
Trajectory Modeling by Distributed Gaussian Processes in Multiagent Systems



Abstract
:1. Introduction
1.1. Related Works
1.2. Contributions
1.3. Paper Structure
2. Preliminaries
2.1. Notation
2.2. Graph Theory
2.3. Gaussian Process
2.4. Kullback–Leibler Average Consensus Algorithm
2.5. Uniform Error Bounds
Asymptotic Analysis
3. Problem Formulation
4. Control Design and Analysis
4.1. Consensus
4.2. GP-Based Model Predictive Control for Discrete-Time System
| Algorithm 1 Gradient-based optimization method |
| Input: learning GP, , , , and |
| Output: Optimal control |
| 1: Initialization: Max iteration number , threshold , the initialized input and optimal control ; |
| 2: for to do |
| 3: if then |
| 4: ; |
| 5: end Loop; |
| 6: else |
| 7: Calculate the gradient by (32); |
| 8: Update search step size based on [69]; |
| 9: Update control ; |
| 10 Go next end end |
| 11: return Optimal control . |
5. Simulations
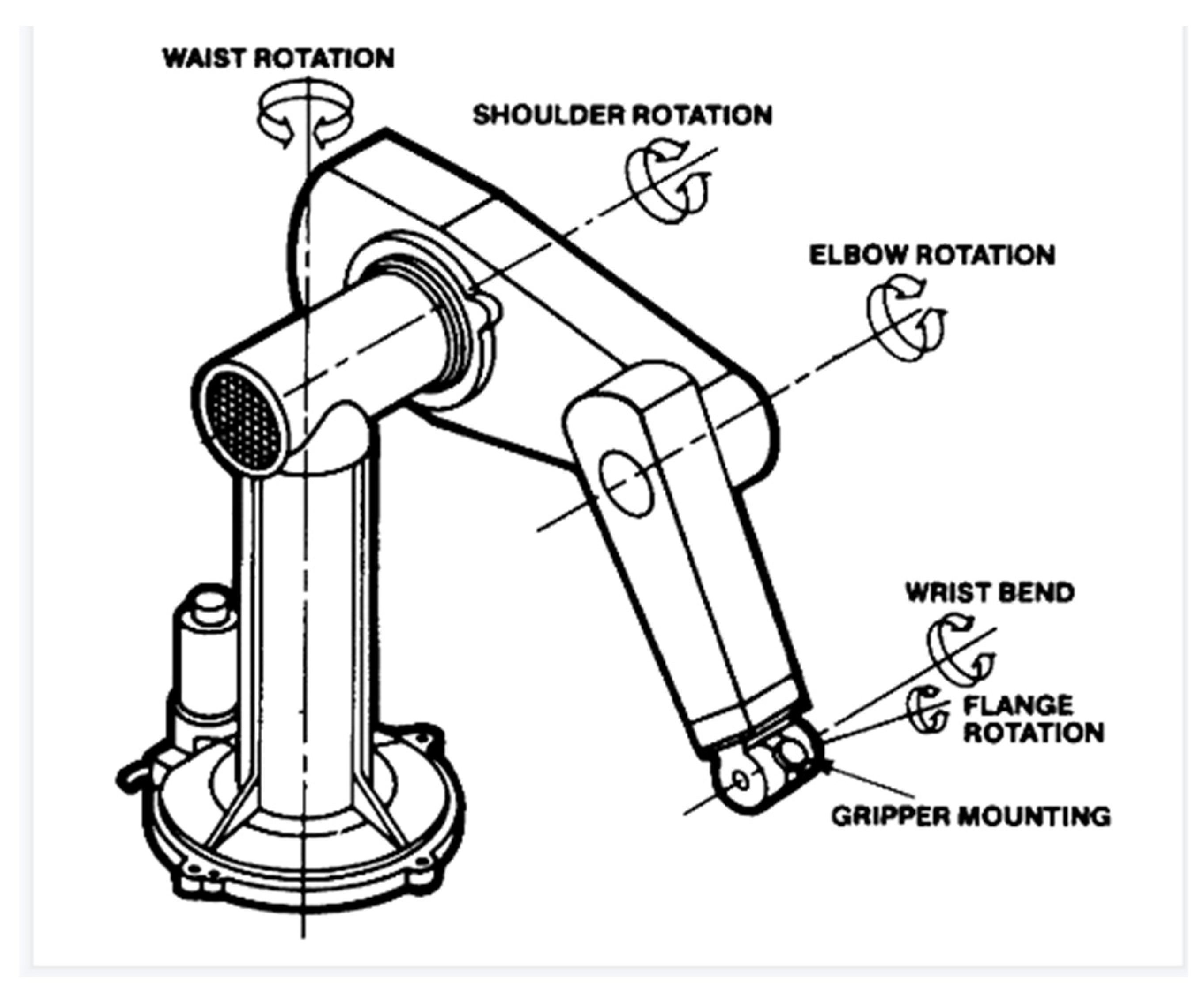
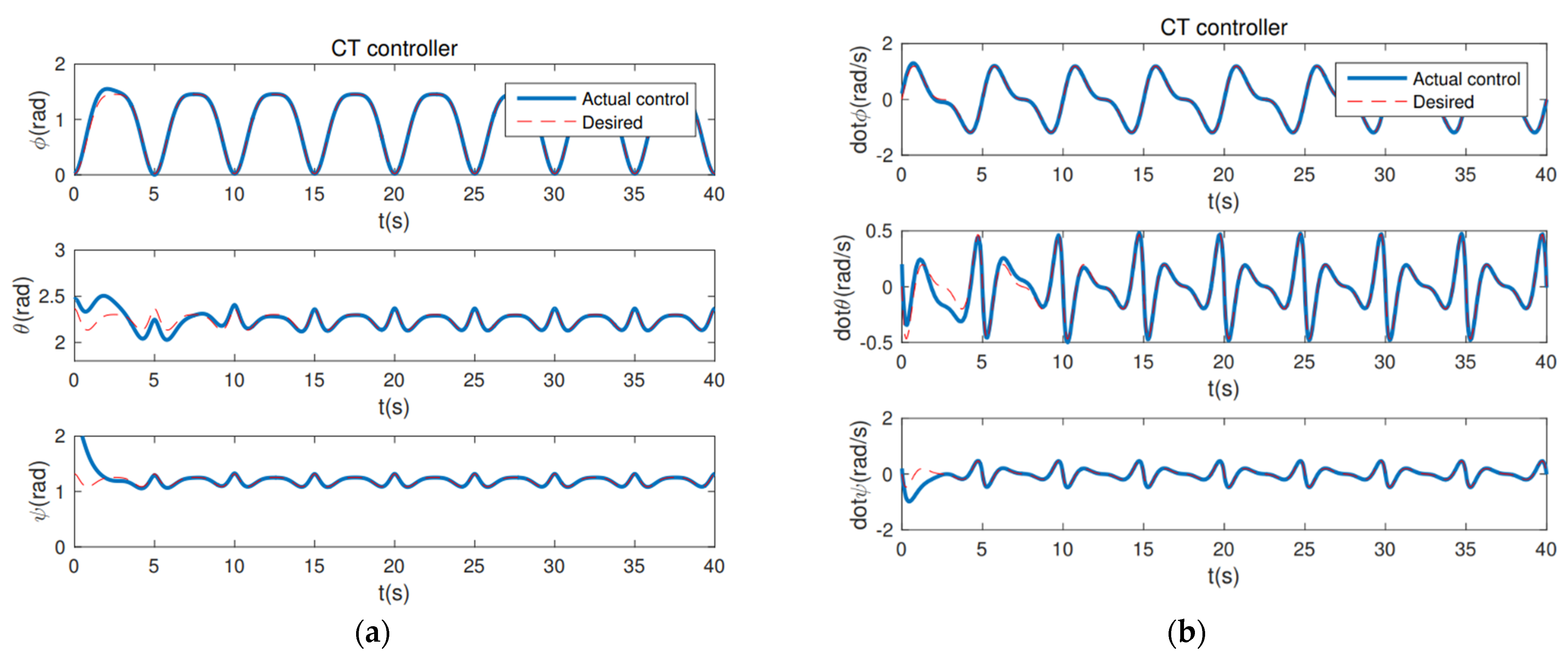
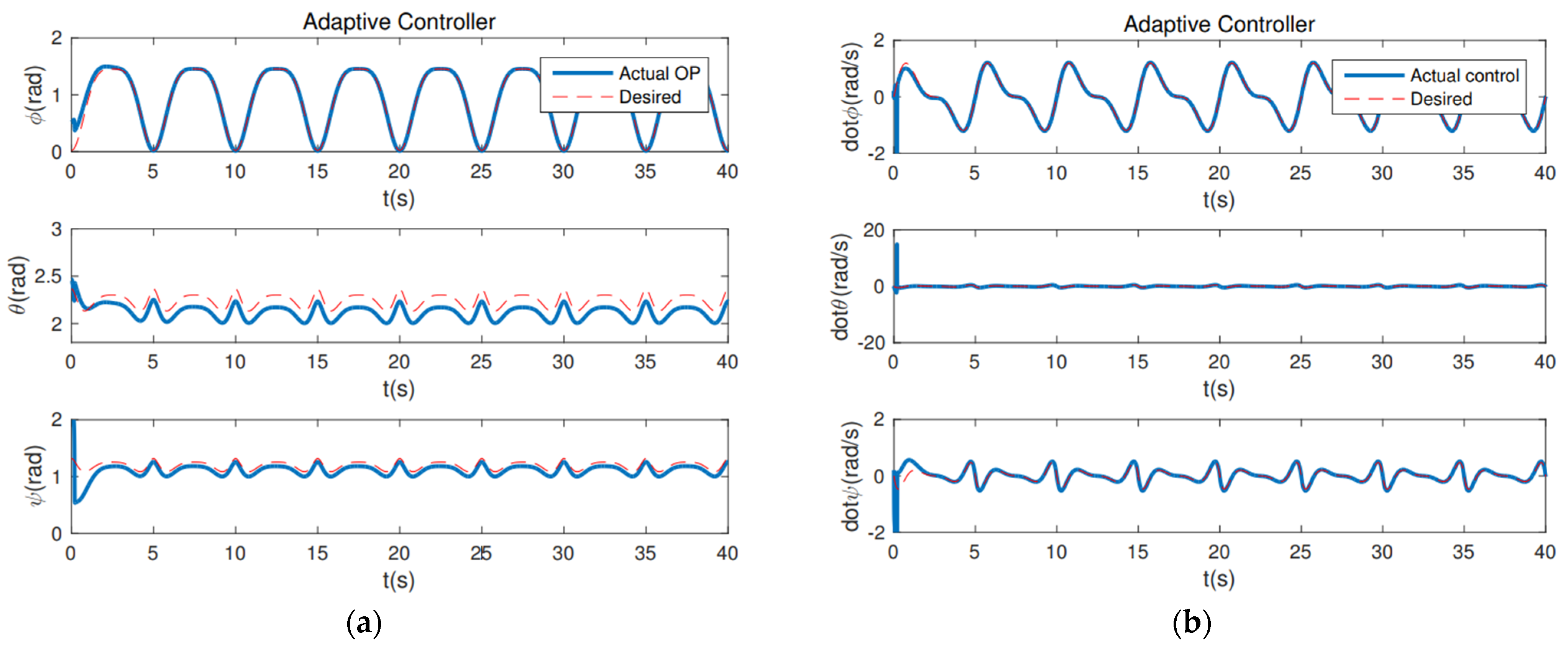
5.1. Trajectory Tracking of Robotic Manipulator
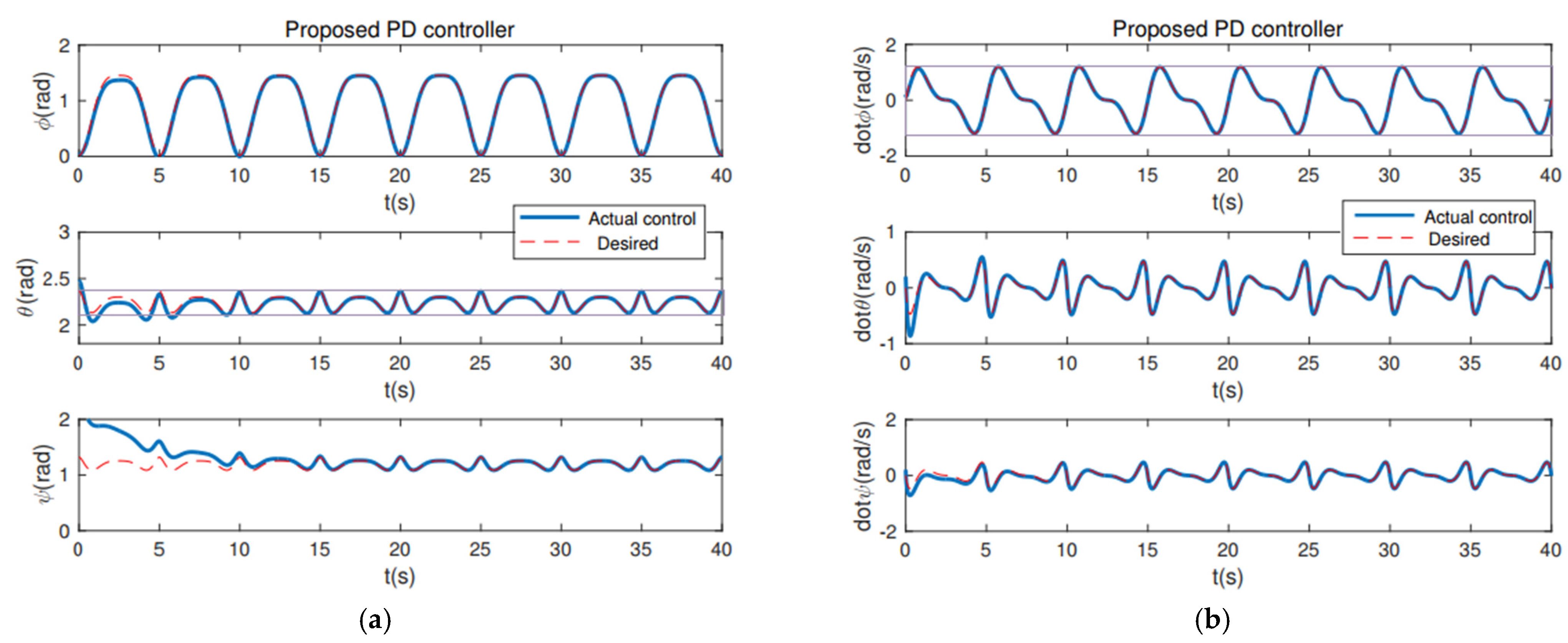
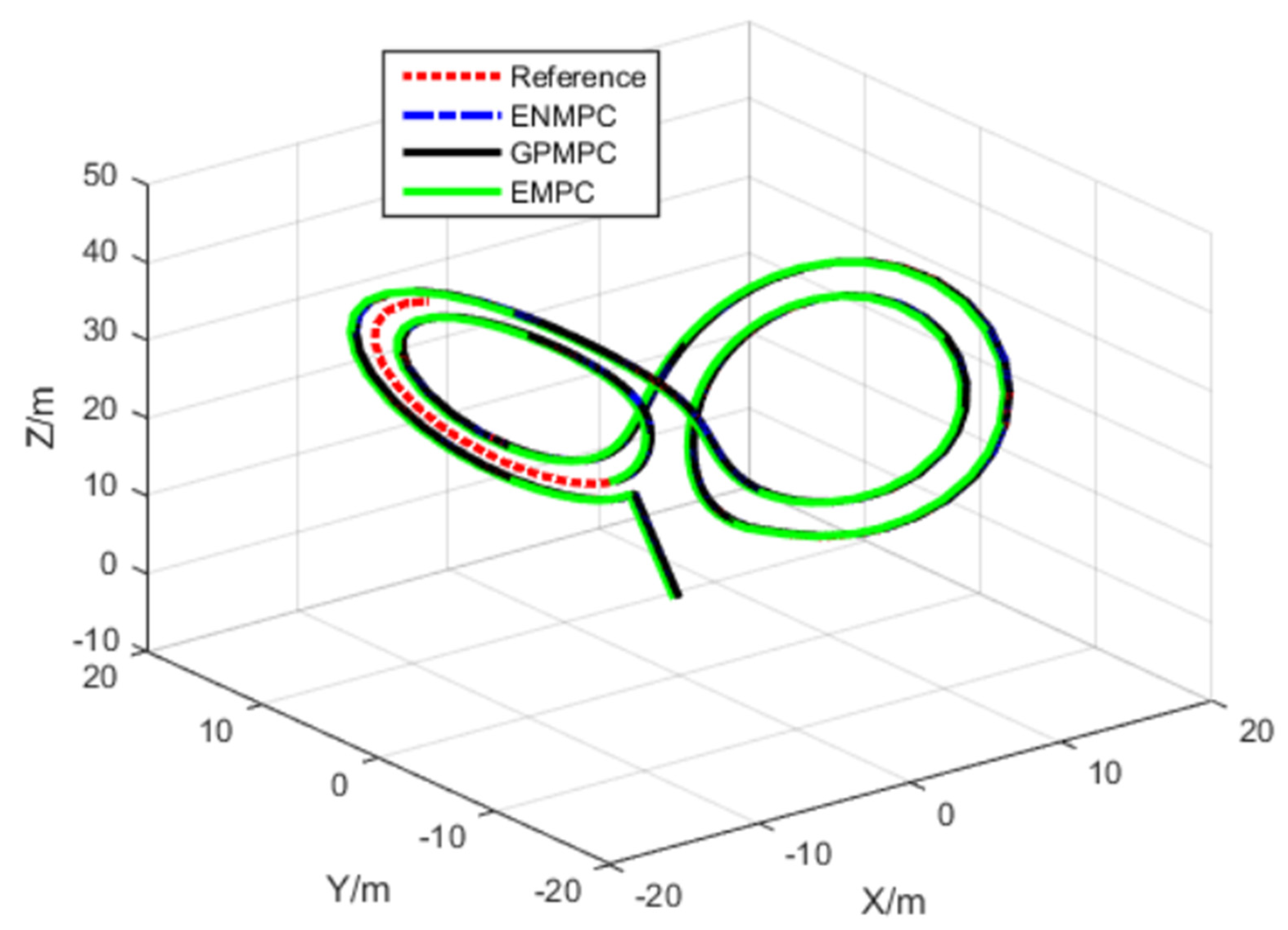
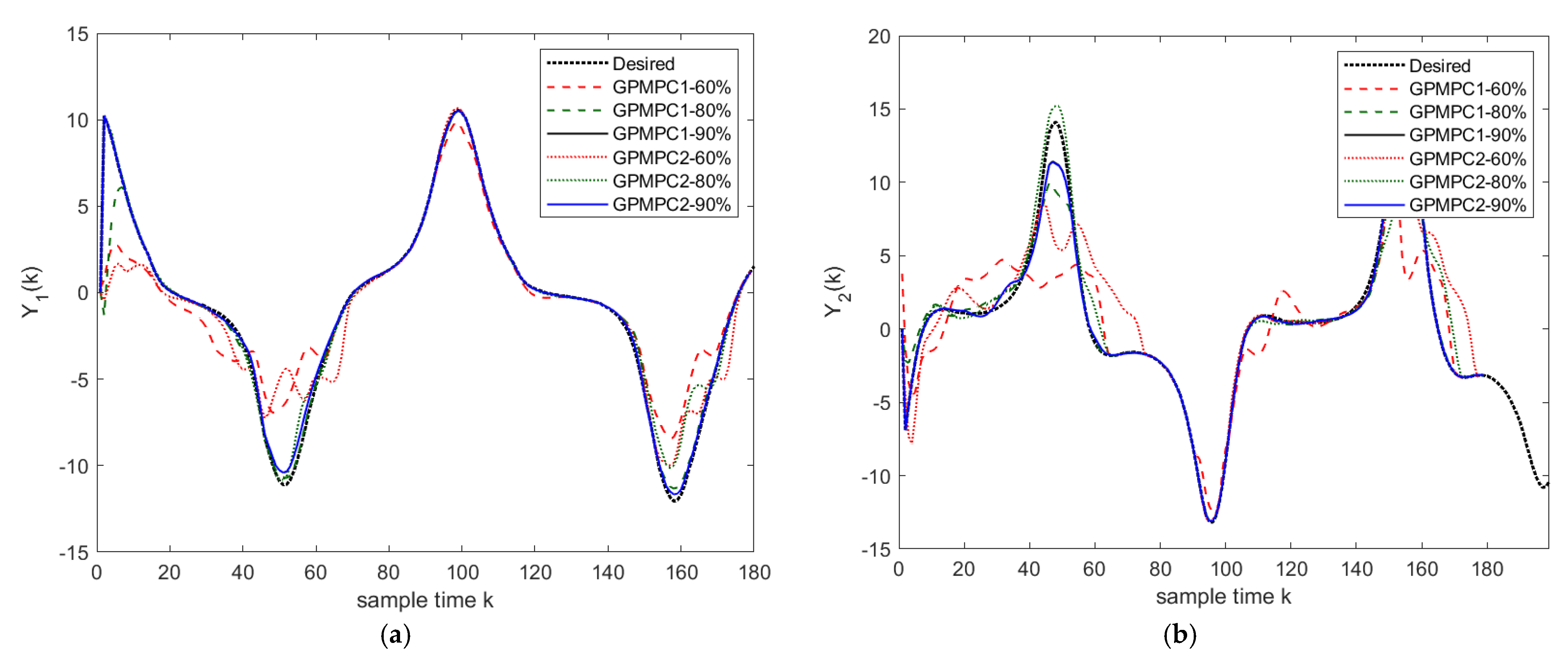
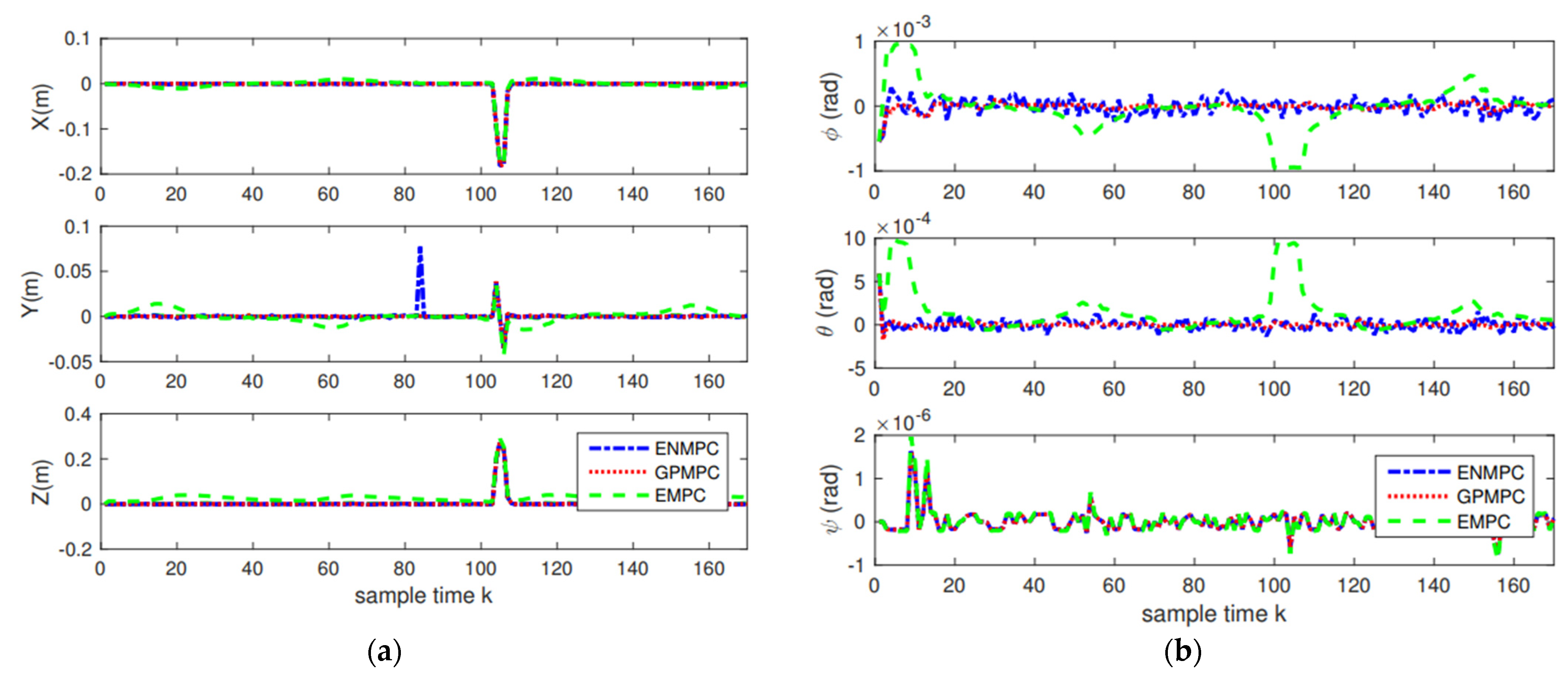
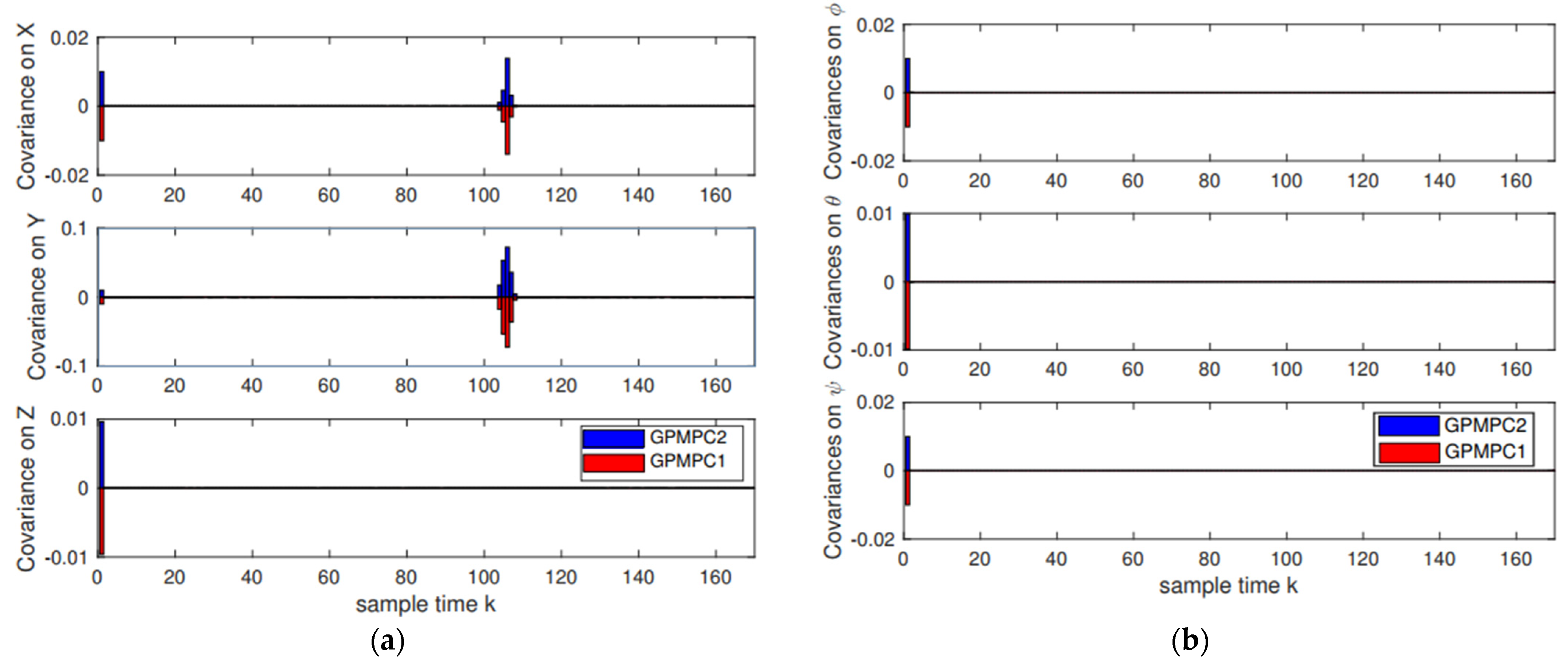
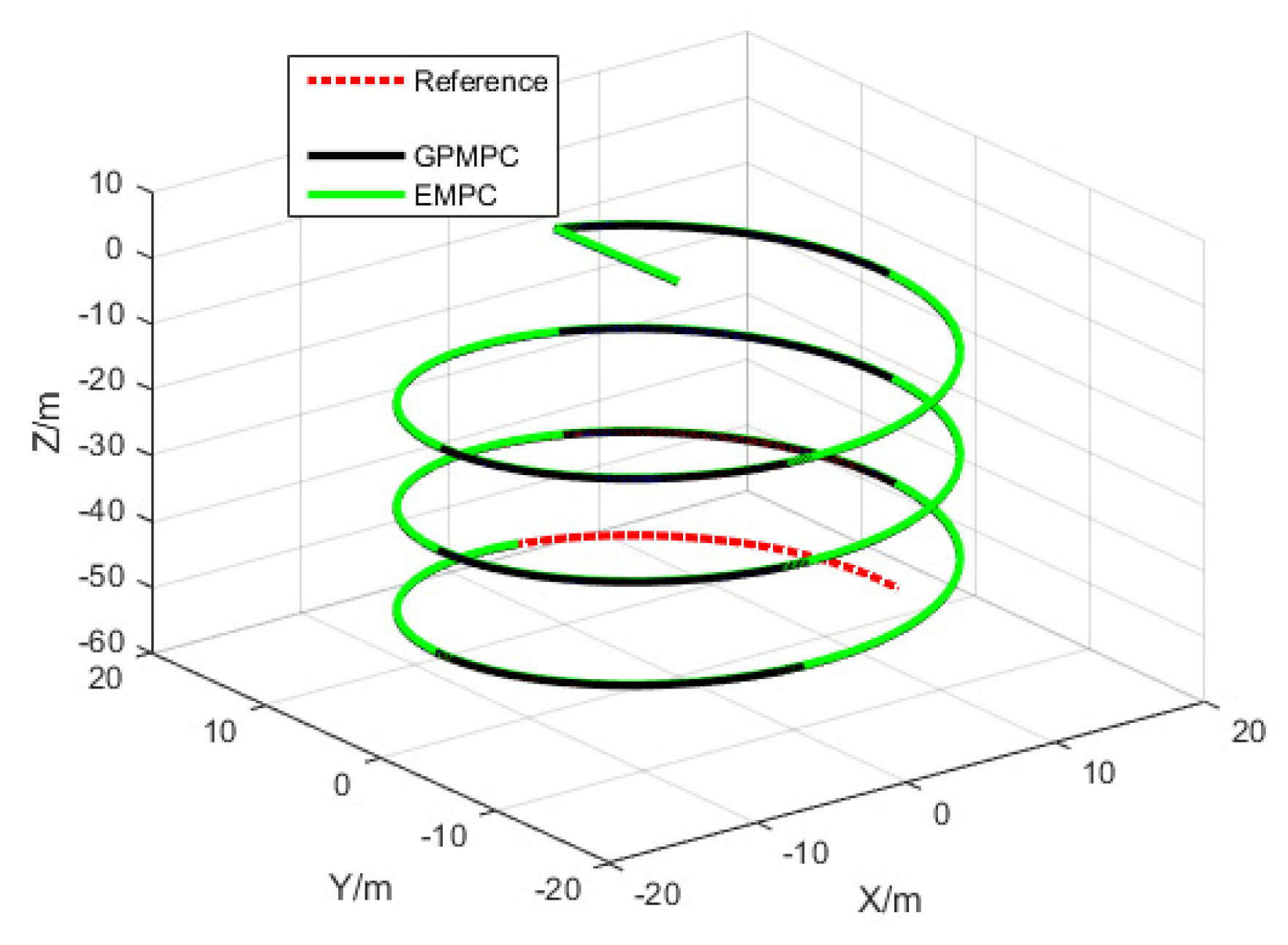
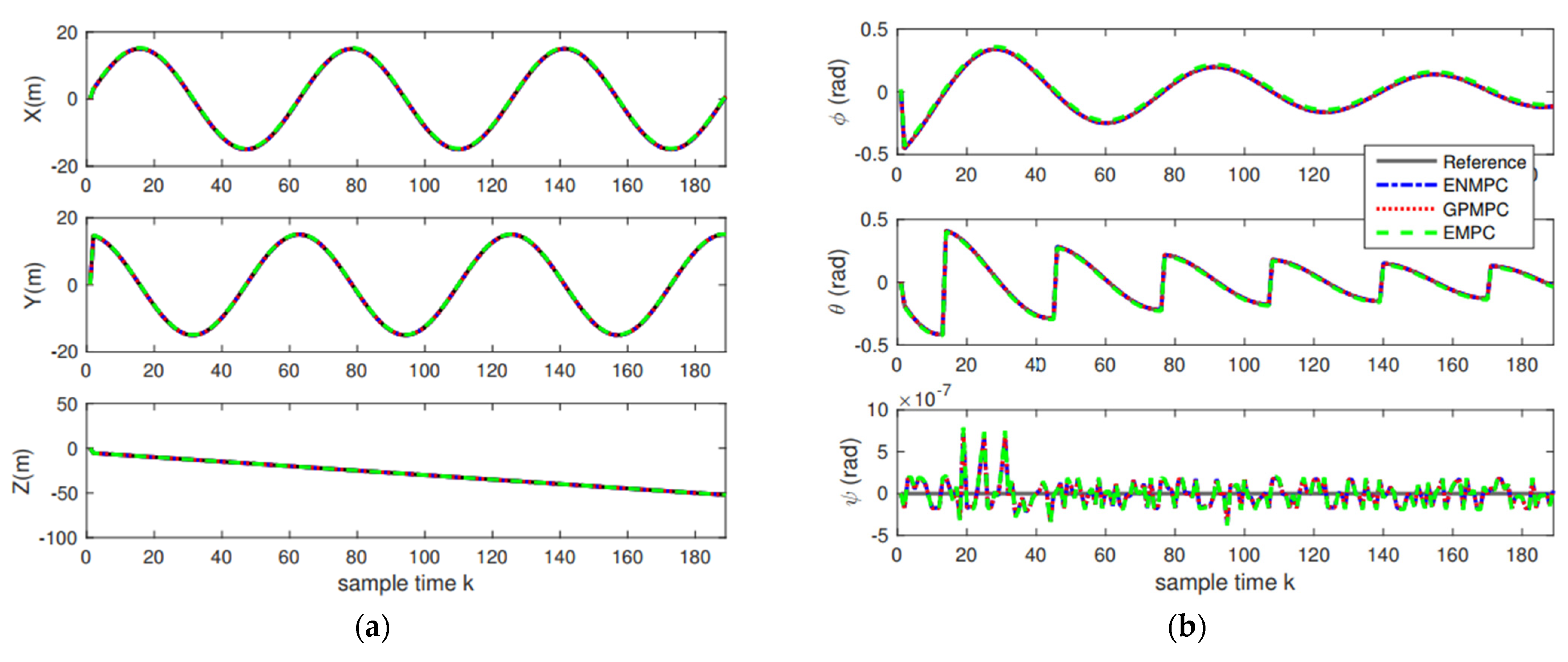
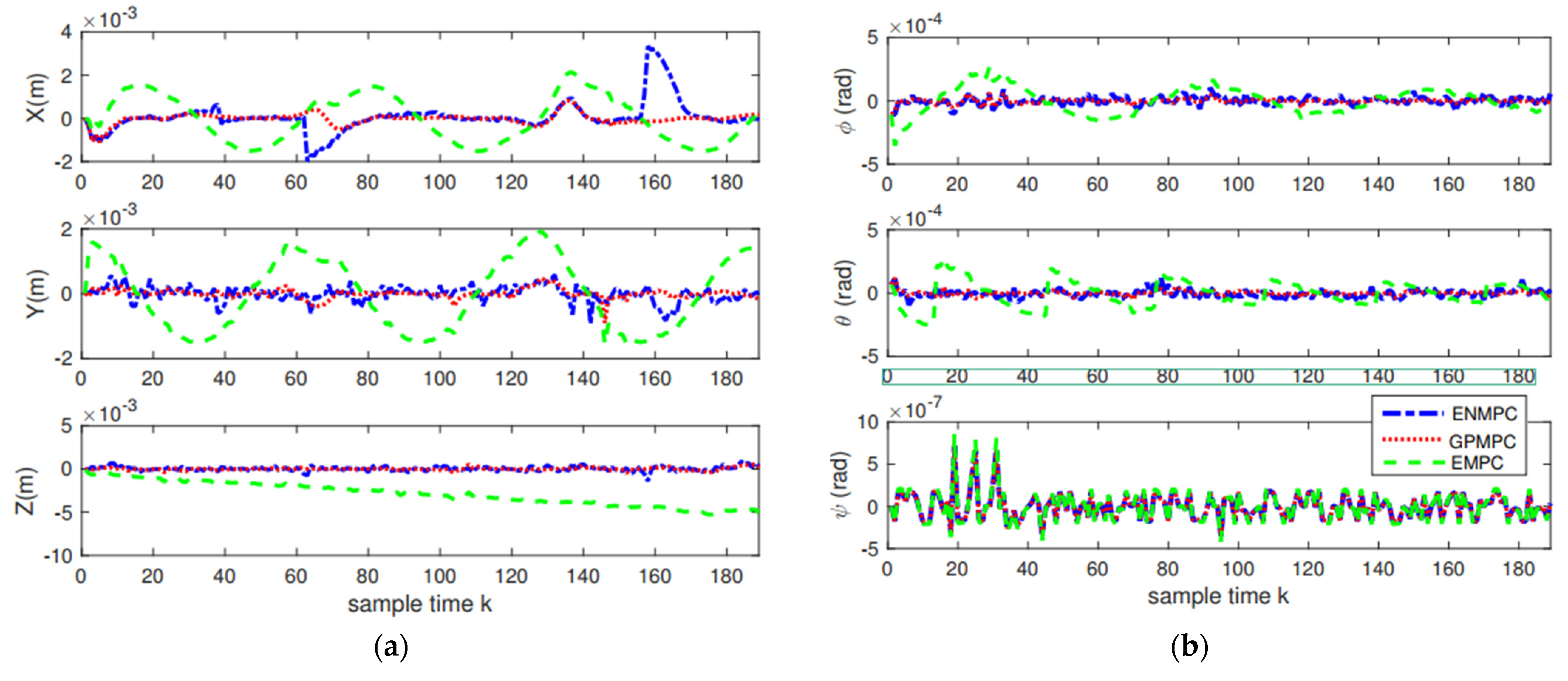
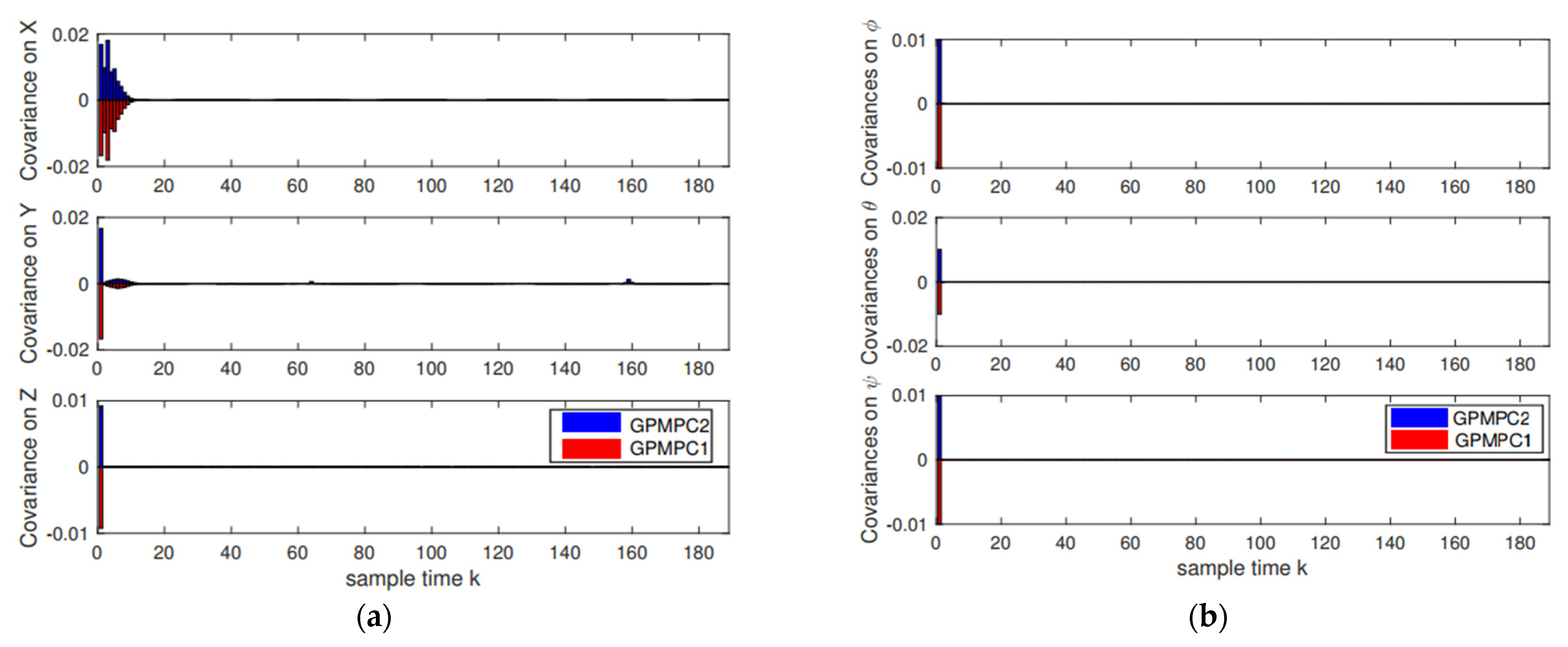
5.2. Trajectory Tracking of an Unmanned Quadrotor
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Proof of Theorem 1
Appendix B. Proof of Theorem 2
Appendix C. Proof of Theorem 3
References
- Beckers, T.; Umlauft, J.; Kulic, D.; Hirche, S. Stable Gaussian process based tracking control of Lagrangian systems. In Proceedings of the 2017 IEEE 56th Annual Conference on Decision and Control (CDC), Melbourne, Australia, 12–15 December 2017; pp. 5180–5185. [Google Scholar]
- Corke, P.I.; Khatib, O. Robotics, Vision and Control: Fundamental Algorithms in MATLAB; Springer: Berlin/Heidelberg, Germany, 2011; Volume 73. [Google Scholar]
- Wang, D.; Mu, C. Adaptive-critic-based robust trajectory tracking of uncertain dynamics and its application to a spring-mass-damper system. IEEE Trans. Ind. Electron. 2018, 65, 654–663. [Google Scholar] [CrossRef]
