

An Improved Adaptive Median Filtering Algorithm for Radar Image Co-Channel Interference Suppression


Abstract
:1. Introduction
- Based on the source of radar co-channel interference and the storage form of radar echo data, the Laplace operator is improved to better identify radial interference.
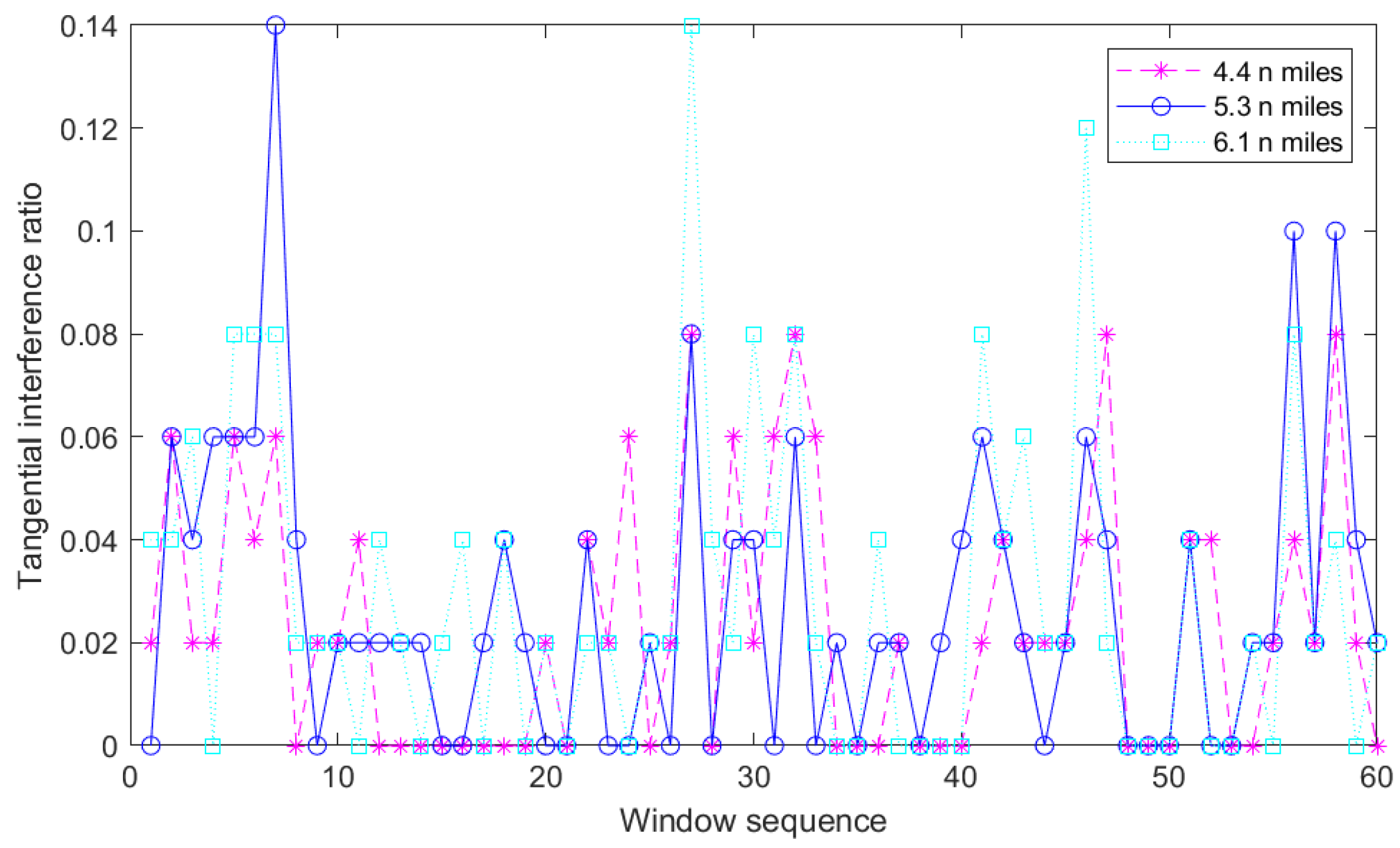
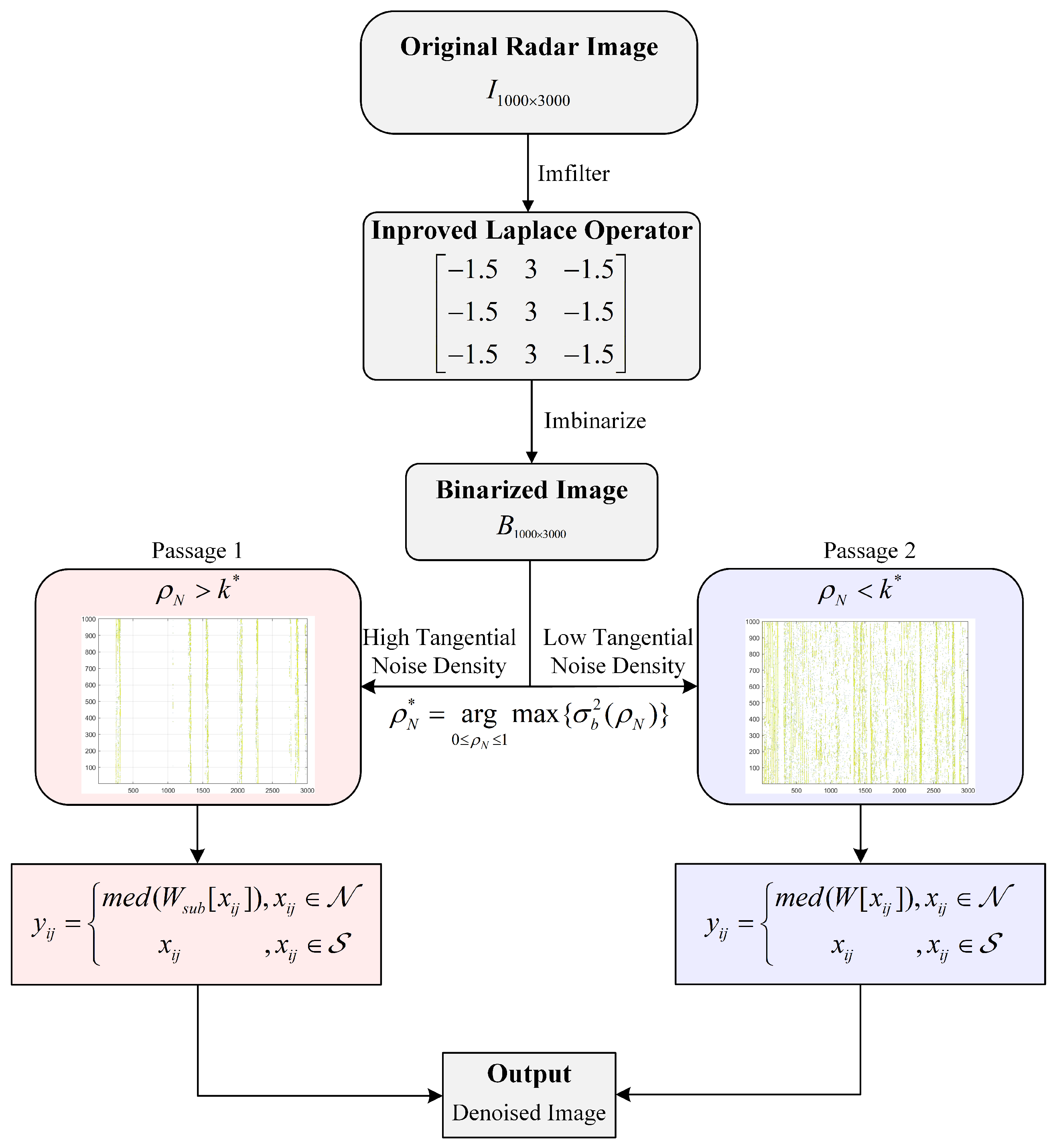
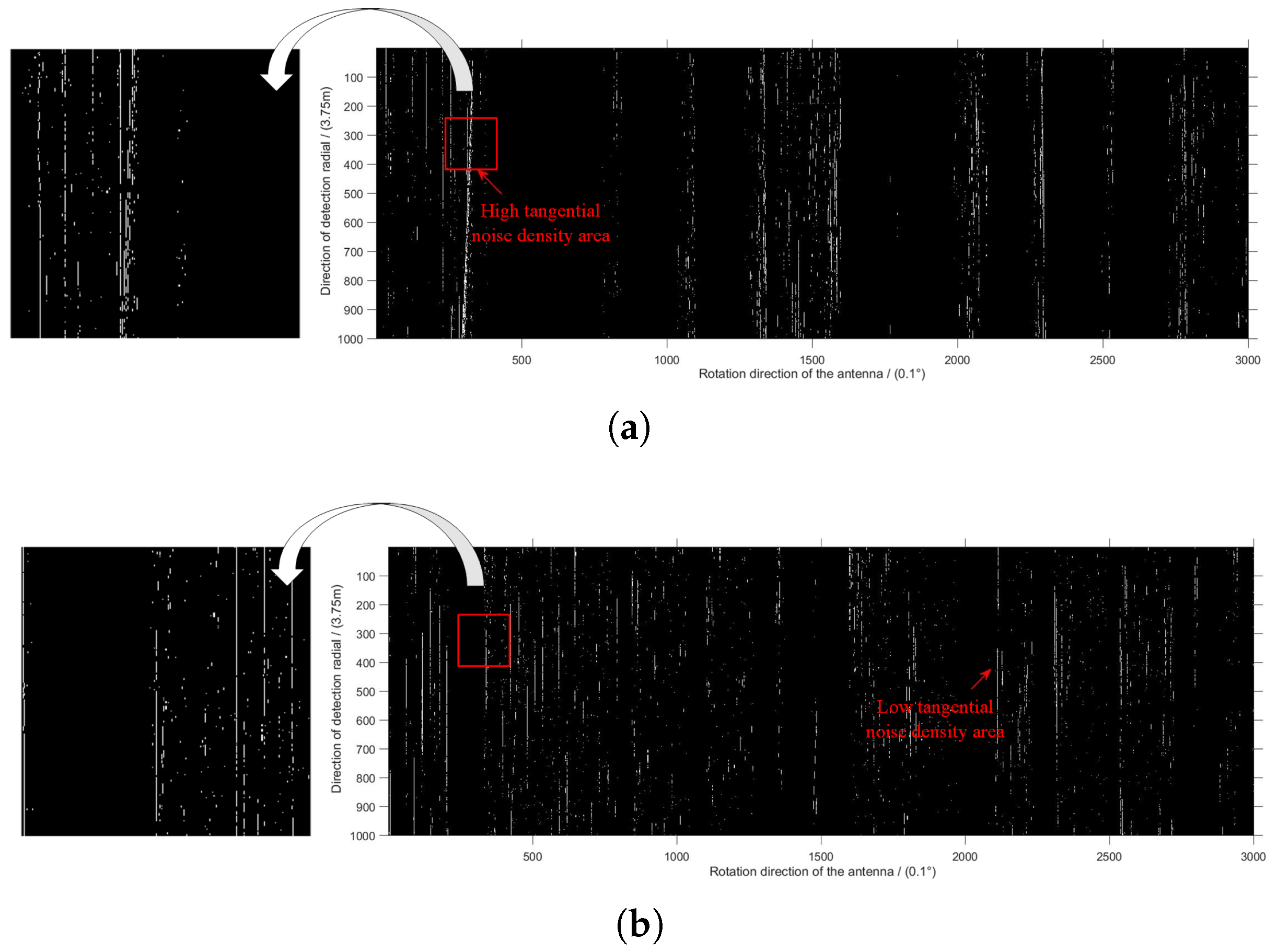
- Radar images are processed with the improved Laplace operator and binarized to establish the tangential interference ratio model. Based on the idea of between-class variance, the tangential interference ratio threshold is determined, which provides a classification basis for different filtering methods in high-ratio regions and low ones.
- We explore the improved adaptive median filtering algorithm, using different filtering windows for high-ratio regions and low ones. On the basis of protecting the details of radar echo images to the maximum extent, the gray values of interference points are replaced with the median of pixel points in the adaptive window.
2. Improvement of Laplace Operator
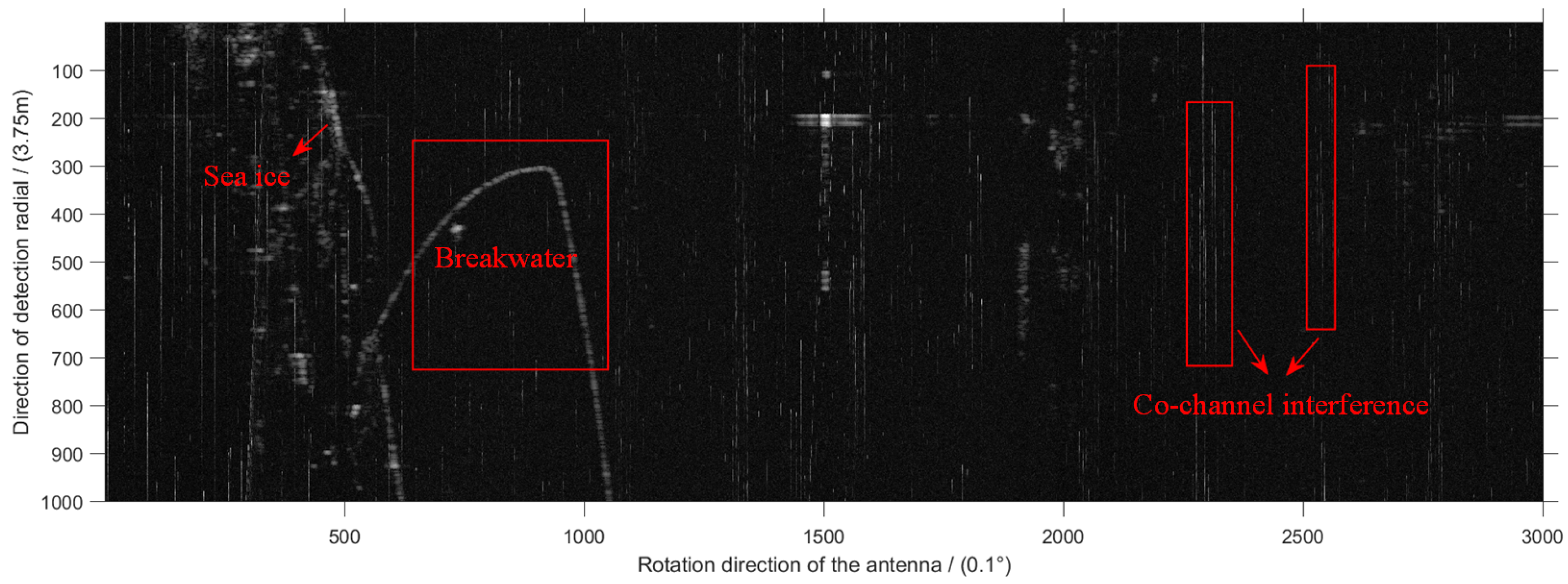
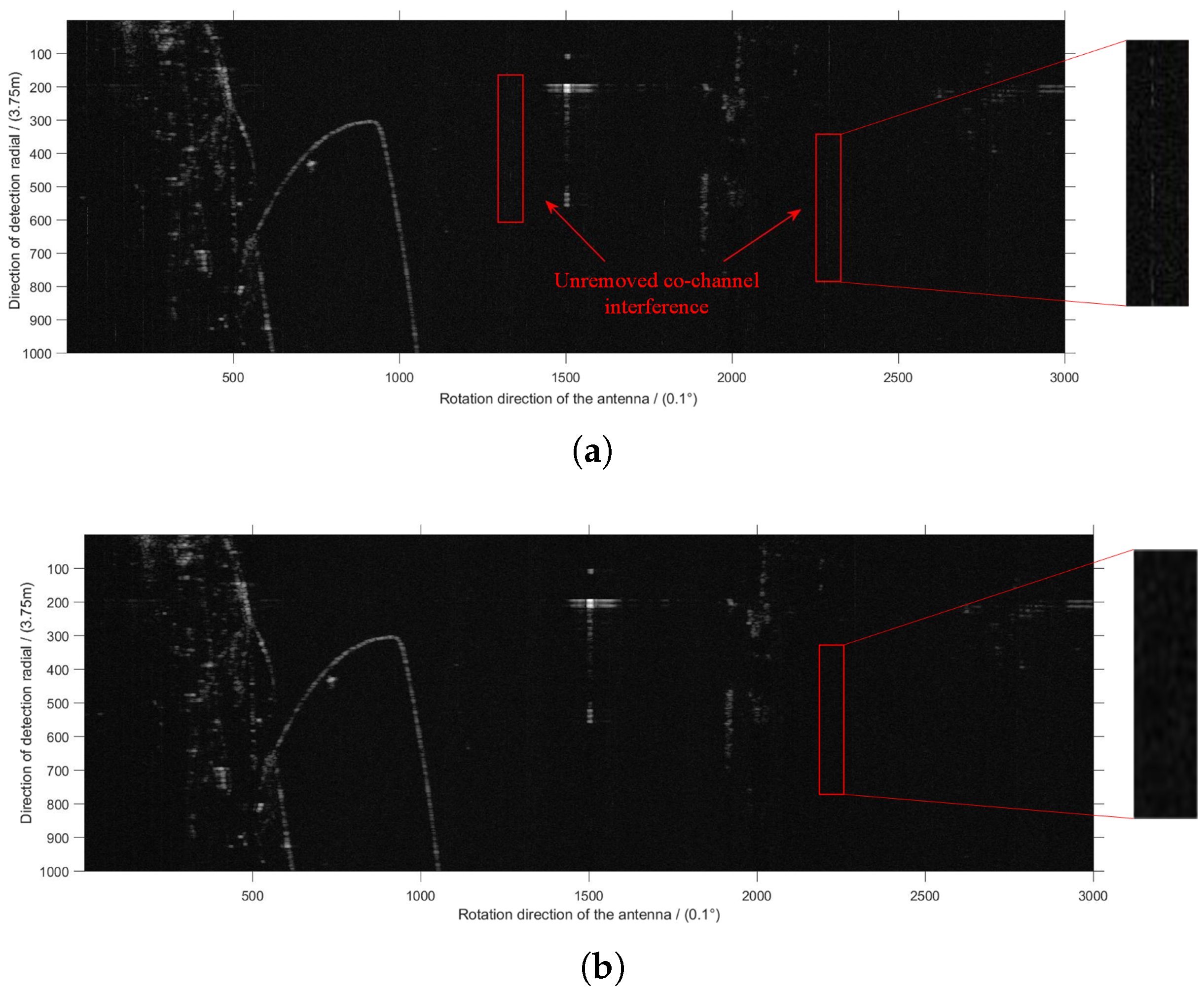
2.1. Characteristics of Co-Channel Interference
2.2. Improvement of Laplace Operator
3. Improved Algorithm
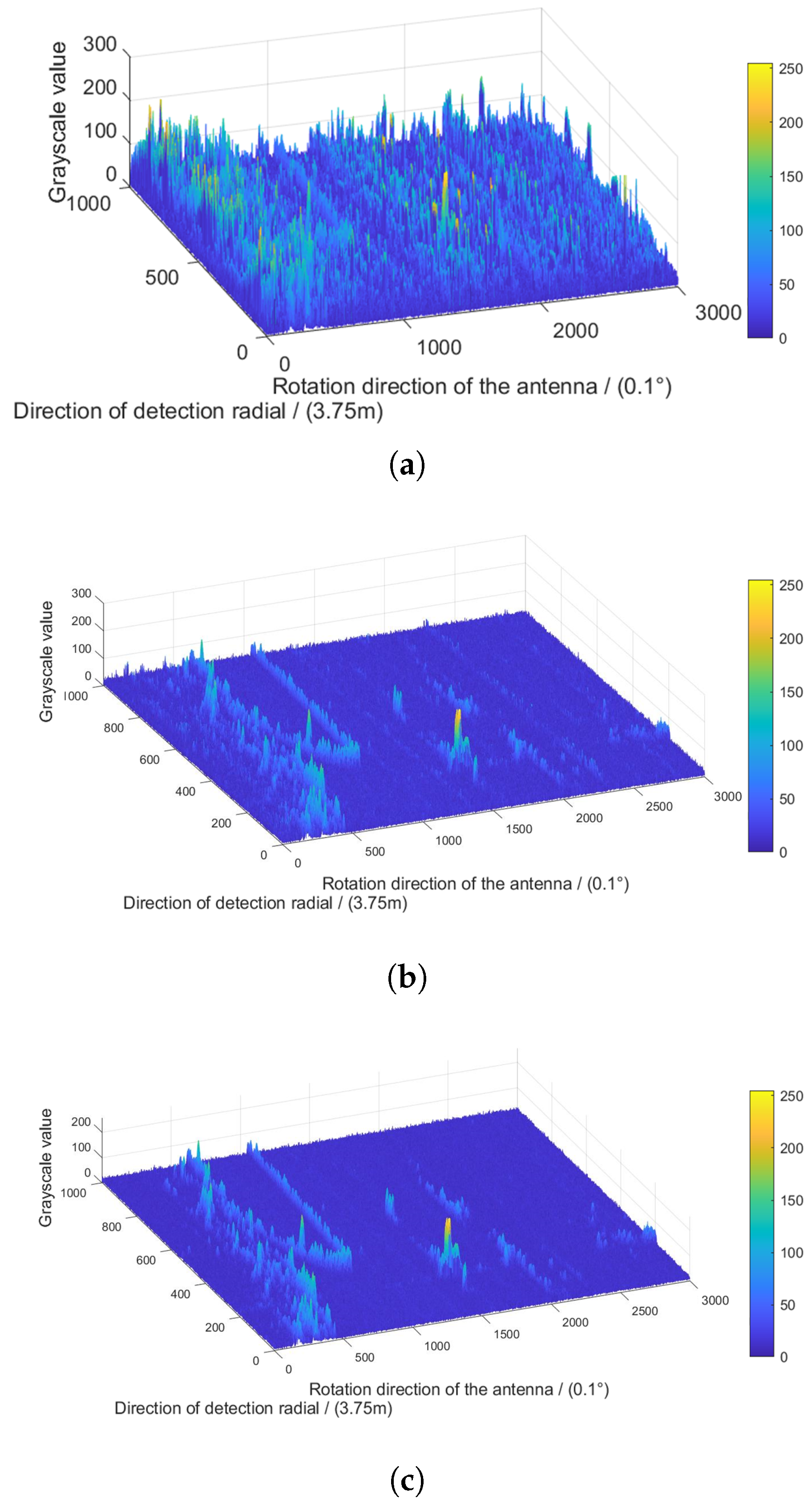
3.1. Radar Image Collection and Analysis
3.2. Median Filtering Algorithm
| Algorithm 1 Median filtering algorithm |
|
3.3. Model Construction
| Algorithm 2 Tangential interference ratio model construction |
