
Transcutaneous Functional Electrical Stimulation Controlled by a System of Sensors for the Lower Limbs: A Systematic Review
Abstract
:1. Introduction
- (1)
- High-level control (HLC): This one includes open-loop control and finite-state control (FSC). Open-loop control does not necessarily require the use of sensors. However, if it does, it is an ON-OFF control, which is a high-level control. It often requires continuous inputs from the user, who must then devote her/his attention to the operation of the FES device [7]. This method is currently widely used in patients with paresis due to its ease of implementation and use by users [8]. However, technically, this type presents with output errors, lack of sensitivity to external disturbances (e.g., spasticity), internal uncertainties (e.g., muscle fatigue), and overstimulation of muscle fibers [9]. These can affect the precision and duration of the executed movement [7]. FSC requires the use of sensors. This type of FES system performs a predefined stimulation sequence in an open loop when a condition of interest measured by sensors is satisfied. It is mainly used in patients with foot drop [10].
- (2)
- Low-level control (LLC): This one refers to closed-loop control. This type is a promising approach for trajectory tracking control [11]. LLC can be linear (LLLC) or nonlinear (NLLLC). Factors that influence FES-induced limb movements include:
2. Materials and Methods
2.1. Summary of the Development Phases of FES Systems
- (1)
- The development of signal processing technique for the feedback information extracted from the sensors, used for high- and low-level control, if any.
- (2)
- The development of an algorithm for the detection of the intention of movement or phase detection, for high-level control, when applicable.
- (3)
- The presence of a method for calibrating the FES parameters, if any.
- (4)
- The development of a dynamic model or an experimental identification model of FES.
- (5)
- The development of a control strategy, including the development of appropriate low-level controllers.
- (6)
- Numerical simulations, experiments on healthy subjects, and/or experiments on subjects with motor deficits.
2.2. Data Sources
- Involved limbs: lower limbs
- Type of FES electrodes: transcutaneous electrodes
- Involved living beings: healthy human subjects and/or human patients
- Development and/or presentation of a control strategy
- Use of sensors or generation of simulation results.
2.3. Data Extraction
- Only the main sensors used for extracting feedback signals were presented. Sensors used in the phase of the system identification were therefore not considered.
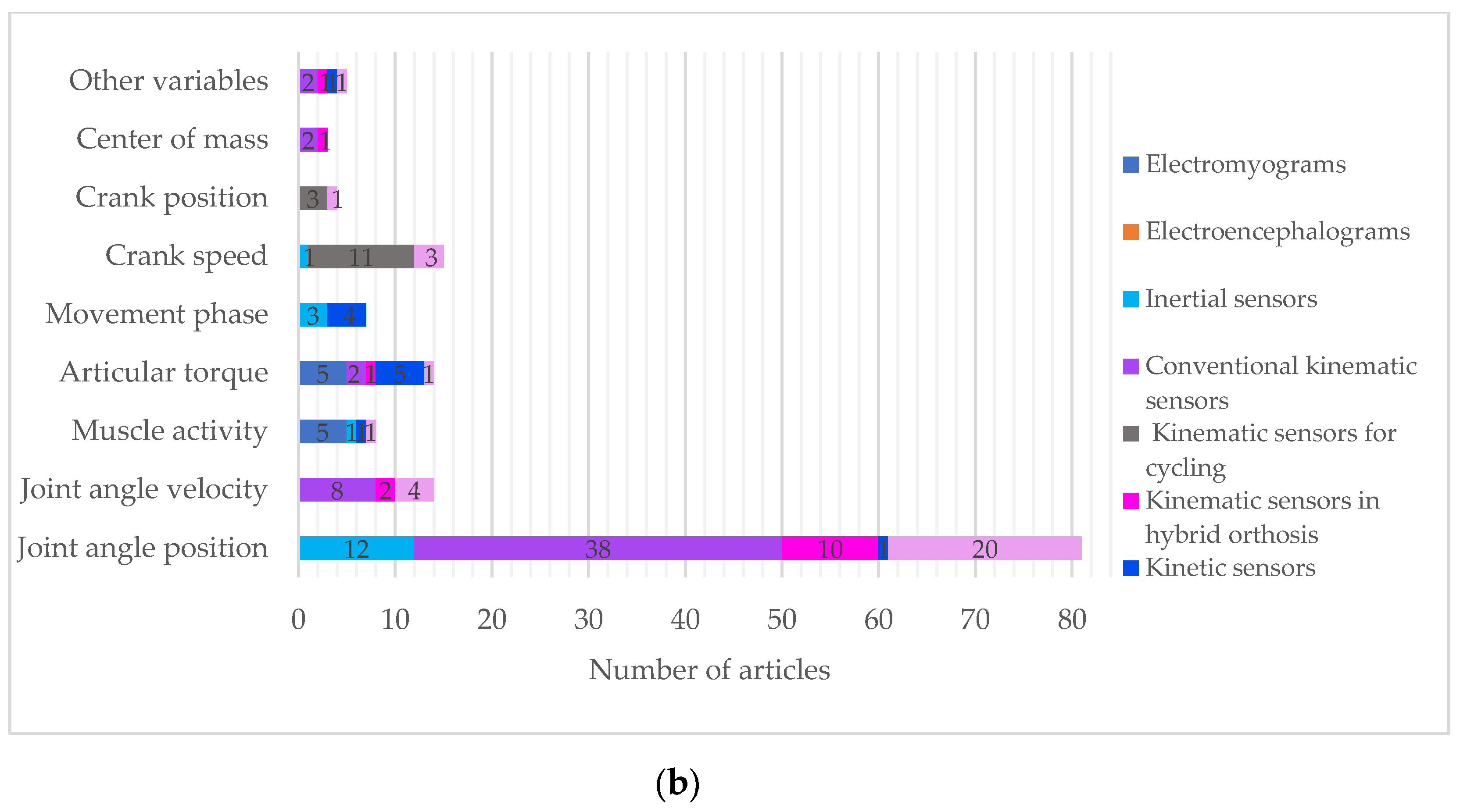
- The type of controlled variable was the last variable to appear at the output of the control system. In other words, the controlled variables in the inner loops of the control system were not mentioned in the main results of the overview.
- Only the control strategy used for FES was presented. Thus, for motorized hybrid systems, the control strategy used for motors was not presented.
2.4. Data Analysis
- Target joint: If the target joint is not explicitly stated in an article, it was simply deduced by the action of the stimulated muscles.
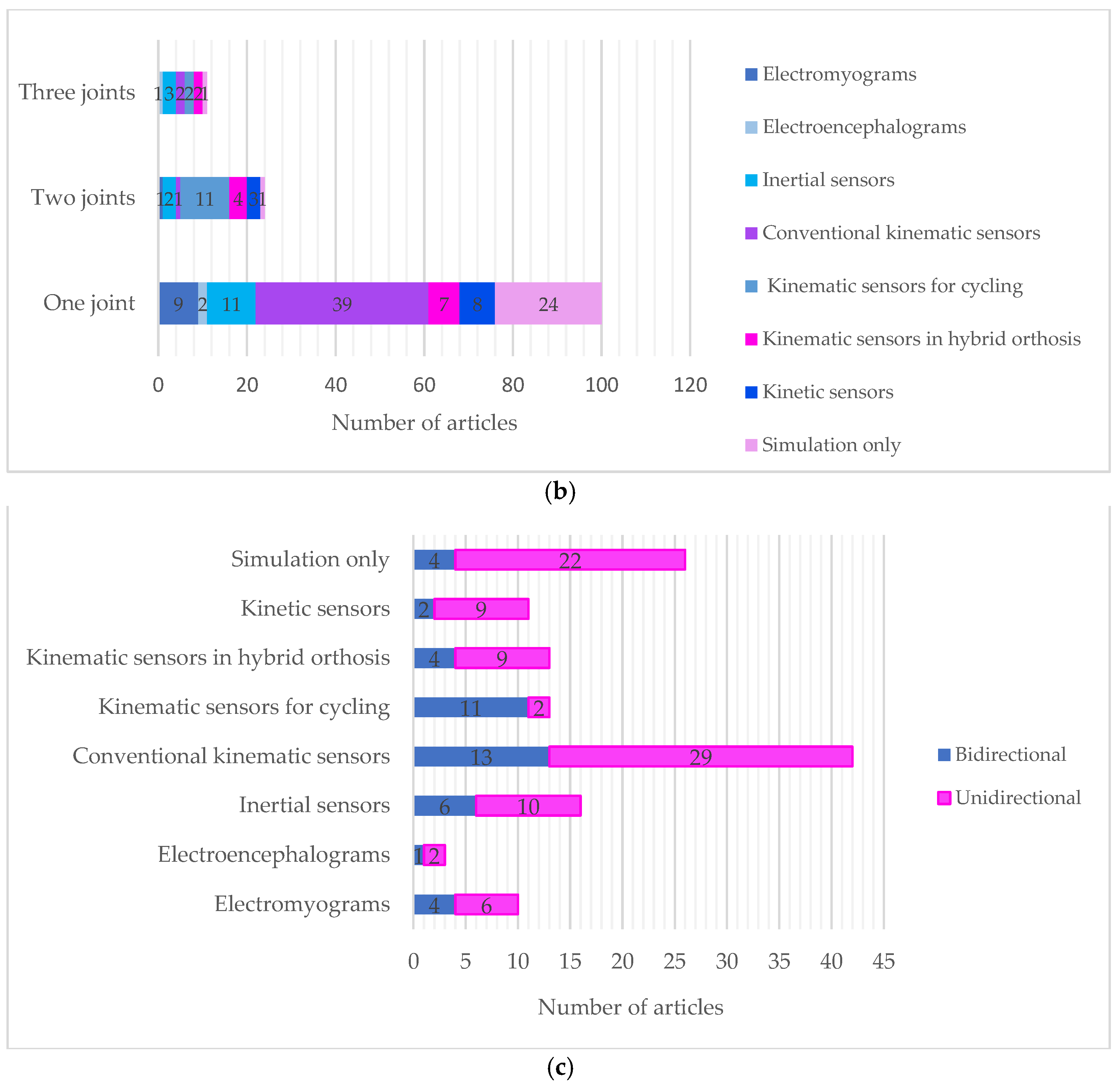
- Directionality of the movements induced by the FES: determined according to the stimulation of antagonist–agonist muscles acting on the same joint.
