

Retrieving the Motion of Beaufort Sea Ice Using Brightness Temperature Data from FY-3D Microwave Radiometer Imager

Abstract
:1. Introduction
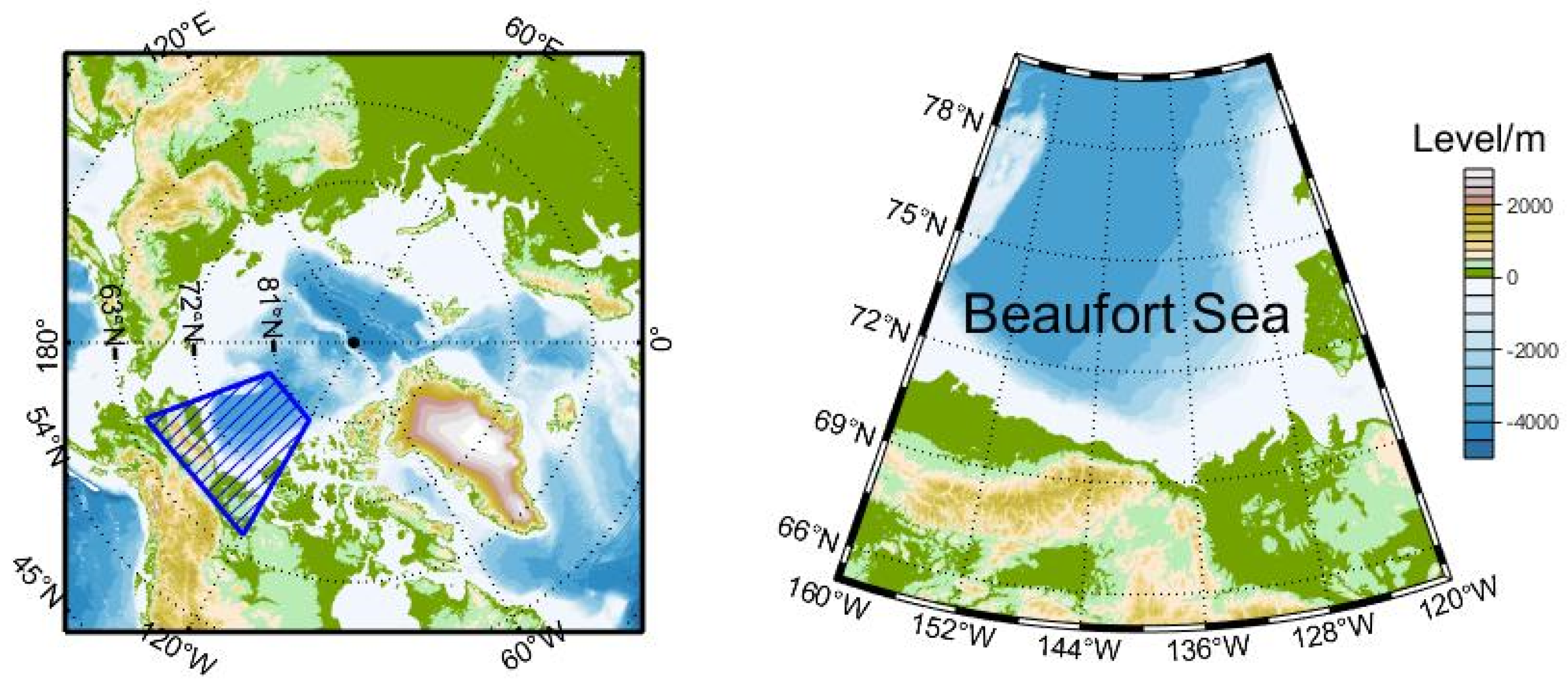
2. Materials and Methods
2.1. Data
2.1.1. FY-3D/MWRI Tb Data
2.1.2. Sea Ice Concentration Data
2.1.3. Buoy Data
2.1.4. NSIDC Sea Ice Motion Product
2.1.5. NCEP/NCAR Wind Data
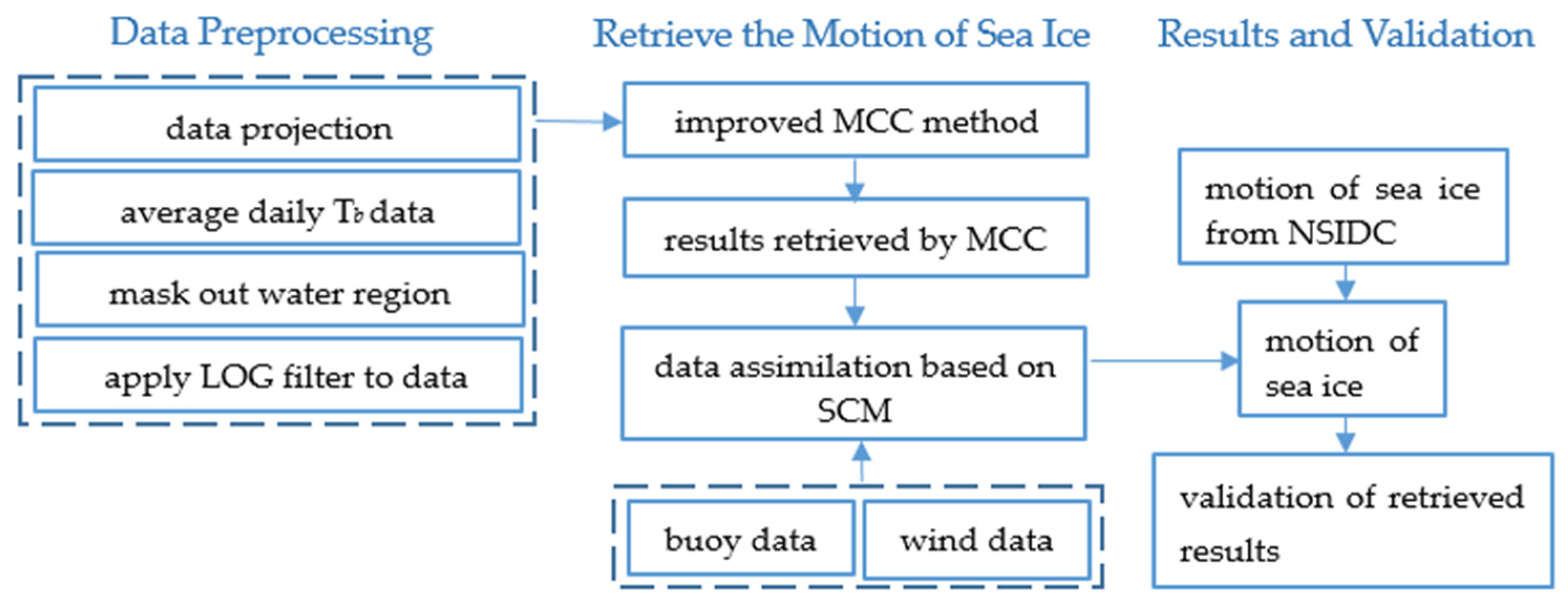
2.2. Data Preprocessing
2.3. Method to Retrieve Sea Ice Motion
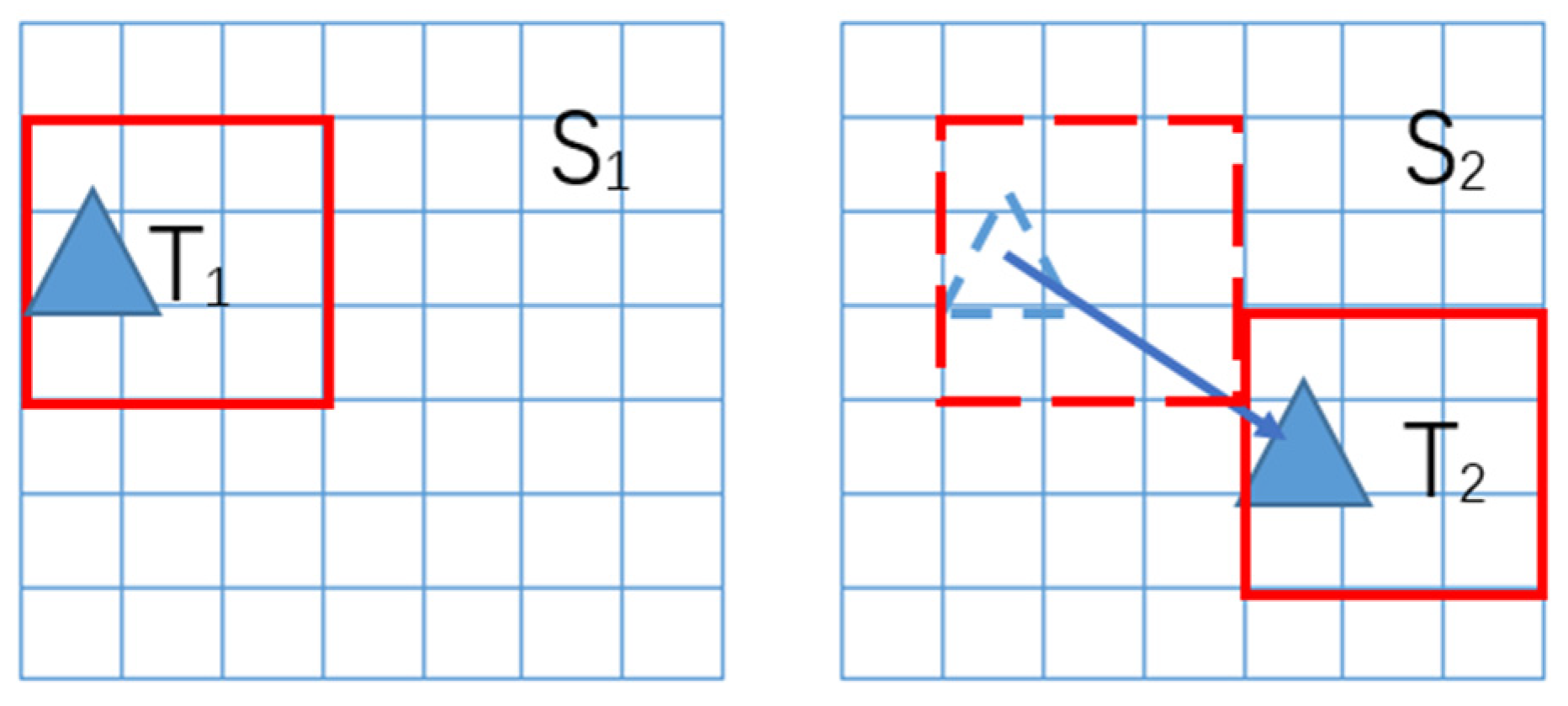
2.3.1. Improved MCC Method for Obtaining the Sea Ice Motion
2.3.2. Data Assimilation
2.3.3. Quality Assessment
3. Results
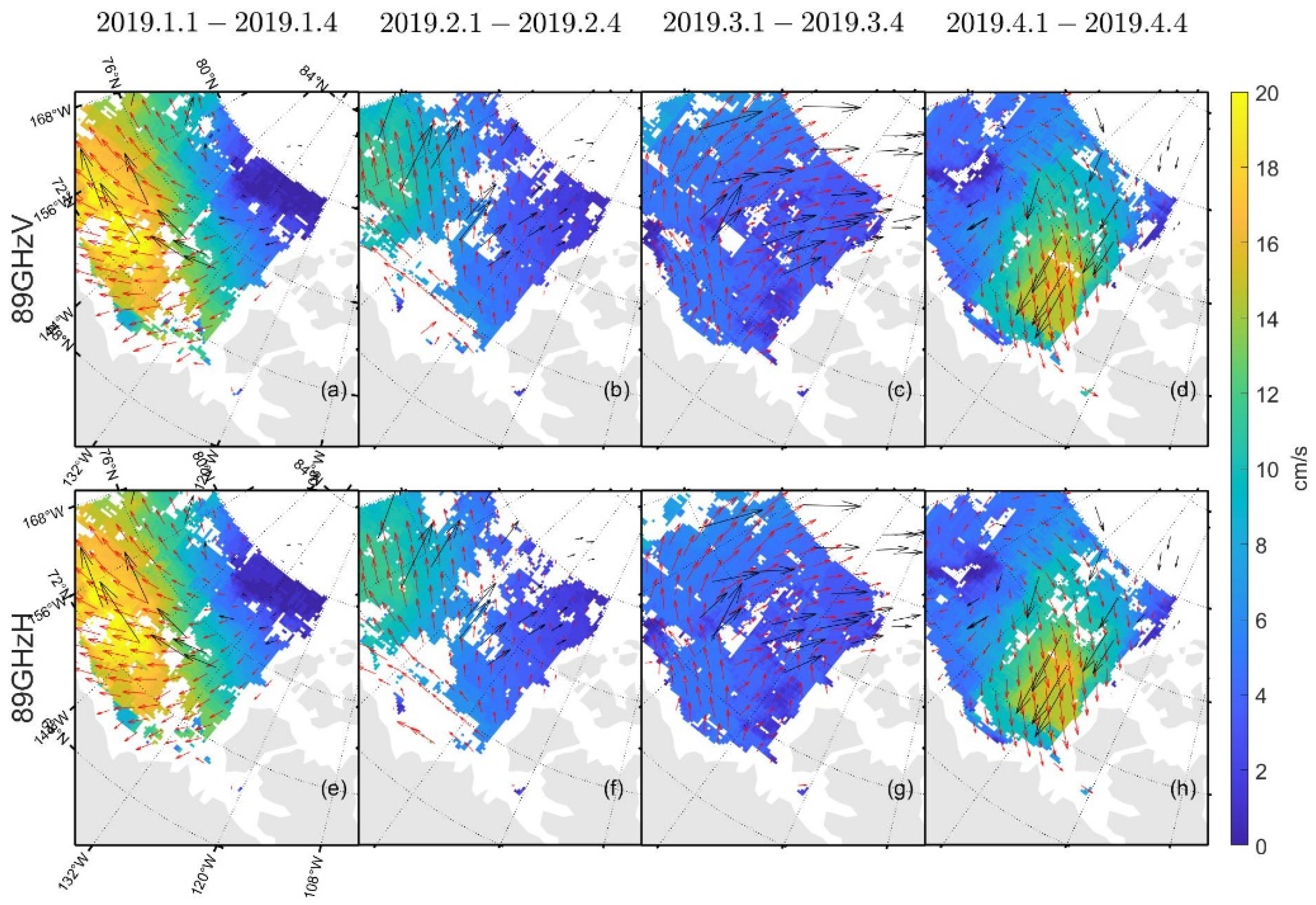
3.1. Determining the Sea Ice Motion by Using the Improved MCC Method
3.2. Assimilating Data on the Sea Ice Motion
3.3. Comparison with Data from the NSIDC Product
