
Novel Method for Estimating Propulsive Force Generated by Swimmers’ Hands Using Inertial Measurement Units and Pressure Sensors
 , , , ,
, , , ,
Abstract
:1. Introduction
2. Materials and Methods
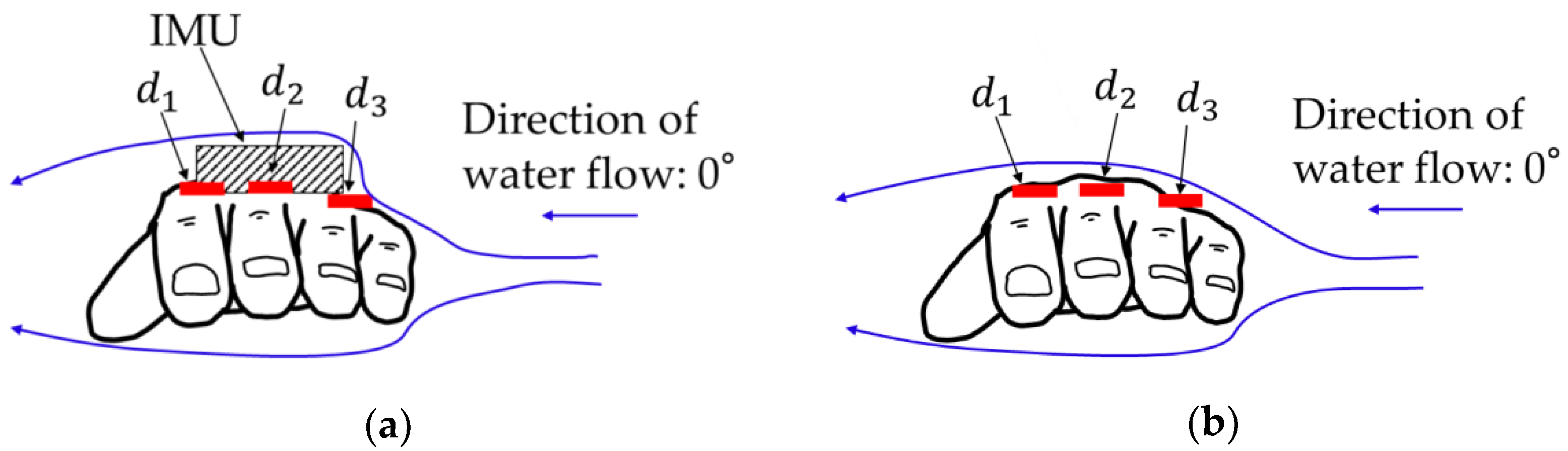
