
Scaled Sea Surface Design and RCS Measurement Based on Rough Film Medium


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
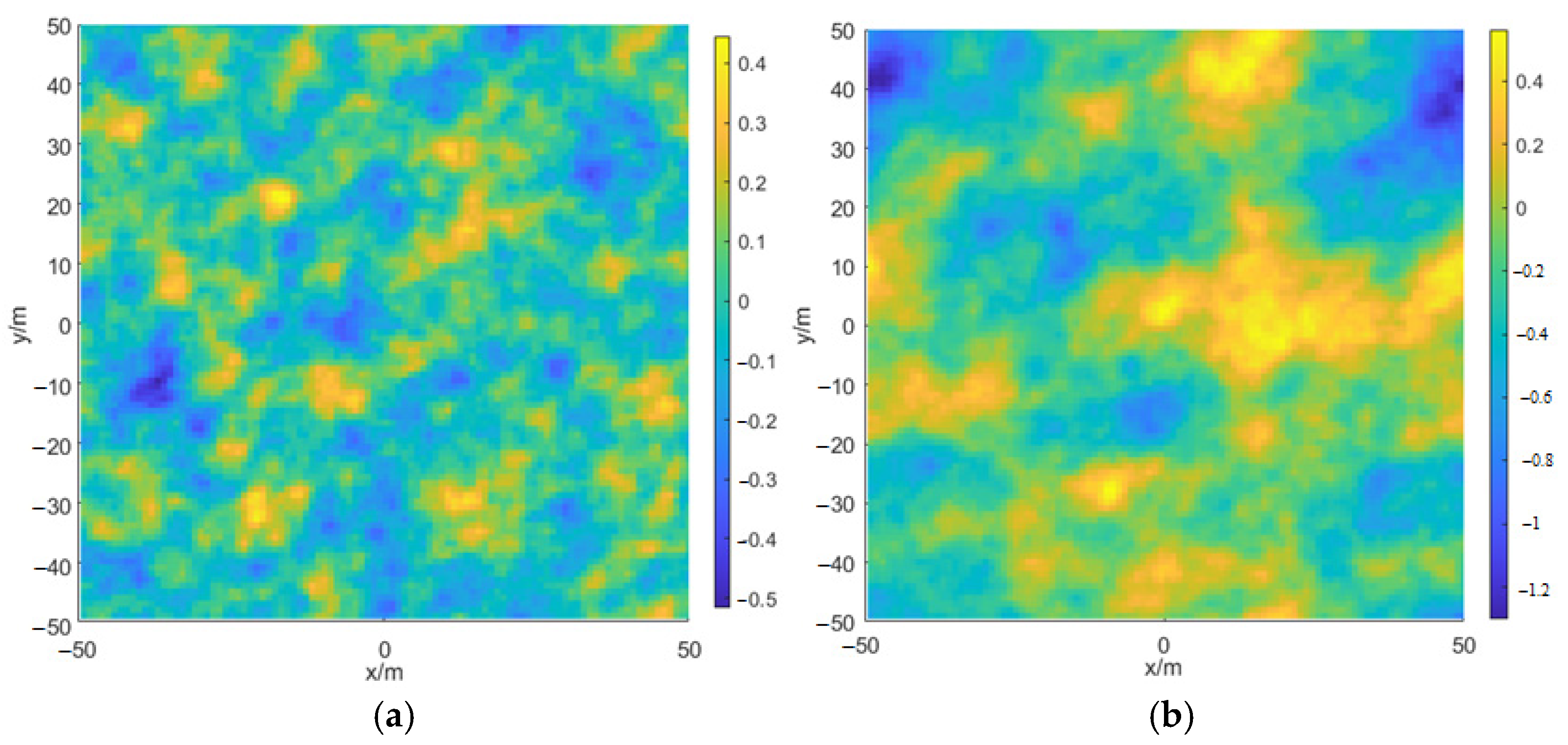
2. Scaling Principle for Rough Sea Surface Scattering
2.1. The Scaling Principle for Scaled Sea Surface Using Rough Thin-Film Media
