
An Assessment of Waveform Processing for a Single-Beam Bathymetric LiDAR System (SBLS-1)
Abstract
:1. Introduction
2. Methods
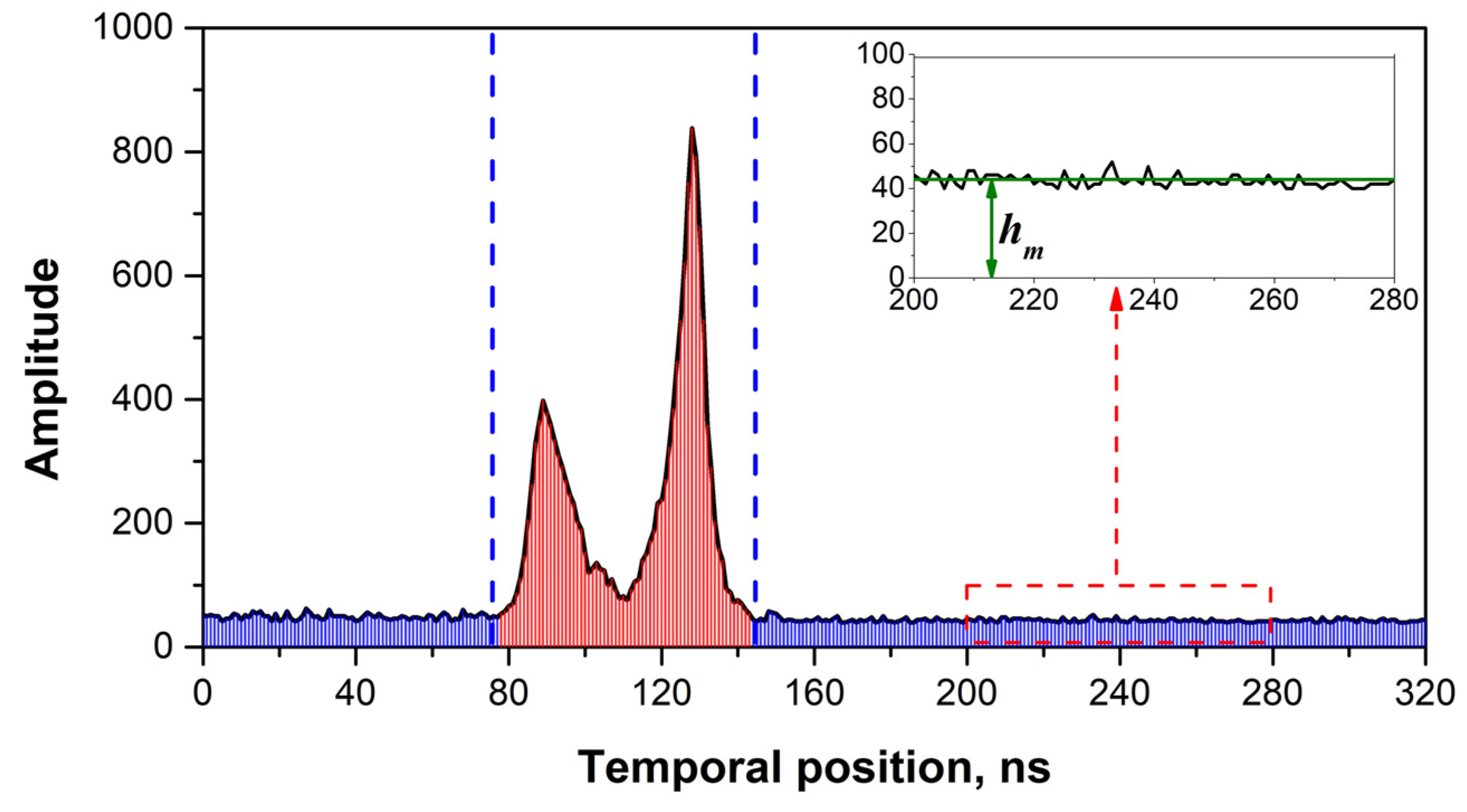
2.1. Signal Segment Detection and Data Channel Selection
2.2. Waveform Denoising and Smoothing
2.3. Iterative Waveform Decomposition
2.4. Detection of Surface and Bottom Water Waveforms
2.5. Gaussian Parameters and Waveform Fitting Optimization
3. Materials
3.1. Single-Beam Bathymetric LiDAR System
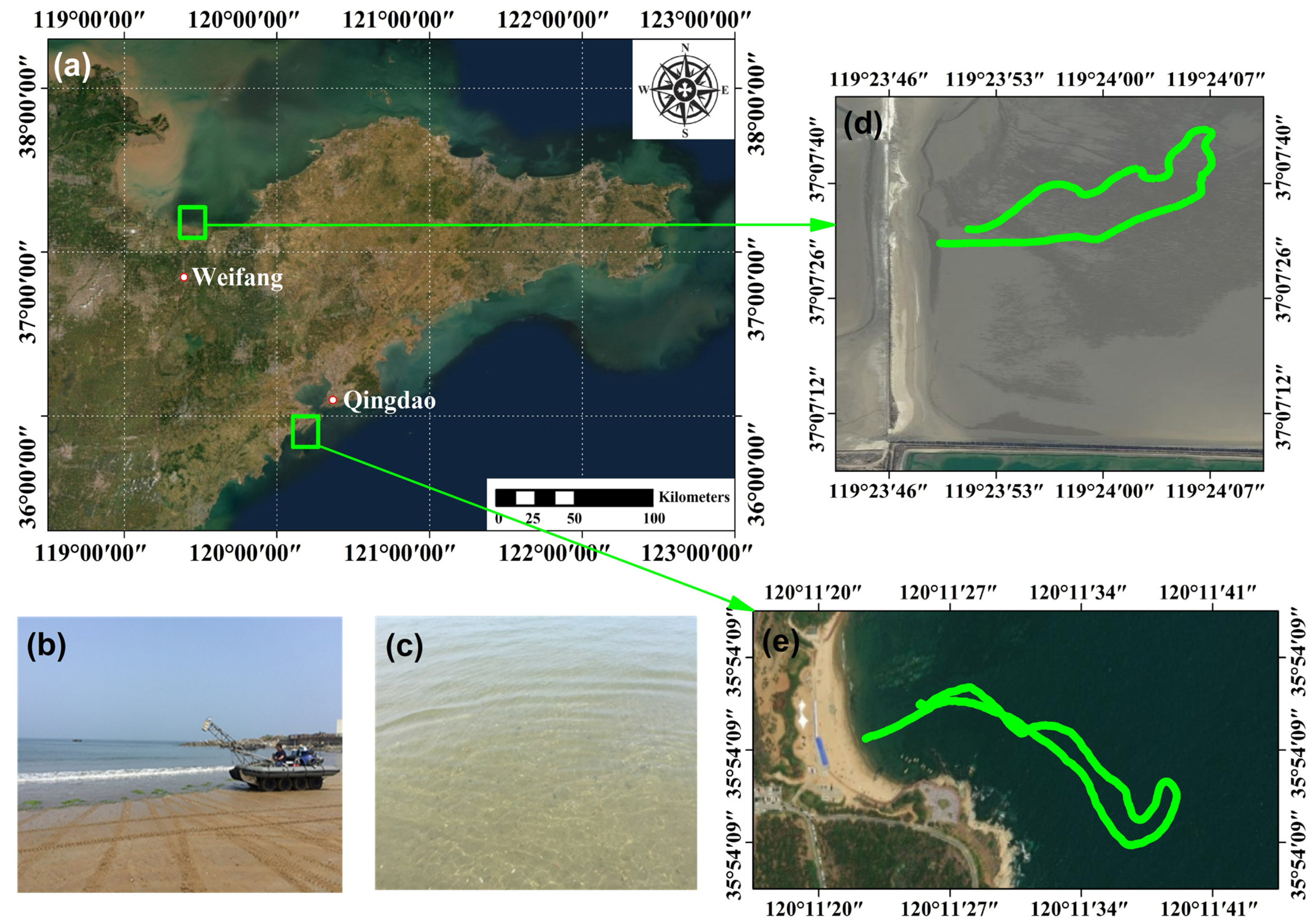
3.2. Study Area and Data Acquisition
4. Results and Discussion
4.1. Signal Segment Extraction and Data Channel Selection
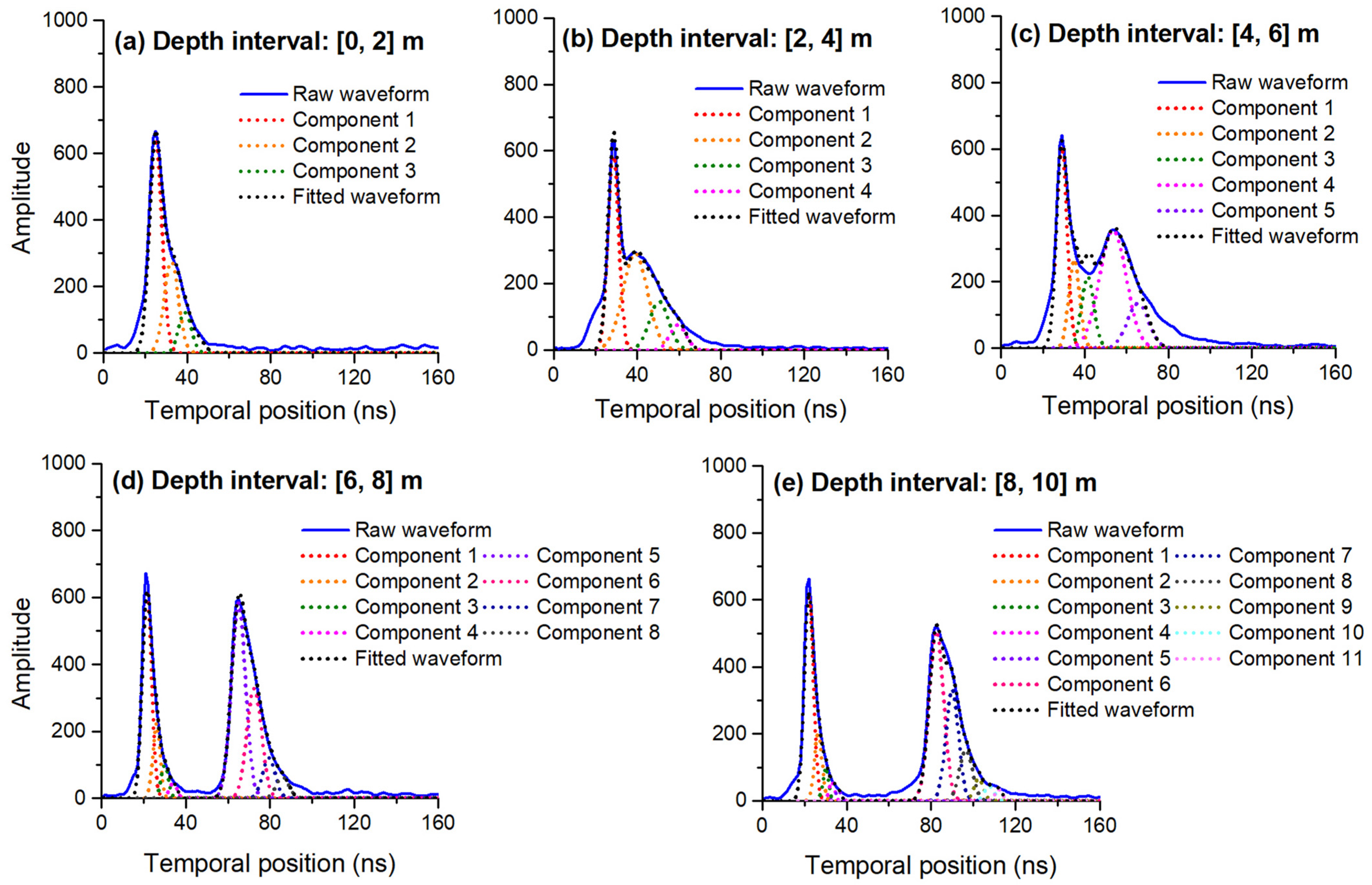
4.2. Waveform Decomposition Results
4.3. Optimization of Waveform Parameters
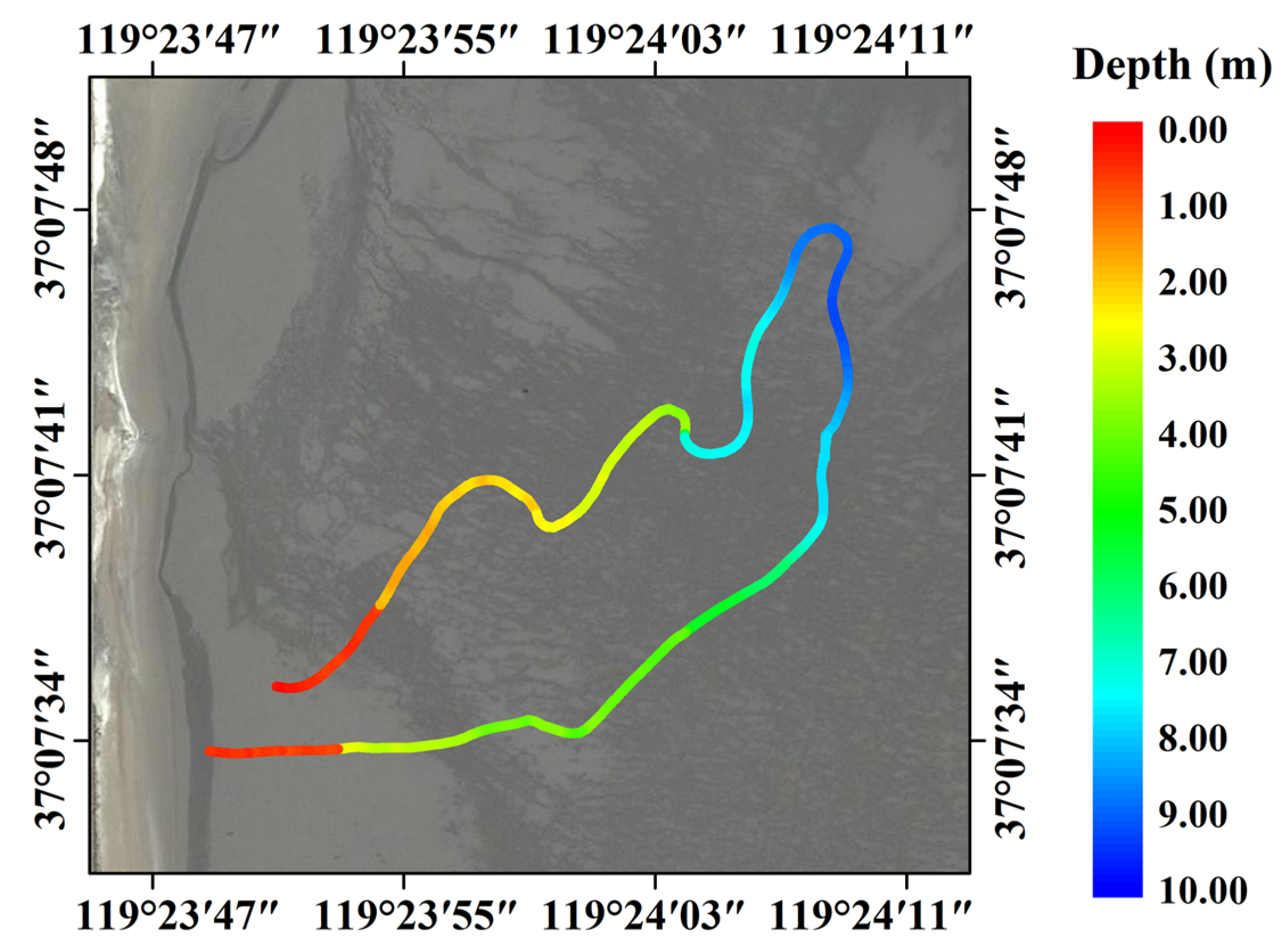
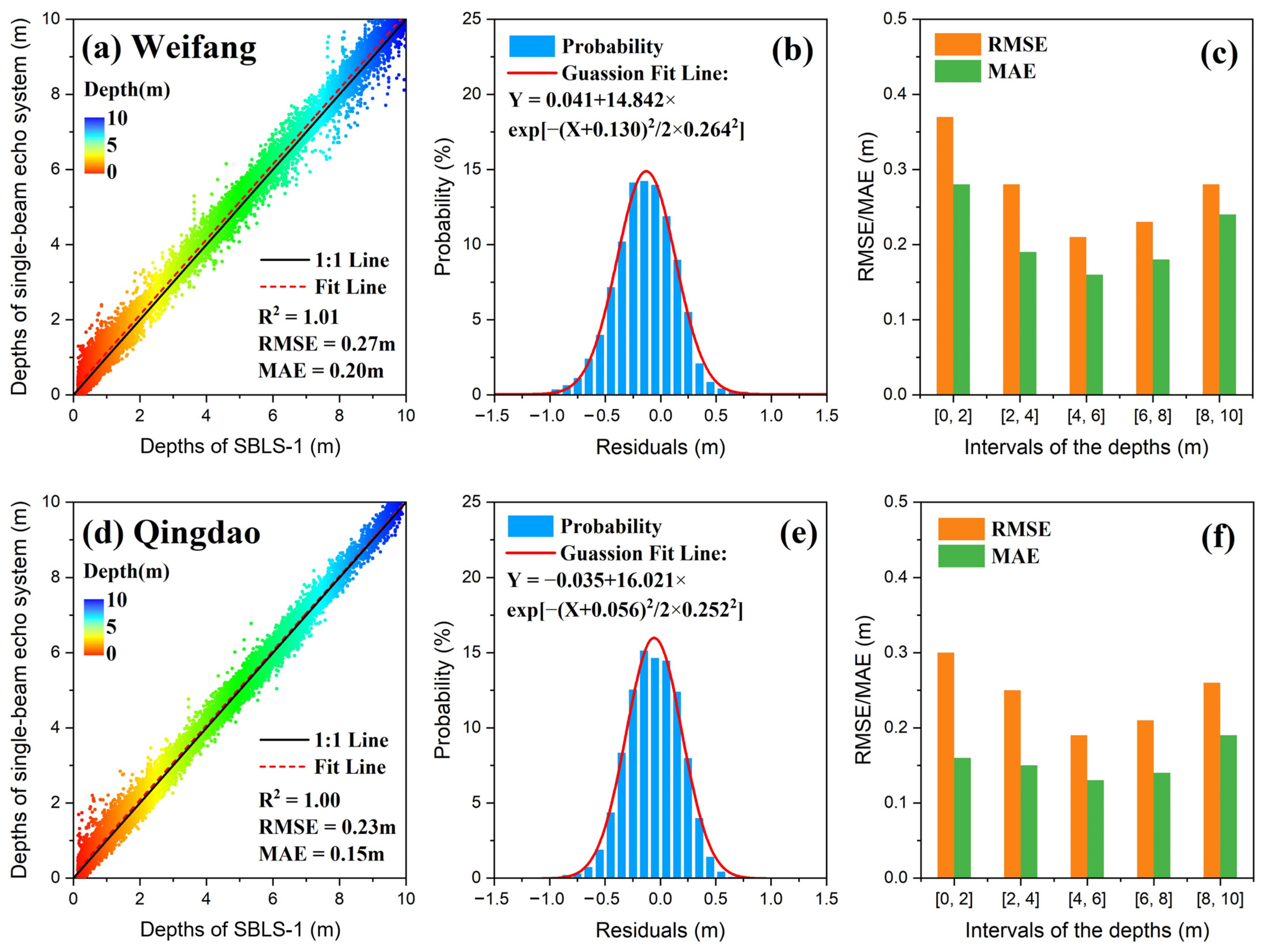
4.4. Bathymetric Results and Accuracy Assessment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Guenther, G.C.; Cunningham, A.G.; Laroque, P.E.; Reid, D.J. Meeting the accuracy challenge in airborne LiDAR bathymetry. In Proceedings of the 20th EARSeL Symposium: Workshop on Lidar Remote Sensing of Land and Sea, Dresden, Germany, 16–17 June 2000. [Google Scholar]
- McKean, J.A.; Isaak, D.J.; Wright, C.W. Geomorphic controls on salmon nesting patterns described by a new, narrow-beam terrestrial–aquatic LiDAR. Front. Ecol. Environ. 2008, 6, 125–130. [Google Scholar] [CrossRef]
- Wang, D.; Xing, S.; He, Y.; Yu, J.; Xu, Q.; Li, P. Evaluation of a New Lightweight UAV-Borne Topo-Bathymetric LiDAR for Shallow Water Bathymetry and Object Detection. Sensors 2022, 22, 1379. [Google Scholar] [CrossRef] [PubMed]
- Kim, M.; Feygels, V.; Kopilevich, Y.; Park, J.Y. Estimation of inherent optical properties from czmil LiDAR. In Proceedings of the SPIE Asia-Pacific Remote Sensing, Beijing, China, 13 October 2014. [Google Scholar]
