnke, M.; Burgard, W. Monocular camera localization in 3D LiDAR maps. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 1926–1931. [Google Scholar] [CrossRef]
- Wolcott, R.W.; Eustice, R.M. Visual localization within LIDAR maps for automated urban driving. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 176–183. [Google Scholar] [CrossRef] [Green Version]
- Muñoz-Bulnes, J.; Fernandez, C.; Parra, I.; Fernández-Llorca, D.; Sotelo, M.A. Deep fully convolutional networks with random data augmentation for enhanced generalization in road detection. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 366–371. [Google Scholar] [CrossRef]
- Mikołajczyk, A.; Grochowski, M. Data augmentation for improving deep learning in image classification problem. In Proceedings of the 2018 International Interdisciplinary PhD Workshop (IIPhDW), Swinoujscie, Poland, 9–12 May 2018; pp. 117–122. [Google Scholar] [CrossRef]
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision, 2nd ed.; Cambridge University Press: New York, NY, USA, 2003. [Google Scholar]
- Zhang, Z. Camera calibration with one-dimensional objects. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 892–899. [Google Scholar] [CrossRef]
- Remondino, F.; Fraser, C. Digital camera calibration methods: Considerations and comparisons. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2005, 36, 266–272. [Google Scholar]
- Ricolfe-Viala, C.; Esparza, A. The Influence of Autofocus Lenses in the Camera Calibration Process. IEEE Trans. Instrum. Meas. 2021, 70, 1–15. [Google Scholar] [CrossRef]
- The Mathworks, I. Evaluating the Accuracy of Single Camera Calibration. 2021. Available online: https://www.mathworks.com/help/vision/ug/evaluating-the-accuracy-of-single-camera-calibration.html (accessed on 29 January 2022).
- Abeles, P. BoofCV. 2011–2021. Available online: http://boofcv.org/ (accessed on 29 January 2022).
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef] [Green Version]
- Kannala, J.; Brandt, S. A generic camera model and calibration method for conventional, wide-angle, and fish-eye lenses. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 1335–1340. [Google Scholar] [CrossRef] [Green Version]
- Heikkila, J.; Silven, O. A four-step camera calibration procedure with implicit image correction. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Juan, PR, USA, 17–19 June 1997; pp. 1106–1112. [Google Scholar] [CrossRef] [Green Version]
- Bradski, G. Open Source Computer Vision Library. In Dr. Dobb’s Journal of Software Tools; 2000; Available online: https://github.com/opencv/opencv/wiki/CiteOpenCV (accessed on 29 January 2022).
- The Mathworks, Inc. MATLAB Version (R2021a); The Mathworks, Inc.: Natick, MA, USA, 2021. [Google Scholar]