- Determination of the hierarchic level of control, i.e., high and/or low level: In this review, high level control includes open loop control (via inverse model-based control and ON-OFF control), and FSC. As for low level control, it included any control that allows trajectory tracking control or the reaching of a target value (which can be linear or nonlinear).
- Determination of the type of low-level control: In this review, a nonlinear controller was judged “nonlinear” only if it was used to compensate the system model’s nonlinearities, or if it is explicitly indicated in the article.
3. Results
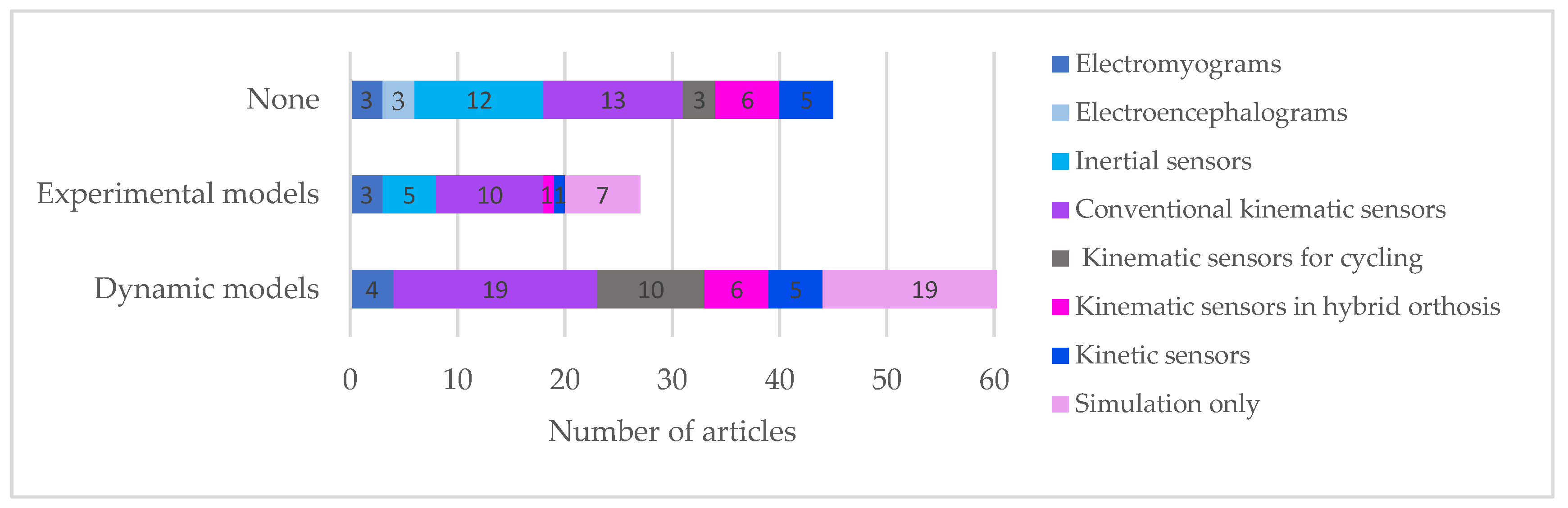
3.1. Modeling Methods of FES Systems
3.1.1. Dynamic Models
3.1.2. Experimental Identification Models
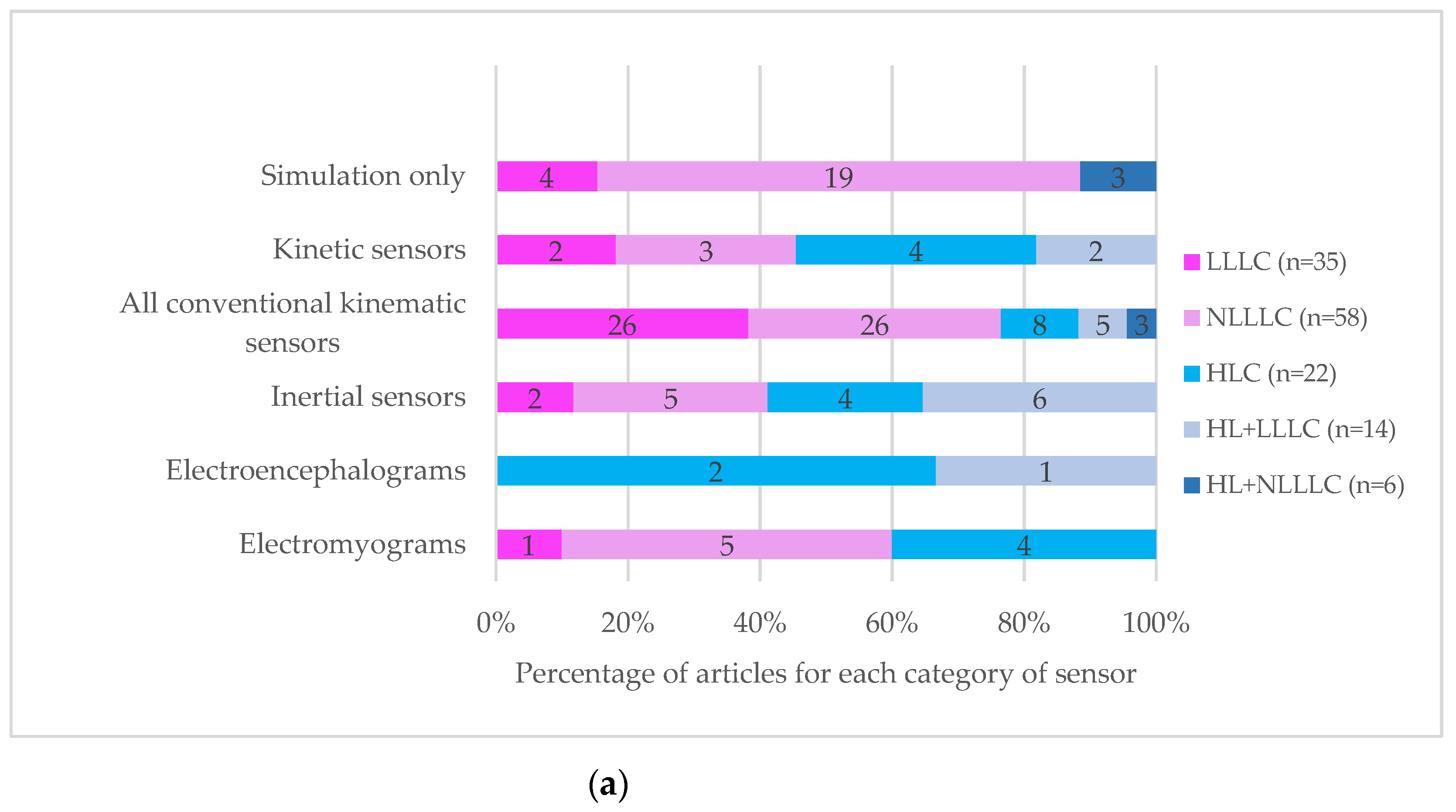
3.2. Type of Sensors Used in FES Systems
3.2.1. Electromyography
3.2.2. Electroencephalograms
3.2.3. Inertial Sensors
3.2.4. Conventional Kinematic Sensors
3.2.5. Kinetic Sensors
3.3. Control Strategies of FES Systems
3.3.1. Simple Flexion-extension Movements of a Limb
3.3.2. Walking
3.3.3. Standing Up
3.3.4. Maintaining Posture
3.3.5. Cycling and Rolling
3.4. Methods of Validation of FES Control Strategies
4. Discussion
4.1. Specific Objective #1: Modeling Method
4.2. Specific Objective #2: Type of Sensor
4.3. Specific Objective #3: Control Strategy
4.4. Specific Objective #4: Relationships between SO1, SO2, and SO3
4.4.1. Link between Modeling Method (SO1) and Type of Sensor (SO2)
4.4.2. Link between Type of Sensor (SO2) and Control Strategy (SO3)
4.4.3. Link between Modeling Method (SO1) and Control Strategy (SO3)
4.5. Specific Objective #5: Validation Method
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liberson, W.-T.; Holmquest, H.-J.; Scot, D.; Dow, M. Functional electrotherapy: Stimulation of the peroneal nerve synchronized with the swing phase of the gait of hemiplegic patients. Arch. Phys. Med. Rehabil. 1961, 42, 101–105. [Google Scholar] [PubMed]
- Kapadia, N.; Masani, K.; Catharine Craven, B.; Giangregorio, L.M.; Hitzig, S.L.; Richards, K.; Popovic, M.R. A randomized trial of functional electrical stimulation for walking in incomplete spinal cord injury: Effects on walking competency. J. Spinal Cord Med. 2014, 37, 511–524. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Taylor, P.; Humphreys, L.; Swain, I. The long-term cost-effectiveness of the use of Functional Electrical Stimulation for the correction of dropped foot due to upper motor neuron lesion. J. Rehabil. Med. 2013, 45, 154–160. [Google Scholar] [CrossRef] [Green Version]
- Armstrong, E.L.; Boyd, R.N.; Horan, S.A.; Kentish, M.J.; Ware, R.S.; Carty, C.P. Functional electrical stimulation cycling, goal-directed training, and adapted cycling for children with cerebral palsy: A randomized controlled trial. Dev. Med. Child Neurol. 2020, 62, 1406–1413. [Google Scholar] [CrossRef]
- Motavalli, G.; McElroy, J.J.; Alon, G. An Exploratory Electrical Stimulation Protocol in the Management of an Infant With Spina Bifida: A Case Report. Child Neurol. Open 2019, 6, 2329048X19835656. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Miller Renfrew, L.; Lord, A.C.; Warren, J.; Hunter, R. Evaluating the Effect of Functional Electrical Stimulation Used for Foot Drop on Aspects of Health-Related Quality of Life in People with Multiple Sclerosis: A Systematic Review. Int. J. MS Care 2019, 21, 173–182. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hausdorff, J.M.; Durfee, W.K. Open-loop position control of the knee joint using electrical stimulation of the quadriceps and hamstrings. Med. Biol. Eng. Comput. 1991, 29, 269–280. [Google Scholar] [CrossRef] [PubMed]
- Melo, P.L.; Silva, M.T.; Martins, J.M.; Newman, D.J. Technical developments of functional electrical stimulation to correct drop foot: Sensing, actuation and control strategies. Clin. Biomech. (Bristol Avon) 2015, 30, 101–113. [Google Scholar] [CrossRef] [Green Version]
- Davoodi, R.; Andrews, B.J. Switching curve control of functional electrical stimulation assisted rowing exercise in paraplegia. Med. Biol. Eng. Comput. 2003, 41, 183–189. [Google Scholar] [CrossRef]
- Sweeney, P.C.; Lyons, G.M.; Veltink, P.H. Finite state control of functional electrical stimulation for the rehabilitation of gait. Med. Biol. Eng. Comput. 2000, 38, 121–126. [Google Scholar] [CrossRef]
- Schauer, T. Sensing motion and muscle activity for feedback control of functional electrical stimulation: Ten years of experience in Berlin. Annu. Rev. Control 2017, 44, 355–374. [Google Scholar] [CrossRef]
- Jaramillo, P.; Shoemaker, A.; Leonessa, A.; Grange, R. Skeletal Muscle Contraction In Feedback Control. In Proceedings of the ASME 5th Annual Dynamic Systems and Control Conference Joint with the JSME 2012 11th Motion and Vibration Conference, Fort Lauderdale, FL, USA, 17–19 October 2012. [Google Scholar]
- Lynch, C.; Popovic, M. Functional Electrical Stimulation. IEEE Control Syst. 2008, 28, 40–50. [Google Scholar]
- Anaya-Reyes, F.; Narayan, A.; Aguirre-Ollinger, G.; Cheng, H.-J.; Yu, H. An Omnidirectional Assistive Platform Integrated with Functional Electrical Stimulation for Gait Rehabilitation: A Case Study. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 710–719. [Google Scholar] [CrossRef] [PubMed]
- Hwang, S.H.; Song, T.; Khang, G. A new feedback control system of muscle force induced by both electrical stimulation and voluntary activation. Int. J. Precis. Eng. Manuf. 2012, 13, 1903–1910. [Google Scholar] [CrossRef]
- Lynch, C.L.; Popovic, M.R. A Stochastic Model of Knee Angle in response to Electrical Stimulation of the Quadriceps and Hamstrings Muscles. Artif. Organs 2011, 35, 1169–1193. [Google Scholar] [CrossRef] [PubMed]
- Obuz, S.; Duenas, V.H.; Downey, R.J.; Klotz, J.R.; Dixon, W.E. Closed-Loop Neuromuscular Electrical Stimulation Method Provides Robustness to Unknown Time-Varying Input Delay in Muscle Dynamics. IEEE Trans. Control Syst. Technol. 2020, 28, 2482–2489. [Google Scholar] [CrossRef]