|
3.4. Improvement of Median Filtering Algorithm
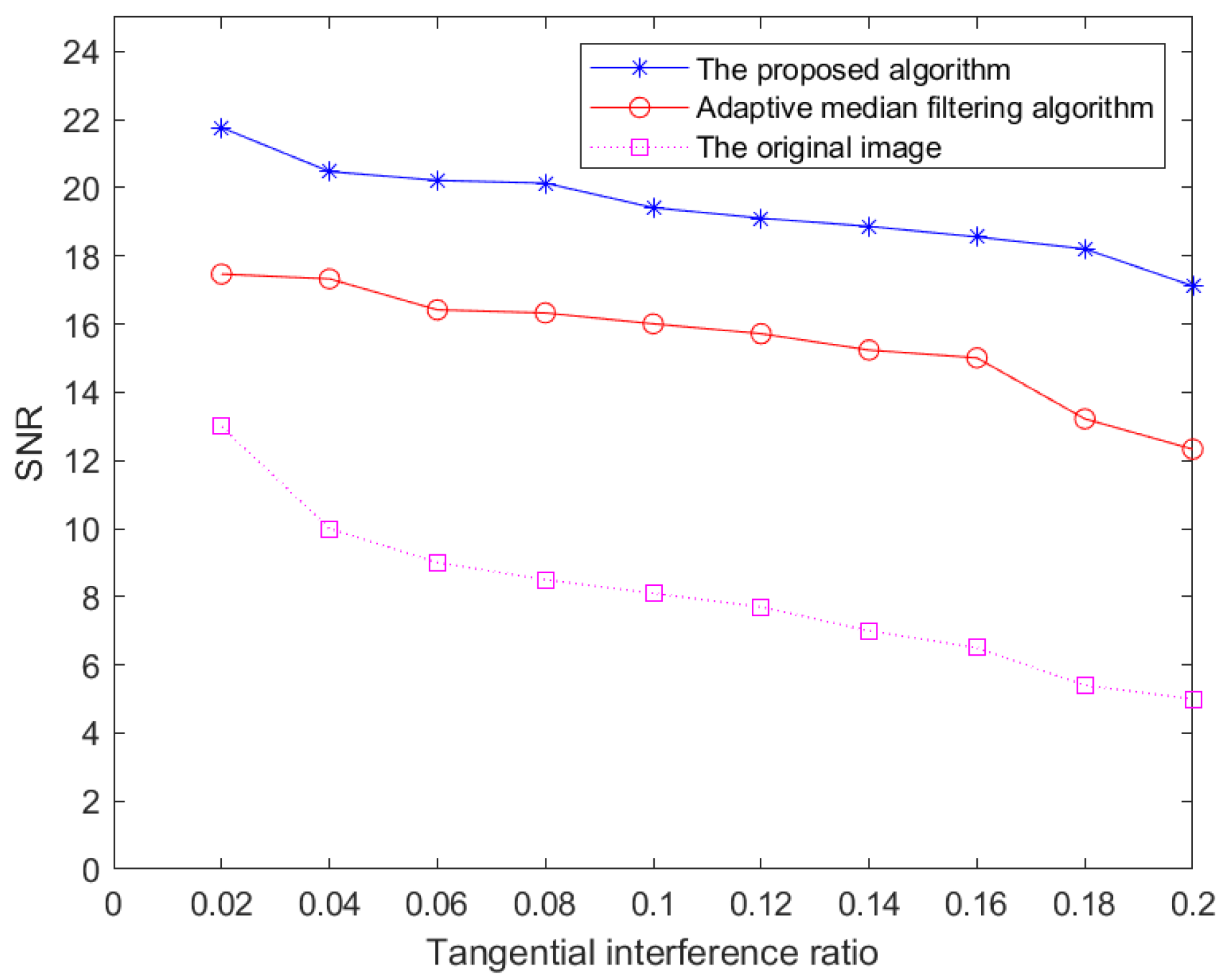
4. Experiment and Simulation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zheng, Y.; Shi, Z.; Lu, Z.; Ma, W. A method for detecting rainfall from X-band marine radar images. IEEE Access 2020, 8, 19046–19057. [Google Scholar] [CrossRef]
- Lund, B.; Graber, H.C.; Romeiser, R. Wind retrieval from shipborne nautical X-band radar data. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3800–3811. [Google Scholar] [CrossRef]
- Bell, P.S. Shallow water bathymetry derived from an analysis of X-band marine radar images of waves. Coast. Eng. 1999, 37, 513–527. [Google Scholar] [CrossRef]
- Holm, D.D.; Hu, R.; Street, O.D. Ponderomotive coupling of waves to sea surface currents via horizontal density gradients. arXiv 2022, arXiv:2202.04446. [Google Scholar]
- Tsubono, T. Diagram statistically displaying model performance for tides or quasi-periodic oscillations. Deep Sea Res. Part I 2022, 180, 103686. [Google Scholar] [CrossRef]
- Howell, S.; Brady, M.; Komarov, A. Large-scale arctic sea ice motion from Sentinel-1 and the RADARSAT constellation mission. In Proceedings of the EGU General Assembly 2021, Online, 19–30 April 2021. [Google Scholar]
- Krohling, R.A.; Campanharo, V.C. Fuzzy topsis for group decision making: A case study for accidents with oil spill in the sea. Expert Syst. Appl. 2011, 38, 4190–4197. [Google Scholar] [CrossRef]