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Brown, P.T.; Caldeira, K. Greater future global warming inferred from Earth’s recent energy budget. Nature 2017, 552, 45–50. [Google Scholar] [CrossRef] [PubMed]
- Ceppi, P.; Gregory, J.M. Relationship of tropospheric stability to climate sensitivity and Earth’s observed radiation budget. Proc. Nat. Acad. Sci. USA 2017, 114, 13126–13131. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kwok, R.; Spreen, G.; Pang, S. Arctic sea ice circulation and drift speed: Decadal trends and ocean currents. J. Geophys. Res. Oceans 2013, 118, 2408–2425. [Google Scholar] [CrossRef]
- Gui, D. Characteristics of Sea Ice Motion and Deformation in the Arctic Using Sea Ice Motion Product. Ph.D. Thesis, Wuhan University, Wuhan, China, 2020. [Google Scholar]
- Wei, S.; Zhang, Y.; Nie, H.; Wei, H. Cause of Beaufort Sea low ice condition in the summer of 2019. Haiyang Xuebao 2022, 44, 92–101. [Google Scholar]
- Liu, S.; Li, F.; Yang, Y. Inversion of sea ice thickness variation in Beaufort Sea from 2011 to 2017 based on CryoSat-2 data. J. Geod. Geodyn. 2019, 39, 1310–1316. [Google Scholar]
- Zuo, Z.; Gao, C.; Chen, Q.; Xv, F. Preliminary analysis of kinematic characteristics of Arctic sea ice from 1979 to 2012. J. Haiyang Xuebao 2016, 38, 57–69. [Google Scholar]
- Comiso, J.; Cavalieri, D.; Markus, T. Sea ice concentration, ice temperature, and snow depth using AMSR-E data. IEEE Trans. Geosci. Remote Sens. 2003, 41, 243–252. [Google Scholar] [CrossRef]
- Iwamoto, K.; Ohshima, K.I.; Tamura, T. Improved mapping of sea ice production in the Arctic Ocean using AMSR-E thin ice thickness algorithm. J. Geophys. Res. Oceans 2014, 119, 3574–3594. [Google Scholar] [CrossRef]
- Mäkynen, M.; Similä, M. Thin ice detection in the Barents and Kara Seas using AMSR2 high-frequency radiometer data. IEEE Trans. Geosci. Remote Sens. 2019, 57, 7418–7437. [Google Scholar] [CrossRef]