- Choi, J.; Jung, J.; Park, I. Area-efficient approach for generating quantized gaussian noise. IEEE Trans. Circuits Syst. I Regul. Pap. 2016, 63, 1005–1013. [Google Scholar] [CrossRef]
- Khansari-Zadeh, S.M.; Billard, A. Learning stable nonlinear dynamical systems with Gaussian mixture models. IEEE Trans. Robot. 2011, 27, 943–957. [Google Scholar] [CrossRef] [Green Version]
- Choi, J. Data-aided sensing for Gaussian process regression in iot systems. IEEE Internet Things 2021, 8, 7717–7726. [Google Scholar] [CrossRef]
- Diaz-Rozo, J.; Bielza, C.; Larranaga, P. Clustering of data streams with dynamic Gaussian Mixture Models: An IoT application in industrial processes. IEEE Internet Things J. 2018, 5, 3533–3547. [Google Scholar] [CrossRef] [Green Version]
- Sheng, H.; Xiao, J.; Cheng, Y.; Ni, Q.; Wang, S. Short-term solar power forecasting based on weighted Gaussian process regression. IEEE Trans. Ind. Electron. 2018, 65, 300–308. [Google Scholar] [CrossRef]
- Wen, Y.; Li, G.; Wang, Q.; Guo, X.; Cao, W. Modeling and analysis of permanent magnet spherical motors by a multi-task Gaussian process method and finite element method for output torque. IEEE Trans. Ind. Electron. 2021, 68, 8540–8549. [Google Scholar] [CrossRef]
- Jin, X. Fault tolerant nonrepetitive trajectory tracking for mimo output constrained nonlinear systems using iterative learning control. IEEE Trans. Cybern. 2019, 49, 3180–3190. [Google Scholar] [CrossRef] [PubMed]
- Fedele, G.; D’Alfonso, L. A kinematic model for swarm finite-time trajectory tracking. IEEE Trans. Cybern. 2019, 49, 3806–3815. [Google Scholar] [CrossRef]
- Wilson, A.G.; Knowles, D.A.; Ghahramani, Z. Gaussian process regression networks. In Proceedings of the 29th International Conference on Machine Learning, Edinburgh, UK, 26 June–1 July 2012. [Google Scholar]
- Pillonetto, G.; Schenato, L.; Varagnolo, D. Distributed multi-agent gaussian regression via finite-dimensional approximations. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 41, 2098–2111. [Google Scholar] [CrossRef]
- Varagnolo, D.; Pillonetto, G.; Schenato, L. Distributed parametric and nonparametric regression with on-line performance bounds computation. Automatica 2012, 48, 2468–2481. [Google Scholar] [CrossRef]