- Sharma, N.; Stegath, K.; Gregory, C.M.; Dixon, W.E. Nonlinear neuromuscular electrical stimulation tracking control of a human limb. IEEE Trans. Neural Syst. Rehabil. Eng. 2009, 17, 576–584. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Guiraud, D.; Andreu, D.; Gelis, A.; Fattal, C.; Hayashibe, M. Real-Time Closed-Loop Functional Electrical Stimulation Control of Muscle Activation with Evoked Electromyography Feedback for Spinal Cord Injured Patients. Int. J. Neural Syst. 2018, 28, 1750063. [Google Scholar] [CrossRef]
- Selfslagh, A.; Shokur, S.; Campos, D.S.F.; Donati, A.R.C.; Almeida, S.; Yamauti, S.Y.; Coelho, D.B.; Bouri, M.; Nicolelis, M.A.L. Non-invasive, Brain-controlled Functional Electrical Stimulation for Locomotion Rehabilitation in Individuals with Paraplegia. Sci. Rep. 2019, 9, 6782. [Google Scholar] [CrossRef] [Green Version]
- Watanabe, T.; Tadano, T. Experimental Tests of a Prototype of IMU-Based Closed-Loop Fuzzy Control System for Mobile FES Cycling with Pedaling Wheelchair; Institute of Electronics, Information and Communication, Engineers, IEICE: Tokyo, Japan, 2018; pp. 1906–1914. [Google Scholar]
- Noorsal, E.; Arof, S.; Yahaya, S.Z.; Hussain, Z.; Kho, D.; Mohd Ali, Y. Design of an FPGA-Based Fuzzy Feedback Controller for Closed-Loop FES in Knee Joint Model. Micromachines 2021, 12, 968. [Google Scholar] [CrossRef] [PubMed]
- Nunes, W.R.B.M.; Teodoro, R.G.; Sanches, M.A.A.; de Araujo, R.A.; Teixeira, M.C.M.; Carvalho, A.A. Switched Controller Applied to Functional Electrical Stimulation of Lower Limbs Under Fatigue Conditions: A Linear Analysis. In XXVI Brazilian Congress on Biomedical Engineering, Proceedings of the CBEB 2020, Vitória, Brazil, 26–30 October 2019; Springer: Cham, Switzerland, 2019; pp. 383–390. [Google Scholar]
- Li, Y.; Yang, X.; Zhou, Y.; Chen, J.; Du, M.; Yang, Y. Adaptive Stimulation Profiles Modulation for Foot Drop Correction Using Functional Electrical Stimulation: A Proof of Concept Study. IEEE J. Biomed. Health Inform. 2021, 25, 59–68. [Google Scholar] [CrossRef] [PubMed]
- Alouane, M.A.; Rifai, H.; Amirat, Y.; Mohammed, S. Cooperative Control for Knee Joint Flexion-Extension Movement Restoration. In Proceedings of the EEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018. [Google Scholar]
- Page, A.P.; Freeman, C.T.; Chu, B. Weighted Point-to-Point Repetitive Control for Drop-Foot Assistance. In Proceedings of the UKACC 12th International Conference on Control (CONTROL), Sheffield, UK, 5–7 September 2018. [Google Scholar]
- Ben Hmed, A.; Bakir, T.; Sakly, A.; Binczak, S. Input-Output Feedback Linearization Control (IOFLC) for muscle force control by functional electrical stimulation. In Proceedings of the 26th Mediterranean Conference on Control and Automation (MED), Zadar, Croatia, 19–22 June 2018. [Google Scholar]
- Bouri, M.; Selfslagh, A.; Campos, D.; Yonamine, S.; Donati, A.R.C.; Shokur, S. Closed-Loop Functional Electrical Stimulation for Gait Training for Patients with Paraplegia. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics, Kuala Lumpur, Malaysia, 12–15 December 2018. [Google Scholar]
- Arash Haghpanah, S.; Farrokhnia, M.; Taghvaei, S.; Eghtesad, M.; Ghavanloo, E. Tracking ankle joint movements during gait cycle via control of functional electrical stimulation. Proc. Inst. Mech. Eng. H 2022, 236, 239–247. [Google Scholar] [CrossRef] [PubMed]
- Azbell, J.; Park, J.K.; Chang, S.-H.; Engelen, M.P.; Park, H. Closed-loop Tactile Augmentation by Transcutaneous Stimulation on either the Foot Sole or the Palm to Improve Lateral Postural Balance. In Proceedings of the 9th International IEEE EMBS Conference on Neural Engineering, San Francisco, CA, USA, 20–23 March 2019. [Google Scholar]
- Li, Z.; Yin, Z. A Method for FES Control of Human Knee Joint with Time-dependent Model Parameters. In Proceedings of the IEEE 15th International Conference on Control and Automation (ICCA), Edinburgh, Scotland, 16–19 July 2019. [Google Scholar]
- Molazadeh, V.; Zhang, Q.; Bao, X.; Sharma, N. An Iterative Learning Controller for a Switched Cooperative Allocation Strategy During Sit-to-Stand Tasks with a Hybrid Exoskeleton. IEEE Trans. Control Syst. Technol. 2022, 30, 1021–1036. [Google Scholar] [CrossRef]
- Ibitoye, M.O.; Hamzaid, N.A.; Hayashibe, M.; Hasnan, N.; Davis, G.M. Restoring prolonged standing via functional electrical stimulation after spinal cord injury: A systematic review of control strategies. Biomed. Signal Process. Control 2018, 49, 34–47. [Google Scholar] [CrossRef]
- Gil-Castillo, J.; Alnajjar, F.; Koutsou, A.; Torricelli, D.; Moreno, J.C. Advances in neuroprosthetic management of foot drop: A review. J. Neuroeng. Rehabil. 2020, 17, 46. [Google Scholar] [CrossRef] [PubMed]
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The PRISMA 2020 statement: An updated guideline for reporting systematic reviews. Syst. Rev. 2021, 10, 89. [Google Scholar] [CrossRef]
- Li, Z.; Hayashibe, M.; Andreu, D.; Guiraud, D. Real-time Closed-loop FES Control of Muscle Activation with Evoked EMG Feedback. In Proceedings of the 7th International IEEE/EMBS Conference on Neural Engineering, Montpellier, France, 22–24 April 2015. [Google Scholar]
- Hayashibe, M.; Zhang, Q.; Azevedo Coste, C. Dual Predictive Control of Electrically Stimulated Muscle using Biofeedback for Drop Foot Correction. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 1731–1736. [Google Scholar]
- Zhang, Q.; Hayashibe, M.; Azevedo-Coste, C. Evoked electromyography-based closed-loop torque control in functional electrical stimulation. IEEE Trans. Biomed. Eng. 2013, 60, 2299–2307. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hunt, K.J.; Munih, M.; Donaldson, N.; Barr, F.M.D. Optimal Control of Ankle Joint Moment: Toward Unsupported Standing in Paraplegia. IEEE Trans. Autom. Control 1998, 43, 819–832. [Google Scholar] [CrossRef] [Green Version]
- Merad, M.; Downey, R.J.; Obuz, S.; Dixon, W.E. Isometric Torque Control for Neuromuscular Electrical Stimulation With Time-Varying Input Delay. IEEE Trans. Control Syst. Technol. 2016, 24, 971–978. [Google Scholar] [CrossRef]
- Sanches, M.A.A.; Gaino, R.; Kozan, R.F.; Teixeira, M.C.M.; de Carvalho, A.A.; Covacic, M.R.; Alves, C.A.; Urban, M.F.R.; Junqueira, M.V.N.; Cardim, R.; et al. Digital controller design considering hardware constraints: Application in a paraplegic patient. Rev. Bras. De Eng. Biomédica 2014, 30, 232–241. [Google Scholar] [CrossRef] [Green Version]