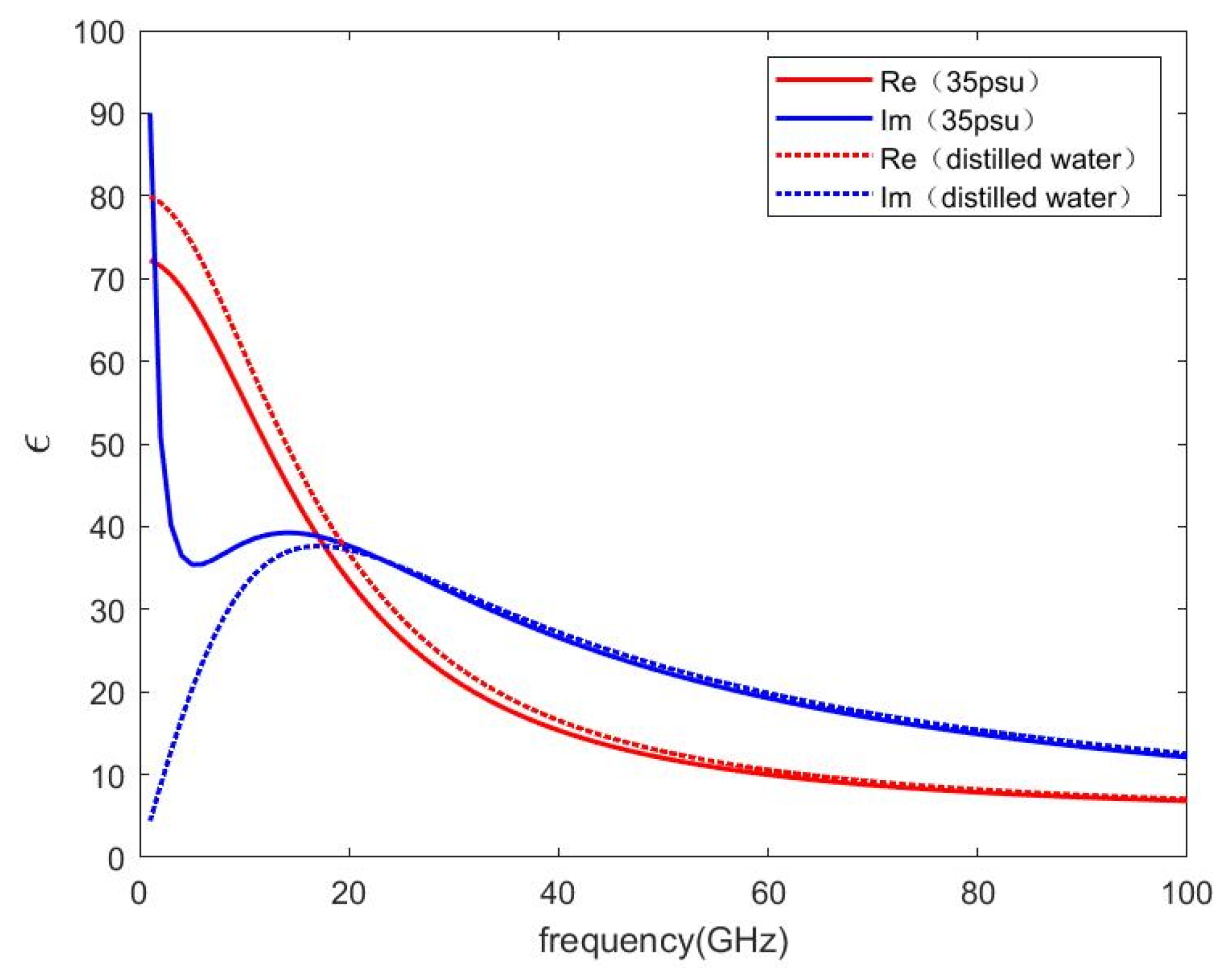
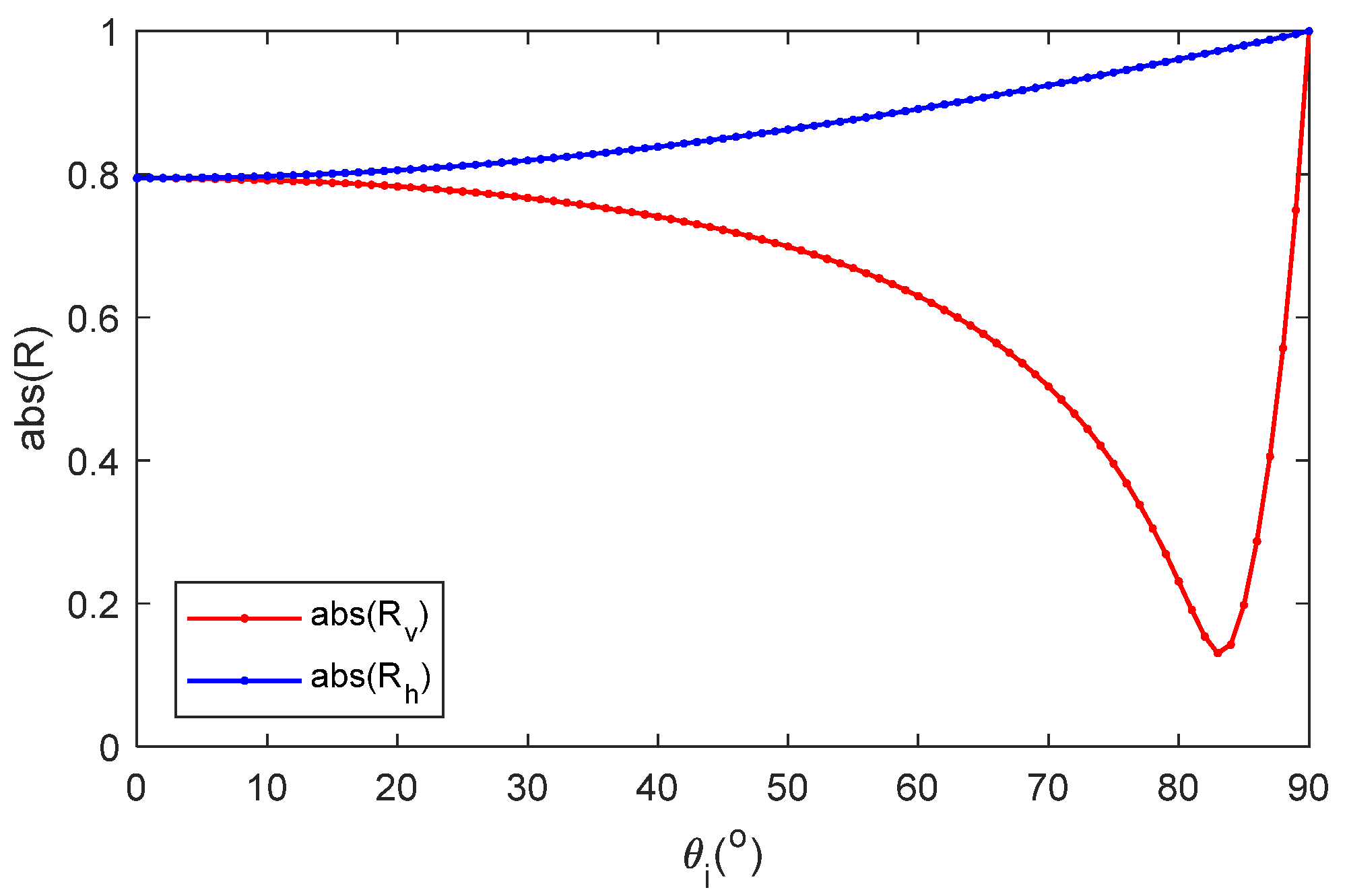
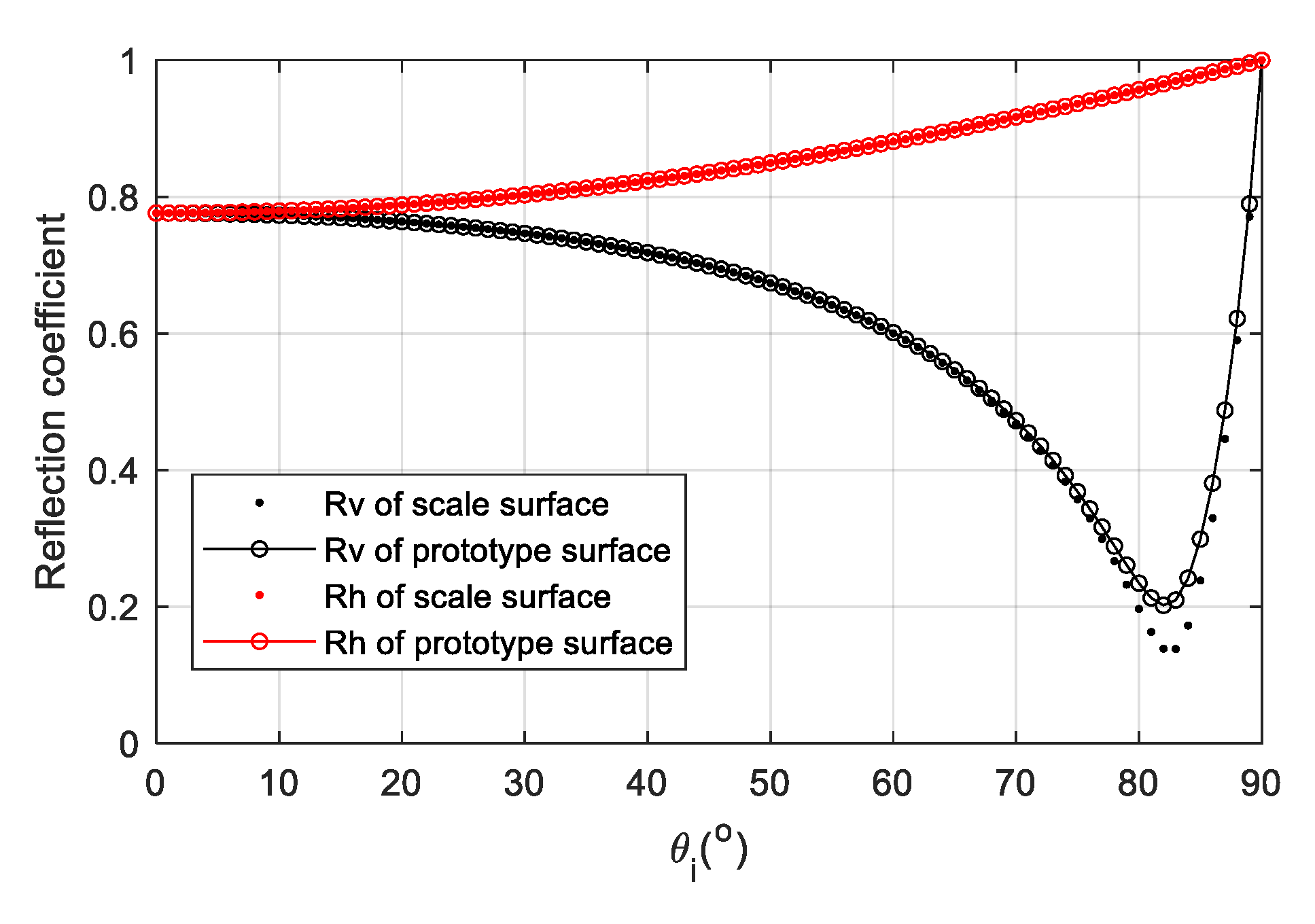
2.2. Reflection Coefficients of Seawater
3. Design and Manufacture of Scaled Sea Surface
