
Integrated Timing of Stroking, Breathing, and Kicking in Front-Crawl Swimming: A Novel Stroke-by-Stroke Approach Using Wearable Inertial Sensors

 ,
, 
 ,
,  , , and
, , and 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Protocol: Participants, Trials and Instrumentation
2.2. Data Analysis
2.2.1. Stroking
2.2.2. Kicking
2.2.3. Breathing
2.2.4. Timing
2.2.5. Statistical Analysis
3. Results
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zamparo, P.; Cortesi, M.; Gatta, G. The Energy Cost of Swimming and Its Determinants. Eur. J. Appl. Physiol. 2020, 120, 41–66. [Google Scholar] [CrossRef] [PubMed]
- Seifert, L.; Carmigniani, R. Coordination and Stroking Parameters in the Four Swimming Techniques: A Narrative Review. Sports Biomech. 2021, 1–17. [Google Scholar] [CrossRef] [PubMed]
- Seifert, L.; Chollet, D.; Allard, P. Arm Coordination Symmetry and Breathing Effect in Front Crawl. Hum. Mov. Sci. 2005, 24, 234–256. [Google Scholar] [CrossRef]
- Cortesi, M.; Di Michele, R.; Fantozzi, S.; Bartolomei, S.; Gatta, G. Arm-Stroke Descriptor Variability during 200-m Front Crawl Swimming. Sensors 2021, 21, 324. [Google Scholar] [CrossRef]
- Seifert, L.; Chollet, D.; Chatard, J.C. Kinematic Changes during a 100-m Front Crawl: Effects of Performance Level and Gender. Med. Sci. Sports Exerc. 2007, 39, 1784–1793. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mooney, R.; Corley, G.; Godfrey, A.; Osborough, C.; Quinlan, L.R.; ÓLaighin, G. Application of Video-Based Methods for Competitive Swimming Analysis: A Systematic Review. Sport Exerc. Med. Open J. 2015, 1, 133–150. [Google Scholar] [CrossRef]
- Magalhaes, F.A.; Sawacha, Z.; Michele, R.D.; Cortesi, M.; Gatta, G.; Fantozzi, S. Effectiveness of an Automatic Tracking Software in Underwater Motion Analysis. J. Sports Sci. Med. 2013, 12, 660–667. [Google Scholar]
- Ceccon, S.; Ceseracciu, E.; Sawacha, Z.; Gatta, G.; Cortesi, M.; Cobelli, C.; Fantozzi, S. Motion Analysis of Front Crawl Swimming Applying CAST Technique by Means of Automatic Tracking. J. Sports Sci. 2013, 31, 276–287. [Google Scholar] [CrossRef]
- Ceseracciu, E.; Sawacha, Z.; Fantozzi, S.; Cortesi, M.; Gatta, G.; Corazza, S.; Cobelli, C. Markerless Analysis of Front Crawl Swimming. J. Biomech. 2011, 44, 2236–2242. [Google Scholar] [CrossRef]
