
A 3D Attitude Estimation Method Based on Attitude Angular Partial Feedback for Polarization-Based Integrated Navigation System


Abstract
:1. Introduction
2. INS/POL Integrated Navigation System Modeling
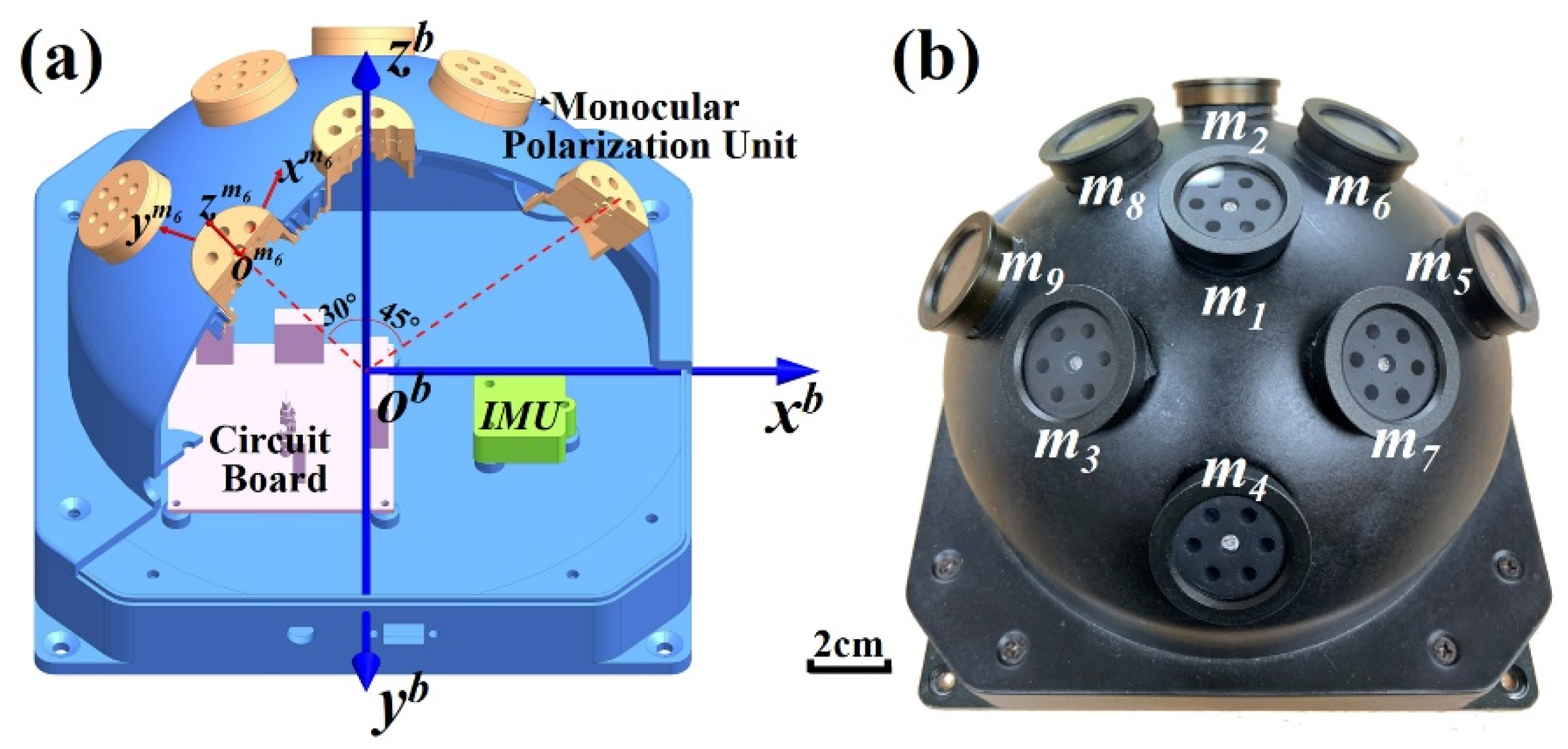
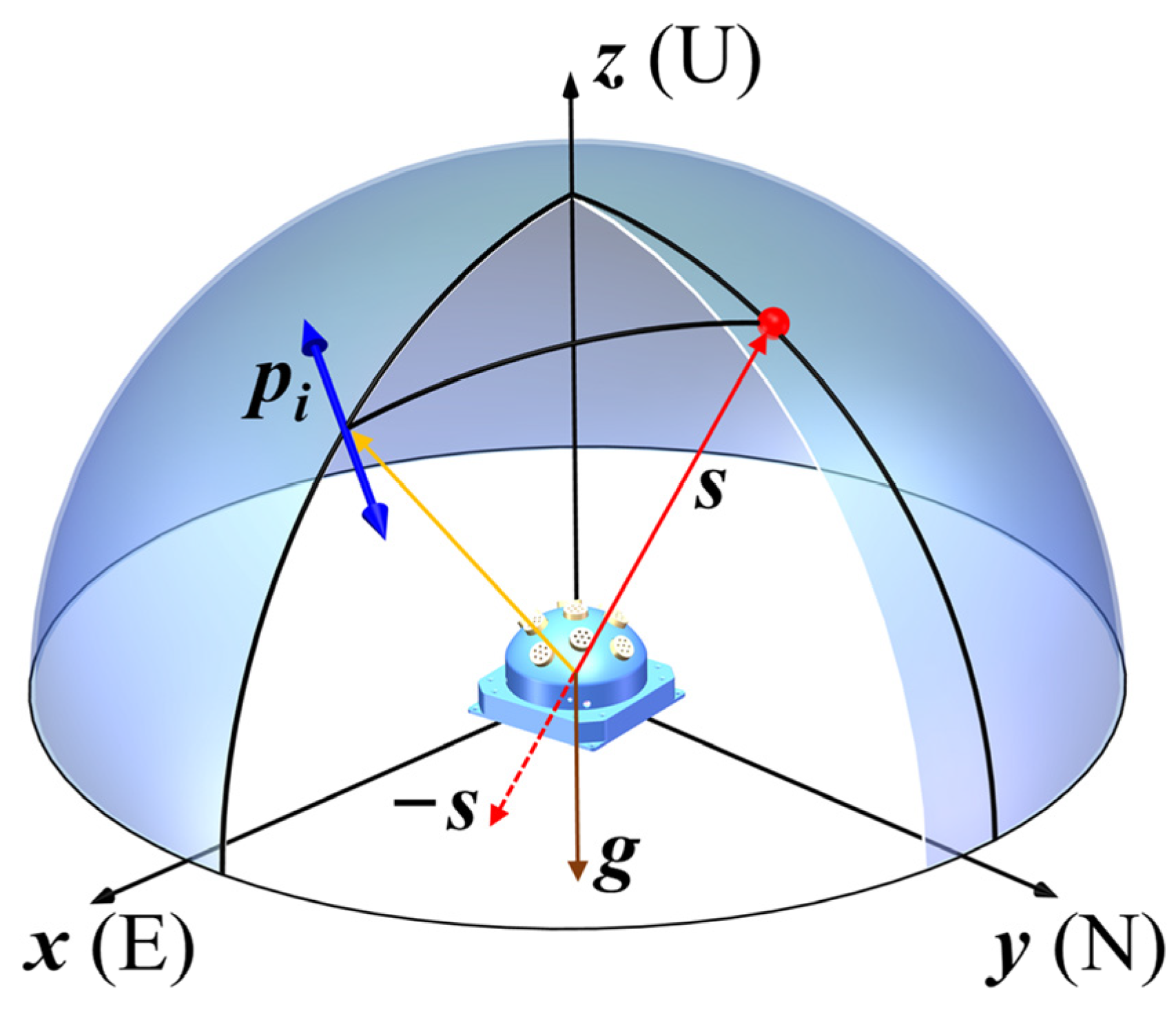
2.1. The Solar Vector Calculation Based on the Compound Eye Polarization Sensor
2.2. Integrated Navigation System Modeling
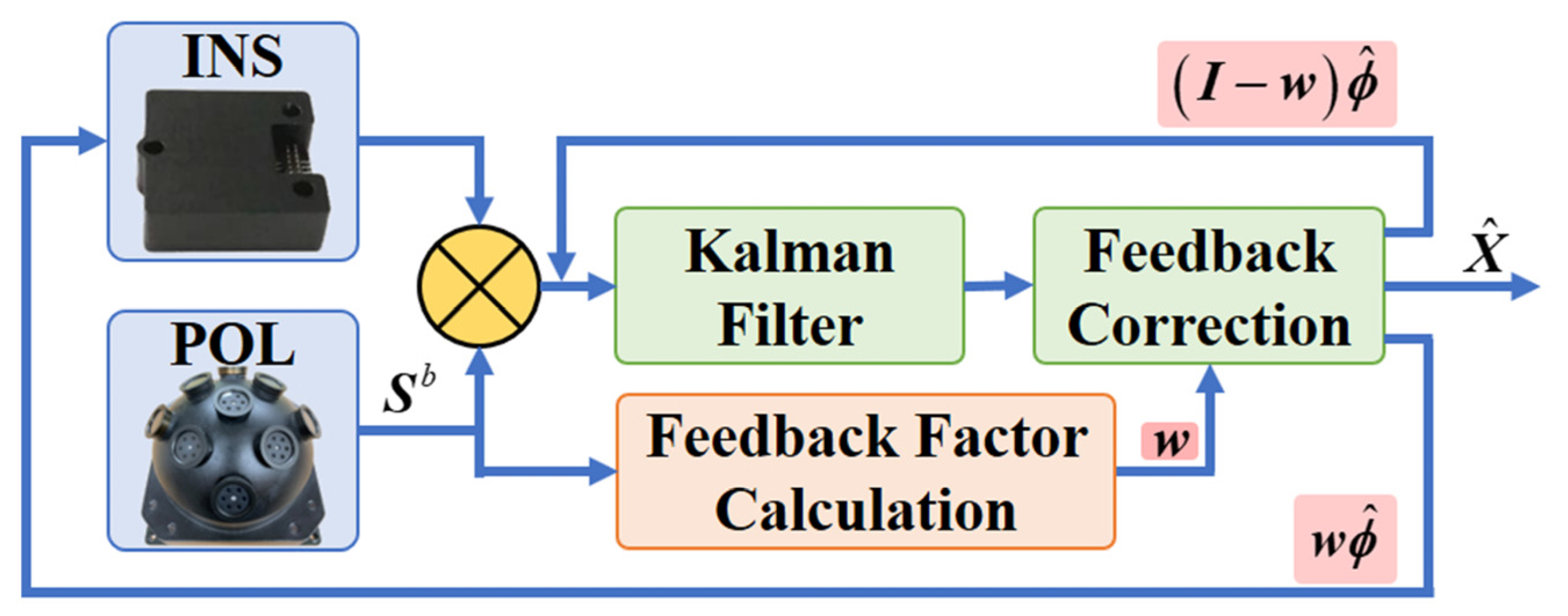
3. Adaptive Partial Feedback Method
3.1. Performance Analysis of the Conventional All-Feedback Method
- Time Update
- Measurement Update
3.2. Adaptive Partial Feedback Strategy Based on S-B Angles

4. Simulation
4.1. Attitude Angle Estimation Analysis Separately with Simulated Static Data
4.2. Yaw Estimation under Small with Simulated Dynamic Data
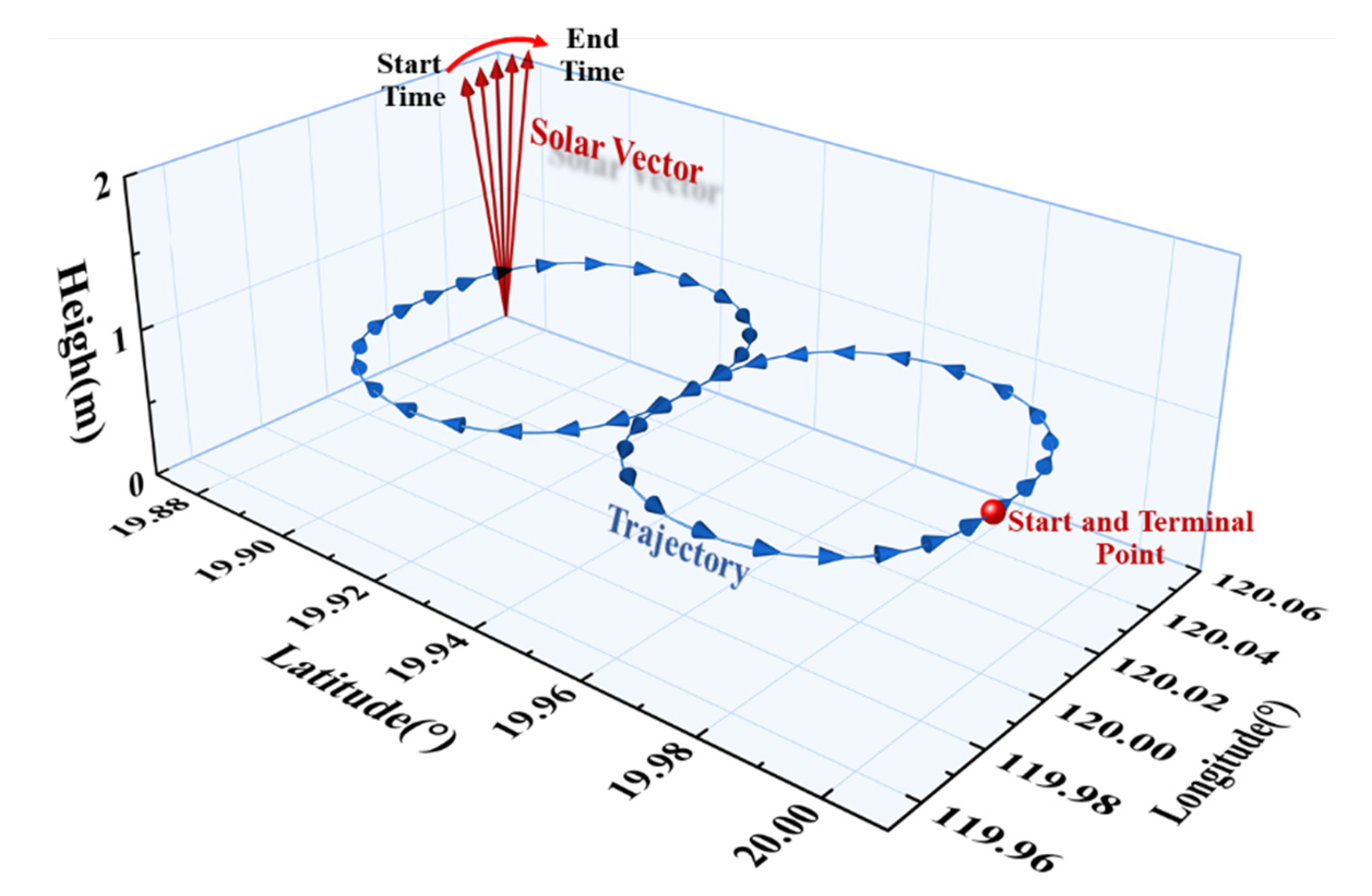
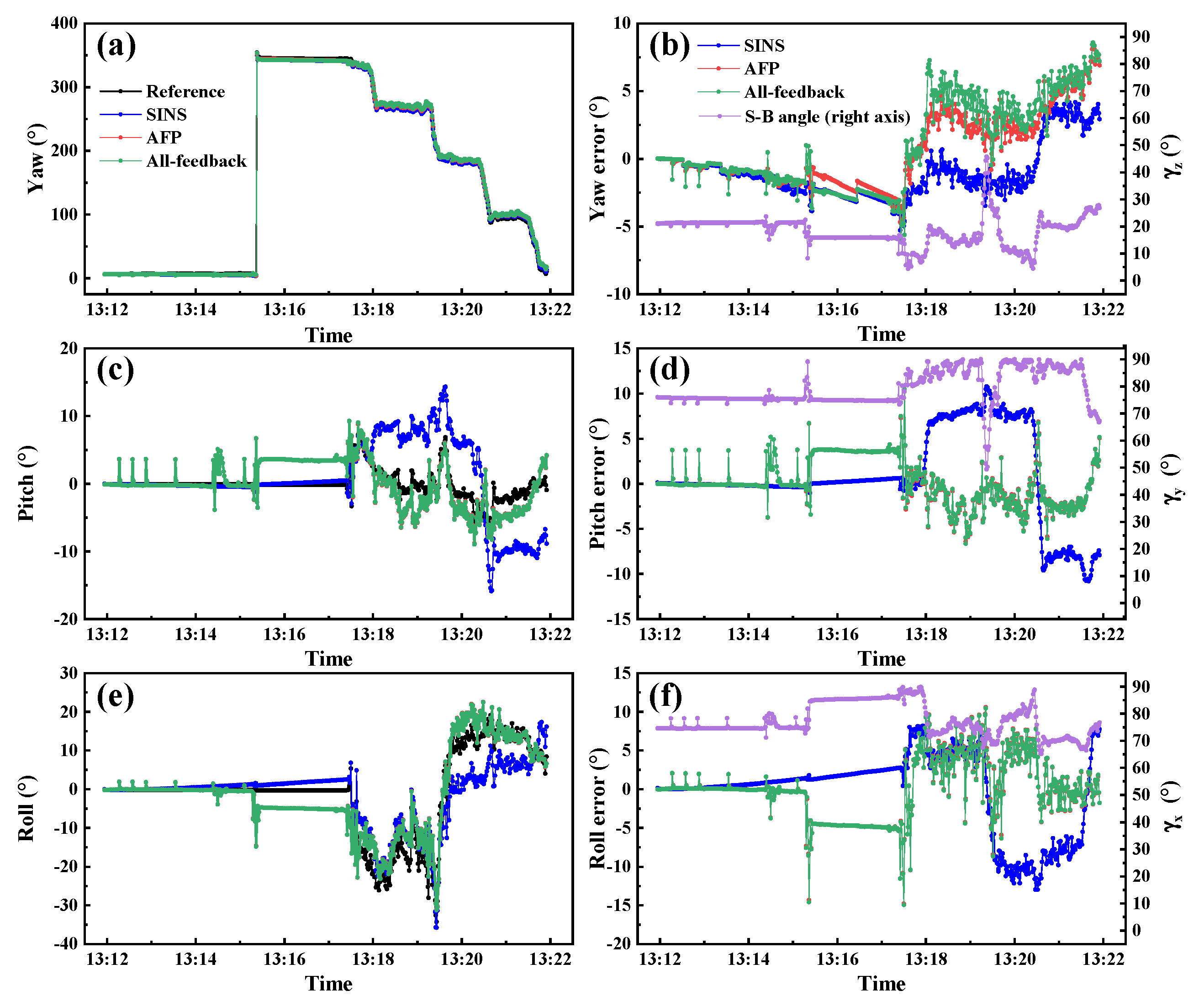
5. Real-World Experiment
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Greif, S.; Borissov, I.; Yovel, Y.; Holland, R.A. A Functional Role of the Sky’s Polarization Pattern for Orientation in the Greater Mouse-Eared Bat. Nat. Commun. 2014, 5, 4488. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Patel, R.N.; Cronin, T.W. Mantis Shrimp Navigate Home Using Celestial and Idiothetic Path Integration. Curr. Biol. 2020, 30, 1981–1987. [Google Scholar] [CrossRef] [PubMed]