- Miranda-Linares, D.; Tokhi, M.O. Finite state control of exoskeleton and wheel walker for gait restoration. Mob. Serv. Robot. 2014, 77–84. [Google Scholar] [CrossRef]
- Holderbaum, W.; Hunt, K.J.; Gollee, H. H robust control design for unsupported paraplegic standing: Experimental evaluation. Control Eng. Pract. 2002, 10, 1211–1222. [Google Scholar] [CrossRef]
- Meng, L.; Porr, B.; Macleod, C.A.; Gollee, H. A functional electrical stimulation system for human walking inspired by reflexive control principles. Proc. Inst. Mech. Eng. H 2017, 231, 315–325. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nekoukar, V.; Erfanian, A. Adaptive fuzzy terminal sliding mode control for a class of MIMO uncertain nonlinear systems. Fuzzy Sets Syst. 2011, 179, 34–49. [Google Scholar] [CrossRef]
- Komiyama, C.; Saito, E.; Tomita, Y.; Honda, S. Hybrid FES Orthosis for Standing up in Paraplegia. In Proceedings of the IEEE Instrumentation and Measurement Technolgy Conference, Hamamatsu, Japan, 10–12 May 1994. [Google Scholar]
- Peasgood, W.; Whitlock, T.; Bateman, A.; Fry, M.E.; Jones, R.S.; Davis-Smith, A. EMG-controlled closed loop electrical stimulation using a digital signal processor. Electron. Lett. 2000, 36, 1832–1833. [Google Scholar] [CrossRef]
- Yeom, H.; Chang, Y.H. Autogenic EMG-controlled functional electrical stimulation for ankle dorsiflexion control. J. Neurosci. Methods 2010, 193, 118–125. [Google Scholar] [CrossRef] [Green Version]
- Rossi, F.; Ros, P.M.; Cecchini, S.; Crema, A.; Micera, S.; Demarchi, D. An Event-Driven Closed-Loop System for Real-Time FES Control. In Proceedings of the 26th IEEE International Conference on Electronics, Circuits and Systems (ICECS), Genoa, Italy, 27–29 November 2019. [Google Scholar]
- Li, Z.; Guiraud, D.; Andreu, D.; Fattal, C.; Gelis, A.; Hayashibe, M. A hybrid functional electrical stimulation for real-time estimation of joint torque and closed-loop control of muscle activation. Eur. J. Transl. Myol. 2016, 26, 6064. [Google Scholar] [CrossRef] [Green Version]
- Broniera Junior, P.; Campos, D.P.; Lazzaretti, A.E.; Nohama, P.; Carvalho, A.A.; Krueger, E.; Minhoto Teixeira, M.C. EEG-FES-Force-MMG closed-loop control systems of a volunteer with paraplegia considering motor imagery with fatigue recognition and automatic shut-off. Biomed. Signal Process. Control 2021, 68, 102662. [Google Scholar] [CrossRef]
- Valtin, M.; Kociemba, K.; Behling, C.; Kuberski, B.; Becker, S.; Schauer, T. RehaMovePro: A versatile mobile stimulation system for transcutaneous FES applications. Eur. J. Transl. Myol. 2016, 26, 6076. [Google Scholar] [CrossRef]
- Basith, A.L.; Arifin, A.; Arrofiqi, F.; Watanabe, T.; Nuh, M. Embedded Fuzzy Logic Controller for Functional Electrical Stimulation System. In Proceedings of the International Seminar of Intelligent Technology and Its Application, Lombok, Indonesia, 28–30 July 2016; pp. 89–94. [Google Scholar]
- Basith, A.L.; Setiawan, S.; Arifin, A.; Arrofiqi, F.; Nuh, M. Design And Tests Of A Wearable Functional Electrical Stimulation (FES) System For Knee Joint Movement Using Cycle-To-Cycle Control Method. J. Theor. Appl. Inf. Technol. 2017, 95, 2523–2531. [Google Scholar]
- Arrofiqi, F.; Arifin, A.; Indrajaya, B. Design of Wearable System for Closed-Loop Control of Gait Restoration System by Functional Electrical Stimulation. In Proceedings of the 2015 International Seminar on Intelligent Technology and Its Applications, Surabaya, Indonesia, 20–21 May 2015; pp. 131–136. [Google Scholar]
- Sijobert, B.; Azevedo, C.; Pontier, J.; Graf, S.; Fattal, C. A Sensor-Based Multichannel FES System to Control Knee Joint and Reduce Stance Phase Asymmetry in Post-Stroke Gait. Sensors 2021, 21, 2134. [Google Scholar] [CrossRef] [PubMed]
- Zahradka, N.; Behboodi, A.; Wright, H.; Bodt, B.; Lee, S. Evaluation of Gait Phase Detection Delay Compensation Strategies to Control a Gyroscope-Controlled Functional Electrical Stimulation System During Walking. Sensors 2019, 19, 2471. [Google Scholar] [CrossRef]
- Pappas, I.P.I.; Keller, T.; Mangold, S.; Popovic, M.; Dietz, V.; Morari, M. A Reliable Gyroscope-Based Gait-Phase Detection Sensor Embedded in a Shoe Insole. IEEE Sens. J. 2004, 4, 268–274. [Google Scholar] [CrossRef]
- Braz, G.P.; Russold, M.; Smith, R.M.; Davis, G.M. Motion Sensors Feedback in FES Gait: A Novel Control Strategy. IFMBE Proc. 2007, 14, 2860–2863. [Google Scholar]
- Liu, C.-L.; Yu, C.-H.; Chen, S.-C.; Chen, C.-H. Valuation of closed-loop control system for restoring standing and sitting functions by functional electrical stimulation. Biomed. Eng. Appl. Basis Commun. 2005, 17, 19–26. [Google Scholar] [CrossRef]
- Bouri, M.; Abdi, E.; Bleuler, H.; Reynard, F.; Deriaz, O. Lower Limbs Robotic Rehabilitation Case Study with Clinical Trials. In New Trends in Medical and Service Robots; Springer: Berlin/Heidelberg, Germany, 2014; pp. 31–44. [Google Scholar]
- Kirtley, C.; Andrews, B.J. Control of functional electrical stimulation with extended physiological proprioception. J. Biomed. Eng. 1990, 12, 183–188. [Google Scholar] [CrossRef]
- Kirkwood, C.A.; Andrews, B.J. Finite state control of FES systems: Application of ai inductive learning techniques. In Proceedings of the Engineering In Medicine G Biology Society 11th Annual International Conference, Seattle, WA, USA, 9–12 November 1989. [Google Scholar]
- Chen, Y.-L.; Kuo, T.-S. A feedback controlled FES in rehabilitation. In Handbook of Research on Personal Autonomy Technologies and Disability Informatics; Idea Group Inc.: Calgary, AB, Canada, 2010; pp. 144–153. [Google Scholar]
- Chen, Y.-L.; Li, Y.-C.; Kuo, T.-S.; Lai, J.-S. The development of a closed-loop controlled functional electrical stimulation (FES) in gait training. J. Med. Eng. Technol. 2001, 25, 41–48. [Google Scholar]
- Hatwell, M.S.; Oderkerk, B.J.; Sacher, C.A.; Inbar, G.F. The Devloppement of a Model Reference Adaptive Controller to Control the Knee Joint of Paraplegics. IEEE Trans. Autom. Control 1991, 36, 683–691. [Google Scholar] [CrossRef]
- Eom, G.-M.; Lee, J.-K.; Kim, K.-S.; Watanabe, T.; Futami, R. Nonlinear FES Control of Knee Joint by Inversely Compensated Feedback System. Int. J. Control Autom. Syst. 2006, 4, 302–307. [Google Scholar]