- Allouis, T.; Bailly, J.S.; Pastol, Y. Comparison of LiDAR waveform processing methods for very shallow water bathymetry using Raman, near-infrared and green signals. Earth Surf. Processes Landf. 2010, 35, 640–650. [Google Scholar] [CrossRef]
- Wu, F.; Jin, D.; Zhang, Z.; Ji, X.; Li, T.; Gao, Y. A preliminary study on land-sea integrated topographic surveying based on CZMIL bathymetric technique. Remote Sens. Nat. Resour. 2021, 4, 173–180. [Google Scholar]
- Vollmer, H.M.; Finkl, C.W.; Makowski, C. Novel method for interpreting submarine geomorphology from LADS bathymetry using Surfer 12 shaded relief maps. J. Coast. Res. 2015, 31, 1268–1274. [Google Scholar] [CrossRef]
- Finkl, C.W.; Vollmer, H.M. Methods for investigating sediment flux under high-energy conditions on the southeast Florida continental shelf using Laser Airborne Depth Sounding (LADS) in a Geographic Information System (GIS) dataframe. J. Coast. Res. 2017, 33, 452–462. [Google Scholar] [CrossRef]
- Guo, K.; Xu, W.X.; Liu, Y.X.; He, X.F. Gaussian half-wavelength progressive decomposition method for waveform processing of airborne laser bathymetry. Remote Sens. 2018, 10, 35. [Google Scholar] [CrossRef] [Green Version]
- Guo, K.; Li, Q.; Wang, C.; Mao, Q.; Liu, Y.; Zhu, J.; Wu, A. Development of a single-wavelength airborne bathymetric LiDAR: System design and data processing. ISPRS J. Photogramm. Remote Sens. 2022, 185, 62–84. [Google Scholar] [CrossRef]
- Birkebak, M.; Eren, F.; Pe’eri, S.; Weston, N. The effect of surface waves on airborne lidar bathymetry (ALB) measurement uncertainties. Remote Sens. 2018, 10, 453. [Google Scholar] [CrossRef] [Green Version]
- Jutzi, B.; Stilla, U. Range determination with waveform recording laser systems using a wiener filter. ISPRS J. Photogramm. Remote Sens. 2006, 61, 95–107. [Google Scholar] [CrossRef]