- Dupeyroux, J.; Serres, J.R.; Viollet, S. AntBot: A Six-Legged Walking Robot Able to Home like Desert Ants in Outdoor Environments. Sci. Robot. 2019, 4, eaau0307. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Han, G.; Hu, X.; Lian, J.; He, X.; Zhang, L.; Wang, Y.; Dong, F. Design and Calibration of a Novel Bio-Inspired Pixelated Polarized Light Compass. Sensors 2017, 17, 2623. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lu, H.; Zhao, K.; Wang, X.; You, Z.; Huang, K. Real-Time Imaging Orientation Determination System to Verify Imaging Polarization Navigation Algorithm. Sensors 2016, 16, 144. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Powell, S.B.; Garnett, R.; Marshall, J.; Rizk, C.; Gruev, V. Bioinspired Polarization Vision Enables Underwater Geolocalization. Sci. Adv. 2018, 4, eaao6841. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Liu, X.; Zhang, Q.; Du, T.; Guo, L. Global Autonomous Positioning in GNSS-Challenged Environments: A Bio-Inspired Strategy by Polarization Pattern. IEEE Trans. Ind. Electron. 2021, 68, 6308–6317. [Google Scholar] [CrossRef]
- Wang, Y.; Chu, J.; Zhang, R.; Wang, L.; Wang, Z. A Novel Autonomous Real-Time Position Method Based on Polarized Light and Geomagnetic Field. Sci. Rep. 2015, 5, 9725–9730. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liang, H.; Bai, H.; Liu, N.; Shen, K. Limitation of Rayleigh Sky Model for Bioinspired Polarized Skylight Navigation in Three-Dimensional Attitude Determination. Bioinspir. Biomim. 2020, 15, 046007. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Yang, J.; Huang, P.; Liu, X.; Wang, S.; Guo, L. Bionic Integrated Positioning Mechanism Based on Bioinspired Polarization Compass and Inertial Navigation System. Sensors 2021, 21, 1055. [Google Scholar] [CrossRef]
- Zhi, W.; Chu, J.; Li, J.; Wang, Y. A Novel Attitude Determination System Aided by Polarization Sensor. Sensors 2018, 18, 158. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, J.; Du, T.; Liu, X.; Niu, B.; Guo, L. Method and Implementation of a Bio-Inspired Attitude and Heading Reference System by Integration of Polarization Compass and Inertial Sensors. IEEE Trans. Ind. Electron. 2019, 11, 9802–9812. [Google Scholar]
- Kong, X.; Wu, W.; Zhang, L.; He, X.; Wang, Y. Performance Improvement of Visual-Inertial Navigation System by Using Polarized Light Compass. Ind. Robot. 2016, 43, 588–595. [Google Scholar] [CrossRef]
- Jin, R.; Sun, H.; Sun, J.; Chen, W.; Chu, J. Integrated Navigation System for UAVs Based on the Sensor of Polarization. In Proceedings of the 2016 IEEE International Conference on Mechatronics and Automation, Harbin, China, 7–10 August 2016; pp. 2466–2471. [Google Scholar]