- Bogdan, O.; Eckstein, V.; Rameau, F.; Bazin, J.C. DeepCalib: A deep learning approach for automatic intrinsic calibration of wide field-of-view cameras. In Proceedings of the 15th ACM SIGGRAPH European Conference on Visual Media Production, London, UK, 13–14 December 2018. [Google Scholar]
- Hold-Geoffroy, Y.; Sunkavalli, K.; Eisenmann, J.; Fisher, M.; Gambaretto, E.; Hadap, S.; Lalonde, J.F. A Perceptual Measure for Deep Single Image Camera Calibration. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 2354–2363. [Google Scholar] [CrossRef] [Green Version]
- Vasconcelos, F.; Barreto, J.P.; Nunes, U. A Minimal Solution for the Extrinsic Calibration of a Camera and a Laser-Rangefinder. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2097–2107. [Google Scholar] [CrossRef]
- Pusztai, Z.; Hajder, L. Accurate Calibration of LiDAR-Camera Systems Using Ordinary Boxes. In Proceedings of the 2017 IEEE International Conference on Computer Vision Workshops (ICCVW), Venice, Italy, 22–29 October 2017; pp. 394–402. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Sakurada, K.; Kawaguchi, N. Reflectance Intensity Assisted Automatic and Accurate Extrinsic Calibration of 3D LiDAR and Panoramic Camera Using a Printed Chessboard. Remote Sens. 2017, 9, 851. [Google Scholar] [CrossRef] [Green Version]
- Zhou, L.; Li, Z.; Kaess, M. Automatic Extrinsic Calibration of a Camera and a 3D LiDAR Using Line and Plane Correspondences. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 5562–5569. [Google Scholar] [CrossRef]
- Domhof, J.; Kooij, J.F.; Gavrila, D.M. An Extrinsic Calibration Tool for Radar, Camera and Lidar. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 8107–8113. [Google Scholar] [CrossRef] [Green Version]
- Huang, J.K.; Grizzle, J.W. Improvements to Target-Based 3D LiDAR to Camera Calibration. IEEE Access 2020, 8, 134101–134110. [Google Scholar] [CrossRef]
- Basso, F.; Menegatti, E.; Pretto, A. Robust Intrinsic and Extrinsic Calibration of RGB-D Cameras. IEEE Trans. Robot. 2018, 34, 1315–1332. [Google Scholar] [CrossRef] [Green Version]
- Geiger, A.; Moosmann, F.; Car, O.; Schuster, B. Automatic camera and range sensor calibration using a single shot. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, St Paul, MN, USA, 14–18 May 2012; pp. 3936–3943. [Google Scholar] [CrossRef]
- Guiming, S.; Jidong, S. Multi-Scale Harris Corner Detection Algorithm Based on Canny Edge-Detection. In Proceedings of the 2018 IEEE International Conference on Computer and Communication Engineering Technology (CCET), Beijing, China, 18–20 August 2018; pp. 305–309. [Google Scholar] [CrossRef]
- Ha, J.E. Automatic detection of chessboard and its applications. Opt. Eng. 2009, 48, 067205. [Google Scholar] [CrossRef]