- Ninnis, R.M.; Emery, W.J.; Collins, M.J. Automated extraction of pack ice motion from advanced very high resolution radiometer imagery. J. Geophys. Res. Oceans 1986, 91, 10725–10734. [Google Scholar] [CrossRef]
- Kwok, R.; Schweiger, A.; Rothrock, D.A.; Pang, S.; Kottmeier, C. Sea ice motion from satellite passive microwave imagery assessed with ERS SAR and buoy motions. J. Geophys. Res. Oceans 1998, 103, 8191–8214. [Google Scholar] [CrossRef]
- Martin, T.; Augstein, E. Large-scale drift of Arctic Sea ice retrieved from passive microwave satellite data. J. Geophys. Res. Oceans 2000, 105, 8775–8788. [Google Scholar] [CrossRef] [Green Version]
- Tschudi, M.; Meier, W.; Stewart, J. An enhancement to sea ice motion and age products at the National Snow and Ice Data Center (NSIDC). Cryosphere 2020, 14, 1519–1536. [Google Scholar] [CrossRef]
- Girard-Ardhuin, F.; Ezraty, R.; Croizé-Fillon, D.; Piolle, J. Sea Ice Drift in the Central Arctic Combining QuikSCAT and SSM/I Sea Ice Drift Data. User’s Manual, Version 3.0, French Research Institute for the Exploitation of the Seas (Ifremer). 2008. Available online: ftp://ftp.ifremer.fr/ifremer/cersat/products/gridded/psi-drift/documentation/merged.pdf (accessed on 17 February 2022).
- Lavergne, T.; Eastwood, S.; Teffah, Z.; Schyberg, H.; Breivik, L.A. Sea ice motion from low-resolution satellite sensors: An alternative method and its validation in the Arctic. J. Geophys. Res. Oceans 2010, 115, C10032. [Google Scholar] [CrossRef]
- Ezraty, R.; Girard-Ardhuin, F.; Croizé-Fillon, D. Sea ice drift in the central Arctic using the 89 GHz brightness temperature of the Advanced Microwave Scanning Radiometer—User’s manual 2.0. French Research Institute for the Exploitation of the Seas (Ifremer). 2007. Available online: Ftp://ftp.ifremer.fr/ifremer/cersat/products/gridded/psi-drift/documentation/amsr.pdf (accessed on 26 August 2022).