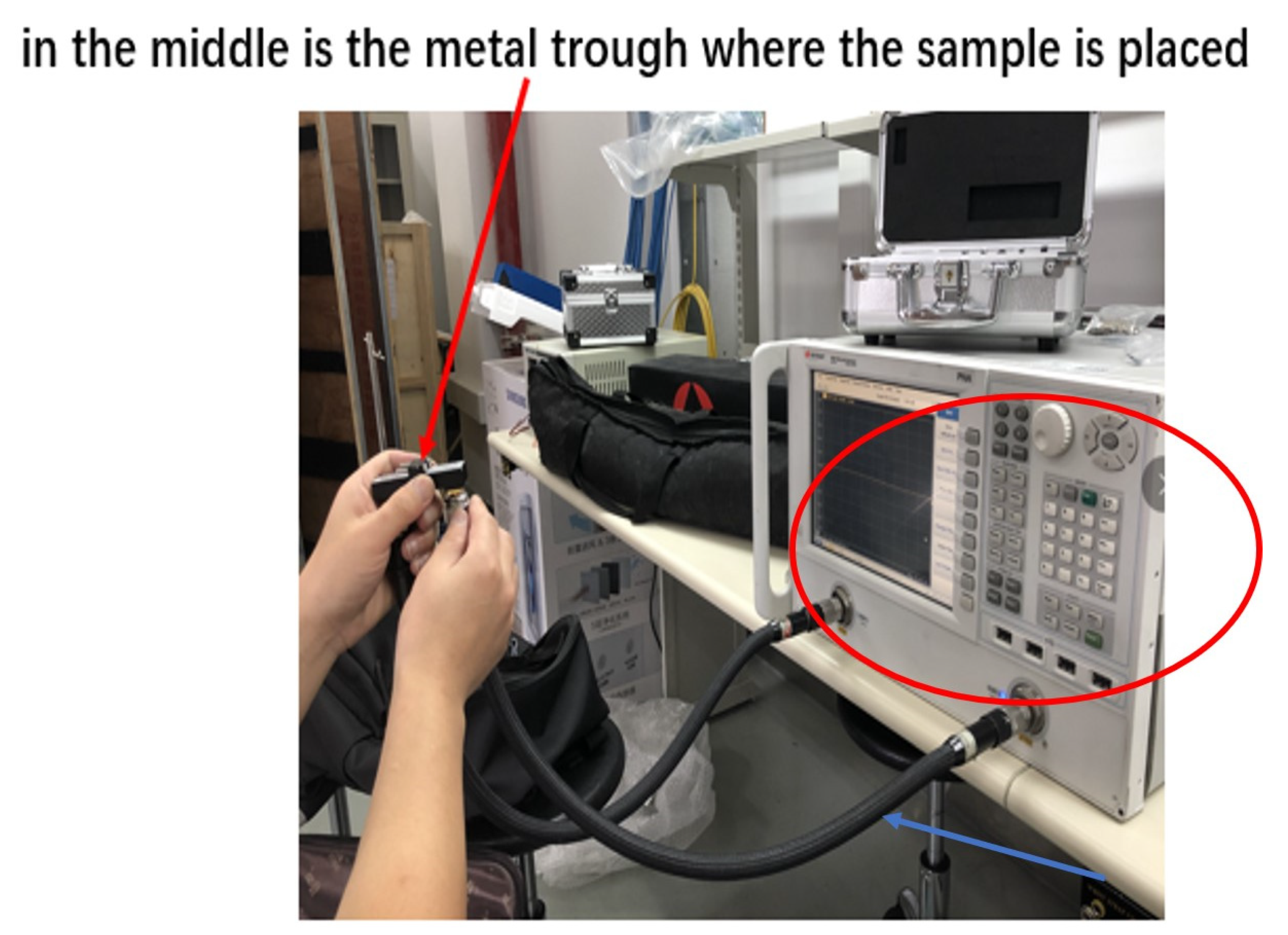
3.1. Permittivity Measurement Based on the Waveguide Method
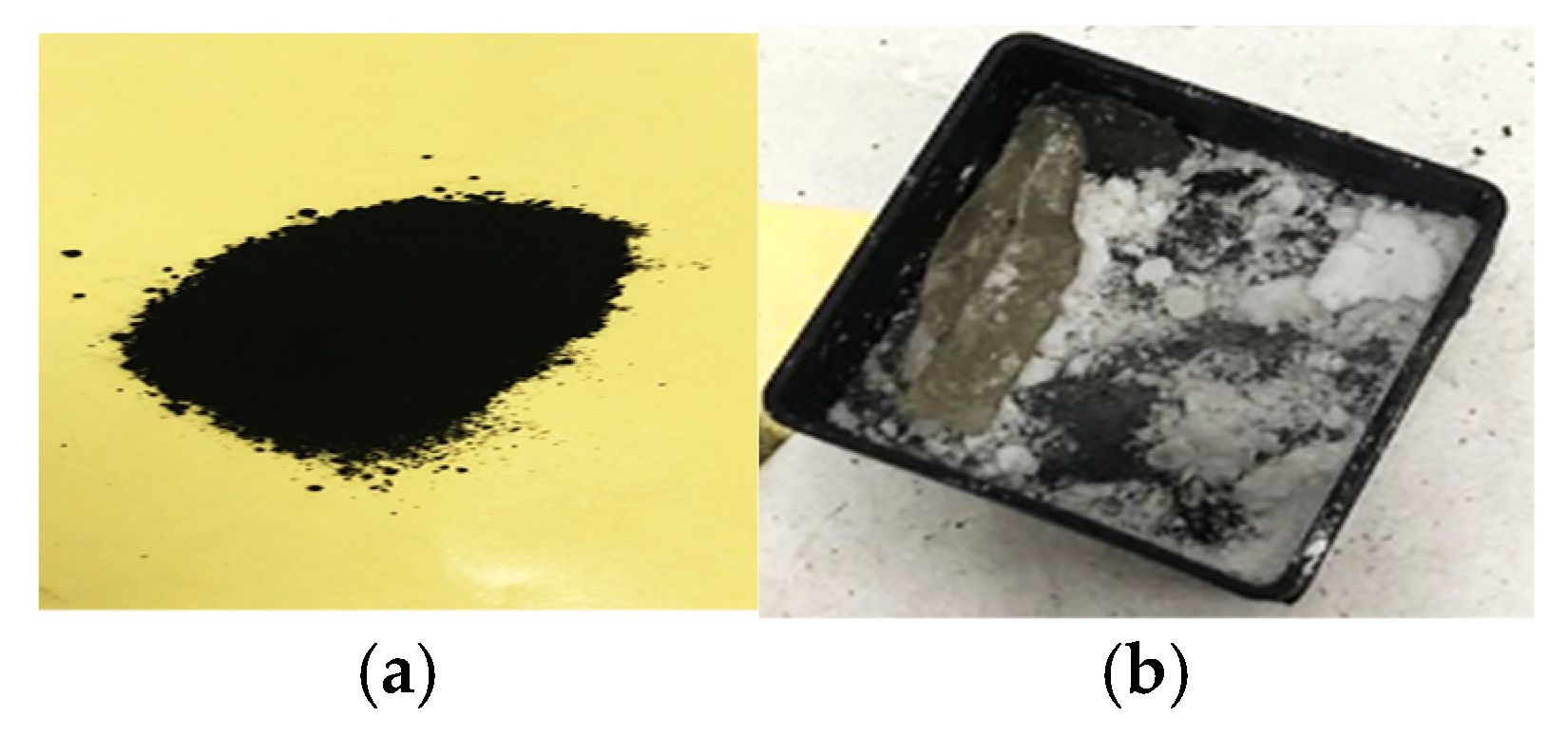
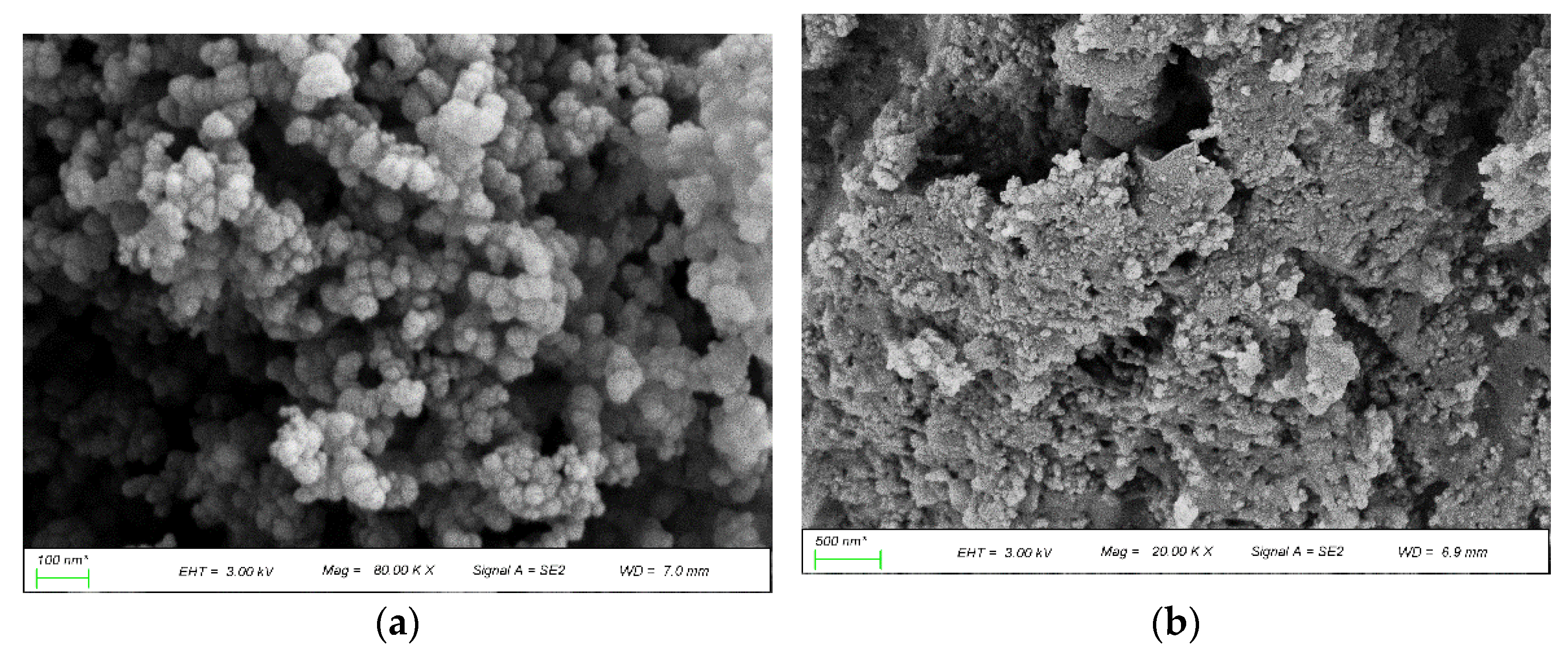
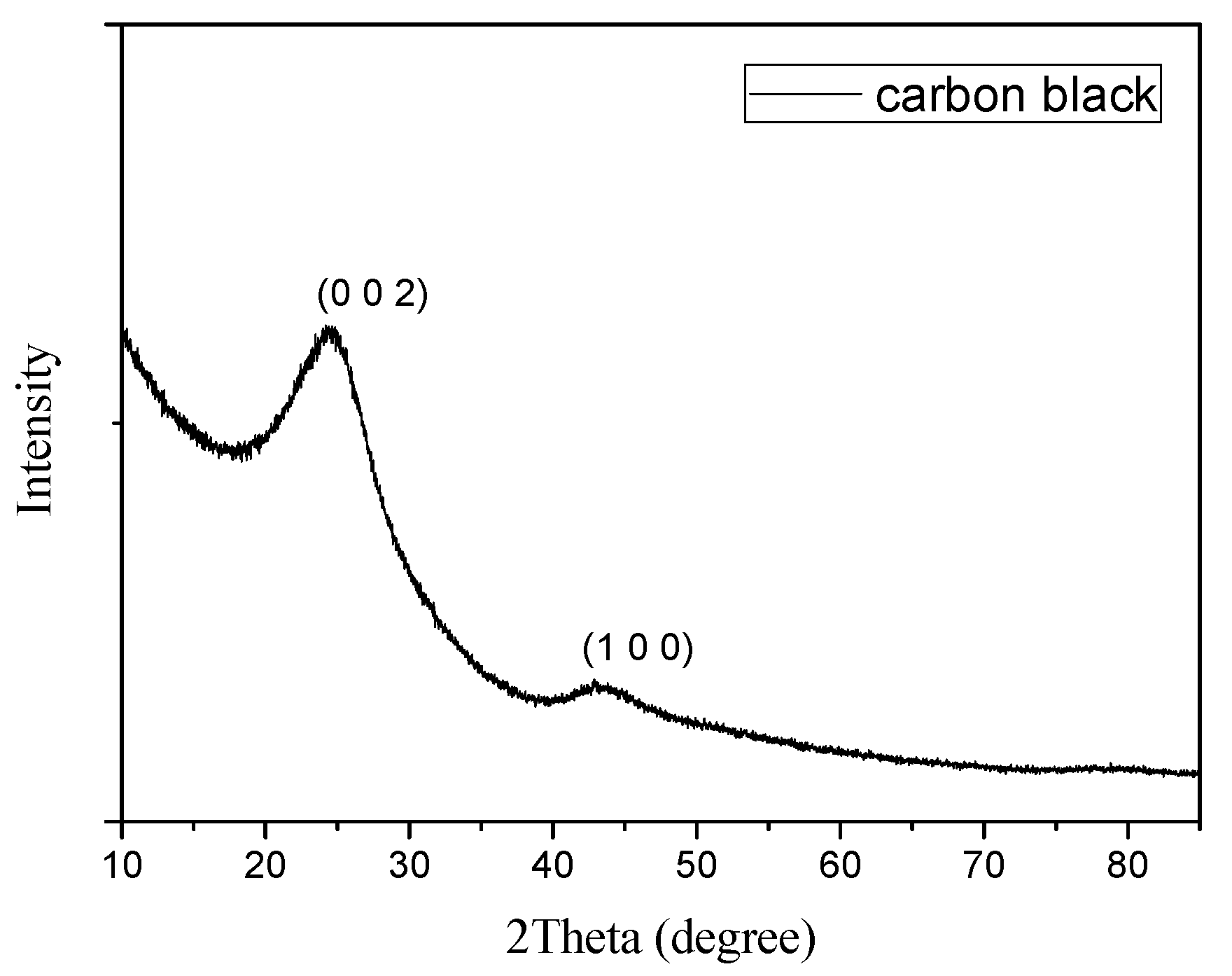
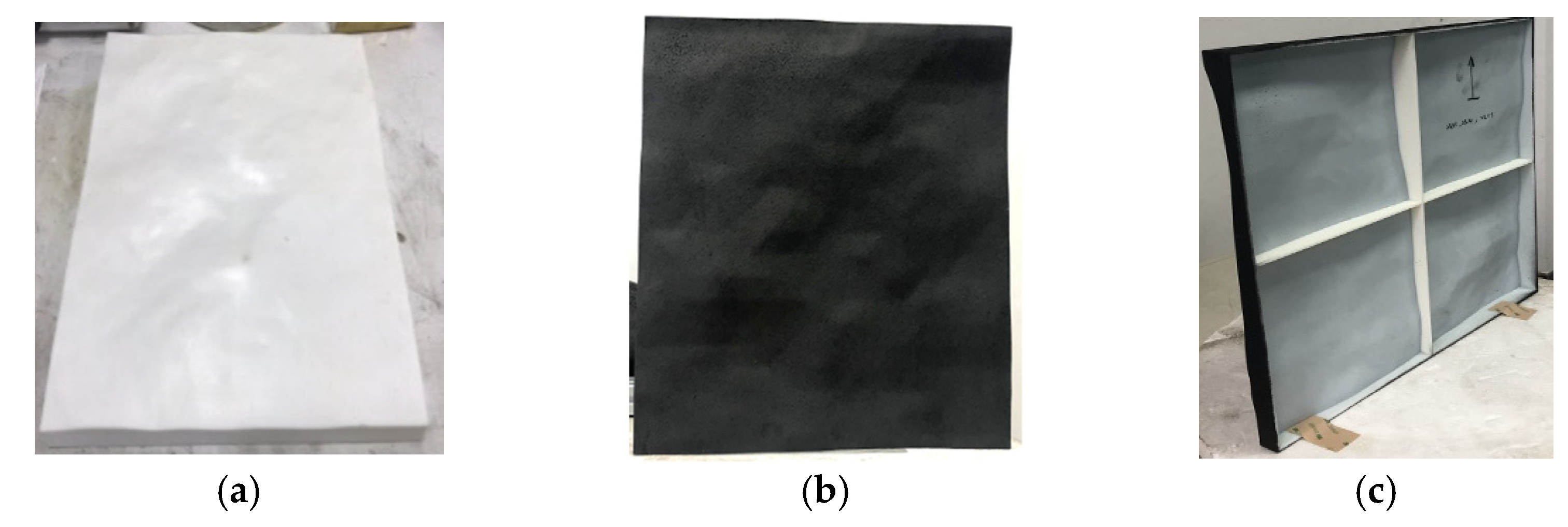
3.2. Preparation of the Surface Material for Simulating a Rough Sea Surface
- (a)
- Weigh two parts of paraffin with a mass of 1 g. Then, weigh the carbon black with a mass of 0.75 g and 0.95 g, which corresponds to the volume ratio of 25% or 30% in the mixed material, respectively.
