
A Multi-Tier Trust-Based Security Mechanism for Vehicular Ad-Hoc Network Communications

Abstract
:1. Introduction
1.1. Motivation and Contributions
- Proposed a multi-tier trust-based security mechanism based on vehicle behaviour.
- Proposed a security mechanism for protecting data integrity within the defined requirement of trust management in VANET communication.
- Proposed a security scheme to protect against malicious watchdogs in the VANET.
- Extended the proposed model to a multi-vehicle scenario providing a comprehensive review of the system with critical VANET factors, PDR and delay.
1.2. Paper Organization
2. VANET Overview
- Availability: In VANET communication, real-time data is used for many purposes, therefore the data must be available and accessible when needed [24]. Applications of VANET communication require a quick reaction to the data provided, therefore if there is any hold-up in the data, even for a few seconds, then the data could be rendered worthless.
- Authentication: This provides a guarantee that the data generated and forwarded by vehicles in the network are done by an authentic vehicle [25]. In VANET communication, it is especially important that the data are generated from an authentic vehicle because vehicles in the network react to the data they receive.
- Integrity: This ensures the data at the recipient and sender are the same and that data are only altered by authorized vehicles [13].
- Non-Repudiation (NR): The purpose of this is to avoid vehicles identified as malicious from refusing the offences [13,24]. Senders of messages cannot deny being the sender. Once a vehicle has been correctly identified as malicious it cannot masquerade as an innocent vehicle and transmit packets in the VANET.
- Confidentiality/Privacy: This gives a guarantee that the data will only be accessed by the authorised vehicles and that vehicle privacy will be maintained [6].
2.1. Attacks in VANETs
- Wormhole attack—This attack is similar to a black hole attack, but is performed by two cooperating malicious vehicles. The malicious vehicles will form a tunnel, transmitting messages to the other malicious vehicles at the end of the tunnel, thus never forwarding to the intended destination [12,27].
- Message suppression/Alteration attack—In this attack, the malicious vehicles will either suppress the message by dropping it or alter the message to fulfil their agenda [6].
- Timing attack—The malicious vehicle in this attack will add delays to the message without altering the content of the message [14].
- Eavesdropping attack—In this attack, the malicious vehicle will intercept and examine messages without altering the messages [18]. The main purpose of the attack is to gather information in preparation for a further devastating attack.
2.2. Related Work
3. Proposed Trust Management System
3.1. Components of the Trust Management System
- Vehicles—These are the vehicles that belong to the VANET. They are able to communicate with other vehicles in the VANET as well as the infrastructure.
- RSU—This provides a secure infrastructure component of the VANET. The RSU is assumed to be trusted, and highly resistant to attackers. For this reason, the security of the RSU is not considered in this work. The RSU is also responsible for the identification of malicious vehicles in the VANET, it will keep a record of malicious and non-malicious vehicles.
- Trust messages—Lightweight messages used to create data on vehicles in the VANET. They can only be created by vehicles with the watchdog agent activated.
- Watchdog agent—This agent can be applied to vehicles to enable monitoring mode. The watchdog agent is responsible for monitoring vehicle data and sending the data to the RSU. The watchdog collects data from readily available network information. In case a vehicle has recently joined the VANET and information is not available, the watchdog agent will forward trust messages in order to create data on the vehicle. Only verified trusted vehicles are selected as watchdogs in the VANET and only watchdogs are allowed to monitor data on vehicles. This significantly reduces the risk of a vehicle bad-mouthing another vehicle in the VANET.
- Threat agent—This agent can be applied to vehicles to enable malicious behaviour during VANET operations. The threat agent has access to vehicle communications and can control messages received by a vehicle. The threat agent can cause vehicles to drop messages received, delay messages received or both delay and drop messages received. This will simulate malicious behaviour in the VANET.
- Trusted vehicles—This is the set of vehicles that have not been taken over by the threat agent. They perform normal communication in the VANET.
- VANET—The VANET can exist in three states. In the first state, the VANET is run with no malicious vehicles present. This is used to create a baseline of the VANET when running in optimal conditions. In the second state, the VANET is populated with malicious vehicles, this indicates VANET behaviour in the presence of malicious vehicles. The third state involves applying the proposed system to a VANET with malicious vehicles present. The purpose of this is to evaluate the performance of the proposed system in a VANET made up of malicious vehicles.