- Krivec, T.; Papa, G.; Kocijan, J. Simulation of variational Gaussian process NARX models with GPGPU. ISA Trans. 2021, 109, 141–151. [Google Scholar] [CrossRef]
- Aman, K.; Kocijan, J. Application of Gaussian processes for black-box modelling of biosystems. ISA Trans. 2007, 46, 443–457. [Google Scholar] [CrossRef] [PubMed]
- Hensman, J.; Durrande, N.; Solin, A. Variational fourier features for Gaussian processes. J. Mach. Learn. Res. 2017, 18, 5537–5588. [Google Scholar]
- Damianou, A.C.; Titsias, M.K.; Lawrence, N.D. Variational inference for latent variables and uncertain inputs in Gaussian processes. J. Mach. Learn. Res. 2016, 17, 1425–1486. [Google Scholar]
- Meng, Z.; Lin, Z.; Ren, W. Robust cooperative tracking for multiple non-identical second-order nonlinear systems. Automatica 2013, 49, 2363–2372. [Google Scholar] [CrossRef]
- Pu, S.; Yu, X.; Li, J. Distributed Kalman filter for linear system with complex multichannel stochastic uncertain parameter and decoupled local filters. Int. J. Adapt. Control. Signal Process. 2021, 35, 1498–1512. [Google Scholar] [CrossRef]
- Yu, X.; Li, J. Adaptive Kalman filtering for recursive both additive noise and multiplicative noise. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 1634–1649. [Google Scholar] [CrossRef]
- Huang, Y.; Meng, Z. Bearing-based distributed formation control of multiple vertical take-off and landing UAVs. IEEE Trans. Control. Netw. Syst. 2021, 8, 1281–1292. [Google Scholar] [CrossRef]
- Yang, T.; Yi, X.; Wu, J.; Yuan, Y.; Wu, D.; Meng, Z.; Hong, Y.; Wang, H.; Lin, Z.; Johansson, K.H. A survey of distributed optimization. Annu. Rev. Control. 2019, 47, 278–305. [Google Scholar] [CrossRef]
- Li, X.; Caimou, H.; Haoji, H. Distributed filter with consensus strategies for sensor networks. J. Appl. Math. 2013, 2013, 683249. [Google Scholar] [CrossRef] [Green Version]
- Zhou, T. Coordinated one-step optimal distributed state prediction for a networked dynamical system. IEEE Trans. Autom. Control. 2013, 58, 2756–2771. [Google Scholar] [CrossRef]
- Battistelli, G.; Chisci, L. Kullback-Leibler average, consensus on probability densities, and distributed state estimation with guaranteed stability. Automatica 2014, 50, 707–718. [Google Scholar] [CrossRef]