- Wang, C.; Tang, F.; Li, L.; Li, G.; Feng, C.; Xi, X. Wavelet analysis for icesat/glas waveform decomposition and its application in average tree height estimation. IEEE Geosci. Remote Sens. Lett. 2013, 10, 115–119. [Google Scholar] [CrossRef]
- Mateo-Pérez, V.; Corral-Bobadilla, M.; OrtegaFernández, F.; Rodríguez-Montequín, V. Determination of Water Depth in Ports Using Satellite Data Based on Machine Learning Algorithms. Energies 2021, 14, 2486. [Google Scholar] [CrossRef]
- Klemas, V. Beach profiling and LiDAR bathymetry: An overview with case studies. J. Coast. Res. 2011, 27, 1019–1028. [Google Scholar] [CrossRef]
- Abady, L.; Bailly, J.S.; Baghdadi, N.; Pastol, Y.; Abdallah, H. Assessment of quadrilateral fitting of the water column contribution in LiDAR waveforms on bathymetry estimates. IEEE Geosci. Remote Sens. Lett. 2014, 11, 813–817. [Google Scholar] [CrossRef] [Green Version]
- Cheng, H. Study on the Signal Processing of LiDAR. Ph.D. Thesis, University of Chinese Academy of Sciences, Beijing, China, May 2015. [Google Scholar]
- Legleiter, C.J.; Overstreet, B.T.; Glennie, C.L.; Pan, Z.; Fernandez-Diaz, J.C.; Singhania, A. Evaluating the capabilities of the casi hyperspectral imaging system and aquarius bathymetric LiDAR for measuring channel morphology in two distinct river environments. Earth Surf. Processes Landf. 2016, 41, 344–363. [Google Scholar] [CrossRef]
- Zhou, G.; Deng, R.; Zhou, X.; Long, S.; Li, W.; Lin, G.; Li, X. Gaussian Inflection Point Selection for LiDAR Hidden Echo Signal Decomposition. IEEE Geosci. Remote Sens. Lett. 2022, 19, 6502705. [Google Scholar] [CrossRef]
- Wagner, W.; Ullrich, A.; Melzer, T.; Briese, C.; Kraus, K. From single-pulse to full-waveform airborne laser scanners. Potential Pract. Chall. 2004, 35, 1–206. [Google Scholar]