2.1. Experiment 1: Effect of Hand-Mounted IMU on Pressure around Hand Model
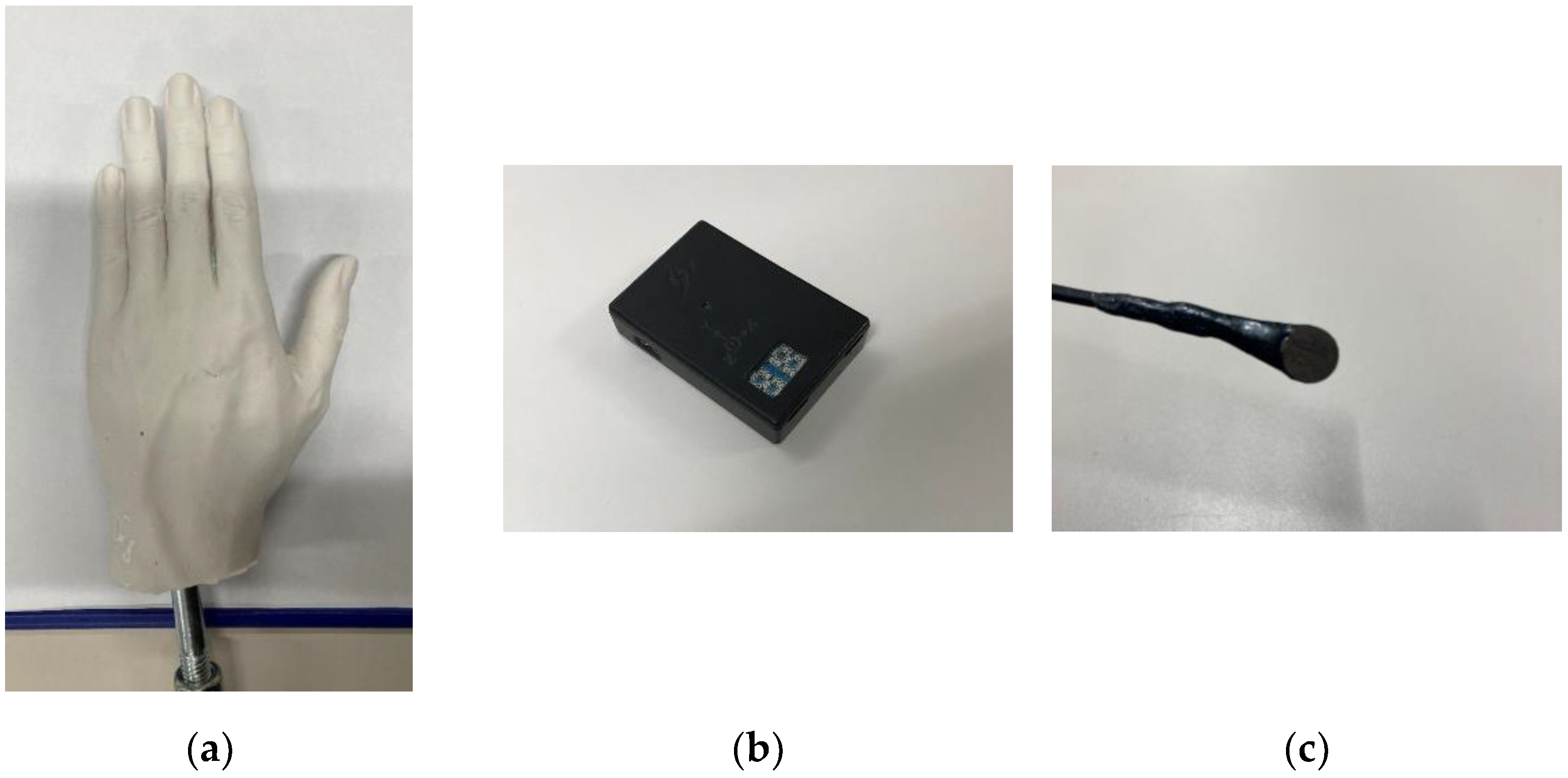
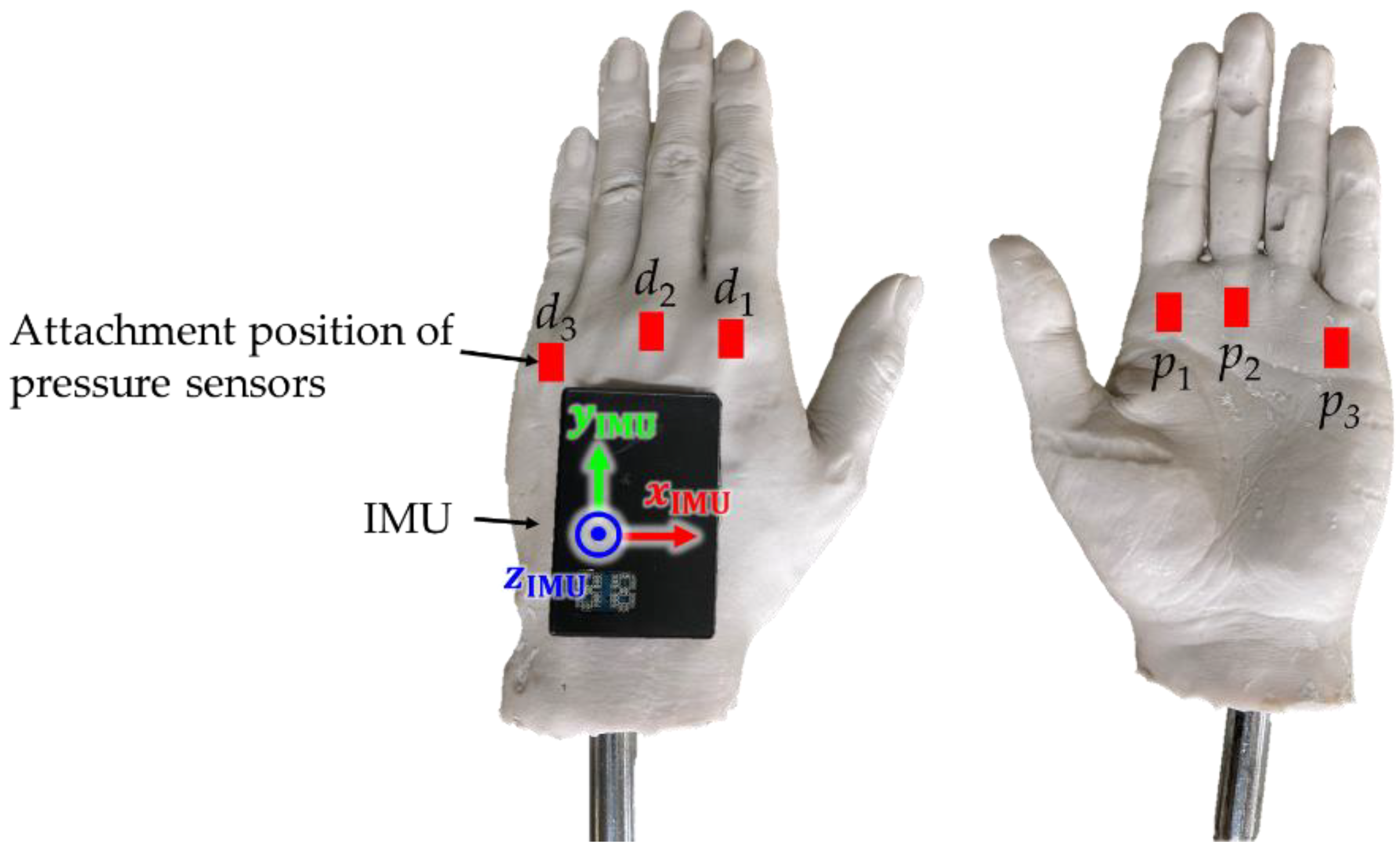