- Umlauft, J.; Lederer, A.; Hirche, S. Learning stable Gaussian process state space models. In Proceedings of the 2017 American Control Conference (ACC), Seattle, DC, USA, 24–26 May 2017; pp. 1499–1504. [Google Scholar]
- Jagtap, P.; Pappas, G.J.; Zamani, M. Control barrier functions for unknown nonlinear systems using Gaussian processes. In Proceedings of the 2020 59th IEEE Conference on Decision and Control (CDC), Jeju Island, Korea, 14–18 December 2020; pp. 3699–3704. [Google Scholar]
- Pöhler, L.D.; Umlauft, J.; Hirche, S. Uncertainty-based Human Motion Tracking with Stable Gaussian Process State Space Models. IFAC-Pap. 2019, 51, 8–14. [Google Scholar] [CrossRef]
- Umlauft, J.; Pöhler, L.D.; Hirche, S. An uncertainty-based control Lyapunov approach for control-affine systems modeled by Gaussian process. IEEE Control. Syst. Lett. 2018, 2, 483–488. [Google Scholar] [CrossRef] [Green Version]
- Lederer, A.; Umlauft, J.; Hirche, S. Uniform error bounds for Gaussian process regression with application to safe control. Adv. Neural Inf. Process. Syst. 2019, 32, 659–669. [Google Scholar]
- Deisenroth, M.; Ng, J.W. Distributed Gaussian processes. In Proceedings of the 32nd International Conference on Machine Learning, Lille, France, 7–9 July 2015; pp. 1481–1490. [Google Scholar]
- Xie, A.; Yin, F.; Xu, Y.; Ai, B.; Chen, T.; Cui, S. Distributed Gaussian processes hyperparameter optimization for big data using proximal ADMM. IEEE Signal Processing Lett. 2019, 26, 1197–1201. [Google Scholar] [CrossRef]
- Bonilla, E.V.; Chai, K.M.; Williams, C. Multi-task Gaussian process prediction. In Proceedings of the Advances in Neural Information Processing Systems 20 (NIPS 2007), Vancouver, BC, Canada, 3–5 December 2008; pp. 153–160. [Google Scholar]
- Alvarez, M.; Lawrence, N.D. Sparse convolved Gaussian processes for multi-output regression. In Proceedings of the Advances in Neural Information Processing Systems 21 (NIPS 2008), Vancouver, BC, Canada, 8 December 2009. [Google Scholar]
- Gal, Y.; van der Wilk, M.; Rasmussen, C.E. Distributed variational inference in sparse Gaussian process regression and latent variable models. In Proceedings of the Advances in Neural Information Processing Systems 27 (NIPS 2014), Montreal, Canada, 8–13 December 2014; pp. 3257–3265. [Google Scholar]