- Montazeri, M.; Yousefi, M.R.; Shojaei, K.; Shahgholian, G. Fast adaptive fuzzy terminal sliding mode control of synergistic movement of the hip and knee joints (air-stepping) using functional electrical stimulation: A simulation study. Biomed. Signal Process. Control 2021, 66, 102445. [Google Scholar] [CrossRef]
- Mohammed, S.; Poignet, P.; Guiraud, D. Closed Loop Nonlinear Model Predictive Control Applied On Paralyzed Muscles To Restore Lower Limbs Functions. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006. [Google Scholar]
- Sharma, N.; Gregory, C.M.; Johnson, M.; Dixon, W.E. Closed-Loop Neural Network-Based NMES Control for Human Limb Tracking. IEEE Trans. Control Syst. Technol. 2012, 20, 712–725. [Google Scholar] [CrossRef] [Green Version]
- Mohammed, S.; Fraisse, P.; Guiraud, D.; Poignet, P.; El Makssoud, H. Robust control law strategy based on High Order Sliding Mode: Towards a muscle control. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Center Edmont, AB, Canada, 2–6 August 2005. [Google Scholar]
- Tang, Y.; Leonessa, A. Functional electrical stimulation of a quadriceps muscle using a neural-network adaptive control approach. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Proceedings (IMECE), Seattle, WA, USA, 11–15 November 2007. [Google Scholar]
- Sharma, N. A Predictor-based Compensation for Electromechanical Delay during Neuromuscular Electrical Stimulation-II. In Proceedings of the 2012 American Control Conference, Fairmont Queen Elizabeth, Montréal, QC, Canada, 27–29 June 2012; Volume 5604–5609. [Google Scholar]
- Ferrarin, M.; Pedotti, A. The Relationship Between Electrical Stimulus and Joint Torque: A Dynamic Model. IEEE Trans. Rehabil. Eng. 2000, 8, 342–352. [Google Scholar] [CrossRef]
- Alibeji, N.; Kirsch, N.; Farrokhi, S.; Sharma, N. Further Results on Predictor-Based Control of Neuromuscular Electrical Stimulation. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 1095–1105. [Google Scholar] [CrossRef]
- Obuz, S.; Downey, R.J.; Klotz, J.R.; Dixon, W.E. Unknown Time-Varying Input Delay Compensation for Neuromuscular Electrical Stimulation. In Proceedings of the 2015 IEEE Conference on Control Applications (CCA) Part of 2015 IEEE Multi-Conference on Systems and Control, Sydney, Australia, 21–23 September 2015. [Google Scholar]
- Cheng, T.H.; Wang, Q.; Kamalapurkar, R.; Dinh, H.T.; Bellman, M.; Dixon, W.E. Identification-Based Closed-Loop NMES Limb Tracking With Amplitude-Modulated Control Input. IEEE Trans. Cybern. 2016, 46, 1679–1690. [Google Scholar] [CrossRef]
- Lynch, C.L.; Popovic, M.R. A comparison of closed-loop control algorithms for regulating electrically stimulated knee movements in individuals with spinal cord injury. IEEE Trans. Neural Syst. Rehabil. Eng. 2012, 20, 539–548. [Google Scholar] [CrossRef]
- Sharma, N.; Gregory, C.M.; Johnson, M.; Dixon, W.E. Modified Neural Network-based Electrical Stimulation for Human Limb Tracking. In Proceedings of the 2008 IEEE International Symposium on Intelligent Control Part of 2008 IEEE Multi-conference on Systems and Control, San Antonio, TX, USA, 3–5 September 2008; pp. 1320–1325. [Google Scholar]
- Ferrarin, M.; Palazzo, F.; Riener, R.; Quintern, J. Model-Based Control of FES-Induced Single Joint Movements. IEEE Trans. Neural Syst. Rehabil. Eng. 2001, 9, 247–257. [Google Scholar] [CrossRef] [PubMed]
- Huqa, M.S.; Tokhib, M.O. Genetic algorithms based approach for designing spring brake orthosis—Part II: Control of FES induced movement. Appl. Bionics Biomech. 2012, 9, 317–331. [Google Scholar] [CrossRef] [Green Version]
- Alibeji, N.; Kirsch, N.; Sharma, N. Dynamic Surface Control of Neuromuscular Electrical Stimulation of a Musculoskeletal System with Activation Dynamics and an Input Delay. In Proceedings of the 2015 American Control Conference, Chicago, IL, USA, 1–3 July 2015. [Google Scholar]
- Downey, R.J.; Cheng, T.H.; Bellman, M.J.; Dixon, W.E. Closed-Loop Asynchronous Neuromuscular Electrical Stimulation Prolongs Functional Movements in the Lower Body. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 1117–1127. [Google Scholar] [CrossRef]
- Wang, Q.; Sharma, N.; Johnson, M.; Dixon, W.E. Asymptotic Optimal Control of Neuromuscular Electrical Stimulation. In Proceedings of the 49th IEEE Conference on Decision and Control, Atlanta, GA, USA, 15–17 December 2010. [Google Scholar]
- Wang, Q.; Kamalapurkar, R.; Downey, R.; Dixon, W.E. Hybrid electrical stimulation tracking control of the ankle. In Proceedings of the ASME 2012 5th Annual Dynamic Systems and Control Conference joint with the JSME 2012 11th Motion and Vibration Conference, Fort Lauderdale, FL, USA, 17–19 October 2012. [Google Scholar]
- Matjacic, Z.; Blajd, T. Arm-Free Paraplegic Standing—Part I: Control Model Synthesis and Simulation. IEEE Trans. Rehabil. Eng. 1998, 6, 125–138. [Google Scholar] [CrossRef]
- Mihelj, M.; Munih, M. Double Inverted Pendulum Optimal Control - Basis for Unsupported Standing in Paraplegia. In Proceedings of the 7th International Workshop on Advanced Motion Control. Proceedings, Hotel Habakuk, Maribor, Slovenia, 3–5 July 2002. [Google Scholar]
- Riener, R.; Fuhr, T. Patient-Driven Control of FES-Supported Standing Up: A Simulation Study. IEEE Trans. Rehabil. Eng. 1998, 6, 113–124. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jaeger, R.J. Design and simulation of closed-loop electrical stimulation orthoses for restoration of quiet standing in paraplegia. J. Biomech. 1986, 19, 825–835. [Google Scholar] [CrossRef] [PubMed]
- Jovic, J.; Bonnet, V.; Fattal, C.; Fraisse, P.; Azevedo Coste, C. A new 3D center of mass control approach for FES-assisted standing: First experimental evaluation with a humanoid robot. Med. Eng. Phys. 2016, 38, 1270–1278. [Google Scholar] [CrossRef] [PubMed]
- Vette, A.H.; Kim, J.-y.; Masani, K.; Popovic, M.R. Closed-Loop Control of FES-Assisted Arm-Free Paraplegic Standing: A Feasibility Study. In Proceedings of the EUROCON 2005—The International Conference on “Computer as a Tool”, Belgrade, Serbia and Montenegro, 21–24 November 2005. [Google Scholar]