2.1.1. Experimental Design
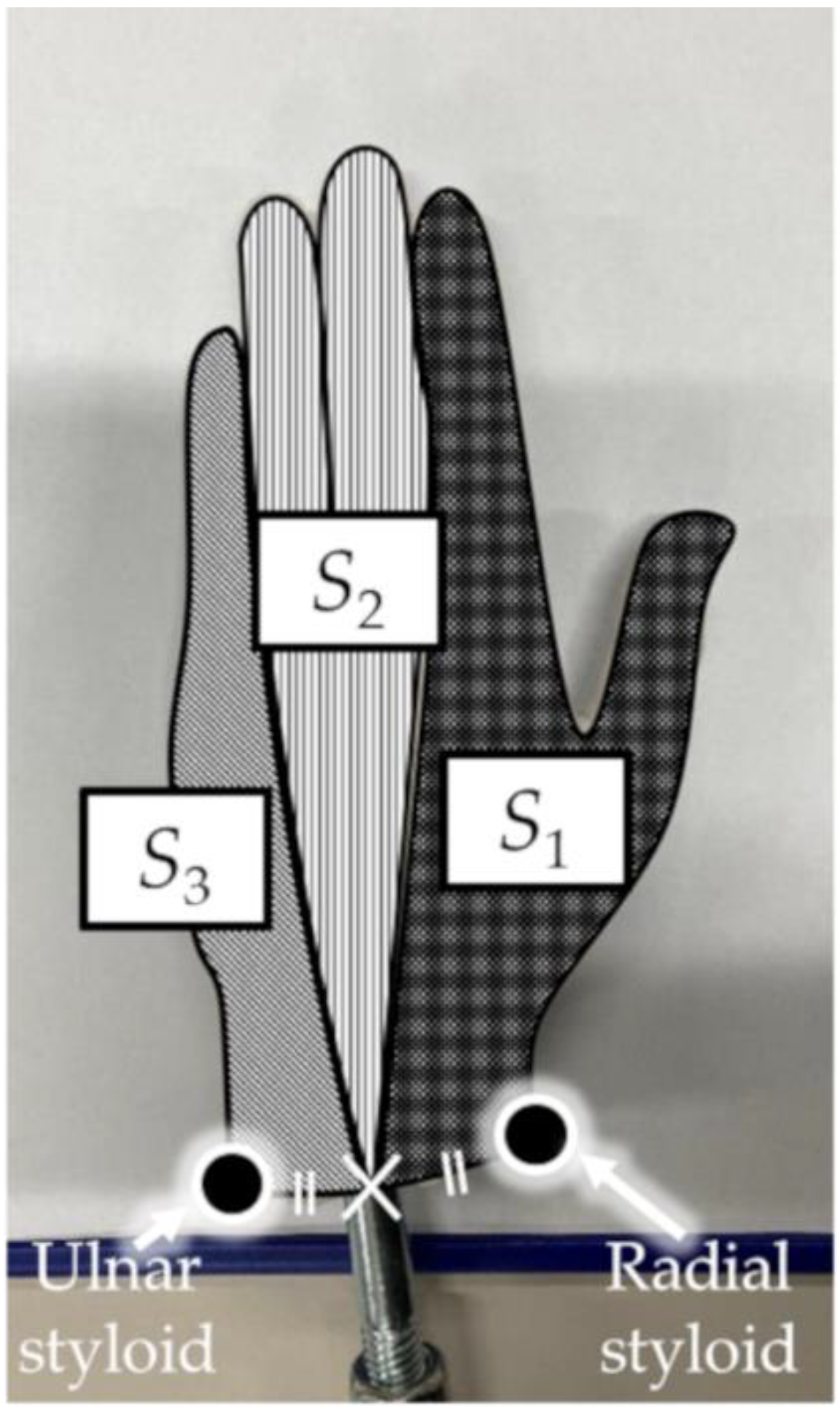
2.1.2. Data Processing and Statistical Analysis