- Nerurkar, E.D.; Roumeliotis, S.I.; Martinelli, A. Distributed maximum a posteriori estimation for multi-robot cooperative localization. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 6 July 2009; pp. 1402–1409. [Google Scholar]
- Franceschelli, M.; Gasparri, A. On agreement problems with gossip algorithms in absence of common reference frames. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 15 July 2010; pp. 4481–4486. [Google Scholar]
- Cunningham, A.; Indelman, V.; Dellaert, F. DDF-SAM 2.0: Consistent distributed smoothing and mapping. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 5220–5227. [Google Scholar]
- Anderson, B.D.; Shames, I.; Mao, G.; Fidan, B. Formal theory of noisy sensor network localization. SIAM J. Discret. Math. 2010, 24, 684–698. [Google Scholar] [CrossRef]
- Carron, A.; Todescato, M.; Carli, R.; Schenato, L. An asynchronous consensus-based algorithm for estimation from noisy relative measurements. IEEE Trans. Control. Netw. Syst. 2014, 1, 283–295. [Google Scholar] [CrossRef]
- Thunberg, J.; Montijano, E.; Hu, X. Distributed attitude synchronization control. In Proceedings of the 2011 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011; pp. 1962–1967. [Google Scholar]
- Piovan, G.; Shames, I.; Fidan, B.; Bullo, F.; Anderson, B.D. On frame and orientation localization for relative sensing networks. Automatica 2013, 49, 206–213. [Google Scholar] [CrossRef] [Green Version]
- Sarlette, A.; Sepulchre, R. Consensus optimization on manifolds. SIAM J. Control. Optim. 2009, 48, 56–76. [Google Scholar] [CrossRef] [Green Version]
- Choudhary, S.; Carlone, L.; Nieto, C.; Rogers, J.; Christensen, H.I.; Dellaert, F. Distributed trajectory estimation with privacy and communication constraints: A two-stage distributed Gauss-seidel approach. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 5261–5268. [Google Scholar]
- Deisenroth, M.P.; Fox, D.; Rasmussen, C.E. Gaussian processes for data-efficient learning in robotics and control. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 408–423. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Robinson, D.R.; Mar, R.T.; Estabridis, K.; Hewer, G. An efficient algorithm for optimal trajectory generation for heterogeneous multi-agent systems in non-convex environments. IEEE Robot. Autom. Lett. 2018, 3, 1215–1222. [Google Scholar] [CrossRef]