- Rouhani, H.; Same, M.; Masani, K.; Li, Y.Q.; Popovic, M.R. Closed-loop Control of Standing Neuroprosthesis Using PID Controller. In Proceedings of the 2017 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Banff Center, Banff, AB, Canada, 5–8 October 2017; pp. 2237–2242. [Google Scholar]
- Jaime, R.P.; Matjacic, Z.; Hunt, K.J. Paraplegic standing supported by FES-controlled ankle stiffness. IEEE Trans. Neural Syst. Rehabil. Eng. 2002, 10, 239–248. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tan, J.F.; Masani, K.; Vette, A.H.; Zariffa, J.; Robinson, M.; Lynch, C.; Popovic, M.R. Inverted Pendulum Standing Apparatus for Investigating Closed-Loop Control of Ankle Joint Muscle Contractions during Functional Electrical Stimulation. Int. Sch. Res. Not. 2014, 2014, 192097. [Google Scholar] [CrossRef] [Green Version]
- Ferrarin, M.; Pavan, E.E.; Spadone, R.; Cardini, R.; Frigo, C. Standing-up exerciser based on functional electrical stimulation and body weight relief. Med. Biol. Eng. Comput. 2002, 40, 282–289. [Google Scholar] [CrossRef] [PubMed]
- Kawai, H.; Bellman, M.J.; Downey, R.J.; Dixon, W.E. Closed-Loop Position and Cadence Tracking Control for FES-Cycling Exploiting Pedal Force Direction With Antagonistic Biarticular Muscles. IEEE Trans. Control Syst. Technol. 2017, 27, 730–742. [Google Scholar] [CrossRef]
- Allen, B.C.; Cousin, C.A.; Rouse, C.A.; Dixon, W.E. Robust Cadence Tracking for Switched FES-Cycling With an Unknown Time-Varying Input Delay. IEEE Trans. Control Syst. Technol. 2022, 30, 827–834. [Google Scholar] [CrossRef]
- Rouse, C.A.; Cousin, C.A.; Allen, B.C.; Dixon, W.E. Shared control for switched motorized FES-cycling on a split-crank cycle accounting for muscle control input saturation. Automatica 2021, 123, 109294. [Google Scholar] [CrossRef]
- Rouse, C.A.; Downey, R.J.; Gregory, C.M.; Cousin, C.A.; Duenas, V.H.; Dixon, W.E. FES Cycling in Stroke: Novel Closed-Loop Algorithm Accommodates Differences in Functional Impairments. IEEE Trans. Biomed. Eng. 2020, 67, 738–749. [Google Scholar] [CrossRef]
- Duenas, V.H.; Cousin, C.A.; Ghanbari, V.; Fox, E.J.; Dixon, W.E. Torque and cadence tracking in functional electrical stimulation induced cycling using passivity-based spatial repetitive learning control. Automatica 2020, 115, 108852. [Google Scholar] [CrossRef]
- Cousin, C.A.; Duenas, V.H.; Rouse, C.A.; Bellman, M.J.; Freeborn, P.; Fox, E.J.; Dixon, W.E. Closed-Loop Cadence and Instantaneous Power Control on a Motorized Functional Electrical Stimulation Cycle. IEEE Trans. Control Syst. Technol. 2020, 28, 2276–2291. [Google Scholar] [CrossRef]
- Estay, F.I.E.; Rouse, C.A.; Cohen, M.H.; Cousin, C.A.; Dixon, W.E. Cadence and Position Tracking for Decoupled Legs during Switched Split-Crank Motorized FES-Cycling. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019. [Google Scholar]
- Cousin, C.A.; Duenas, V.H.; Rouse, C.A.; Dixon, W.E. Admittance Control of Motorized Functional Electrical Stimulation Cycle. IFAC Pap. 2019, 51, 272–277. [Google Scholar] [CrossRef]
- Ghanbari, V.; Duenas, V.H.; Antsaklis, P.J.; Dixon, W.E. Passivity-Based Iterative Learning Control for Cycling Induced by Functional Electrical Stimulation With Electric Motor Assistance. IEEE Trans. Control Syst. Technol. 2019, 27, 2287–2294. [Google Scholar] [CrossRef]
- Allen, B.C.; Stubbs, K.J.; Dixon, W.E. Position and cadence tracking of a motorized FES-cycle with an unknown time-varying input delay using saturated FES control. Automatica 2022, 139, 110176. [Google Scholar] [CrossRef]
- Sweatland, H.M.; Allen, B.C.; Greene, M.L.; Dixon, W.E. Deep Neural Network Real-Time Control of a Motorized Functional Electrical Stimulation Cycle With an Uncertain Time-Varying Electromechanical Delay. In Proceedings of the ASME 2021 International Mechanical Engineering Congress and Exposition, IMECE 2021, Virtual, Online, 1–5 November 2021. [Google Scholar]
- Yu, N.-Y.; Chen, J.-J.J.; Ju, M.S. Closed-Loop Control of Quadriceps/Hamstring Activation For FES-Induced Standing-Up Movement of Paraplegics. J. Musculoskelet. Res. 2001, 5, 173–184. [Google Scholar] [CrossRef]
- Mulder, A.J.; Veltink, P.H.; Boom, H.B.K. Optimal Control in FES-induced paraplegic standing up. In Proceedings of the IEEE International Workshop on Intelligent Control, Bogazici University, Istanbul, Turkey, 20–22 August 1990; pp. 475–478. [Google Scholar]
- Abdulla, S.C.; Tokhi, M.O. Comparative assessment of two fuzzy logic based control approaches for a flywheel and electrical clutch assist mechanism in FES cycling. In Proceedings of the 19th International Conference on Methods and Models in Automation and Robotics (MMAR), Midzyzdroje, Poland, 2–5 September 2014. [Google Scholar]
- Yahaya, S.Z.; Boudville, R.; Taib, M.N. Dynamic Modeling and Control of Wheel-chaired Elliptical Stepping Exercise. In Proceedings of the IEEE International Conference on Control System, Computing and Engineering, Penang, Malaysia, 23–25 November 2012. [Google Scholar]
- Jailani, R.; Tokhi, M.O.; Gharooni, S.C.; Jogtaei, M. Finite State Control of FES-Assisted Walking with Spring Brake Orthosis. In Proceedings of the 2011 UkSim 13th International Conference on Computer Modelling and Simulation, Cambridge, UK, 30 March–1 April 2011; pp. 183–188. [Google Scholar]
- Stanic, U.; Trnkoczy, A. Closed-Loop Positioning of Hemiplegic Patient’s Joint by Means of Functional Electrical Stimulation. IEEE Trans. Biomed. Eng. 1974, 21, 365–370. [Google Scholar] [CrossRef]
- Gaino, R.; Covacic, M.R.; Teixeira, M.C.M.; Cardim, R.; Assunção, E.; de Carvalho, A.A.; Sanches, M.A.A. Electrical stimulation tracking control for paraplegic patients using T–S fuzzy models. Fuzzy Sets Syst. 2017, 314, 1–23. [Google Scholar] [CrossRef] [Green Version]
- Vallery, H.; Stützle, T.; Buss, M.; Abel, D. Control of a Hybrid Motor Prothesis for the Knee Joint. IFAX Proc. Vol. 2005, 38, 76–81. [Google Scholar] [CrossRef] [Green Version]
- Previdi, F.; Carpanzano, E. Design of a gain scheduling controller for knee-joint angle control by using functional electrical stimulation. IEEE Trans. Control Syst. Technol. 2003, 11, 310–324. [Google Scholar] [CrossRef]