- Liu, P.; Li, Y.; Xu, J.; Zhu, X. Adaptive enhancement of X-band marine radar imagery to detect oil spill segments. Sensors 2017, 17, 2349. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gao, Y.; Dai, J.; Wu, Z.; Zhang, T.; Xu, K. Low phase noise coherent transceiver front-end for X-band multichannel chirped radar based on phase-synchronous optoelectronic oscillator. Opt. Commun. 2019, 460, 125194. [Google Scholar] [CrossRef]
- Chen, Z.; Xie, F.; Chen, Z.; He, C. Radio frequency interference mitigation for high-frequency surface wave radar. IEEE Geosci. Remote Sens. Lett. 2018, 15, 986–990. [Google Scholar] [CrossRef]
- Alabaster, C.M. Suppression of co-channel interference in high duty ratio pulsed radar receivers. In Proceedings of the IET Radar 2017, Belfast, UK, 23–26 October 2017. [Google Scholar]
- Ge, Z.; Sun, X.; Ren, W.; Chen, W.; Xu, G. Improved algorithm of radar pulse repetition interval deinterleaving based on pulse correlation. IEEE Access 2019, 7, 30126–30134. [Google Scholar] [CrossRef]
- Aslam, H.; Mortula, M.M.; Yehia, S.; Ali, T.; Kaur, M. Evaluation of the factors impacting the water pipe leak detection ability of GPR, infrared cameras, and spectrometers under controlled conditions. Appl. Sci. 2022, 12, 1683. [Google Scholar] [CrossRef]
- Song, Y.; Liu, J. An improved adaptive weighted median filter algorithm. J. Phys. Conf. Ser. 2019, 1187, 042107. [Google Scholar] [CrossRef]
- Deshe, G.; Abookasis, D. Imaging targets hidden in scattering and viscous liquid-based media by combining multiple projections and applying a non-local mean filtering algorithm. Optik 2021, 247, 167988. [Google Scholar] [CrossRef]