- Harris, C.; Stephens, M. A combined corner and edge detector. In Proceedings of the Fourth Alvey Vision Conference, Manchester, UK, 31 August–2 September 1988; pp. 147–151. [Google Scholar]
- Shi, J. Tomasi. Good features to track. In Proceedings of the 1994 Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 21–23 June 1994; pp. 593–600. [Google Scholar] [CrossRef]
- Bouguet, J.Y. A Release of a Camera Calibration Toolbox for Matlab; 2008. Available online: http://www.vision.caltech.edu/bouguetj/calib_doc/ (accessed on 29 January 2022).
- Community, B.O. Blender—A 3D Modelling and Rendering Package; Blender Foundation, Stichting Blender Foundation: Amsterdam, The Netherlands, 2018. [Google Scholar]
- Rong, G.; Shin, B.H.; Tabatabaee, H.; Lu, Q.; Lemke, S.; Možeiko, M.; Boise, E.; Uhm, G.; Gerow, M.; Mehta, S.; et al. LGSVL Simulator: A High Fidelity Simulator for Autonomous Driving. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Abraham, S.; Hau, T. Towards autonomous high-precision calibration of digital cameras. Proc. SPIE 1997, 3174, 82–93. [Google Scholar]
- Rosten, E.; Loveland, R. Camera distortion self-calibration using the plumb-line constraint and minimal Hough entropy. Mach. Vis. Appl. 2011, 22, 77–85. [Google Scholar] [CrossRef] [Green Version]
- Stanford Artificial Intelligence Laboratory. Robotic Operating System; ICRA Workshop on Open Source Software; Stanford Artificial Intelligence Laboratory: Stanford, CA, USA, 2009. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment | Left Checkerboard Parameters | Right Checkerboard Parameters | Top 2% Poses, Its Control Points, and Corners Re-Projection Error () [px] |
|---|---|---|---|
| A1 Left Fixed Right Rotate | : (−0.6, 1.0, 5.0) m : 0° : 0° : −53.14° | : (0.6, 1.0, 5.0) m : [−60, 60, 10]° : [−60, 60, 10]° : −53.14° | (#98) : 10°, : 10°, : 1.807, : 0.1543 (#72) : −10°, : 10°, : 1.8260, : 0.1484 (#110) : 20°, : 0°, : 1.8867, : 0.1611 (#30) : −40°, : −20°, : 1.8930, : 0.1605 |
| A2 Left Rotate Right Fixed | : (−0.6, 1.0, 5.0) m : [−60, 60, 10]° : [−60, 60, 10]° : −53.14° | : (0.6, 1.0, 5.0) m : 0° : 0° : −53.14° | (#52) : −20°, : −60°, : 1.1576, : 0.1686 (#132) : 40°, : −40°, : 1.2514, : 0.1685 (#94) : 10°, : −30°, : 1.3005, : 0.1674 (#92) : 10°, : −50°, : 1.3379, : 0.1507 |
| A3 Left Rotate Right Rotate | : (−0.6, 1.0, 5.0) m : [−60, 60, 10]° : [−60, 60, 10]° : −53.14° | : (0.6, 1.0, 5.0) m : [−60, 60, 10]° : [−60, 60, 10]° : −53.14° | (#132) : 40°, : −40°, : 40°, : −40°, : 1.5329, : 0.1915 (#58) : −20°, : 0°, : −20°, : 0°, : 1.6313, : 0.1535 (#157) : 60°, : −50°, : 60°, : 50°, : 1.8264, : 0.1928 (#36) : −40°, : 40°, : −40°, : 30°, : 1.8902, : 0.1752 |