2.2. Experiment 2: Propulsive Force Estimation
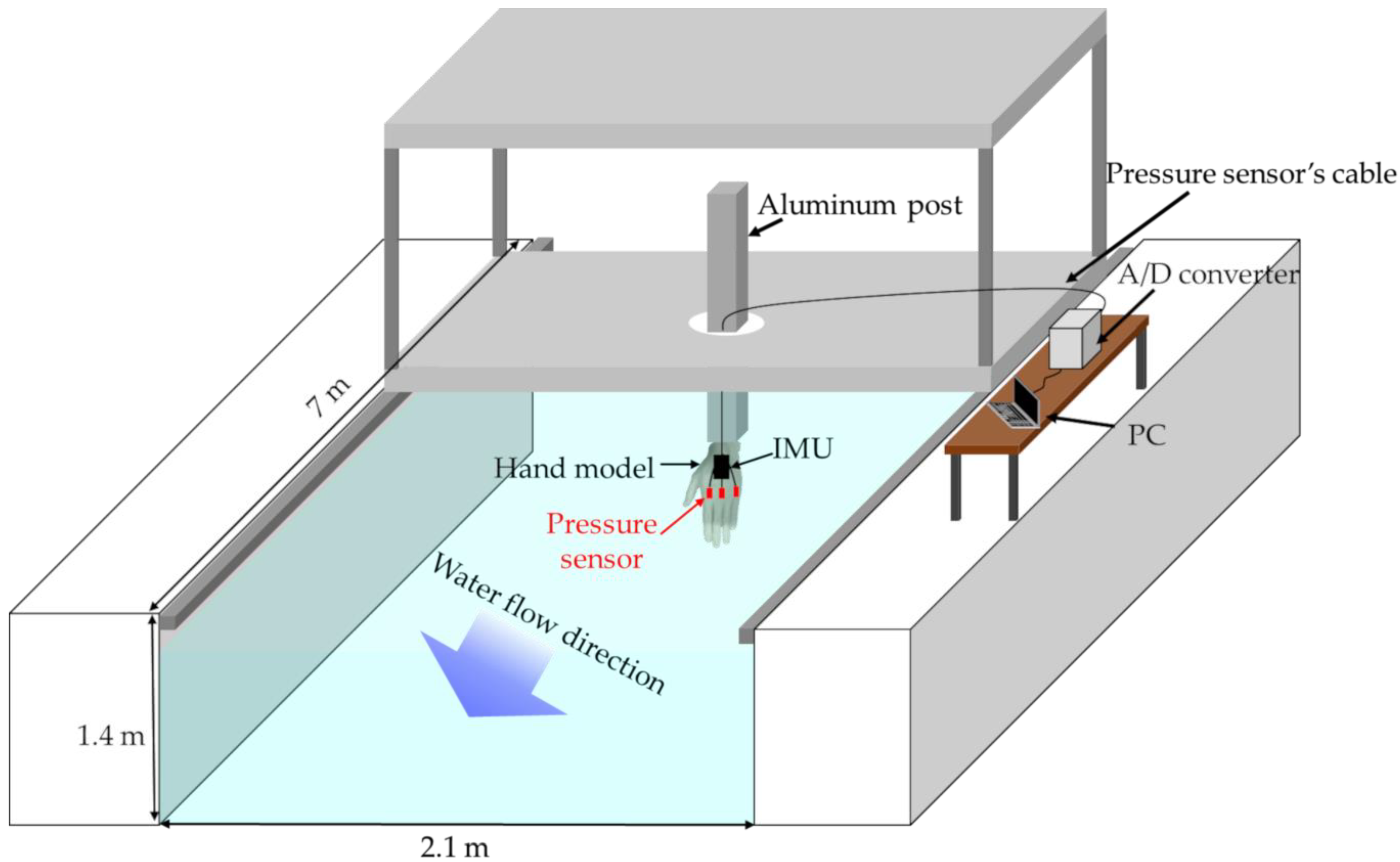
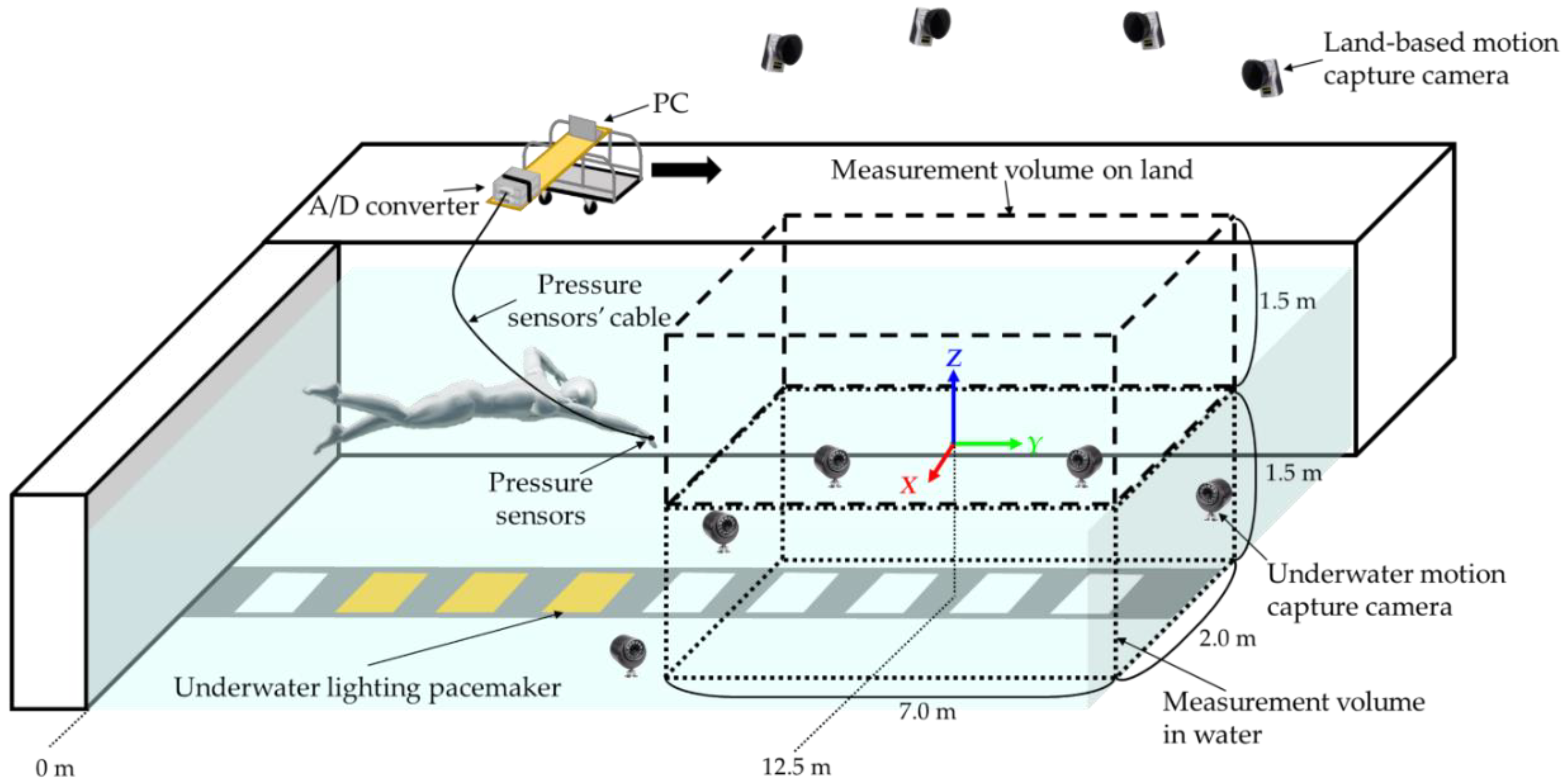