- Cuomo, S.; Michele, P.D.; Piccialli, F. 3D data denoising via nonlocal means filter by using parallel GPU strategies. Comput. Math. Methods Med. 2014, 2014, 523862. [Google Scholar] [CrossRef] [Green Version]
- Xiao, H.; Guo, B.; Zhang, H.; Li, C. A parallel algorithm of image mean filtering based on OpenCL. IEEE Access 2021, 9, 65001–65016. [Google Scholar] [CrossRef]
- Park, C.R.; Kang, S.H.; Lee, Y. Median modified wiener filter for improving the image quality of gamma camera images. Nucl. Eng. Technol. 2020, 52, 2328–2333. [Google Scholar] [CrossRef]
- Salehi, H.; Vahidi, J.; Abdeljawad, T.; Khan, A.; Rad, S.Y.B. A SAR image despeckling method based on an extended adaptive wiener filter and extended guided filter. Remote Sens. 2020, 12, 2371. [Google Scholar] [CrossRef]
- Santos, J.C.M.; Carrijo, G.A. Fundus image quality enhancement for blood vessel detection via a neural network using CLAHE and wiener filter. Res. Biomed. Eng. 2020, 36, 107–119. [Google Scholar] [CrossRef]
- Vázquez-Bautista, R.F.; Morales-Mendoza, L.J.; Ortega-Almanza, R.; Blanco-Ortega, A. Adaptive algorithm-based fused bayesian maximum entropy-variational analysis methods for eEnhanced radar imaging. In Proceedings of the MCPR 2010, Puebla, Mexico, 27–29 September 2010. [Google Scholar]
- Islam, S.M.M.; Lubecke, L.C.; Grado, C.; Lubecke, V.M. An adaptive filter technique for platform motion compensation in unmanned aerial vehicle based remote life sensing radar. In Proceedings of the 2020 50th European Microwave Conference (EuMC), Utrecht, The Netherlands, 12–14 January 2021. [Google Scholar]