- Mooney, R.; Corley, G.; Godfrey, A.; Quinlan, L.; ÓLaighin, G. Inertial Sensor Technology for Elite Swimming Performance Analysis: A Systematic Review. Sensors 2015, 16, 18. [Google Scholar] [CrossRef] [Green Version]
- Gatta, G.; Cortesi, M.; Di Michele, R. Power Production of the Lower Limbs in Flutter-Kick Swimming. Sports Biomech. 2012, 11, 480–491. [Google Scholar] [CrossRef]
- Bilinauskaite, M.; Mantha, V.R.; Rouboa, A.I.; Ziliukas, P.; Silva, A.J. Computational Fluid Dynamics Study of Swimmer’s Hand Velocity, Orientation, and Shape: Contributions to Hydrodynamics. BioMed Res. Int. 2013, 2013, 140487. [Google Scholar] [CrossRef] [PubMed]
- Bächlin, M.; Tröster, G. Swimming Performance and Technique Evaluation with Wearable Acceleration Sensors. Pervasive Mob. Comput. 2012, 8, 68–81. [Google Scholar] [CrossRef]
- Siirtola, P.; Laurinen, P.; Roning, J.; Kinnunen, H. Efficient Accelerometer-Based Swimming Exercise Tracking. In Proceedings of the 2011 IEEE Symposium on Computational Intelligence and Data Mining (CIDM), Paris, France, 11–15 April 2011; pp. 156–161. [Google Scholar]
- Chakravorti, N.; Le Sage, T.; Slawson, S.E.; Conway, P.P.; West, A.A. Design and Implementation of an Integrated Performance Monitoring Tool for Swimming to Extract Stroke Information at Real Time. IEEE Trans. Human-Mach. Syst. 2013, 43, 199–213. [Google Scholar] [CrossRef]
- Ohgi, Y.; Yasumura, M.; Ichikawa, H.; Miyaji, C. Analysis of Stroke Technique Using Acceleration Sensor IC in Freestyle Swimming. Eng. Sport 2000, 503–511. [Google Scholar]
- Dadashi, F.; Crettenand, F.; Millet, G.P.; Seifert, L.; Komar, J.; Aminian, K. Automatic Front-Crawl Temporal Phase Detection Using Adaptive Filtering of Inertial Signals. J. Sports Sci. 2013, 31, 1251–1260. [Google Scholar] [CrossRef] [PubMed]
- Mangia, A.L.; Cortesi, M.; Fantozzi, S.; Giovanardi, A.; Borra, D.; Gatta, G. The Use of IMMUs in a Water Environment: Instrument Validation and Application of 3D Multi-Body Kinematic Analysis in Medicine and Sport. Sensors 2017, 17, 927. [Google Scholar] [CrossRef] [Green Version]
- Cortesi, M.; Giovanardi, A.; Gatta, G.; Mangia, A.L.; Bartolomei, S.; Fantozzi, S. Inertial Sensors in Swimming: Detection of Stroke Phases through 3D Wrist Trajectory. J. Sports Sci. Med. 2019, 18, 438–447. [Google Scholar] [PubMed]