| A4 Left Rotate Right Rotate Mirror Yaw | : (−0.6, 1.0, 5.0) m : [−60, 60, 10]° : [−60, 60, 10]° : 53.14° | : (0.6, 1.0, 5.0) m : [−60, 60, 10]° : [−60, 60, 10]° : −53.14° | (#28) : −40°, : −40°, : −40°, : −40°, : 1.5135, : 0.17 (#98) : 10°, : 10°, : 10°, : 10°, : 1.6489, : 0.1634 (#73) : −10°, : 20°, : −10°, : 20°, : 1.9723, : 0.1635 (#68) : −10°, : −30°, : −10°, : −30°, : 2.1704, : 0.1579 |
| A5 Left Rotate Right Rotate Mirror Roll/Pitch | : (−0.6, 1.0, 5.0) m : [−60, 60, 10]° : [−60, 60, 10]° : 53.14° | : (0.6, 1.0, 5.0) m : [60, −60, −10]° : [60, −60, −10]° : −53.14° | (#74) : −10°, : 30°, : 10°, : 30°,: 1.7785, : 0.1658 (#73) : −10°, : 20°, : 10°, : 20°,: 1.7820, : 0.1602 (#21) : −50°, : 20°, : 50°, : 20°, : 1.7852, : 0.1853 (#93) : 10°, : −40°, : −10°, : 40°,: 2.0763, : 0.1585 |
| Experiment | Left Checkerboard Parameters | Right Checkerboard Parameters | Top 2% Poses, Its Control Points, and Corners Re-Projection Error () [px] |
|---|---|---|---|
| H1 Left Perpendicular Horizontally Together | : (0, 0, −53.14)° x: [−1.2, 0.4, 0.02] m y: 1.0 m z: 5.0 m | : (−40, −20, −53.14)° x: [−0.3, 1.3 0.02] m y: 1.0 m z: 5.0 m | (#74) : 0.28 m, : 1.18 m, : 1.0277, : 0.1751 (#78) : 0.36 m, : 1.26 m, : 1.0783, : 0.1739 (#15) : −0.89 m, : 0.0 m, : 1.3312, : 0.1227 (#5) : −1.10 m, : −0.02 m, : 1.3568, : 0.1268 |
| H2 Left/Right Mirrored Horizontally Together | : (50, −20, −53.14)° x: [−1.2, 1.3, 0.2] m y: 1.0 m z: 5.0 m | : (−50, 20, −53.14)° x: [−0.3, 0.4, 0.02] m y: 1.0 m z: 5.0 m | (#14) : −0.92 m, : −0.2 m, : 1.1834, : 0.144 (#75) : 0.3 m, : −1.2 m, : 2.0962, : 0.1826 (#17) : −0.86 m, : 0.04 m, : 2.1201, : 0.1440 (#18) : −0.84 m, : 0.06 m, : 2.1817, : 0.1488 |
| H3 Left Perpendicular Horizontally Separate | : (0, 0, −53.14)° x: [−0.4, −1.2, −0.01] m y: 1.0 m z: 5.0 m | : (−40, −20, −53.14)° x: [0.4, 1.2, 0.01] m y: 1.0 m z: 5.0 m | (#74) : −1.14 m, : 1.14 m, : 1.0383, : 0.1465 (#65) : −1.05 m, : 1.05 m, : 1.0566, : 0.1714 (#73) : −1.13 m, : 1.13 m, : 1.0842, : 0.1405 (#78) : −1.18 m, : 1.18 m, : 1.1105, : 0.1781 |
| H4 Left/Right Mirrored Horizontally Separate | : (50, −20, −53.14)° x: [−0.4, −1.2, −0.01] m y: 1.0 m z: 5.0 m | : (−50, 20, −53.14)° x: [0.4, 1.2, 0.01] m y: 1.0 m z: 5.0 m | (#20) : −0.6 m, : 0.6 m, : 1.7851, : 0.1853 (#43) : −0.83 m, : 0.83 m, : 1.9118, : 0.2020 (#54) : −0.94 m, : 0.94 m, : 1.9452, : 0.2076 (#31) : −0.71 m, : 0.71 m, : 2.0131, : 0.1901 |
| H5 Left/Right Mirrored Inverted Horizontally Separate | : (−50, 20, −53.14)° x: [−0.4, 1.2, 0.01] m y: 1.0 m z: 5.0 m | : (50, −20, −53.14)° x: [0.4,−1.2, 0.01] m y: 1.0 m z: 5.0 m | (#6) : −0.92 m, : −0.2 m, : 4.084, : 0.2147 (#14) : 0.3 m, : −1.2 m, : 4.7277, : 0.2521 (#13) : −0.86 m, : 0.04 m, : 4.7709, : 0.2238 (#23) : −0.84 m, : 0.06 m, : 5.43005, : 0.2391 |