- Wang, J.M.; Fleet, D.J.; Hertzmann, A. Gaussian process dynamical models for human motion. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 30, 283–298. [Google Scholar] [CrossRef] [Green Version]
- Negenborn, R.R.; Maestre, J.M. Distributed model predictive control: An overview and roadmap of future research opportunities. IEEE Control. Syst. Mag. 2014, 34, 87–97. [Google Scholar]
- Stewart, B.T.; Wright, S.J.; Rawlings, J.B. Cooperative distributed model predictive control for nonlinear systems. J. Process Control. 2011, 21, 698–704. [Google Scholar] [CrossRef]
- Ferramosca, A.; Limón, D.; Alvarado, I.; Camacho, E.F. Cooperative distributed MPC for tracking. Automatica 2013, 49, 906–914. [Google Scholar] [CrossRef]
- Conte, C.; Jones, C.N.; Morari, M.; Zeilinger, M.N. Distributed synthesis and stability of cooperative distributed model predictive control for linear systems. Automatica 2016, 69, 117–125. [Google Scholar] [CrossRef] [Green Version]
- Groß, D.; Stursberg, O. A cooperative distributed MPC algorithm with event-based communication and parallel optimization. IEEE Trans. Control. Netw. Syst. 2015, 3, 275–285. [Google Scholar] [CrossRef]
- Alrifaee, B.; Heßeler, F.J.; Abel, D. Coordinated non-cooperative distributed model predictive control for decoupled systems using graphs. IFAC-Pap. 2016, 49, 216–221. [Google Scholar]
- Alonso, C.A.; Matni, N. Distributed and localized closed loop model predictive control via system level synthesis. In Proceedings of the 2020 59th IEEE Conference on Decision and Control (CDC), Jeju, Korea, 14–18 December 2020; pp. 5598–5605. [Google Scholar]
- Alonso, C.A.; Matni, N.; Anderson, J. Explicit distributed and localized model predictive control via system level synthesis. In Proceedings of the 2020 59th IEEE Conference on Decision and Control (CDC), Jeju, Korea, 14–18 December 2020; pp. 5606–5613. [Google Scholar]
- Luis, C.E.; Schoellig, A.P. Trajectory generation for multiagent point-to-point transitions via distributed model predictive control. IEEE Robot. Autom. Lett. 2019, 4, 375–382. [Google Scholar] [CrossRef] [Green Version]
- Torrente, G.; Kaufmann, E.; Föhn, P.; Scaramuzza, D. Data-driven MPC for quadrotors. IEEE Robot. Autom. Lett. 2021, 6, 3769–3776. [Google Scholar] [CrossRef]