- He, R.; Hu, X.; Zhang, L.; He, X.; Han, G. A Combination Orientation Compass Based on the Information of Polarized Skylight/Geomagnetic/MIMU. IEEE Access 2020, 8, 10879–10887. [Google Scholar] [CrossRef]
- Fan, C.; Hu, X.; He, X.; Zhang, L.; Lian, J. Integrated Polarized Skylight Sensor and MIMU with a Metric Map for Urban Ground Navigation. IEEE Sens. J. 2018, 18, 1714–1722. [Google Scholar] [CrossRef]
- Chen, J.; Chu, J.; Li, J.; Zhang, R.; Wang, Y. Bio-Inspired Attitude Measurement Method Using a Polarization Skylight and a Gravitational Field. Appl. Opt. 2020, 59, 2955–2962. [Google Scholar]
- Du, T.; Tian, C.; Yang, J.; Wang, S.; Liu, X.; Guo, L. An Autonomous Initial Alignment and Observability Analysis for SINS with Bio-Inspired Polarized Skylight Sensors. IEEE Sens. J. 2020, 20, 7941–7956. [Google Scholar] [CrossRef]
- Stürzl, W.; Carey, N. A Fisheye Camera System for Polarisation Detection on UAVs. In Lecture Notes in Computer Science, Proceedings of the European Conference on Computer Vision, Florence, Italy, 7–13 October 2012; Fusiello, A., Murino, V., Cucchiara, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 431–440. [Google Scholar]
- Hamaoui, M. Polarized Skylight Navigation. Appl. Opt. 2017, 56, B37–B46. [Google Scholar] [CrossRef]