3.2. Trust Management Functions
3.3. Trust Management Architecture
3.3.1. Packet Delivery Ratio
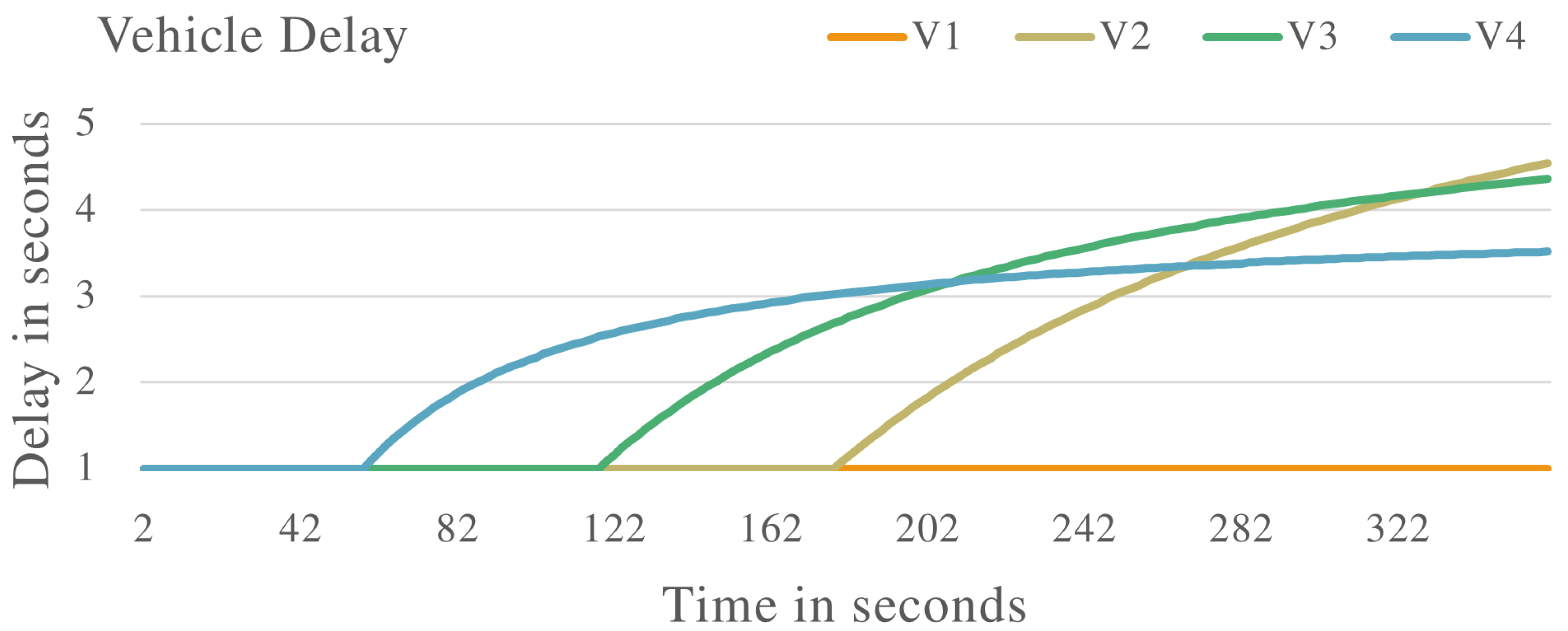
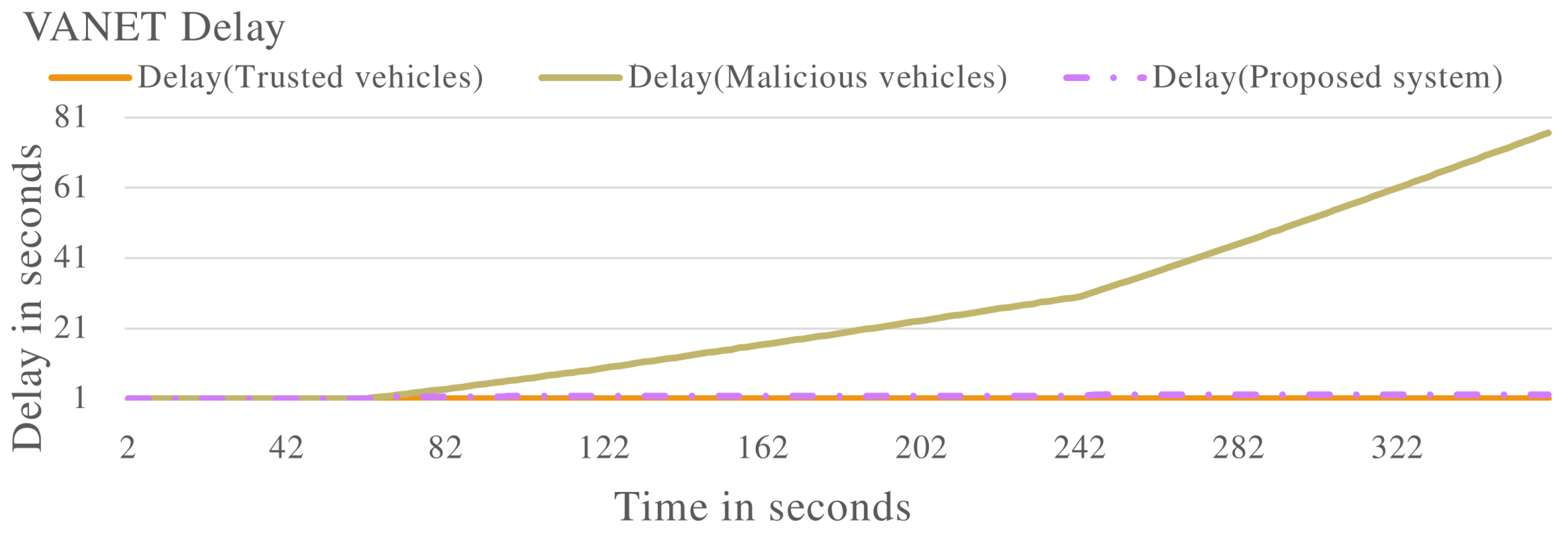
3.3.2. Processing Delay
3.3.3. Trust Value Calculation
3.3.4. Vehicle History
3.3.5. Trust Threshold
3.4. Data Integrity
| Algorithm 1: Calculating Trust value matrix |
| Algorithm 2: Calculating Trust Value () |
4. Results
- Malicious vehicles that drop messages—These malicious vehicles will receive messages from the source but will drop the messages instead of forwarding the messages to the destination vehicle. The vehicles will be simulated to drop messages at different rates within VANET operations. These will represent the following attacks that may cause messages to drop in a VANET: DOS attack, DDOS attack, blackhole attack, wormhole attack and replay attack.
- Malicious vehicles that delay messages—These malicious vehicles will receive messages from the source and instead of forwarding the messages directly to the destination vehicle, they will delay the message for a certain amount of time before forwarding the message. The vehicles will be simulated to delay messages at different rates in the VANET. These vehicles can be used to represent the following attacks that may cause delays in messages transmitted in a VANET: DOS attack, DDOS attack, message suppression/alteration attack, replay attack, timing attack, man-in-the-middle attack, and eavesdropping attack.
- Malicious vehicles that both delay and drop messages—These malicious vehicles will have the behaviour of vehicles that both delay packets and drop packets. They will both drop and delay messages at different times and at different rates during VANET operations. These vehicles simulate multiple attacks that may happen to a vehicle.