- McCabe, C.B.; Psycharakis, S.; Sanders, R. Kinematic Differences between Front Crawl Sprint and Distance Swimmers at Sprint Pace. J. Sports Sci. 2011, 29, 115–123. [Google Scholar] [CrossRef] [PubMed]
- Cortesi, M.; Fantozzi, S.; Gatta, G. Effects of Distance Specialization on the Backstroke Swimming Kinematics. J. Sports Sci. Med. 2012, 11, 526–532. [Google Scholar]
- Seifert, L.; L’Hermette, M.; Komar, J.; Orth, D.; Mell, F.; Merriaux, P.; Grenet, P.; Caritu, Y.; Hérault, R.; Dovgalecs, V.; et al. Pattern Recognition in Cyclic and Discrete Skills Performance from Inertial Measurement Units. Procedia Eng. 2014, 72, 196–201. [Google Scholar] [CrossRef] [Green Version]
- Mezêncio, B.; Pinho, J.P.; Huebner, R.; Vilas-Boas, J.P.; Amadio, A.C.; Serrão, J.C. Overall Indexes of Coordination in Front Crawl Swimming. J. Sports Sci. 2020, 38, 910–917. [Google Scholar] [CrossRef] [PubMed]
- Guignard, B.; Rouard, A.; Chollet, D.; Seifert, L. Behavioral Dynamics in Swimming: The Appropriate Use of Inertial Measurement Units. Front. Psychol. 2017, 8, 383. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gourgoulis, V.; Boli, A.; Aggeloussis, N.; Toubekis, A.; Antoniou, P.; Kasimatis, P.; Vezos, N.; Michalopoulou, M.; Kambas, A.; Mavromatis, G. The Effect of Leg Kick on Sprint Front Crawl Swimming. J. Sports Sci. 2014, 32, 278–289. [Google Scholar] [CrossRef]
- Fulton, S.K.; Pyne, D.B.; Burkett, B. Validity and Reliability of Kick Count and Rate in Freestyle Using Inertial Sensor Technology. J. Sports Sci. 2009, 27, 1051–1058. [Google Scholar] [CrossRef]
- Fulton, S.K.; Pyne, D.B.; Burkett, B. Quantifying Freestyle Kick-Count and Kick-Rate Patterns in Paralympic Swimming. J. Sports Sci. 2009, 27, 1455–1461. [Google Scholar] [CrossRef] [PubMed]
- McCabe, C.B.; Sanders, R.H.; Psycharakis, S.G. Upper Limb Kinematic Differences between Breathing and Non-Breathing Conditions in Front Crawl Sprint Swimming. J. Biomech. 2015, 48, 3995–4001. [Google Scholar] [CrossRef] [Green Version]
- Shell, S.J.; Clark, B.; Broatch, J.R.; Slattery, K.; Halson, S.L.; Coutts, A.J. Is a Head-Worn Inertial Sensor a Valid Tool to Monitor Swimming? Int. J. Sports Physiol. Perform. 2021, 16, 1901–1904. [Google Scholar] [CrossRef]
- Butterfield, J.; Tallent, J.; Patterson, S.D.; Jeffries, O.; Howe, L.; Waldron, M. The Validity of a Head-Worn Inertial Sensor for Measurements of Swimming Performance. Mov. Sport Sci. 2021, 114, 3–8. [Google Scholar] [CrossRef] [Green Version]