- Ning, X.; Liu, L.; Fang, J.; Wu, W. Initial Position and Attitude Determination of Lunar Rovers by INS/CNS Integration. Aerosp. Sci. Technol. 2013, 30, 323–332. [Google Scholar] [CrossRef]
- Gou, B.; Cheng, Y.; Ruiter, A.H.J. INS/CNS Navigation System Based on Multi-Star Pseudo Measurements. Aerosp. Sci. Technol. 2019, 95, 105506. [Google Scholar] [CrossRef]
- Xiaolin, N.; Weiping, Y.; Yanhong, L. A Tightly Coupled Rotational SINS/CNS Integrated Navigation Method for Aircraft. J. Syst. Eng. Electron. 2019, 30, 770–782. [Google Scholar]
- Ning, X.; Liu, L. A Two-Mode INS/CNS Navigation Method for Lunar Rovers. IEEE Trans. Instrum. Meas. 2014, 63, 2170–2179. [Google Scholar] [CrossRef]
- Yan, G.; Wang, J.; Zhou, X. High-Precision Simulator for Strapdown Inertial Navigation Systems Based on Real Dynamics from GNSS and IMU Integration. In Lecture Notes in Electrical Engineering; Springer: Berlin/Heidelberg, Germany, 2015; pp. 789–799. [Google Scholar]
- Liu, X.; Yang, J.; Guo, L.; Yu, X.; Wang, S. Design and Calibration Model of a Bioinspired Attitude and Heading Reference System Based on Compound Eye Polarization Compass. Bioinspir. Biomim. 2020, 16, 016001. [Google Scholar] [CrossRef] [PubMed]
- Hu, P.; Yang, J.; Guo, L.; Yu, X.; Li, W. Solar-Tracking Methodology Based on Refraction-Polarization in Snell’s Window for Underwater Navigation. Chin. J. Aeronaut. 2021, in press. [Google Scholar] [CrossRef]