- (b)
- Pour the weighed paraffin into the small beaker and heat it on the heating table. After the paraffin dissolves, the carbon black is timely poured into the small beaker and stirred. During mixing, the small beaker shall not leave the heating table to prevent the mixed materials from curing rapidly, resulting in uneven mixed materials. Then, the mixed material is solidified quickly.
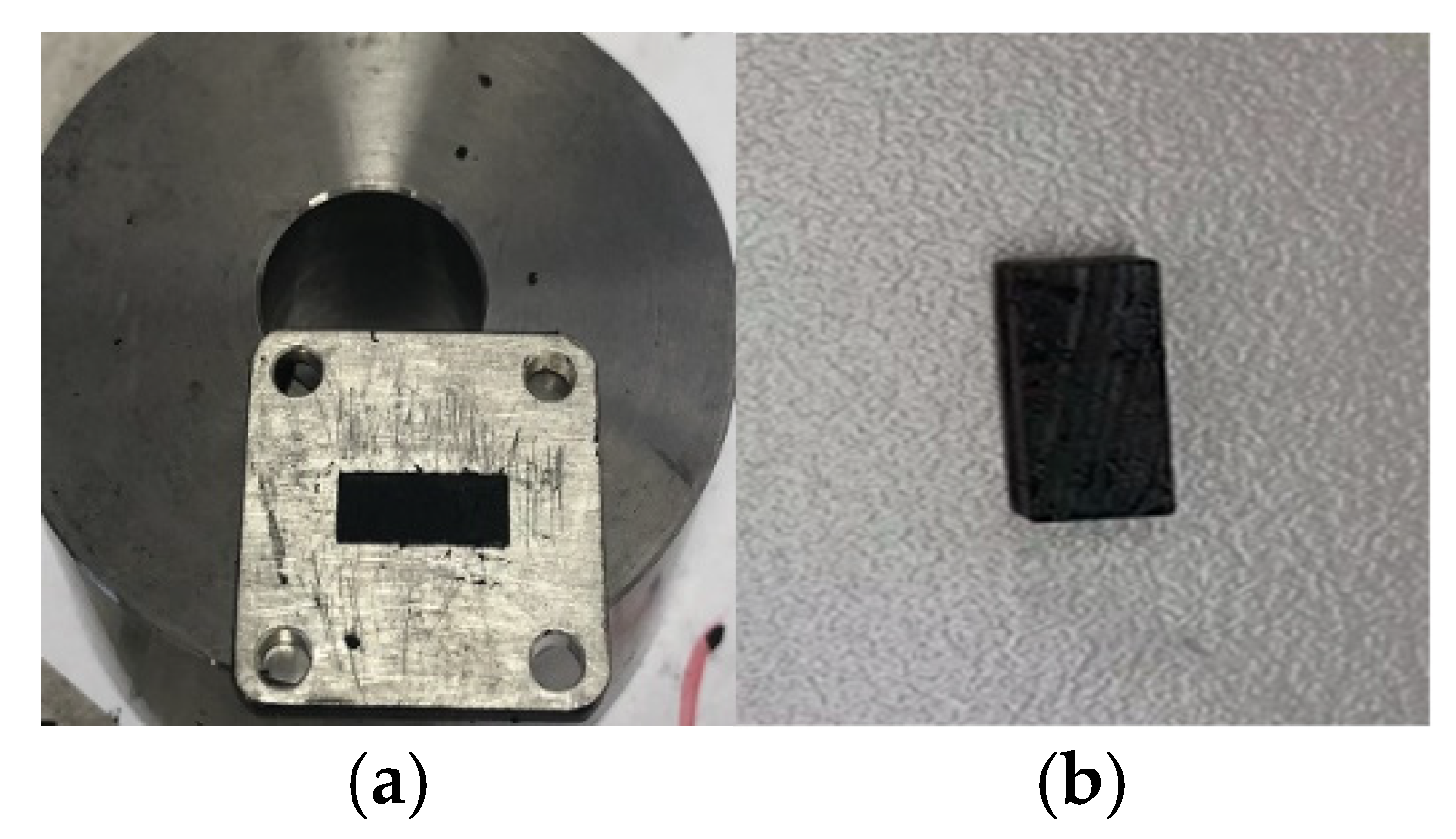
- (c)
- An appropriate amount of evenly mixed material is poured into the metal groove on the heating table. The thickness of the metal groove is 2.22 mm, so the thickness of the final measured sample is also 2.22 mm. When the mixture fills the metal groove evenly, a rectangular sample is cut with a blade, as shown in Figure 6.