- Liu, A.K.; Cavalieri, D.J. On sea ice drift from the wavelet analysis of the Defense Meteorological Satellite Program (DMSP) Special Sensor Microwave Imager (SSM/I) data. Int. J. Remote Sens. 1998, 19, 1415–1423. [Google Scholar] [CrossRef]
- Kwok, R.; Curlander, J.C.; McConnell, R.; Pang, S.S. An ice-motion tracking system at the Alaska SAR facility. IEEE J. Oceanic Eng. 1990, 15, 44–54. [Google Scholar] [CrossRef]
- Muckenhuber, S.; Sandven, S. Open-source sea ice drift algorithm for Sentinel-1 SAR imagery using a combination of feature tracking and pattern matching. Cryosphere 2017, 11, 1835–1850. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Lu, X.; Zhang, M.; Li, J.; Meng, X.; Liu, G. Combined feature-tracking and pattern-matching algorithm for sea-ice drift detection. Laser Optoelectron. Prog. 2019, 56, 58–64. [Google Scholar]
- Wang, L.; He, Y.; Zhang, B.; Liu, B. Retrieval of Arctic sea ice drift using HY-2 satellite scanning microwave radiometer data. Haiyang Xuebao 2017, 39, 110–120. [Google Scholar]
- Shi, Q.; Su, J. Assessment of Arctic remote sensing ice motion products based on ice drift buoys. J. Remote Sens. 2020, 24, 867–882. [Google Scholar]
- Wang, X.; Chen, R.; Li, C.; Chen, Z.; Hui, F.; Cheng, X. An intercomparison of satellite derived Arctic sea ice motion products. Remote Sens. 2022, 14, 1261. [Google Scholar] [CrossRef]
- Wang, X.; Lei, G.; Li, L. Comparison and validation of sea ice concentration from FY-3B/MWRI and Aqua/AMSR-E observations. J. Remote Sens. 2018, 22, 723–736. [Google Scholar]
- Hao, G.; Su, J. A study of multiyear ice concentration retrieval algorithms using AMSR-E data. Acta Oceanol. Sin. 2015, 34, 102–109. [Google Scholar] [CrossRef]
- Li, L.; Chen, H.; Guan, L. Retrieval of snow depth on sea ice in the Arctic using the FengYun-3B microwave radiation imager. J. Ocean Univ. Chin. 2019, 18, 580–588. [Google Scholar] [CrossRef]
- Li, L.; Chen, H.; Wang, X.; Guan, L. Study on the Retrieval of Sea Ice Concentration from Fy3b/Mwri in the Arctic. In Proceedings of the 2019 IEEE 39th International Geoscience and Remote Sensing Symposium (IGARSS), Yokohama, Japan, 28 July–2 August 2019; pp. 4242–4245. [Google Scholar] [CrossRef]
- Tschudi, M.; Meier, W.N.; Stewart, J.S.; Fowler, C.; Maslanik, J. Polar Pathfinder Daily 25 km EASE-Grid Sea Ice Motion Vectors; Version 4. [The Arctic Region]; NASA National Snow and Ice Data Center Distributed Active Archive Center: Boulder, CO, USA, 2019. Available online: https://doi.org/10.5067/INAWUWO7QH7B (accessed on 17 February 2022). [CrossRef]
- Tang, X.; Chen, H.; Guan, L.; Li, L. Intercalibration of FY-3B/MWRI and GCOM-W1/AMSR-2 brightness temperature over the Arctic. J. Remote Sens. 2020, 24, 1032–1044. [Google Scholar]
- Kimura, N.; Wakatsuchi, M. Relationship between sea-ice motion and geostrophic wind in the northern hemisphere. J. Geophys. Res. Lett. 2000, 27, 3735–3738. [Google Scholar] [CrossRef]
- Thorndike, A.S.; Colony, R. Sea ice motion in response to geostrophic winds. J. Geophys. Res. Oceans 1982, 87, 5845–5852. [Google Scholar] [CrossRef]
- Kalnay, E.; Kanamitsu, M.; Kistler, R.; Collins, W.; Deaven, D.; Gandin, L.; Iredell, M.; Saha, S.; White, G.; Woollen, J.; et al. The NCEP/NCAR 40-Year Reanalysis Project. J.Bull. Am. Meteorol. Soc. 1996, 77, 437–472. [Google Scholar] [CrossRef]
- Kalnay, E. Atmospheric Modeling Data Assimilation and Predictability, 1st ed.; China Meteorological Press: Beijing, China, 2005; pp. 115–119. [Google Scholar]