| V1 Left/Right Identical Rotations Vertically Together | : (−40, −20, −53.14)° x: −1.13 m y: [0.35, 1.65, 0.02] m z: 5.0 m | : (−40, −20, −53.14)° x: 1.13 m y: [0.35, 1.65, 0.02] m z: 5.0 m | (#42) : 1.19 m, : 1.19 m, : 0.6763, : 0.1595 (#37) : 1.09 m, : 1.09 m, : 0.7285, : 0.1654 (#55) : 1.45 m, : 1.45 m, : 0.7542, : 0.1459 (#57) : 1.49 m, : 1.49 m, : 0.8238, : 0.1568 |
| V2 Left/Right Identical Rotations Vertically Opposite | : (−40, −20, −53.14)° x: −1.13 m y: [1.65, 0.35, −0.02] m z: 5.0 m | : (−40, −20, −53.14)° x: 1.13 m y: [0.35, 1.65, 0.02] m z: 5.0 m | (#34) : 0.97m, : 1.03 m, : 0.8916, : 0.1508 (#46) : 0.73 m, : 1.27 m, : 0.9385, : 0.1476 (#37) : 0.91 m, : 1.09 m, : 1.0684, : 0.1491 (#64) : 0.37 m, : 1.63 m, : 1.1009, : 0.1516 |
| Experiment | Left CheckerboardParameters | Right CheckerboardParameters | Top 2% Poses, Its Control Points, and Corners Re−Projection Error () [px] |
|---|---|---|---|
| D1 Left Fixed/>Right Approach | : (−40, −20, −53.14)° x: −1.13 m y: 1.0 m z: 5.0 m | : (−40, −20, −53.14)° x: 1.13 m y: 1.0 m z: [10.0, 4.6, −0.1] m | (#32) : 6.8 m, : 1.2415, : 0.1671 (#43) : 5.7 m, : 1.4161, : 0.1646 (#52) : 4.8 m, : 1.4630, : 0.1638 (#54) : 4.6 m, : 1.4680, : 0.1489 |
| D2 Left/Right Approach | : (−40, −20, −53.14)° x: −1.13 m y: 1.0 m z: [10.0, 4.6, −0.1] | : (−40, −20, −53.14)° x: 1.13 m y: 1.0 m z: [10.0, 4.6, −0.1] | (#49) : 5.1 m, : 5.1 m, : 1.3418, : 0.1898 (#30) : 7.0 m, : 7.0 m, : 1.5207, : 0.1872 (#50) : 5.0 m, : 5.0 m, : 1.5672, : 0.1541 (#46) : 5.4 m, : 5.4 m, : 1.5840, : 0.2177 |
| Experiment (xyz),(rpy) | Image | Experiment (xyz),(rpy) | Image |
|---|---|---|---|
| Three Checkerboards (−0.05, 1.0, 4) m, (0, 0, −53.14)° (1.05, 1.4, 4.9) m, (10.07, 51.04, 40.53)° (−1.35, 0.65, 5.6) m, (34.04, −27.33, −35.99)° |  | Three Checkerboards (−0.05, 1, 4) m, (0, 0, −53.14)° (1.05, 1.4, 4.9) m, (36.84, 42.16, −62.15)° (−1.35, 0.65, 5.6) m, (−33.57, 18.33, −6.1)° |  |
| Four Checkerboards (−0.45, 1.5, 5) m, (4.44, −14.28, −64.04)° (0.3, 0.7, 4.5) m, (−11.53, −38.45, −60.02)° (1.05, 1.4, 4.8) m, (10.07, 51.04, 40.53)° (−1.35, 0.65, 5.6) m, (34.04, −27.33, −35.99)° |  | Four Checkerboards (−0.45, 1.5, 5.0) m, (−11.53, −38.45, −60.02)° (0.3, 0.7, 4.5) m, (0, 0, −53.14)° (1.05, 1.4, 4.8) m, (10.07, 51.04, 40.53)° (−1.35, 0.65, 5.6) m, (34.04, −27.33, −35.99)° |  |
| Five Checkerboards (0.05, 1, 4.1) m, (0, 0, −53.14)° (0.95, 1.6, 4.6) m, (−40.17, −20.68, −1.58)° (0.95, 0.65, 4.6) m, (10.07, 51.04, 40.53)° (−0.95, 1.5, 4.8) m, (−11.53, −38.45, −60.02)° (−0.75, 0.6, 4.3) m, (34.04, −27.33, −35.99)° |  | Five Checkerboards (0.05, 1, 4.3) m, (0, 0, −53.14)° (0.95, 1.6, 4.8) m, (−40.17, −20.68, −1.58)° (0.95, 0.65, 4.8) m, (10.07, 51.04, 40.53)° (−0.95, 1.5, 5) m, (−11.53, −38.45, −60.02)° (−0.75, 0.6, 4.5) m, (34.04, −27.33, −35.99)° |  |