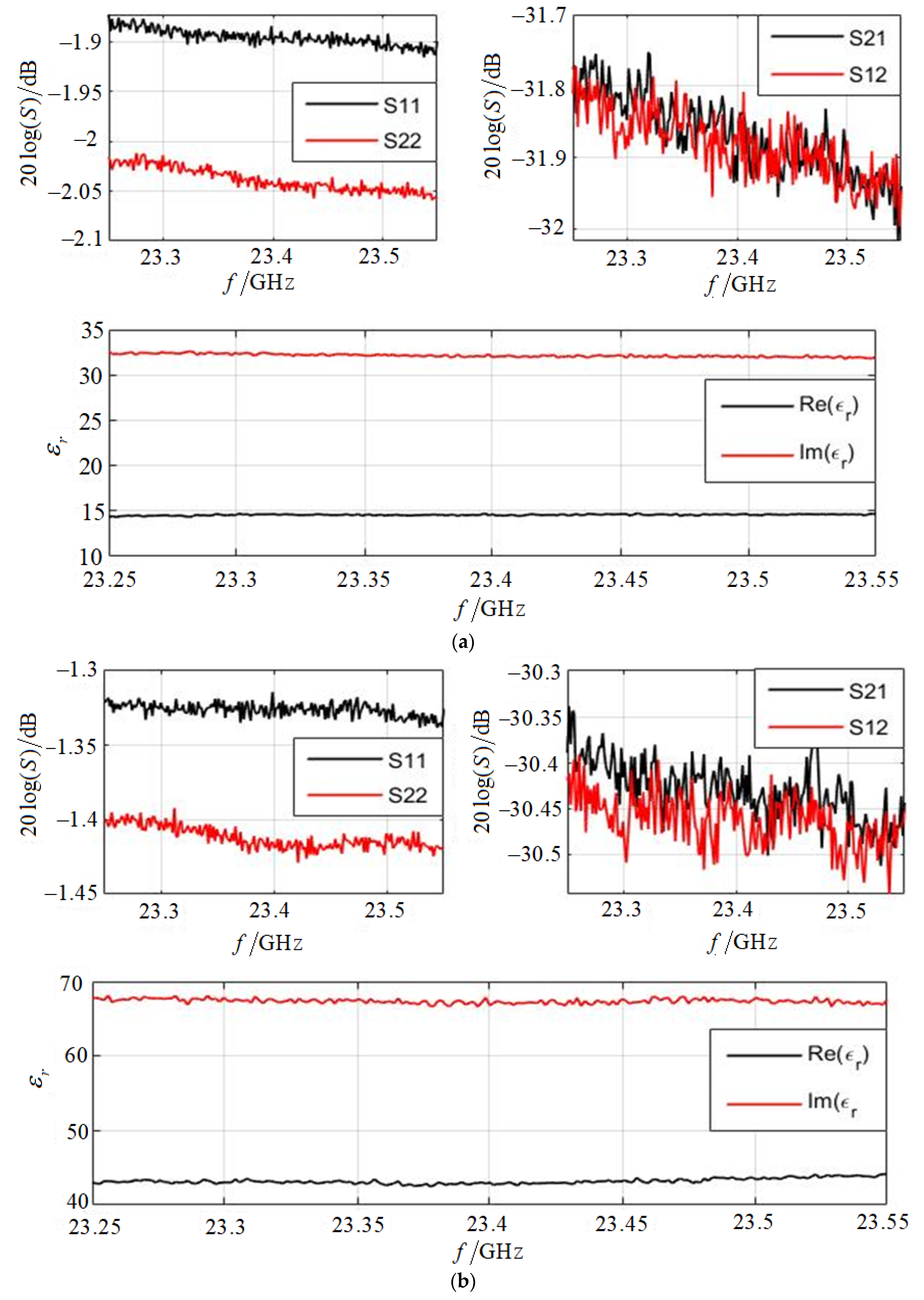
3.3. Measurement Data of Scattering Parameters and Inversion of Permittivity
3.4. Optimization of Permittivity of the Rough Film
- (1)
- Initialization of population size, crossover probability, mutation probability, and iteration number. The random function is used to generate 0 or 1, and a single population is binary coded to generate the initial population. The coding length is related to the scale of the volume ratio and its discrete precision. Here, the discrete precision is set as 1%.
- (2)
- Electromagnetic parameter fitting calculation. The spline interpolation method is used to calculate the equivalent electromagnetic parameters (complex relative dielectric constant) of each proportion of mixed scaled materials.
- (3)
- Calculate the fitness of each individual in the population according to the optimization function in Equation (9). Judge the termination conditions so that the optimization function is greater than the set parameter (it is set as 80 in this paper) according to the individual with the largest fitness in the population. If so, the calculation ends, otherwise go to the next step.
- (4)
- Copy the binary code of the old group to obtain the new group according to the crossing probability and crossing point.
- (5)
- Select appropriate chromosomes (referring to the binary code of a single individual) to participate in the crossover according to the crossover probability and crossover point. The original chromosome is replaced with the generated new chromosome.
- (6)
- Randomly select some genes to participate in mutation according to the mutation probability (that is, their binary code changes from 0 to 1 or from 1 to 0). With this operation, a new population is obtained again.
- (7)
- Steps 4–6 generate the new generation population. Calculate the fitness of the new generation population, and compare it with the previous population. If the fitness of the new population is greater than that of the previous population, go to step 3 with the new population. Otherwise, the new population will be eliminated and the previous population will be used to transfer to Step 3.
3.5. Physical Preparation of the Rough Sea Surface Model
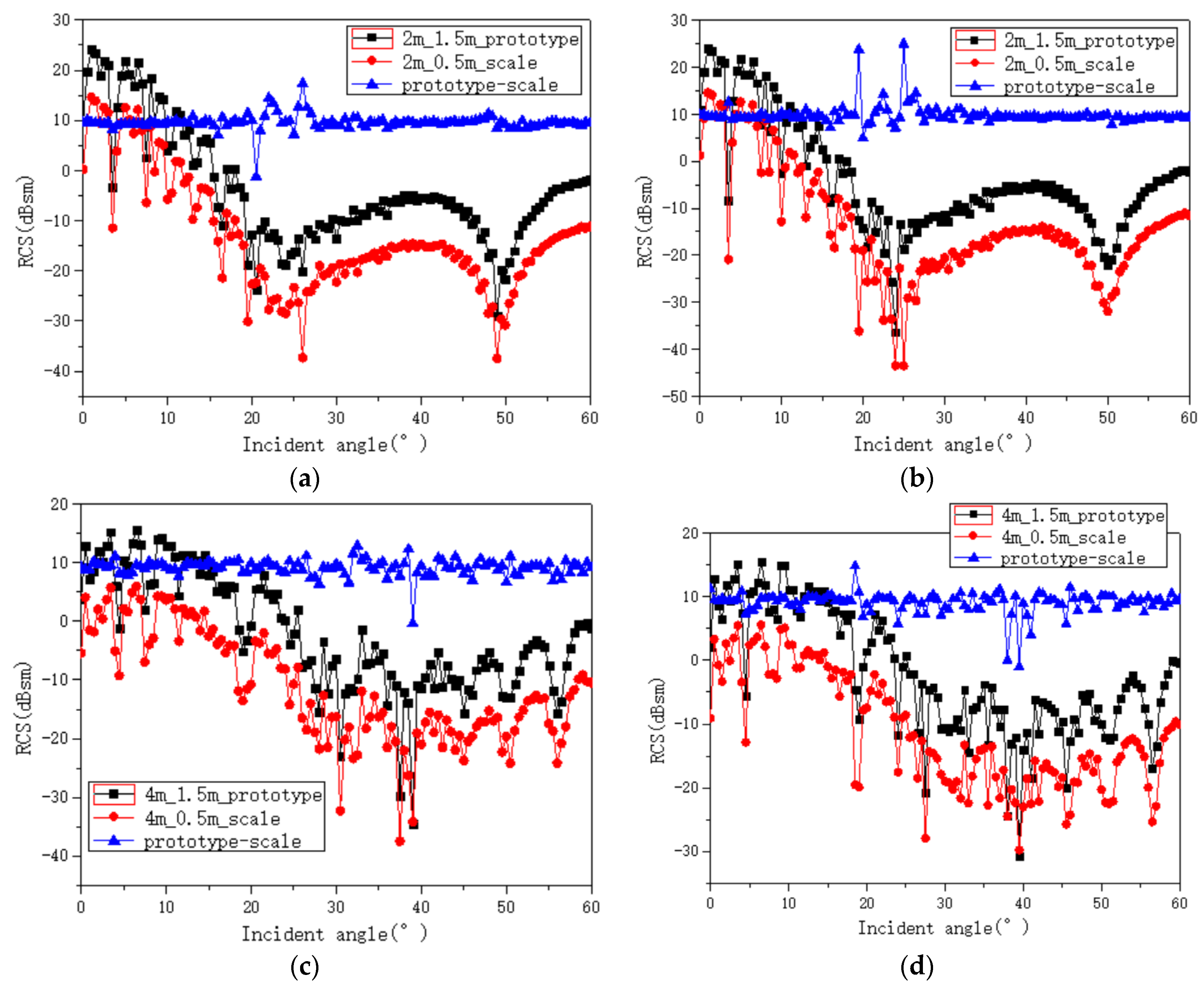
4. Comparison of the RCS between the Prototype and Scaled Sea Surfaces
4.1. RCS Simulation of the Rough Sea Surface
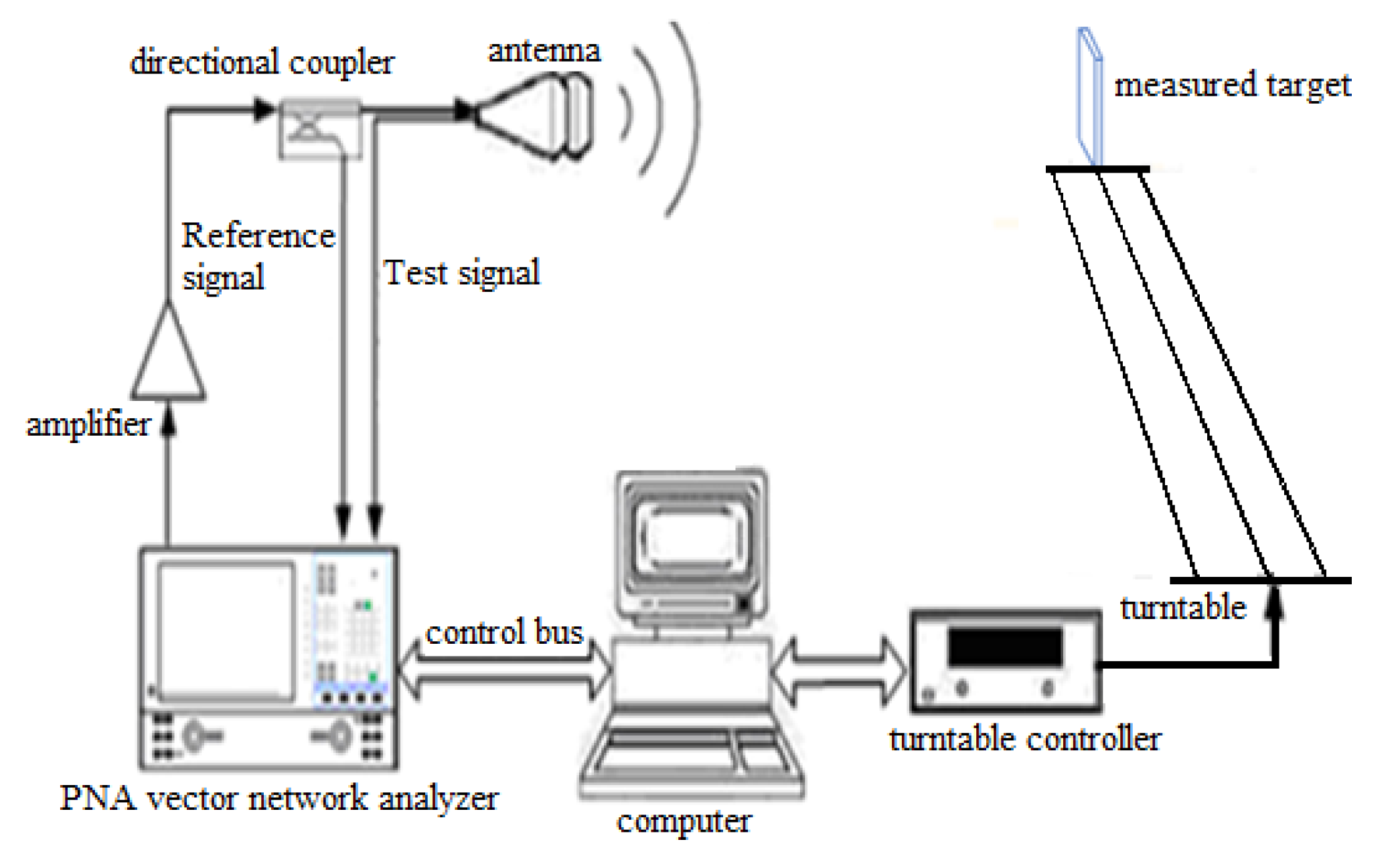
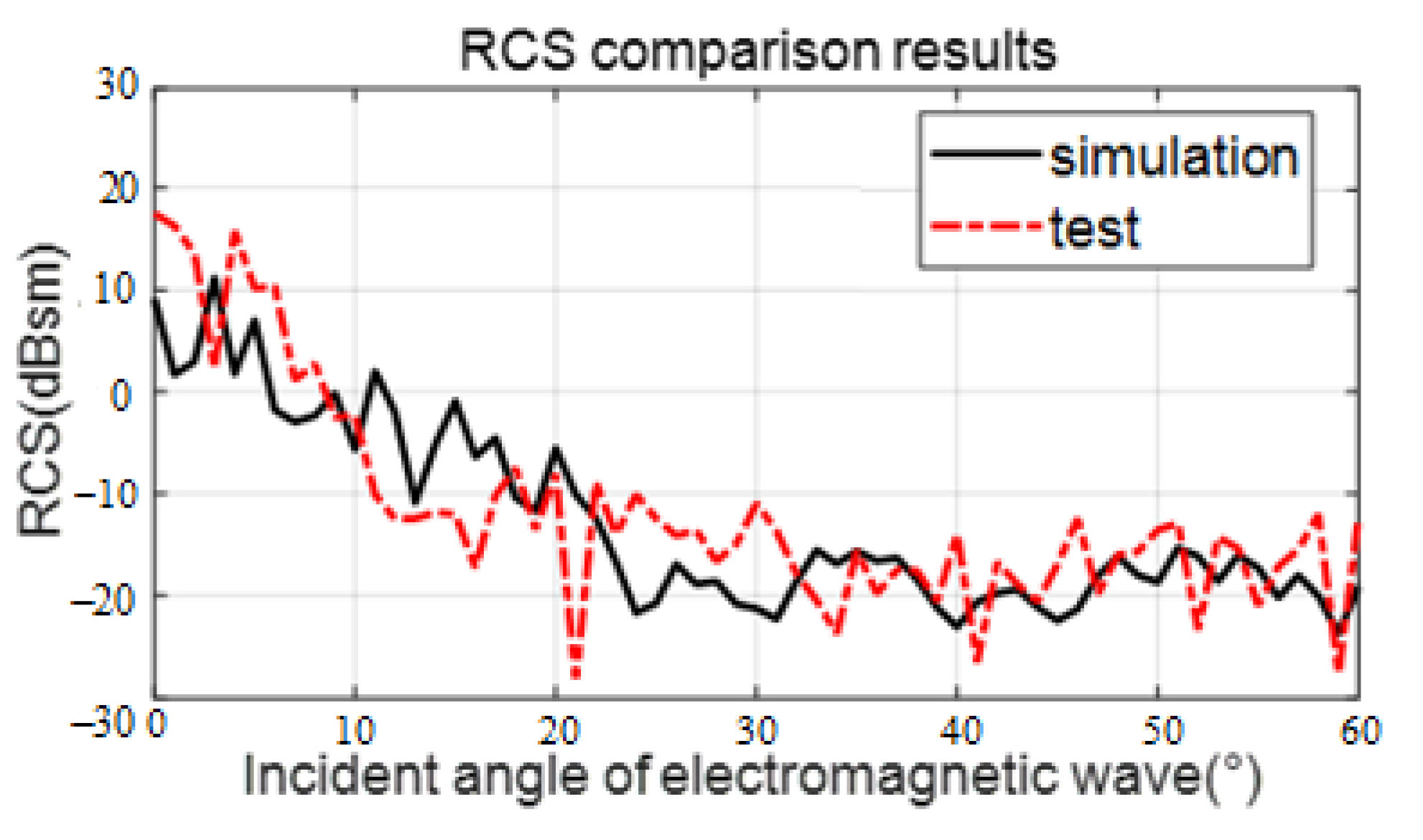
4.2. Measurement of the Scaled Rough Sea Surface
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Li, J.; Guo, L.X.; Zeng, H. FDTD investigation on the electromagnetic scattering from a target above a randomly rough sea surface. Waves Random Complex Media 2008, 18, 641–650. [Google Scholar] [CrossRef]
- Simon, H.Y.; Julian, C. Sea Surface Salinity and Wind Retrieval Using Combined Passive and Active L-Band Microwave Observations. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1022–1032. [Google Scholar]
- Fore, A.G.; Yueh, S.H.; Tang, W.; Stiles, B.W.; Hayashi, A.K. Combined Active/Passive Retrievals of Ocean Vector Wind and Sea Surface Salinity With SMAP. IEEE Trans. Geosci. Remote Sens. 2016, 54, 7396–7404. [Google Scholar] [CrossRef]