- Shan, J.; Toth, C.K. Topographic Laser Ranging and Scanning: Principles and Processing. Int. J. Remote Sens. 2010, 31, 3333–3334. [Google Scholar]
- Wang, C.; Li, Q.; Liu, Y. A comparison of waveform processing algorithms for single-wavelength LiDAR bathymetry. ISPRS J. Photogramm. Remote Sens. 2015, 101, 22–35. [Google Scholar] [CrossRef]
- Roncat, A.; Wagner, W.; Melzer, T. Echo detection and localization in full-waveform airborne laser scanner data using the averaged square difference function estimator. Photogramm. J. Finl. 2008, 21, 62–75. [Google Scholar]
- Neuenschwander, A.L. Evaluation of waveform deconvolution and decomposition retrieval algorithms for icesat/glas data. Can. J. Remote Sens. 2008, 34, S240–S246. [Google Scholar] [CrossRef]
- Abdallah, H.; Baghdadi, N.; Bailly, J.S.; Pastol, Y.; Fabre Wa-lid, F. A new LiDAR simulator for waters. IEEE Geosci. Remote Sens. Lett. 2012, 9, 744–748. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.; Aardt, J.A.N.V.; Asner, G.P. A comparison of signal deconvolution algorithms based on small-footprint LiDAR waveform simulation. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2402–2414. [Google Scholar] [CrossRef]
- Ma, H.C.; Li, Q. Modified EM algorithm and its application to the decomposition of laser scanning waveform data. J. Remote Sens. 2009, 13, 35–41. [Google Scholar]
- Richter, K.; Maas, H.G.; Westfeld, P.; Weib, R. An approach to determining turbidity and correcting for signal attenuation in airborne LiDAR bathymetry. PFG–J. Photogramm. Remote Sens. Geoinf. Sci. 2017, 85, 31–40. [Google Scholar] [CrossRef]
- Schwarz, R.; Pfeifer, N.; Pfennigbauer, M.; Ullrich, A. Exponential decomposition with implicit deconvolution of LiDAR backscatter from the water column. PFG—J. Photogramm. Remote Sens. Geoinform. Sci. 2017, 85, 159–167. [Google Scholar] [CrossRef]