| Six Checkerboards (−0.05, 1.4, 4.4) m, (0, 0, −53.14)° (0.1, 0.6, 4.2) m, (−36.16, −43.53, −61.14)° (0.95, 1.6, 4.6) m, (20.17, −20.68, −1.58)° (0.95, 0.65, 4.6) m, (10.07, 51.04, 40.53)° (−0.95, 1.5, 4.7) m, (−11.53, −38.45, −60.02)° (−0.75, 0.6, 4.3) m, (34.04, −27.33, −35.99)° |  | Seven Checkerboards (−0.05, 1.7, 4.9) m, (−36.16, −43.53, 10.14)° (0.15, 1.0, 5.2) m, (0, 0, −53.14)° (0.1, 0.4, 4.7) m, (64.74, 8.31, −24.57)° (0.95, 1.6, 4.5) m, (20.17, −20.68, −1.58)° (0.95, 0.65, 4.5) m, (10.07, 51.04, 40.53)° (−0.95, 1.5, 4.7) m, (−11.53, −38.45, −60.02)° (−0.75, 0.6, 4.3) m, (34.04, −27.33, −35.99)° |  |
| Eight Checkerboards (−1.15, 1.1, 5) m, (−11.53, −38.45, −60.02)° (−0.5, 1.7, 4.9) m, (−36.16, −43.53, 10.14)° (−0.6, 0.4, 5) m, (34.04, −27.33, −35.99)° (−0.35, 1.0, 5.4) m, (0, 0, −53.14)° (0.55, 0.95, 5) m, (40.93, 38.59, 36.58)° (0.5, 0.5, 4.4) m, (64.74, 8.31, 24.57)° (0.55, 1.59, 4.5) m, (20.17, −20.68, −1.58)° (1.35, 0.98, 5.05) m, (10.07, 51.04, 89.53)° |  | Nine Checkerboards (−1.37, 0.9, 5.1) m, (−11.53, −58.45, −80.02)° (−0.8, 1.7, 4.9) m, (−36.16, −43.53, 10.14)° (−0.6, 0.4, 5.0) m, (34.04, −27.33, −35.99)° (−0.53, 1.08, 4.8) m, (−20.84, 26.11, −4.00)° (0.03, 1.65, 5.2) m, (0, 0, −53.14)° (0.4, 0.98, 4.65) m, (40.93, 38.59, 36.58)° (0.5, 0.5, 4.4) m, (64.74, 8.31, 24.57)° (0.75, 1.59, 4.5) m, (20.17, −20.68, −1.58)° (1.35, 0.98, 5.05) m, (10.07, 51.04, 89.53)° |  |
| Ten Checkerboards (−1.41, 1.05, 5.2) m, (−11.53, −58.45, −80.02)° (−0.8, 1.75, 5.0) m, (−36.16, −43.53, 10.14)° (−1.06, 0.32, 5.1) m, (39.04, −37.33, −15.99)° (−0.48, 1.0, 4.4) m, (−20.84, 26.11, −4.00)° (0.03, 1.65, 5.2) m, (0, 0, −53.14)° (0.4, 0.98, 4.65) m, (30.93, 28.59, 36.58)° (0.9, 0.4, 4.7) m, (64.74, 8.31, 24.57)° (0.89, 1.69, 4.9) m, (20.17, −20.68, −1.58)° (1.40, 0.95, 5.2) m, (10.07, 51.04, 89.53)° (−0.06, 0.3, 4.95) m, (64.74, 8.31, −24.57)° |  | ||
| Six Checkerboards (0.05, 1.5, 5.1) m, (0, 0, −53.14)° (0.05, 0.30, 5.2) m, (10, −5, 0)° (−1.18, 1.3, 4.9) m, (9.23, −4.70, −1.58)° (1.18, 1.3, 5.1) m, (−4.72, 23.40, −15.88)° (1.29, 0.24, 5.2) m, (63.74, 18.31, −12.57)° (−1.38, 0.32, 5.3) m, (−22.92, −58.33, 5.44)° |  | Seven Checkerboards (0.05, 1.90, 5.5) m, (0, 5, 0)° (0.05, 1.05, 5.4) m, (0, 0, −53.14)° (0.05, 0.28, 5.0) m, (10, −5, 0)° (−1.18, 1.3, 4.9) m, (9.23, −4.70, −1.58)° (1.18, 1.3, 5.1) m, (−4.72, 23.40, −15.88)° (1.29, 0.24, 5.2) m, (63.74, 18.31, −12.57)° (−1.38, 0.32, 5.3) m, (−22.92, −58.33, 5.44)° |  |
| Experiment | Distorted Corners RMSE [px] | Undistorted Corners RMSE [px] | Control Points RMSE [px] | Focal Length Error [px] | Center PointError [px] | DistortionError |
|---|---|---|---|---|---|---|
| Ten Checkerboards | 0.526 | 0.671 | 0.787 | 1.48 | 7.40 | 0.033 |
| Nine Checkerboards | 0.515 | 0.830 | 0.888 | 8.344 | 9.91 | 0.076 |
| Eight Checkerboards | 0.519 | 0.708 | 1.01 | 1.58 | 9.47 | 0.025 |
| Seven Checkerboards | 0.521 | 0.672 | 0.776 | 4.945 | 4.13 | 0.011 |