- Liu, D.; Tang, M.; Fu, J. Robust adaptive trajectory tracking for wheeled mobile robots based on Gaussian process regression. Syst. Control. Lett. 2022, 163, 105210. [Google Scholar] [CrossRef]
- Akbari, B.; Zhu, H. Tracking Dependent Extended Targets Using Multi-Output Spatiotemporal Gaussian Processes. IEEE Trans. Intell. Transp. Syst. 2022, 23, 18301–18314. [Google Scholar] [CrossRef]
- Hidalgo-Carrió, J.; Hennes, D.; Schwendner, J.; Kirchner, F. Gaussian process estimation of odometry errors for localization and mapping. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 5696–5701. [Google Scholar]
- Brossard, M.; Bonnabel, S. Learning wheel odometry and IMU errors for localization. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 291–297. [Google Scholar]
- Nguyen, T.V.; Bonilla, E.V. Collaborative multi-output Gaussian processes. In Proceedings of the UAI’14: Thirtieth Conference on Uncertainty in Artificial Intelligence, Citeseer, Quebec City, QC, Canada, 23–27 July 2014; pp. 643–652. [Google Scholar]
- Carron, A.; Todescato, M.; Carli, R.; Schenato, L.; Pillonetto, G. Multi-agents adaptive estimation and coverage control using Gaussian regression. In Proceedings of the 2015 European Control Conference (ECC), Linz, Austria, 15–17 July 2015; pp. 2490–2495. [Google Scholar]
- Mallasto, A.; Feragen, A. Learning from uncertain curves: The 2-wasserstein metric for gaussian processes. In Proceedings of the 31st Conference on Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017. [Google Scholar]
- Rasmussen, C.E.; Williams, C.K. Gaussian Processes for Machine Learning. In Adaptive Computation and Machine Learning; MIT Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Khalil, H.K. Nonlinear Systems: International Edition. Bull. Am. Acad. Arts Sci. 2002, 53, 20–24. [Google Scholar]
- Umlauft, J.; Hirche, S. Feedback linearization based on Gaussian processes with event triggered online learning. IEEE Trans. Autom. Control. 2020, 65, 4154–4169. [Google Scholar] [CrossRef]
- Zhou, B.; Gao, L.; Dai, Y.H. Gradient methods with adaptive step-sizes. Comput. Optim. Appl. 2006, 35, 69–86. [Google Scholar] [CrossRef]