5. Discussion
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| VANET | Vehicle ad-hoc network |
| V2V | Vehicle-to-vehicle |
| V2I | Vehicle-to-Infrastructure |
| RSU | Road side unit |
| OBU | On-board unit |
| CCM | Central control module |
| TA | Trusted Authority |
| DSRC | Dedicated short-range communication |
| DOS | Denial-of-service |
| DDOS | Distributed denial-of-service |
| PDR | Packet delivery ratio |
| PD | Processing delay |
References
- Mahmood, A.; Butler, B.; Zhang, W.E.; Sheng, Q.Z.; Siddiqui, S.A. A Hybrid Trust Management Heuristic for VANETs. In Proceedings of the 2019 IEEE International Conference on Pervasive Computing and Communications Workshops, PerCom Workshops 2019, Kyoto, Japan, 11–15 March 2019; pp. 748–752. [Google Scholar] [CrossRef]
- Rathee, G.; Sharma, A.; Iqbal, R.; Aloqaily, M.; Jaglan, N.; Kumar, R. A blockchain framework for securing connected and autonomous vehicles. Sensors 2019, 19, 3165. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sommer, F.; Dürrwang, J.; Kriesten, R. Survey and classification of automotive security attacks. Information 2019, 10, 148. [Google Scholar] [CrossRef] [Green Version]
- Al-Shareeda, M.A.; Anbar, M.; Manickam, S.; Yassin, A.A. VPPCS: VANET-Based Privacy-Preserving Communication Scheme. IEEE Access 2020, 8, 150914–150928. [Google Scholar] [CrossRef]
- Zhang, D.; Zhang, T.; Liu, X. Novel self-adaptive routing service algorithm for application in VANET. Appl. Intell. 2019, 49, 1866–1879. [Google Scholar] [CrossRef]
- Hasrouny, H.; Samhat, A.E.; Bassil, C.; Laouiti, A. VANet security challenges and solutions: A survey. Veh. Commun. 2017, 7, 7–20. [Google Scholar] [CrossRef]
- Sheikh, M.S.; Liang, J. A comprehensive survey on VANET security services in traffic management system. Wirel. Commun. Mob. Comput. 2019, 2019, 2423915. [Google Scholar] [CrossRef] [Green Version]
- Sumithra, S.; Vadivel, R. An Overview of Various Trust Models for VANET Security Establishment. In Proceedings of the 2018 9th International Conference on Computing, Communication and Networking Technologies, ICCCNT 2018, Bengaluru, India, 10–12 July 2018. [Google Scholar] [CrossRef]
- Al-Heety, O.S.; Zakaria, Z.; Ismail, M.; Shakir, M.M.; Alani, S.; Alsariera, H. A Comprehensive Survey: Benefits, Services, Recent Works, Challenges, Security, and Use Cases for SDN-VANET. IEEE Access 2020, 8, 91028–91047. [Google Scholar] [CrossRef]
- Ahmad, F.; Hall, J.; Adnane, A.; Franqueira, V.N. Faith in Vehicles: A Set of Evaluation Criteria for Trust Management in Vehicular Ad-Hoc Network. In Proceedings of the 2017 IEEE International Conference on Internet of Things, IEEE Green Computing and Communications, IEEE Cyber, Physical and Social Computing, IEEE Smart Data, iThings-GreenCom-CPSCom-SmartData 2017, Exeter, UK, 21–23 June 2018; Volume 2018, pp. 44–52. [Google Scholar] [CrossRef]
- Feng, X.; Li, C.-y.; Chen, D.-x.; Tang, J. A method for defensing against multi-source Sybil attacks in VANET. Peer-to-Peer Netw. Appl. 2017, 10, 305–314. [Google Scholar] [CrossRef] [Green Version]
- Upadhyaya, A.N.; Shah, J. Attacks on VANET Security. Int. J. Comput. Eng. Technol. IJCET 2018, 9, 8–19. [Google Scholar]
- Deeksha; Kumar, A.; Bansal, M. A review on VANET security attacks and their countermeasure. In Proceedings of the 4th IEEE International Conference on Signal Processing, Computing and Control, ISPCC 2017, Solan, India, 21–23 September 2017; Volume 2017, pp. 580–585. [Google Scholar] [CrossRef]