- Liu, C.; Li, X.; Huang, J.; Xu, L. B-Spline Based Progressive Decomposition of LiDAR Waveform with Low SNR. IEEE Trans. Instrum. Meas. 2022, 71, 8501812. [Google Scholar] [CrossRef]
- Zhao, X.Z.; Zhao, J.H.; Zhang, H.M.; Zhou, F.N. Remote sensing of suspended sediment concentrations based on the waveform decomposition of airborne LiDAR bathymetry. Remote Sens. 2018, 10, 247. [Google Scholar] [CrossRef] [Green Version]
- Roland, S.; Gottfried, M.; Martin, P. Design and evaluation of a full-wave surface and bottom-detection algorithm for LiDAR bathymetry of very shallow waters. ISPRS J. Photogramm. Remote Sens. 2019, 150, 1–10. [Google Scholar]
- Fernandez-Diaz, J.C.; Glennie, C.L.; Carter, W.E.; Shrestha, R.L.; Sartori, M.P.; Singhania, A.; Legleiter, C.J.; Overstreet, B.T. Early results of simultaneous terrain and shallow water bathymetry mapping using a single-wavelength airborne LiDAR sensor. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2014, 7, 623–635. [Google Scholar] [CrossRef]
- Genchi, S.A.; Vitale, A.J.; Perillo, G.M.E.; Seitz, C.; Delrieux, C.A. Mapping topobathymetry in a shallow tidal environment using low-cost technology. Remote Sens. 2020, 12, 1394. [Google Scholar] [CrossRef]
- Xu, F.; Li, F.; Wang, Y. Modified Levenberg–Marquardt-based optimization method for LiDAR waveform decomposition. IEEE Geosci. Remote Sens. Lett. 2016, 13, 530–534. [Google Scholar] [CrossRef]
- Qin, H.; Wang, C.; Xi, X.; Tian, J.; Zhou, G. Estimation of coniferous forest aboveground biomass with aggregated airborne small-footprint LiDAR full-waveforms. Opt. Express. 2017, 25, A851. [Google Scholar] [CrossRef] [PubMed]