- Hong, S.; Shin, I. Wind Speed Retrieval Based on Sea Surface Roughness Measurements from Spaceborne Microwave Radiometers. J. Appl. Meteorol. Climatol. 2013, 52, 507–516. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, M.; Chen, H. The EM Scattering of Electrically Large Dielectric Rough Sea Surface at 240 GHz Using a Scale Model. IEEE Trans. Antennas Propag. 2012, 60, 5890–5899. [Google Scholar] [CrossRef]
- Toporkov, J.V.; Brown, G.S. Numerical simulations of scattering from time-varying, randomly rough surfaces. IEEE Trans. Geosci. Remote Sens. 2000, 38, 1616–1625. [Google Scholar] [CrossRef]
- Chatzigeorgiadis, F. Development of Code for a Physical Optics Radar cross Section Prediction and Analysis Application. Master’s Thesis, NAVAL Postgraduate School, Monterey, CA, USA, 2004. [Google Scholar]
- Yu, D.F.; He, S.Y.; Chen, H.T.; Zhu, G.Q. Research on the electromagnetic scattering of 3D target coated with anisotropic medium using impedance boundary condition. J. Electron. Inf. Technol. 2011, 33, 458–462. [Google Scholar] [CrossRef]
- Hess, D.W. Introduction to RCS measurements. In Proceedings of the Antennas and Propagation Conference IEEE, Loughborough, UK, 17–18 March 2008. [Google Scholar]
- Pan, W.; Huang, C.; Chen, P.; Ma, X.; Hu, C.; Luo, X. A low-RCS and high-gain partially reflecting surface antenna. IEEE Trans. Antennas Propag. 2014, 62, 945–949. [Google Scholar] [CrossRef]
- Fang, C.; Chen, Y.; Xu, Y.; Hua, L. The analysis of change factor of the simulation of the bistatic quantum radar cross section for the typical ship structure. In Proceedings of the 2018 IEEE Asia-Pacific Conference on Antennas and Propagation (APCAP), Auckland, New Zealand, 5–8 August 2018; pp. 190–193. [Google Scholar]
- Gatesman, A.J.; Goyette, T.M.; Dickinson, J.C. Polarimetric Backscattering Behavior of Ground Clutter at X, Ka, and W-band. In Proceedings of the Algorithms for Synthetic Aperture Radar Imagery XII, Orlando, FL, USA, 28–31 March 2005; pp. 428–439. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.; Yuan, L.; Gao, W.; Wang, X.; Liang, Z.; Liao, Y. Wide band design on the scaled absorbing material flled with flaky CIPs. J. Phys. D Appl. Phys. 2018, 51, 065004. [Google Scholar] [CrossRef]
- Yuan, L.; Xu, Y.; Gao, W.; Dai, F.; Wu, Q. Design of scale model of plate-shaped absorber in a wide frequency range. Chin. Phys. B 2018, 27, 044101. [Google Scholar] [CrossRef]
- Meissner, T.; Wentz, F.J. The complex dielectric constant of pure and sea water from microwave satellite observations. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1836–1849. [Google Scholar] [CrossRef] [Green Version]
- Tsang, L.; Kong, J.A.; Ding, K.H.; Ao, C.O. Scattering of Electromagnetic Waves: Numerical Simulations; Wiley: New York, NY, USA, 2001. [Google Scholar]
- Wang, F.; Yang, X.; Liu, X.; Niu, T.; Wang, J.; Mei, Z.; Jian, Y. Design of an ultra-thin absorption layer with magnetic materials based on genetic algorithm at the S band. J. Magn. Magn. Mater. 2018, 451, 770–773. [Google Scholar] [CrossRef]
- Zhou, Y.; Lang, R.H.; Dinnat, E.P.; Le Vine, D.M. Seawater Debye Model Function at L-Band and Its Impact on Salinity Retrieval from Aquarius Satellite Data. IEEE Trans. Geosci. Remote Sens. 2021, 59, 8103–8116. [Google Scholar] [CrossRef]