- Chengwei, G.; Qian, J. Optimized Proportional-Integral-Derivative Control Strategies and Simulation for Lower Limb Functional Electrical Stimulation. In Proceedings of the 2011 Fourth International Conference on Information and Computing, Wuhan, China, 17–18 September 2011; pp. 420–423. [Google Scholar]
- Takahashi, M.; Gouko, M.; Ito, K. Electroencephalogram (EEG) and Functional Electrical Stimulation (FES) System for Rehabilitation of Stroke Patients. In Proceedings of the 2008 21st IEEE International Symposium on Computer-Based Medical Systems, Jyväskylä, Finland, 17–19 June 2008; pp. 53–58. [Google Scholar]
- Sijobert, B.; Feuvrier, F.; Froger, J.; Guiraud, D.; Azevedo Coste, C. A sensor fusion approach for inertial sensors based 3D kinematics and pathological gait assessments: Toward an adaptive control of stimulation in post-stroke subjects. In Proceedings of the 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 18–21 July 2018. [Google Scholar]
- Quevedo, A.A.F.; Sepulveda, F.; Castro, M.C.F.; Sovi, F.X.; Nohama, P.; Cliquet, A., Jr. Development of control strategies for restoring function to paralyzed upper and lower limbs. In Proceedings of the 19th Annual Internation Conference of the IEEE Enginnering in Medicine and Biology Society, Chicago, IL, USA, 30 October–2 November 1997. [Google Scholar]
- Quintern, J.; Riener, R.; Rupprecht, S. Comparison of Simulation and Experiments of Different Closed-Loop Strategies for Functional Electrical Stimulation: Experiments in Paraplegics. Artif. Organs 1997, 21, 232–235. [Google Scholar] [CrossRef] [PubMed]
- Ferrarin, M.; D’Acquisto, E.; Mingrino, A.; Pedotti, A. An experimental pid controller for knee movement restoration with closed loop fes system. In Proceedings of the 18th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Amsterdam, The Netherlands, 31 October–3 November 1996. [Google Scholar]
- Dolan, M.J.; Andrews, B.J.; Veltink, P.H. Switching Curve Controller for FES-Assisted Standing Up and Sitting Down. IEEE Trans. Rehabil. Eng. 1998, 6, 167–171. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mulder, A.J.; Rermens, H.J.; Klomp, A.J.G.; Zilvold, G. On-Off control in FES-induced standing up. In Proceedings of the 10th Annual International Conference on IEEE Engineering in Medicine and Biology Society, New Orleans, LA, USA, 4–7 November 1988. [Google Scholar]
- Riener, R.; Boll, M.; Pavan, E.; Ferrarin, M.; Frigo, C. Neuroprosthesis for standingup and sitting down:Experimental results. In Proceedings of the First Joint BMES/EMBS Conference, Atlanta, GA, USA, 13–16 October 1999. [Google Scholar]
- Sepulveda, F.; Cliquet, A.J. An Artificial Neural System for Closed Loop Control of Locomotion Produced via Neuromuscular Electrical Stimulation. Artif. Organs 1995, 19, 231–237. [Google Scholar] [CrossRef] [PubMed]
- Pkrez-Orive, J.; Mayagoitia, R.E. A Closed-Loop Control System To Be Used With A Hybrid RGO System. In Proceedings of the 16th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Baltimore, MD, USA, 3–6 November 1994; pp. 410–411. [Google Scholar]
- Hermens, H.J.; Mulder, A.J.; Boom, H.B.K. Artificial-Reflex Stimulation To Control The Knee During Standing. In Proceedings of the 11th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Philadelphia, PA, USA, 9–12 November 1989. [Google Scholar]
- Andrews, B.J. Rule Based Control of Hybrid Fes Orthoses. IFAC Proc. Vol. 1988, 21, 287–294. [Google Scholar] [CrossRef]
- Andrews, B.J.; Baxendale, R.H.; Barnett, R.; Phillips, G.F.; Yamazaki, T.; Paul, J.P.; Freeman, P.A. Hybrid FES orthosis incorporating closed loop control and sensory feedback. J. Biomed. Eng. 1987, 10, 189–195. [Google Scholar] [CrossRef]
- Jezernik, S. The effect of stimulation frequency on the closed-loop control of quadriceps stimulation: Experimental results. IFAC Proc. Vol. 2003, 36, 151–155. [Google Scholar] [CrossRef]
- Routh, G.R.; Durfee, W.K. Doublet Stimulation to Reduce Fatigue in Electrically Stimulated Muscle During Controlled Leg Lifts. In Proceedings of the 25th Annual Intemational Conference of the IEEE EMBS, Cancun, Mexico, 17–21 September 2003. [Google Scholar]
- Durfee, W.K.; DiLorenzo, D.J. Linear and Nonlinear Approaches to Control of Single Joint Motion by Functional Electrical Stimulation. In Proceedings of the 1990 American Control Conference, San Diego, CA, USA, 23–25 May 1990. [Google Scholar]
- Wood, D.E.; Dunkerley, A.L. Controlling FES-Assisted Paraplegic Standing—A Case Study. In Proceedings of the First Joint BMES/EMBS Conference, Atlanta, GA, USA, 13–16 October 1999. [Google Scholar]
- Kamnik, R.; Poboroniuc, M.; Bajd, T.; Livint, G.L.; Lurache, D. Robot and FES Technology for Augmenting Standing-Up and Sitting-Down Capabilities. In Proceedings of the IEEE International Conference on Industrial Technology, Maribor, Slovenia, 10–12 December 2003. [Google Scholar]
- Riener, R.; Ferrarin, M.; Pavan, E.E.; Frigo, C.A. Patient-Driven Control of FES-Supported Standing Up and Sitting Down: Experimental Results. IEEE Trans. Rehabil. Eng. 2000, 8, 523–529. [Google Scholar] [CrossRef]
- Jezernik, S.; Wassink, R.G.; Keller, T. Sliding mode closed-loop control of FES: Controlling the shank movement. IEEE Trans. Biomed. Eng. 2004, 51, 263–272. [Google Scholar] [CrossRef] [Green Version]
- Previdi, F.; Schauer, T.; Savaresi, S.M.; Hunt, K.J. Data-Driven Control Design for Neuroprotheses: A Virtual Reference Feedback Tuning (VRFT) Approach. IEEE Trans. Control Syst. Technol. 2004, 12, 176–182. [Google Scholar] [CrossRef] [Green Version]
- Métrailler, P.; Blanchard, V.; Perrin, I.L.; Brodard, R.; Frischknecht, R.; Schmitt, C.; Fournier, J.; Bouri, M.; Clavel, R. Improvement of rehabilitation possibilities with the MotionMakerTM. In Proceedings of the The First IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, 2006, BioRob, Pisa, Italy, 20–22 February 2006. [Google Scholar]
- Kirsch, N.; Alibeji, N.; Fisher, L.; Gregory, C.; Sharma, N. A Semi-Active Hybrid Neuroprosthesis for Restoring Lower Limb Function in Paraplegics. In Proceedings of the 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, IL, USA, 26–30 August 2014. [Google Scholar]