- Yu, J.; Lu, X.; Tian, M.; Chan, T.; Chen, C. Automatic extrinsic self-calibration of mobile LiDAR systems based on planar and spherical features. Meas. Sci. Technol. 2021, 32, 65107. [Google Scholar] [CrossRef]
- Kinzel, P.J.; Legleiter, C.J.; Grams, P.E. Field evaluation of a compact, polarizing topo-bathymetric lidar across a range of river conditions. River Res. Appl. 2021, 37, 531–543. [Google Scholar] [CrossRef]
- Yang, F.; Qi, C.; Su, D.; Ding, S.; He, Y.; Ma, Y. An airborne LiDAR bathymetric waveform decomposition method in very shallow water: A case study around Yuanzhi Island in the South China Sea. Int. J. Appl. Earth Obs. Geoinf. 2022, 109, 102788. [Google Scholar] [CrossRef]
- Li, J.; Tao, B.; He, Y.; Li, Y.; Huang, H.; Mao, Z.; Yu, J. Range Difference Between Shallow and Deep Channels of Airborne Bathymetry LiDAR with Segmented Field-of-View Receivers. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5703616. [Google Scholar] [CrossRef]
- Aarno, T.K.; Anu, M.K. Comparison of airborne LiDAR and shipboard acoustic data in complex shallow water environments: Filling in the white ribbon zone. Mar. Geology. 2017, 385, 250–259. [Google Scholar]
- Zhou, G.; Long, S.; Xu, J.; Zhou, X.; Song, B.; Deng, R.; Wang, C. Comparison Analysis of Five Waveform Decomposition Algorithms for the Airborne LiDAR Echo Signal. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2021, 14, 7869–7880. [Google Scholar] [CrossRef]
- Gu, Z.; Lai, J.; Wang, C.; Yan, W.; Ji, Y.; Li, Z. Generalized Gaussian decomposition for full waveform LiDAR processing. Meas. Sci. Technol. 2022, 33, 65201. [Google Scholar] [CrossRef]
- Wagner, W. Gaussian decomposition and calibration of a novel small-Footprint full-waveform digitizing airborne laser scanner. ISPRS J. Photogramm. Remote Sens. 2006, 60, 100–112. [Google Scholar] [CrossRef]