- Reda, I.; Andreas, A. Solar Position Algorithm for Solar Radiation Applications. Sol. Energy 2004, 76, 577–589, Corrigendum in Sol. Energy 2007, 81, 838. [Google Scholar] [CrossRef]
- Quan, W.; Li, J.; Gong, X.; Fang, J. INS/CNS/GNSS Integrated Navigation Technology; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Chui, C.K.; Chen, G. Kalman Filtering; Springer: Berlin/Heidelberg Germany, 2017. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Integrated Strategies | Description |
|---|---|
| Measurement modeling based on a single E-vector [12,13] | Measurement equation is established by taking advantage of the vertical spatial relationship between E-vector and the solar vector. |
| Extracting yaw angle from POL measurements | The yaw angle can be calculated from the AoP [11,14] or the solar meridian [15,16] extracted from the AoP pattern image. Then the POL-based yaw is outputted directly or used for measurement modeling with INS. |
| Based on the solar vector calculated from polarization measurements [17,18] | The solar vector in the body coordinate system is calculated by two or more E-vectors in different view directions [19,20]. Then, the solar vector-based measurement equation can be established. |
| Acronyms | Definitions |
|---|---|
| POL | Polarization |
| INS | Inertial Navigation System |
| S-B angles | the angles between the Solar-vector and Body-axes of the platform |
| CPP | Celestial Polarization Pattern |
| RSN | the Ratio of Signal to Noise |
| SINS | Strapdown Inertial Navigation System |
| APF | Adaptive Partial Feedback |
| IMU | Inertial Measurement Unit |
| PAHRS | Polarization-based Attitude and Heading Reference System |
| RMSE | Root-Mean-Square Errors |
| Sensors | Specifications |
|---|---|
| Gyroscope | Bias stability: 2.5°/h |
| Random walk: 0.15°/ | |
| Accelerometer | Bias stability: 3.6 μg |
| Random walk: 0.012 m/s/ | |
| Polarization sensor | AoP accuracy: 0.15° (1 ) |
| Nominal /° | Time Interval | Date and Location | Solar Zenith or Real Min~Max (Mean)/° |
|---|---|---|---|
| 0 | 11:37:30–12:18:30 | 1 June 2020 20° N 120° E | 2.11~5.25 (3.34) |
| 15 | 12:39:30–13:20:30 | 9.93~19.37 (14.64) | |
| 30 | 13:43:30–14:44:30 | 24.69~34.17 (29.44) | |
| 45 | 14:49:00–15:30:00 | 39.83~49.26 (44.55) | |
| 60 | 15:54:30–16:38:30 | 54.86~64.17 (59.52) | |
| 75 | 17:01:30–17:42:30 | 70.02~79.11 (74.58) | |
| 90 | 18:12:00–18:53:00 | 85.50~94.41 (89.69) |
| Sensors | Specifications | Frequency | |
|---|---|---|---|
| INS | gyroscope | Bias stability: 0.2°/s | 20 Hz |
| Random walk: 0.01°/ | |||
| accelerometer | Bias stability: 1.6 × 103 μg | ||