- Hezam Al Junaid, M.A.; Syed, A.A.; Mohd Warip, M.N.; Fazira Ku Azir, K.N.; Romli, N.H. Classification of Security Attacks in VANET: A Review of Requirements and Perspectives. MATEC Web Conf. 2018, 150, 06038. [Google Scholar] [CrossRef]
- Balaram, A.; Pushpa, S. Sybil attack resistant location privacy in VANET. Int. J. Inf. Commun. Technol. 2018, 13, 389–406. [Google Scholar] [CrossRef]
- Shahid, M.A.; Jaekel, A.; Ezeife, C.; Al-Ajmi, Q.; Saini, I. Review of potential security attacks in VANET. In Proceedings of the Majan International Conference: Promoting Entrepreneurship and Technological Skills: National Needs, Global Trends, MIC 2018, Muscat, Oman, 19–20 March 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Zaidi, T.; Faisal, S. An overview: Various attacks in VANET. In Proceedings of the 2018 4th International Conference on Computing Communication and Automation, ICCCA 2018, Greater Noida, India, 14–15 December 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Sakiz, F.; Sen, S. A survey of attacks and detection mechanisms on intelligent transportation systems: VANETs and IoV. Ad Hoc Netw. 2017, 61, 33–50. [Google Scholar] [CrossRef]
- Arif, M.; Wang, G.; Zakirul Alam Bhuiyan, M.; Wang, T.; Chen, J. A survey on security attacks in VANETs: Communication, applications and challenges. Veh. Commun. 2019, 19, 100179. [Google Scholar] [CrossRef]
- Cheng, X.; Luo, Y.; Gui, Q. Research on Trust Management Model of Wireless Sensor Networks. In Proceedings of the 2018 IEEE 3rd Advanced Information Technology, Electronic and Automation Control Conference, IAEAC 2018, Chongqing, China, 12–14 October 2018; pp. 1397–1400. [Google Scholar] [CrossRef]
- Zhang, J. AATMS: An Anti-Attack Trust Management Scheme in VANET. IEEE Access 2020, 8, 21077–21090. [Google Scholar] [CrossRef]
- Koirala, B.; Tangade, S.S.; Manvi, S.S. Trust Management Based on Node Stay Time in VANET. In Proceedings of the 2018 International Conference on Advances in Computing, Communications and Informatics, ICACCI 2018, Bangalore, India, 19–22 September 2018; pp. 242–248. [Google Scholar] [CrossRef]
- Sharma, S.; Kaul, A. A survey on Intrusion Detection Systems and Honeypot based proactive security mechanisms in VANETs and VANET Cloud. Veh. Commun. 2018, 12, 138–164. [Google Scholar] [CrossRef]
- Kaur, R.; Scholar, M.; Pal, T.; Singh, M.; Khajuria, V.; Scholar, M. Security issues in vehicular ad-hoc network (VANET). In Proceedings of the IEEE 2018 2nd International Conference on Trends in Electronics and Informatics (ICOEI), Tirunelveli, India, 11–12 May 2018; pp. 884–889. [Google Scholar]
- Aarthy Devi, A.; Mohan, A.K.; Sethumadhavan, M. Wireless Security Auditing: Attack Vectors and Mitigation Strategies. Procedia Comput. Sci. 2017, 115, 674–682. [Google Scholar] [CrossRef]
- Tyagi, P.; Dembla, D. Performance analysis and implementation of proposed mechanism for detection and prevention of security attacks in routing protocols of vehicular ad-hoc network (VANET). Egypt. Inform. J. 2017, 18, 133–139. [Google Scholar] [CrossRef] [Green Version]
- Ali, S.; Nand, P.; Tiwari, S. Secure message broadcasting in VANET over Wormhole attack by using cryptographic technique. In Proceedings of the 2017 International Conference on Computing, Communication and Automation (ICCCA), Greater Noida, India, 5–6 May 2017; pp. 520–523. [Google Scholar]
- Quyoom, A.; Mir, A.A.; Sarwar, D.A. Security Attacks and Challenges of VANETs: A Literature Survey. J. Multimed. Inf. Syst. 2020, 7, 45–54. [Google Scholar] [CrossRef]