| Six Checkerboards | 0.521 | 0.778 | 0.971 | 7.62 | 6.45 | 0.050 |
| Five Checkerboards | 0.494 | 0.947 | 1.22 | 3.89 | 11.5 | 0.065 |
| Five Checkerboards | 0.507 | 0.798 | 0.941 | 8.59 | 6.45 | 0.101 |
| Four Checkerboards | 0.522 | 0.867 | 0.974 | 4.68 | 11.8 | 0.018 |
| Four Checkerboards | 0.537 | 1.13 | 1.32 | 4.09 | 16.8 | 0.075 |
| Three Checkerboards | 0.524 | 0.651 | 0.693 | 32.5 | 21.4 | 0.0803 |
| Three Checkerboards | 0.508 | 0.762 | 0.808 | 9.79 | 1.72 | 0.0232 |
| Six Checkerboards | 0.512 | 0.628 | 0.628 | 6.97 | 3.26 | 0.0092 |
| Seven Checkerboards | 0.512 | 0.871 | 0.985 | 5.61 | 10.65 | 0.007 |
| Camera | Resolution | Sensor Size | Focal Length | HFOV |
|---|---|---|---|---|
| Lucid | 2880 × 1860 (5.4 MP) | 10.36 mm | 8 mm | |
| Lucid | 2880 × 1860 (5.4 MP) | 10.36 mm | 25 mm | |
| FLIR | 1920 × 1260 (2.3 MP) | 13.4 mm | 8 mm |
| Experiment | x | y | z | roll | pitch | yaw |
|---|---|---|---|---|---|---|
| Lucid W | 0.031 | −0.14 | 0.03 | −1.515 | 0.005 | −1.628 |
| Lucid W | 0.031 | −0.14 | 0.03 | −1.474 | 0.01 | −1.625 |
| Lucid W | 0.031 | −0.14 | 0.05 | −1.513 | −0.01 | −1.619 |
| Lucid W | 0.031 | −0.12 | 0.05 | −1.51 | −0.01 | −1.623 |
| FLIR W | 0.031 | −0.14 | 0.03 | −1.5 | 0.005 | −1.564 |
| FLIR W | 0.031 | −0.14 | 0.03 | −1.48 | 0.005 | −1.564 |
| FLIR W | 0.031 | −0.14 | 0.03 | −1.5 | 0.005 | −1.564 |
| FLIR W | 0.031 | −0.12 | 0.03 | −1.504 | −0.02 | −1.563 |
| Lucid T | 0.05 | −0.14 | 0.031 | −1.588 | −0.05 | −1.509 |
| Lucid T | 0.05 | −0.14 | 0.031 | −1.559 | −0.049 | −1.521 |
| Lucid T | 0.05 | −0.14 | 0.031 | −1.553 | −0.045 | −1.517 |
| Lucid T | 0.05 | −0.15 | 0.031 | −1.548 | −0.05 | −1.515 |
| Experiment | Image |
|---|---|
| Lucid Six Checkerboards |  |
| Lucid Six Checkerboards |  |
| Lucid Seven Checkerboards |  |
| Lucid Seven Checkerboards |  |
| FLIR Six Checkerboards |  |
| FLIR Six Checkerboards |  |
| FLIR Seven Checkerboards |  |
| FLIR Seven Checkerboards |  |
| Experiment | Image |
|---|---|
| Lucid Six Checkerboards |  |
| Lucid Six Checkerboards |  |
| Lucid Seven Checkerboards |  |
| Lucid Seven Checkerboards |  |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Monrroy Cano, A.; Lambert, J.; Edahiro, M.; Kato, S. Single-Shot Intrinsic Calibration for Autonomous Driving Applications. Sensors 2022, 22, 2067. https://doi.org/10.3390/s22052067
Monrroy Cano A, Lambert J, Edahiro M, Kato S. Single-Shot Intrinsic Calibration for Autonomous Driving Applications. Sensors. 2022; 22(5):2067. https://doi.org/10.3390/s22052067
Chicago/Turabian StyleMonrroy Cano, Abraham, Jacob Lambert, Masato Edahiro, and Shinpei Kato. 2022. "Single-Shot Intrinsic Calibration for Autonomous Driving Applications" Sensors 22, no. 5: 2067. https://doi.org/10.3390/s22052067