- Dodson, A.; Alibeji, N.; Sharma, N. Experimental Demonstration of a DelayCompensating Controller in a Hybrid Walking Neuroprosthesis. In Proceedings of the 8th International IEEE EMBS Conference on Neural Engineering, Shanghai, China, 25–28 May 2017. [Google Scholar]
- Woods, B.; Subramanian, M.; Shafti, A.; Faisal, A. Mechanomyography based closed-loop Functional Electrical Stimulation cycling system. In Proceedings of the 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), Enschede, The Netherlands, 26–29 August 2018. [Google Scholar]
- Chen, J.-J.J.; Yu, N.-Y.; Huang, D.-G.; Ann, B.-T.; Chang, G.-C. Applying Fuzzy Logic to Control Cycling Movement Induced by Functional Electrical Stimulation. IEEE Trans. Rehabil. Eng. 1997, 5, 158–169. [Google Scholar] [CrossRef]
- Ferrante, S.; Comolli, L.; Pedrocchi, A.; Marco, M.; Ferrigno, G.; Molteni, F. Optimization of a FES cycling neuroprosthesis on stroke patients by means of the left and right crank measurements. In Proceedings of the 1st International Conference on Biomedical Electronics and Devices, BIODEVICES 2008, Funchal, Portugal, 28–31 January 2008; Volume 1, pp. 206–211. [Google Scholar]
- Vette, A.H.; Masani, K.; Popovic, M.R. Implementation of a physiologically identified PD feedback controller for regulating the active ankle torque during quiet stance. IEEE Trans. Neural Syst. Rehabil. Eng. 2007, 15, 235–243. [Google Scholar] [CrossRef] [PubMed]
- Doi, S.; Shibata, S.; Mu, S.; Miki, Y. A Portable Functional Electrical Stimulation Device for Walking Motion Modification. In Proceedings of the 2020 IEEE 9th Global Conference on Consumer Electronics (GCCE), Kobe, Japan, 13–16 October 2020. [Google Scholar]
- Itakura, N.; Fujita, K.; Kubo, K.; Iguchi, Y.; Minamitani, H. Evaluation of FES control system employing adaptive and PI controllers. In Proceedings of the Annual Conference of the IEEE/Engineering in Medicine and Biology Societ 10 Th Annual Internation Conference, New Orleans, LA, USA, 4–7 November 1988. [Google Scholar]
- Durfee, W.K.; Hausdorff, J.M. Regulating knee joint position by combining electrical stimulation with a controllable friction brake. Ann. Biomed. Eng. 1990, 18, 575–596. [Google Scholar] [CrossRef]
- Previdi, F.; Schauer, T.; Lecchini, A.; Savaresi, S.M.; Hunt, K.J. Virtual Reference Feedback Tuning For Knee Joint Position Control Using Functional Electrical Stimul Ation. In Proceedings of the European Control Conference (ECC), Porto, Portugal, 4–7 September 2001; Volume 3923–3928. [Google Scholar]
- Chen, S.C.; Luh, J.J.; Chen, Y.L.; Liu, C.L.; Yu, C.H.; Wu, H.C.; Chen, C.H.; Handa, Y.; Young, S.T.; Kuo, T.S.; et al. Development and application of a versatile FES system. J. Med. Biol. Eng. 2004, 24, 37–43. [Google Scholar]
- Braz, G.P.; Russold, M.; Davis, G.M. Functional electrical stimulation control of standing and stepping after spinal cord injury: A review of technical characteristics. Neuromodulation 2009, 12, 180–190. [Google Scholar] [CrossRef]
- Ahmed, M.; Huq, M.S.; Ibrahim, B.S.K.K. Restoration of Movement using FES: An Introductory Study I. IOP Conf. Ser. Mater. Sci. Eng. 2018, 341, 012009. [Google Scholar] [CrossRef] [Green Version]
- Poitras, I.; Dupuis, F.; Bielmann, M.; Campeau-Lecours, A.; Mercier, C.; Bouyer, L.; Roy, J.-S. Validity and Reliability of Wearable Sensors for Joint Angle Estimation: A Systematic Review. Sensors 2019, 19, 1555. [Google Scholar] [CrossRef]
- Rantanen, V.; Vehkaoja, A.; Verho, J. Stimulation Waveform Selection to Suppress Functional Electrical Stimulation Artifact from Surface EMG Signals. In Embec & Nbc; Springer: Singapore, 2018; pp. 422–425. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Sensor (n = Number of Articles) | Average Year of Publication (±SD) |
|---|---|
| Electromyography (n = 10) | 2011 (±8) * |
| Electroencephalography (n = 3) | 2016 (±7) |
| Inertial sensors (n = 17) | 2016 (±5) * |
| Conventional kinematic sensors (n = 42) | 2002 (±10) |
| Kinematic sensors for cycling (n = 13) | 2017 (±7) * |
| Kinematic sensors in hybrid orthosis (n = 13) | 2006(±12) |
| Kinetic sensors (n = 11) | 2004 (±11) |
| Simulation only (n = 26) | 2011 (±8) |
| All publications (n = 135) | 2008 (±11) |
| Type of Sensor (n = Number of Articles Between 2012 and 2022) | Number of Articles with Nonlinear Controller |
|---|---|
| Kinematic sensors for cycling (n = 11) | 8 |
| Inertial sensor (n = 14) | 4 * |
| Electromyography (n = 6) | 4 |
| Total recent articles (n = 62) | 37 |
| LLLC | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| PID | P | PI | PD | I-PD | RLC | PID-DC | VRFT | LQC | PC | FFMC |
| [23,41,73,78,80,82,112,120,121] | [14,93] | [61,146] | [82,132,147] | [146] | [41,62] | [75,82] | [137,148] | [78,115] | [19,36,50,71,114] | [138] |
| NLLLC | ||||||||||
| Identification-based control | AC-PID | RMAC | AC-LKF | RISE | NN-RISE | NN-AC | NN-PID | FLC | NN-FLC | |
| [77] | [80,132,146] | [66] | [17,40,76] | [18] | [70,79,84] | [131] | [116,149] | [22,53,54,81,88,111,113,149] | [149] | |
| Nonlinear PC | SMC | Nonlinear control with two inverse compensation units | Dynamic gradient-based control | Input-output feedback linearization control | Asynchronous stimulation technique-RISE | |||||
| [37,38,69] | [45,68,69,71,78,85,130,132,136] | [67] | [31] | [27] | [83] | |||||
| HLC | ||||||||||
| Inverse model of the identification-based control | Detection of the intention of movement by vEMG | Detection of the intention of movement by EEG | ||||||||
| [80] | [48] | [117] | ||||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chaikho, L.; Clark, E.; Raison, M. Transcutaneous Functional Electrical Stimulation Controlled by a System of Sensors for the Lower Limbs: A Systematic Review. Sensors 2022, 22, 9812. https://doi.org/10.3390/s22249812
Chaikho L, Clark E, Raison M. Transcutaneous Functional Electrical Stimulation Controlled by a System of Sensors for the Lower Limbs: A Systematic Review. Sensors. 2022; 22(24):9812. https://doi.org/10.3390/s22249812
Chicago/Turabian StyleChaikho, Layal, Elizabeth Clark, and Maxime Raison. 2022. "Transcutaneous Functional Electrical Stimulation Controlled by a System of Sensors for the Lower Limbs: A Systematic Review" Sensors 22, no. 24: 9812. https://doi.org/10.3390/s22249812