- McKay, A.K.A.; Stellingwerff, T.; Smith, E.S.; Martin, D.T.; Mujika, I.; Goosey-Tolfrey, V.L.; Sheppard, J.; Burke, L.M. Defining Training and Performance Caliber: A Participant Classification Framework. Int. J. Sports Physiol. Perform. 2021, 17, 317–331. [Google Scholar] [CrossRef]
- Hopkins, W.G. Linear Models and Effect Magnitudes for Research, Clinical and Practical Applications. Sportscience 2010, 14, 49–59. [Google Scholar]
- Hopkins, W.G.; Marshall, S.W.; Batterham, A.M.; Hanin, J. Progressive Statistics for Studies in Sports Medicine and Exercise Science. Med. Sci. Sports Exerc. 2009, 41, 3–12. [Google Scholar] [CrossRef] [PubMed] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
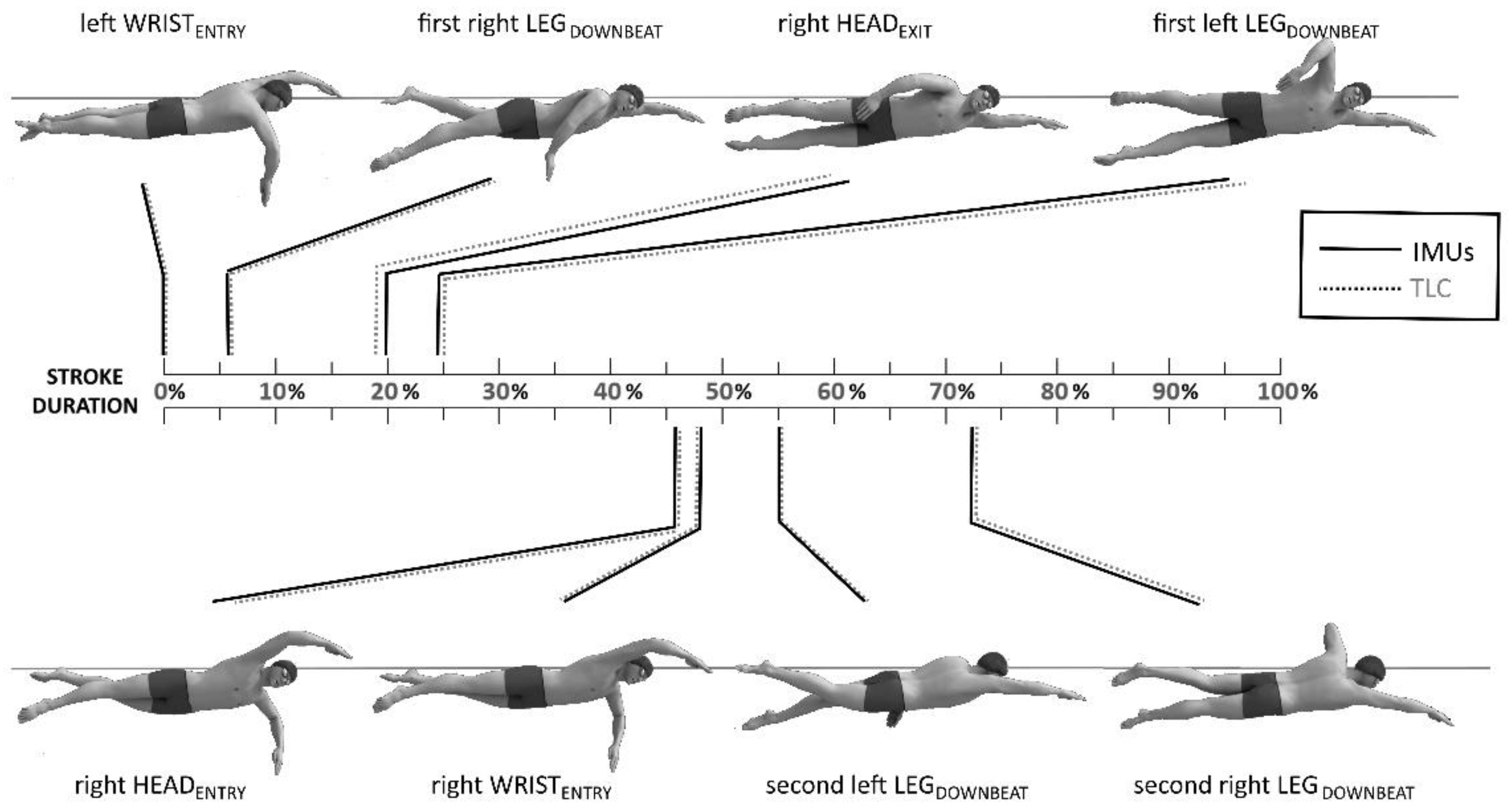
| Temporal Events | IMUs | TLC |
|---|---|---|
| First right LEGDOWNBEAT (%) | 2.3 ± 7.6 | 3.1 ± 6.9 |
| First left LEGDOWNBEAT (%) | 15.5 ± 9.4 | 16.0 ± 9.3 |
| Right HEADEXIT (%) | 15.9 ± 5.7 | 18.7 ± 2.8 |
| Right HEADENTRY (%) | 48.0 ± 2.0 | 48.4 ± 2.0 |
| Right WRISTENTRY (%) | 49.3 ± 2.2 | 49.0 ± 2.1 |
| Second left LEGDOWNBEAT (%) | 53.7 ± 8.3 | 53.0 ± 7.6 |
| Left HEADEXIT (%) | 58.2 ± 3.5 | 65.2 ± 3.5 |
| Second right LEGDOWNBEAT (%) | 64.1 ± 8.2 | 64.8 ± 8.7 |
| Left HEADENTRY (%) | 96.6 ± 1.0 | 96.8 ± 0.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fantozzi, S.; Coloretti, V.; Piacentini, M.F.; Quagliarotti, C.; Bartolomei, S.; Gatta, G.; Cortesi, M. Integrated Timing of Stroking, Breathing, and Kicking in Front-Crawl Swimming: A Novel Stroke-by-Stroke Approach Using Wearable Inertial Sensors. Sensors 2022, 22, 1419. https://doi.org/10.3390/s22041419
Fantozzi S, Coloretti V, Piacentini MF, Quagliarotti C, Bartolomei S, Gatta G, Cortesi M. Integrated Timing of Stroking, Breathing, and Kicking in Front-Crawl Swimming: A Novel Stroke-by-Stroke Approach Using Wearable Inertial Sensors. Sensors. 2022; 22(4):1419. https://doi.org/10.3390/s22041419
Chicago/Turabian StyleFantozzi, Silvia, Vittorio Coloretti, Maria Francesca Piacentini, Claudio Quagliarotti, Sandro Bartolomei, Giorgio Gatta, and Matteo Cortesi. 2022. "Integrated Timing of Stroking, Breathing, and Kicking in Front-Crawl Swimming: A Novel Stroke-by-Stroke Approach Using Wearable Inertial Sensors" Sensors 22, no. 4: 1419. https://doi.org/10.3390/s22041419