- Bergthorsson, P.; Döös, B.R.; Fryklund, S.; Haug, O.; Lindquist, R. Routine Forecasting with the Barotropic Model. Tellus 1955, 7, 272–274. [Google Scholar] [CrossRef] [Green Version]
- Cressman, G.P. An Operational Objective Analysis System. Mon. Weather Rev. 1959, 87, 367–374. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data | Source | Spatial Resolution |
|---|---|---|
| FY-3D/MWRI Tb data | NSMC | 9 km × 15 km (89 GHz) |
| 18 km × 30 km (36.5 GHz) | ||
| Sea ice concentration data | POGOC | 12.5 km × 12.5 km |
| Buoy data | IABP | |
| Sea ice motion data product | NSIDC | 25 km × 25 km |
| NCEP/NCAR wind data | NCEP/NCAR | about 100 km × 100 km 1 |
| Frequency (GHz) | Spatial Resolution (km) | Bandwidth (MHz) | Sensitivity (K) | Polarization * |
|---|---|---|---|---|
| 36.5 | 18 × 30 | 900 | 0.5 | H/V |
| 89 | 9 × 15 | 2 × 2300 | 0.8 | H/V |
| H | V | |||
|---|---|---|---|---|
| Zonal / * | Meridional / | Zonal / | Meridional / | |
| January | 2.4266 (3.5419) | 2.9908 (4.4169) | 2.3972 (3.5194) | 2.9971 (4.4061) |
| February | 3.3967 (4.0409) | 2.9113 (3.7086) | 3.4036 (4.0444) | 2.8997 (3.6931) |
| March | 1.9316 (2.6656) | 2.9561 (4.2914) | 1.9372 (2.6595) | 2.9451 (4.2475) |
| April | 3.3281 (4.3451) | 4.0764 (5.2480) | 3.3317 (4.3552) | 3.9544 (5.1051) |
| January–April | 2.7472 (3.6763) | 3.2017 (4.4202) | 2.7392 (3.6695) | 3.1658 (4.3615) |
| H | V | |||
|---|---|---|---|---|
| Zonal / * | Meridional / | Zonal / | Meridional / | |
| January | 2.2732 (3.0348) | 3.0680 (4.4169) | 2.2668 (3.0320) | 3.1237 (4.6500) |
| February | 3.3573 (4.0050) | 2.9241 (3.7044) | 3.4065 (4.0683) | 2.9804 (3.7950) |
| March | 1.8568 (2.5713) | 2.9275 (4.1990) | 1.8389 (2.5900) | 2.8325 (4.0852) |
| April | 3.0200 (3.9662) | 3.8212 (4.9949) | 3.1476 (4.0604) | 4.0861 (5.3117) |
| January–April | 2.5793 (3.3887) | 3.1273 (4.3345) | 2.6166 (3.4415) | 3.1842 (4.4247) |
| Zonal / * | Meridional / | |
|---|---|---|
| January | 2.3136 (3.4180) | 3.1575 (4.7102) |
| February | 3.3406 (3.9833) | 2.9441 (3.7419) |
| March | 1.8334 (2.5688) | 2.8484 (4.1092) |
| April | 3.3483 (4.3538) | 4.1328 (5.3143) |
| January–April | 2.6824 (3.6159) | 3.2437 (4.4857) |
| FY-3D/MWRI | NSIDC | |||
|---|---|---|---|---|
| Zonal / * | Meridional / | Zonal / | Meridional / | |
| January | 0.6226 (1.2170) | 0.7552 (1.3285) | 0.6035 (0.8863) | 0.4560 (0.6744) |
| February | 0.7683 (1.0312) | 0.6352 (0.8305) | 0.5201 (0.6791) | 0.6184 (0.7631) |
| March | 0.5991 (0.9793) | 0.5820 (0.8219) | 0.5742 (0.7885) | 0.4567 (0.6057) |
| April | 0.9163 (1.3123) | 0.7335 (1.0797) | 0.6630 (0.8909) | 0.4648 (0.6383) |
| January–April | 0.7166 (1.1418) | 0.6777 (1.0481) | 0.6576 (0.9515) | 0.4922 (0.6700) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ni, K.; Chen, H.; Li, L.; Meng, X. Retrieving the Motion of Beaufort Sea Ice Using Brightness Temperature Data from FY-3D Microwave Radiometer Imager. Sensors 2022, 22, 8298. https://doi.org/10.3390/s22218298
Ni K, Chen H, Li L, Meng X. Retrieving the Motion of Beaufort Sea Ice Using Brightness Temperature Data from FY-3D Microwave Radiometer Imager. Sensors. 2022; 22(21):8298. https://doi.org/10.3390/s22218298
Chicago/Turabian StyleNi, Kun, Haihua Chen, Lele Li, and Xin Meng. 2022. "Retrieving the Motion of Beaufort Sea Ice Using Brightness Temperature Data from FY-3D Microwave Radiometer Imager" Sensors 22, no. 21: 8298. https://doi.org/10.3390/s22218298