- Mandlburger, G.; Pfennigbauer, M.; Pfeifer, N. Analyzing near water surface penetration in laser bathymetry—A case study at the River Pielach. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 5, W2. [Google Scholar] [CrossRef] [Green Version]
- Ding, K.; Li, Q.; Zhu, J.; Wang, C.; Guan, M.; Chen, Z.; Yang, C.; Cui, Y.; Liao, J. An Improved Quadrilateral Fitting Algorithm for the Water Column Contribution in Airborne Bathymetric Lidar Waveforms. Sensors 2018, 18, 552. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhao, J.; Zhao, X.; Zhang, H.; Zhou, F. Shallow Water Measurements Using a Single Green Laser Corrected by Building a Near Water Surface Penetration Model. Remote Sens. 2017, 9, 426. [Google Scholar] [CrossRef] [Green Version]
- Lin, Y.C.; Mills, J.P.; Smith-Voysey, S. Rigorous pulse detection from full-waveform airborne laser scanning data. Int. J. Remote Sens. 2010, 31, 1303–1324. [Google Scholar] [CrossRef]
- HD-MAX Series Product Manual Version 3.0; Hi-Target Co., Ltd.: Guanzhou, China, 2018.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Payload Parameter | Indicator |
|---|---|
| Laser wavelength | 532 nm |
| Mission/repetition frequency | 100 Hz |
| Pulse width | 10 ns |
| Pulse energy | 5–20 μJ |
| Beam quality | M2 < 1.3 |
| Test Field | Water Depth Interval (m) | 0–2 | 2–4 | 4–6 | 6–8 | 8–10 | All Depths |
|---|---|---|---|---|---|---|---|
| Weifang | Average of components | 2.81 | 4.46 | 5.51 | 7.89 | 11.31 | 6.40 |
| Qingdao | Average of components | 2.47 | 3.82 | 5.69 | 7.35 | 10.56 | 5.98 |
| Test Fields | Water Depth Interval (m) | 0–2 | 2–4 | 4–6 | 6–8 | 8–10 | Average |
|---|---|---|---|---|---|---|---|
| Weifang | Mean difference | 9.98 | 9.93 | 9.61 | 9.37 | 8.94 | 9.57 |
| Standard deviation | 17.35 | 14.98 | 15.21 | 14.55 | 14.31 | 15.28 | |