| Random walk: 100 μg | |||
| Polarization sensor based solar tracker | Solar zenith | Constant error: 1° | 1/3 Hz |
| Random error: 0.3° | |||
| Solar azimuth | Constant error: 0.5° | ||
| Random error: 0.3° | |||
| Methods | RMSE (°) | ||
|---|---|---|---|
| Yaw | Pitch | Roll | |
| SINS | 7.72 | 3.24 | 2.74 |
| APF | 4.84 | 0.86 | 0.56 |
| All-feedback | 8.55 | 0.80 | 0.39 |
| Methods | RMSE (°) | ||
|---|---|---|---|
| Yaw | Pitch | Roll | |
| SINS | 2.20 | 5.02 | 2.15 |
| APF | 2.84 | 2.53 | 3.81 |
| All-feedback | 3.47 | 2.54 | 3.79 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, P.; Huang, P.; Qiu, Z.; Yang, J.; Liu, X. A 3D Attitude Estimation Method Based on Attitude Angular Partial Feedback for Polarization-Based Integrated Navigation System. Sensors 2022, 22, 710. https://doi.org/10.3390/s22030710
Hu P, Huang P, Qiu Z, Yang J, Liu X. A 3D Attitude Estimation Method Based on Attitude Angular Partial Feedback for Polarization-Based Integrated Navigation System. Sensors. 2022; 22(3):710. https://doi.org/10.3390/s22030710
Chicago/Turabian StyleHu, Pengwei, Panpan Huang, Zhenbing Qiu, Jian Yang, and Xin Liu. 2022. "A 3D Attitude Estimation Method Based on Attitude Angular Partial Feedback for Polarization-Based Integrated Navigation System" Sensors 22, no. 3: 710. https://doi.org/10.3390/s22030710