2.2.1. Experimental Design
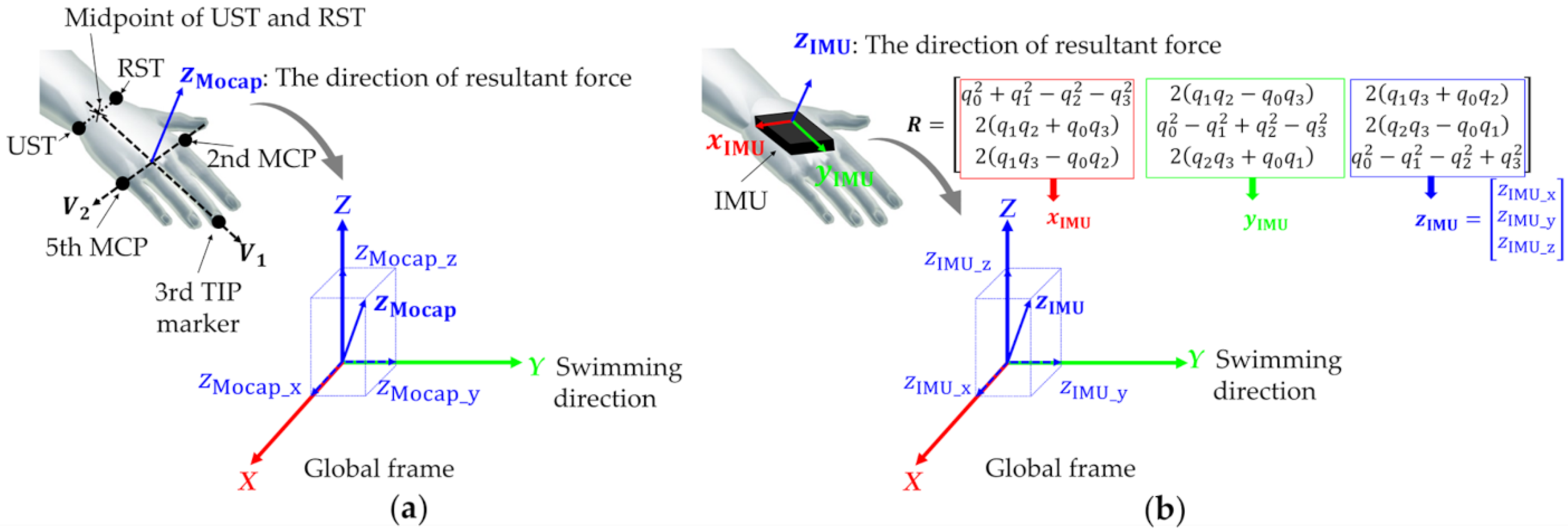
2.2.2. Data Processing
2.2.3. Statistical Analysis