- Ivanov, S.E.; Zudilova, T.; Voitiuk, T.; Ivanova, L.N. Mathematical modeling of the dynamics of 3-DOF robot-manipulator with software control. Procedia Comput. Sci. 2020, 178, 311–319. [Google Scholar] [CrossRef]
- Abdolhosseini, M. Model Predictive Control of an Unmanned Quadrotor Helicopter: Theory and Flight Tests. Ph.D. Thesis, Concordia University, Montreal, QC, Canada, 2012. [Google Scholar]
- Cannon, M. Efficient nonlinear model predictive control algorithms. Annu. Rev. Control. 2004, 28, 229–237. [Google Scholar] [CrossRef]
- Beckers, T.; Kulic, D.; Hirche, S. Stable Gaussian process based tracking control of Euler-Lagrange systems. Automatica 2019, 103, 390–397. [Google Scholar] [CrossRef] [Green Version]
- Srinivas, N.; Krause, A.; Kakade, S.M.; Seeger, M.W. Information-theoretic regret bounds for Gaussian process optimization in the bandit setting. IEEE Trans. Inf. Theory 2012, 58, 3250–3265. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller | ||||||
|---|---|---|---|---|---|---|
| CT | 0.0077 | 0.0284 | 0.0488 | 0.0135 | 0.0239 | 0.0289 |
| Adaptive | 0.0216 | 0.1226 | 0.1009 | 0.0378 | 0.0451 | 0.1969 |
| The Proposed PD | 0.0209 | 0.0205 | 0.1392 | 0.0072 | 0.0137 | 0.0349 |
| Training Methods\Training Errors | Positions | Attitudes |
| GPMPC1 | 4.3496 × 10−4 | 4.3030 × 10−9 |
| GPMPC2 | 4.3618 × 10−4 | 1.5746 × 10−8 |
| Controllers\Mean Absolute Errors | Positions | Attitudes |
| EMPC | 0.0287 | 9.6239 × 10−11 |
| ENMPC | 0.0050 | 7.6412 × 10−11 |
| GPMPC | 0.0049 | 2.2407 × 10−11 |
| Training Methods\Training Errors | Positions | Attitudes |
| GPMPC1 | 6.1494 × 10−8 | 3.8282 × 10−10 |
| GPMPC2 | 5.1161 × 10−7 | 1.1889 × 10−9 |
| Controllers\Mean Absolute Errors | Positions | Attitudes |
| EMPC | 0.0287 | 0.0263 |
| ENMPC | 0.0050 | 1.8769 × 10−4 |
| GPMPC | 0.0049 | 8.4033 × 10−5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xin, D.; Shi, L. Trajectory Modeling by Distributed Gaussian Processes in Multiagent Systems. Sensors 2022, 22, 7887. https://doi.org/10.3390/s22207887
Xin D, Shi L. Trajectory Modeling by Distributed Gaussian Processes in Multiagent Systems. Sensors. 2022; 22(20):7887. https://doi.org/10.3390/s22207887
Chicago/Turabian StyleXin, Dongjin, and Lingfeng Shi. 2022. "Trajectory Modeling by Distributed Gaussian Processes in Multiagent Systems" Sensors 22, no. 20: 7887. https://doi.org/10.3390/s22207887