- Luo, W. Efficient removal of impulse noise from digital images. IEEE Trans. Consum. Electron. 2006, 52, 523–527. [Google Scholar]
- Singh, V.; Dev, R.; Dhar, N.K.; Agrawal, P.; Verma, N.K. Adaptive Type-2 fuzzy approach for filtering salt and pepper noise in grayscale images. IEEE Trans. Fuzzy Syst. 2018, 26, 3170–3176. [Google Scholar] [CrossRef]
- Jia, Z. Exploiting opportunistic network coding for improving wireless reliability against co-channel interference. IEEE Trans. Ind. Inf. 2016, 12, 1692–1701. [Google Scholar]
- Jost, J.; Mulas, R. Normalized Laplace operators for hypergraphs with real coefficients. J. Complex Netw. 2021, 9, cnab009. [Google Scholar] [CrossRef]
- Waheed, W.; Deng, G.; Liu, B. Discrete Laplacian operator and its applications in signal processing. IEEE Access 2016, 8, 89692–89707. [Google Scholar] [CrossRef]
- Gavili, A.; Zhang, X. On the shift operator, graph frequency, and optimal filtering in graph signal processing. IEEE Trans. Signal Process. 2017, 65, 6303–6318. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Zhan, Y.; Cao, H. Adaptive sequentially weighted median filter for image highly corrupted by impulse noise. IEEE Access 2019, 7, 158545–158556. [Google Scholar] [CrossRef]
- Luo, S.; Peng, A.; Zeng, H.; Kang, X.; Liu, L. Deep residual learning using data augmentation for median filtering forensics of digital images. IEEE Access 2019, 7, 80614–80621. [Google Scholar] [CrossRef]