- Al-Mutiri, R.; Al-Rodhaan, M.; Tian, Y. Improving vehicular authentication in VANET using cryptography. Int. J. Commun. Netw. Inf. Secur. 2018, 10, 248–255. [Google Scholar]
- Kerrache, C.A.; Calafate, C.T.; Cano, J.C.; Lagraa, N.; Manzoni, P. Trust Management for Vehicular Networks: An Adversary-Oriented Overview. IEEE Access 2016, 4, 9293–9307. [Google Scholar] [CrossRef]
- Yan, X.; Gu, X.; Wang, J.; Wan, J.; Chen, L. A Kind of Event Trust Model for VANET Based on Statistical; Springer: New York, NY, USA, 2021; pp. 489–503. [Google Scholar]
- Shrestha, R.; Nam, S.Y. Trustworthy Event-Information Dissemination in Vehicular Ad Hoc Networks. Hidawi 2017, 2017, 9050787. [Google Scholar] [CrossRef] [Green Version]
- She, W.; Liu, Q.; Tian, Z.; Chen, J.S.; Wang, B.; Liu, W. Blockchain trust model for malicious node detection in wireless sensor networks. IEEE Access 2019, 7, 38947–38956. [Google Scholar] [CrossRef]
- Zheng, D.; Jing, C.; Guo, R.; Gao, S.; Wang, L. A Traceable Blockchain-Based Access Authentication System with Privacy Preservation in VANETs. IEEE Access 2019, 7, 117716–117726. [Google Scholar] [CrossRef]
- Lu, Z.; Wang, Q.; Qu, G.; Liu, Z. BARS: A Blockchain-Based Anonymous Reputation System for Trust Management in VANETs. In Proceedings of the 17th IEEE International Conference on Trust, Security and Privacy in Computing and Communications and 12th IEEE International Conference on Big Data Science and Engineering, Trustcom/BigDataSE 2018, New York, NY, USA, 1–3 August 2018; pp. 98–103. [Google Scholar] [CrossRef]
- Shrestha, R.; Bajracharya, R.; Shrestha, A.P.; Nam, S.Y. A new type of blockchain for secure message exchange in VANET. Digit. Commun. Netw. 2020, 6, 177–186. [Google Scholar] [CrossRef]
- Souissi, I.; Azzouna, N.B.; Berradia, T. Towards a self-adaptive trust management model for VANETs. In Proceedings of the ICETE 2017—14th International Joint Conference on e-Business and Telecommunications, Madrid, Spain, 24–26 July 2017; Volume 4, pp. 513–518. [Google Scholar] [CrossRef]
- Gao, H.; Liu, C.; Yin, Y.; Xu, Y.; Li, Y. A Hybrid Approach to Trust Node Assessment and Management for VANETs Cooperative Data Communication: Historical Interaction Perspective. IEEE Trans. Intell. Transp. Syst. 2021, 23, 16504–16513. [Google Scholar] [CrossRef]
- Tangade, S.; Manvi, S.S. Trust management scheme in VANET: Neighbour communication based approach. In Proceedings of the 2017 International Conference on Smart Technology for Smart Nation, SmartTechCon 2017, Bengaluru, India, 17–19 August 2018; pp. 741–744. [Google Scholar] [CrossRef]
- Gillani, M.; Ullah, A.; Niaz, H.A. Trust Management Schemes for Secure Routing in VANETs—A Survey. In Proceedings of the 12th International Conference on Mathematics, Actuarial Science, Computer Science and Statistics, MACS 2018—Proceedings, Karachi, Pakistan, 24–25 November 2019; pp. 7–12. [Google Scholar] [CrossRef]
- Pelletier, S.; Jabali, O.; Laporte, G.; Veneroni, M. Battery degradation and behaviour for electric vehicles: Review and numerical analyses of several models. Transp. Res. Part B Methodol. 2017, 103, 158–187. [Google Scholar] [CrossRef]
- Singh, K.V.; Bansal, H.O.; Singh, D. A comprehensive review on hybrid electric vehicles: Architectures and components. J. Mod. Transp. 2019, 27, 77–107. [Google Scholar] [CrossRef] [Green Version]
- Saleeb, H.; Sayed, K.; Kassem, A.; Mostafa, R. Power management strategy for battery electric vehicles. IET Electr. Syst. Transp. 2019, 9, 65–74. [Google Scholar] [CrossRef]