| Qingdao | Mean difference | 10.06 | 10.01 | 9.85 | 9.25 | 9.06 | 9.65 |
| Standard deviation | 17.54 | 15.16 | 15.73 | 14.79 | 14.58 | 15.56 |
| Depths (m) | Surface Water Component Parameters | Bottom Water Component Parameters | ||||
|---|---|---|---|---|---|---|
| 0–1 | −32.6806 | −0.0936 | −0.0392 | 3.9347 | −3.3688 | 5.7151 |
| 1–2 | −50.3521 | −0.2373 | −0.1994 | −2.8398 | −4.7588 | 14.8659 |
| 2–3 | −28.5767 | −0.2283 | −0.1016 | −3.8268 | −3.6163 | 19.4317 |
| 3–4 | −25.7544 | −0.0282 | −0.0796 | −4.5703 | −2.2698 | 24.2711 |
| 4–5 | −28.9198 | −0.0371 | −0.0725 | −4.9651 | 0.7894 | 27.6308 |
| 5–6 | −23.4521 | −0.0310 | −0.0356 | −3.5320 | 0.1575 | 19.1554 |
| 6–7 | −17.061 | −0.0443 | −0.0142 | −2.6841 | −0.7002 | 14.5734 |
| 7–8 | −13.2486 | −0.0015 | −0.0130 | −1.9060 | −1.1391 | 12.8616 |
| 8–9 | −11.6182 | −0.0099 | −0.0129 | −1.6366 | −2.0384 | 8.3779 |
| 9–10 | −12.2738 | −0.0020 | −0.0122 | −1.8312 | −0.3261 | 8.8003 |
| Test Fields | Trajectory Length (m) | Number of Echo Waveforms | Detection Ratio (%) | Laser Point Density (Points/m) |
|---|---|---|---|---|
| Weifang | 3671.4 | 102,454 | 81% | 22.6 |
| Qingdao | 1781.5 | 84,579 | 87% | 41.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Le, Y.; Wu, L.; Li, S.; Wang, L. An Assessment of Waveform Processing for a Single-Beam Bathymetric LiDAR System (SBLS-1). Sensors 2022, 22, 7681. https://doi.org/10.3390/s22197681
Chen Y, Le Y, Wu L, Li S, Wang L. An Assessment of Waveform Processing for a Single-Beam Bathymetric LiDAR System (SBLS-1). Sensors. 2022; 22(19):7681. https://doi.org/10.3390/s22197681
Chicago/Turabian StyleChen, Yifu, Yuan Le, Lin Wu, Shuai Li, and Lizhe Wang. 2022. "An Assessment of Waveform Processing for a Single-Beam Bathymetric LiDAR System (SBLS-1)" Sensors 22, no. 19: 7681. https://doi.org/10.3390/s22197681