- Monajati, M.; Kabir, E. A modified inexact arithmetic median filter for removing salt-and-pepper noise from gray-level images. IEEE Trans. Circuits Syst. II Express Briefs 2019, 67, 750–754. [Google Scholar] [CrossRef]
- Xing, C.; Wang, S.; Deng, H. A new filtering algorithm based on extremum and median value. J. Image Graph. 2001, 6, 533–536. [Google Scholar]
- Sun, T.; Neuvo, Y. Detail-preserving median based filters in image processing. Pattern Recognit. Lett. 1994, 15, 341–347. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, D. Progressive switching median filter for the removal of impulse noise from highly corrupted images. IEEE Trans. Circuits Syst. II Express Briefs 1999, 465, 78–80. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Lin, L. Improved median filter using minmax algorithm for image processing. Electron. Lett. 1997, 33, 1362–1363. [Google Scholar] [CrossRef]
- Brownrigg, D.R.K. The weighted median filter. Commun. ACM 1984, 27, 807–818. [Google Scholar] [CrossRef]
- Lin, Y.; Diao, Y.; Du, Y.; Zhang, J.; Li, L.; Liu, P. Automatic cell counting for phase-contrast microscopic images based on a combination of Otsu and watershed segmentation method. Microsc. Res. Tech. 2022, 85, 169–180. [Google Scholar] [CrossRef] [PubMed]
- Chang, Y. Improving the Otsu method for MRA image vessel extraction via resampling and ensemble learning. Healthc. Technol. Lett. 2019, 6, 115–120. [Google Scholar] [CrossRef] [PubMed]