- Wang, Y.; Venugopal, K.; Molisch, A.F.; Heath, R.W. MmWave Vehicle-to-Infrastructure Communication: Analysis of Urban Microcellular Networks. IEEE Trans. Veh. Technol. 2018, 67, 7086–7100. [Google Scholar] [CrossRef] [Green Version]
- Steinstraeter, M.; Buberger, J.; Minnerup, K.; Trifonov, D.; Horner, P.; Weiss, B.; Lienkamp, M. Controlling cabin heating to improve range and battery lifetime of electric vehicles. eTransportation 2022, 13, 100181. [Google Scholar] [CrossRef]
- Awan, K.A.; Ud Din, I.; Almogren, A.; Guizani, M.; Khan, S. StabTrust-A Stable and Centralized Trust-Based Clustering Mechanism for IoT Enabled Vehicular Ad-Hoc Networks. IEEE Access 2020, 8, 21159–21177. [Google Scholar] [CrossRef]
- Alaya, B.; Sellami, L. Clustering method and symmetric/asymmetric cryptography scheme adapted to securing urban VANET networks. J. Inf. Secur. Appl. 2021, 58, 102779. [Google Scholar] [CrossRef]
- Soundararajan, R.; Palanisamy, N.; Patan, R.; Nagasubramanian, G.; Khan, M.S. Secure and concealed watchdog selection scheme using masked distributed selection approach in wireless sensor networks. IET Commun. 2020, 14, 948–955. [Google Scholar] [CrossRef]
- Govindasamy, J.; Punniakodi, S. Optimised watchdog system for detection of DDOS and wormhole attacks in IEEE802.15.4-based wireless sensor networks. Int. J. Mob. Netw. Des. Innov. 2018, 8, 36–44. [Google Scholar] [CrossRef]
- Nimje, C.; Junghare, P. A review on node activity detection, selfish & malicious behavioral patterns using watchdog algorithm. In Proceedings of the International Conference on Inventive Systems and Control, ICISC 2017, Coimbatore, India, 19–20 January 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Christopher Paul, A.; Bhanu, D.; Dhanapal, R.; Jebakumar Immanuel, D. An Efficient Authentication Using Monitoring Scheme for Node Misbehaviour Detection in MANET. In International Conference on Computing, Communication, Electrical and Biomedical Systems; EAI/Springer Innovations in Communication and Computing; Springer: Cham, Switzerland, 2022; pp. 627–633. [Google Scholar] [CrossRef]
- Houmer, M.; Hasnaoui, M.L. A Hybrid Intrusion Detection System Against Egoistic and Malicious Nodes in VANET; Springer International Publishing: Berlin/Heidelberg, Germany, 2020; pp. 961–973. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attack | Effect on Messages |
|---|---|
| Black Hole attack | Drop |
| Worm Hole attack | Drop |
| Message suppression/alteration | Delay |
| Replay attack | Both drop and delay |
| Timing attack | Delay |
| Man-in-the-middle attack | Delay |
| Eavesdropping attack | Delay |
| Parameters | Value |
|---|---|
| Area of network | 200 m2 |
| Number of vehicles | 8 |
| Transmission Range | 20 m |
| Number of watchdogs | 3 |
| Initial trust value | 1.0 |
| Simulation time | 360 s |
| Number of malicious vehicles | 3 |
| Vehicle speed | 0.5 m/s |
| MAC protocol | IEEE802.11p |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Akwirry, B.; Bessis, N.; Malik, H.; McHale, S. A Multi-Tier Trust-Based Security Mechanism for Vehicular Ad-Hoc Network Communications. Sensors 2022, 22, 8285. https://doi.org/10.3390/s22218285
Akwirry B, Bessis N, Malik H, McHale S. A Multi-Tier Trust-Based Security Mechanism for Vehicular Ad-Hoc Network Communications. Sensors. 2022; 22(21):8285. https://doi.org/10.3390/s22218285
Chicago/Turabian StyleAkwirry, Brian, Nik Bessis, Hassan Malik, and Sarah McHale. 2022. "A Multi-Tier Trust-Based Security Mechanism for Vehicular Ad-Hoc Network Communications" Sensors 22, no. 21: 8285. https://doi.org/10.3390/s22218285