- Klein, L.; Swift, C. An improved model for the dielectric constant of sea water at microwave frequencies. IEEE Trans. Geosci. Remote Sens. 1977, 25, 104–111. [Google Scholar]
- Meissner, T.; Wentz, F.J.; Ricciardulli, L. The emission and scattering of L-band microwave radiation from rough ocean surfaces and wind speed measurements from the Aquarius sensor. J. Geophys. Res. Ocean. 2015, 119, 6499–6522. [Google Scholar] [CrossRef]
- Liao, S.; Gao, B.; Tong, L.; Yang, X.; Li, Y.; Li, M. Measuring complex permittivity of soils by waveguide transmission/reflection method. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 14 November 2019; pp. 7144–7147. [Google Scholar]
- Hong, S.S.; Lee, W.; Han, M.M. The feature selection method based on genetic algorithm for efficient of text clustering and text classification. Int. J. Adv. Comput. Sci. Appl. 2015, 7, 2074–8523. [Google Scholar]
- Jang, S.H.; Kim, T.Y.; Kim, J.K.; Lee, J.S. The Study of Genetic Algorithm-based Task Scheduling for Cloud Computing. Int. J. Control. Autom. 2012, 5, 157–162. [Google Scholar]
- Dhodhi, M.K.; Ahmad, I.; Ahmad, I. A multiprocessor scheduling scheme using problem-space genetic algorithms. In Proceedings of the IEEE International Conference on Evolutionary Computation, Perth, WA, Australia, 29 November–1 December 1995; pp. 214–219. [Google Scholar]
- Durden, S.; Vesecky, J. A physical radar cross-section model for a wind-driven sea with swell. IEEE J. Ocean. Eng. 1985, 10, 445–451. [Google Scholar] [CrossRef]
- Berman, B. 3-D printing: The new industrial revolution. Bus. Horiz. 2012, 55, 155–162. [Google Scholar] [CrossRef]
- Li, J.; Chen, K.; Fan, L.; Peng, W.; Huang, L. Current status and developments in radar absorbing materials. J. Funct. Mater. 2005, 36, 1151–1154. [Google Scholar]
- Li, S.; Chan, C.; Tsang, L.; Li, Q.; Zhou, L. Parallel implementation of the sparse-matrix/canonical grid method for the analysis of two-dimensional random rough surfaces (three-dimensional scattering problem) on a Beowulf system. IEEE Trans. Geosci. Remote Sens. 2000, 38, 1600–1608. [Google Scholar]
- Li, L.; Huang, Y.; Zhou, L.; Wang, F. Triple-band antenna with shorted annular ring for high-precision GNSS applications. IEEE Antennas Wirel. Propagation Lett. 2016, 15, 942–945. [Google Scholar] [CrossRef]
- Williams, P.; Trivailo, P. Dynamics of circularly towed aerial cable systems, part i: Optimal configurations and their stability. J. Guid. Control. Dyn. 2012, 30, 766–779. [Google Scholar] [CrossRef]














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, C.; Ye, H.; Zhou, Y.; Xu, Y.; Wang, L. Scaled Sea Surface Design and RCS Measurement Based on Rough Film Medium. Sensors 2022, 22, 6290. https://doi.org/10.3390/s22166290
Guo C, Ye H, Zhou Y, Xu Y, Wang L. Scaled Sea Surface Design and RCS Measurement Based on Rough Film Medium. Sensors. 2022; 22(16):6290. https://doi.org/10.3390/s22166290
Chicago/Turabian StyleGuo, Chenyu, Hongxia Ye, Yi Zhou, Yonggang Xu, and Longxiang Wang. 2022. "Scaled Sea Surface Design and RCS Measurement Based on Rough Film Medium" Sensors 22, no. 16: 6290. https://doi.org/10.3390/s22166290