- Kao, Y.; Teng, M.M.-H.; Zheng, W.; Chang, F.; Chen, Y. Removal of CSF pixels on brain MR perfusion images using first several images and Otsu’s thresholding technique. Magn. Reson. Med. 2010, 64, 743–748. [Google Scholar] [CrossRef] [PubMed]
- Liu, P.; Li, Y.; Liu, B.; Chen, P.; Xu, J. Semi-automatic oil spill detection on X-band marine radar images using texture analysis, machine learning, and adaptive thresholding. Remote Sens. 2019, 11, 756. [Google Scholar] [CrossRef] [Green Version]
- Atsushi, Y.; Shigenori, U. A discriminant-based RMSE improvement technique for classical prony method in small array radars. In Proceedings of the 2020 17th European Radar Conference (EuRAD), Utrecht, The Netherlands, 10–15 January 2021. [Google Scholar]
- Shang, X.; Liang, J.; Wang, G.; Zhao, H.; Wu, C.; Lin, C. Color-sensitivity-based combined PSNR for objective video quality assessment. IEEE Trans. Circuits Syst. Video Technol. 2018, 29, 1239–1250. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Adaptive Median Filtering Algorithm | Improved Algorithm | ||||
|---|---|---|---|---|---|---|
| RMSE | PSNR | SNR | RMSE | PSNR | SNR | |
| 1 | 3.2669 | 42.9895 | 11.7073 | 2.2625 | 44.5849 | 14.3718 |
| 2 | 3.3671 | 42.8582 | 11.4970 | 2.2543 | 44.6008 | 17.4794 |
| 3 | 3.4815 | 42.7131 | 11.4867 | 2.1845 | 44.7372 | 15.1643 |
| 4 | 3.5736 | 42.5998 | 11.2664 | 2.1168 | 44.8740 | 15.5058 |
| 5 | 3.7216 | 42.4235 | 11.2098 | 2.1660 | 44.7742 | 15.6986 |
| 6 | 3.7948 | 42.3389 | 10.8543 | 2.1527 | 44.8009 | 15.4729 |
| 7 | 3.8089 | 42.3228 | 10.9757 | 2.2140 | 44.6791 | 15.4185 |
| 8 | 3.8290 | 42.3000 | 10.6038 | 2.1050 | 44.8984 | 15.4398 |
| 9 | 3.8306 | 42.2981 | 10.6602 | 1.9375 | 45.2584 | 16.2738 |
| 10 | 3.9080 | 42.2112 | 10.6859 | 2.1595 | 44.7872 | 15.5649 |
| 11 | 3.9200 | 42.1979 | 10.8312 | 1.8700 | 45.4124 | 17.0951 |
| 12 | 3.9502 | 42.1646 | 10.8808 | 1.7030 | 45.8187 | 18.0732 |
| 13 | 3.9571 | 42.1570 | 10.6083 | 1.8101 | 45.5537 | 17.2207 |
| 14 | 3.9592 | 42.1548 | 10.3614 | 1.8407 | 45.4809 | 16.7618 |
| 15 | 3.9642 | 42.1493 | 10.2517 | 2.3126 | 44.4897 | 14.5196 |
| 16 | 3.9912 | 42.1198 | 10.3289 | 1.8404 | 45.4818 | 16.8225 |
| 17 | 3.9947 | 42.1160 | 10.7881 | 1.8982 | 45.3747 | 17.1216 |
| 18 | 4.0455 | 42.0611 | 10.4583 | 1.7304 | 45.7493 | 17.6863 |
| 19 | 4.0469 | 42.0596 | 10.2852 | 1.7037 | 45.8168 | 17.6102 |
| 20 | 4.0696 | 42.0353 | 10.4553 | 1.7924 | 45.5965 | 17.4258 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, N.; Liu, T.; Li, H. An Improved Adaptive Median Filtering Algorithm for Radar Image Co-Channel Interference Suppression. Sensors 2022, 22, 7573. https://doi.org/10.3390/s22197573
Li N, Liu T, Li H. An Improved Adaptive Median Filtering Algorithm for Radar Image Co-Channel Interference Suppression. Sensors. 2022; 22(19):7573. https://doi.org/10.3390/s22197573
Chicago/Turabian StyleLi, Nuozhou, Tong Liu, and Hangqi Li. 2022. "An Improved Adaptive Median Filtering Algorithm for Radar Image Co-Channel Interference Suppression" Sensors 22, no. 19: 7573. https://doi.org/10.3390/s22197573