3. Results
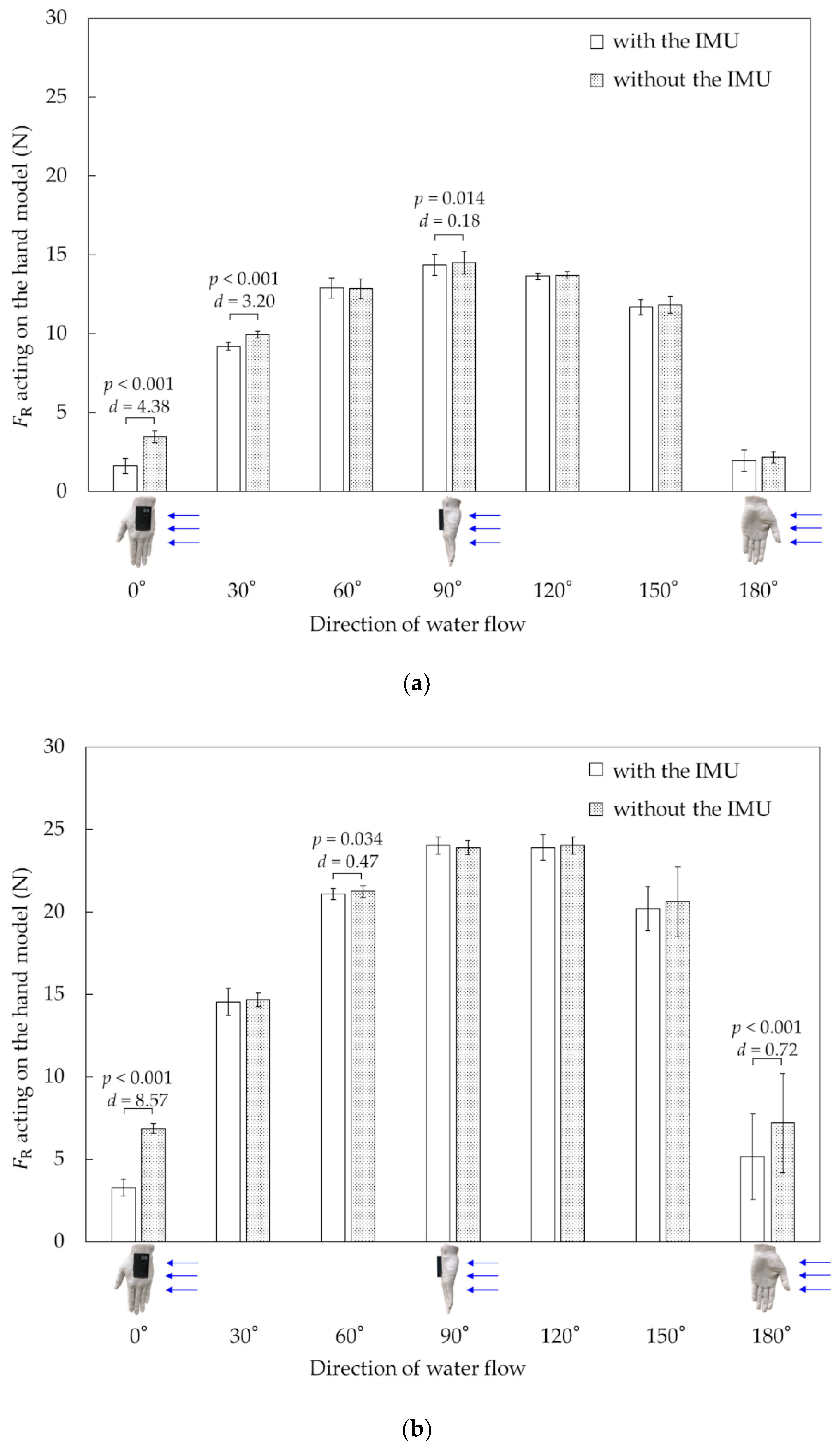
3.1. Effect of Mounted IMU on Hand Model
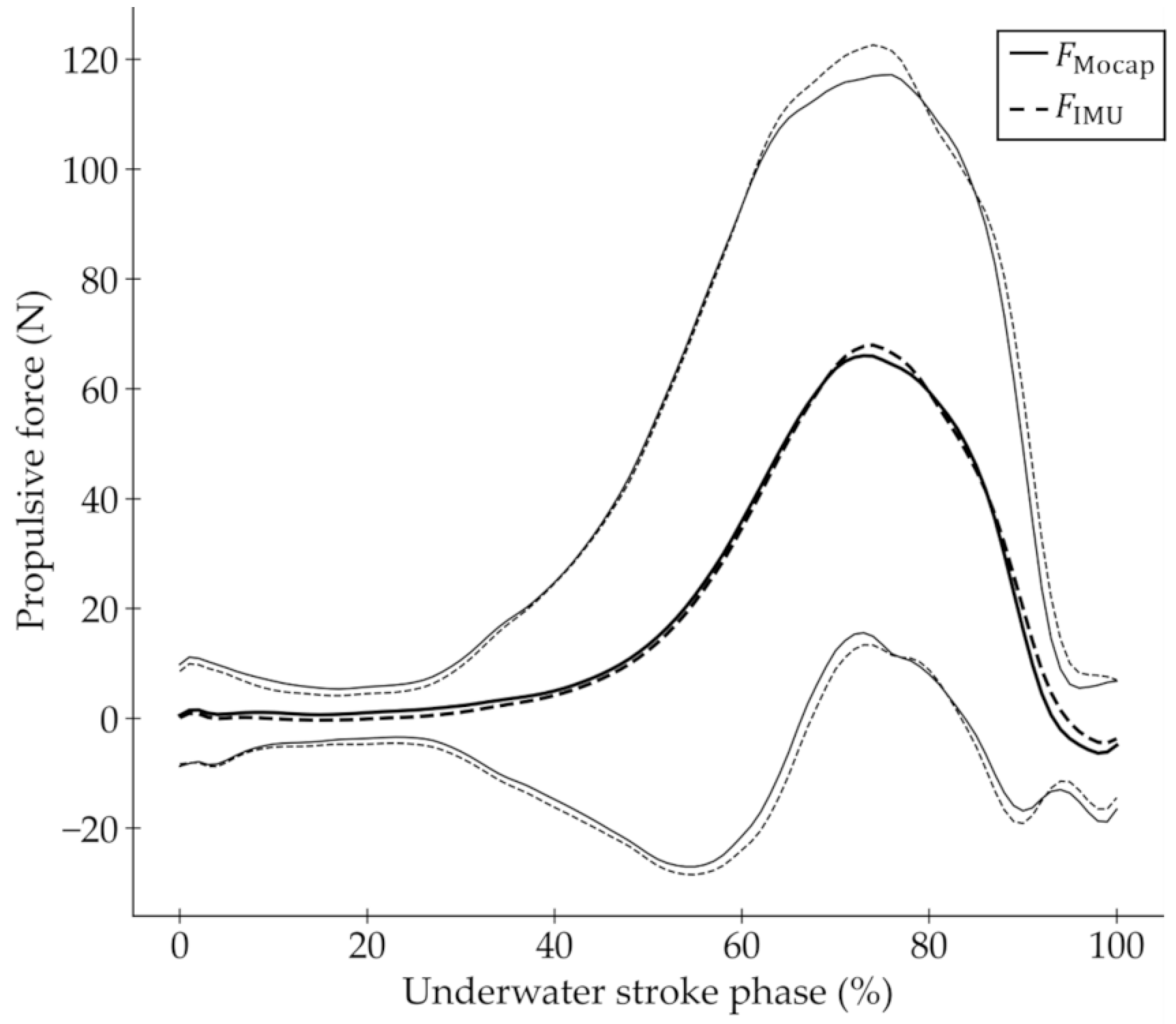
3.2. Comparison of Two Propulsive Force Estimation Methods
4. Discussion
4.1. Effect of Hand-Mounted IMU on Acting on Hand
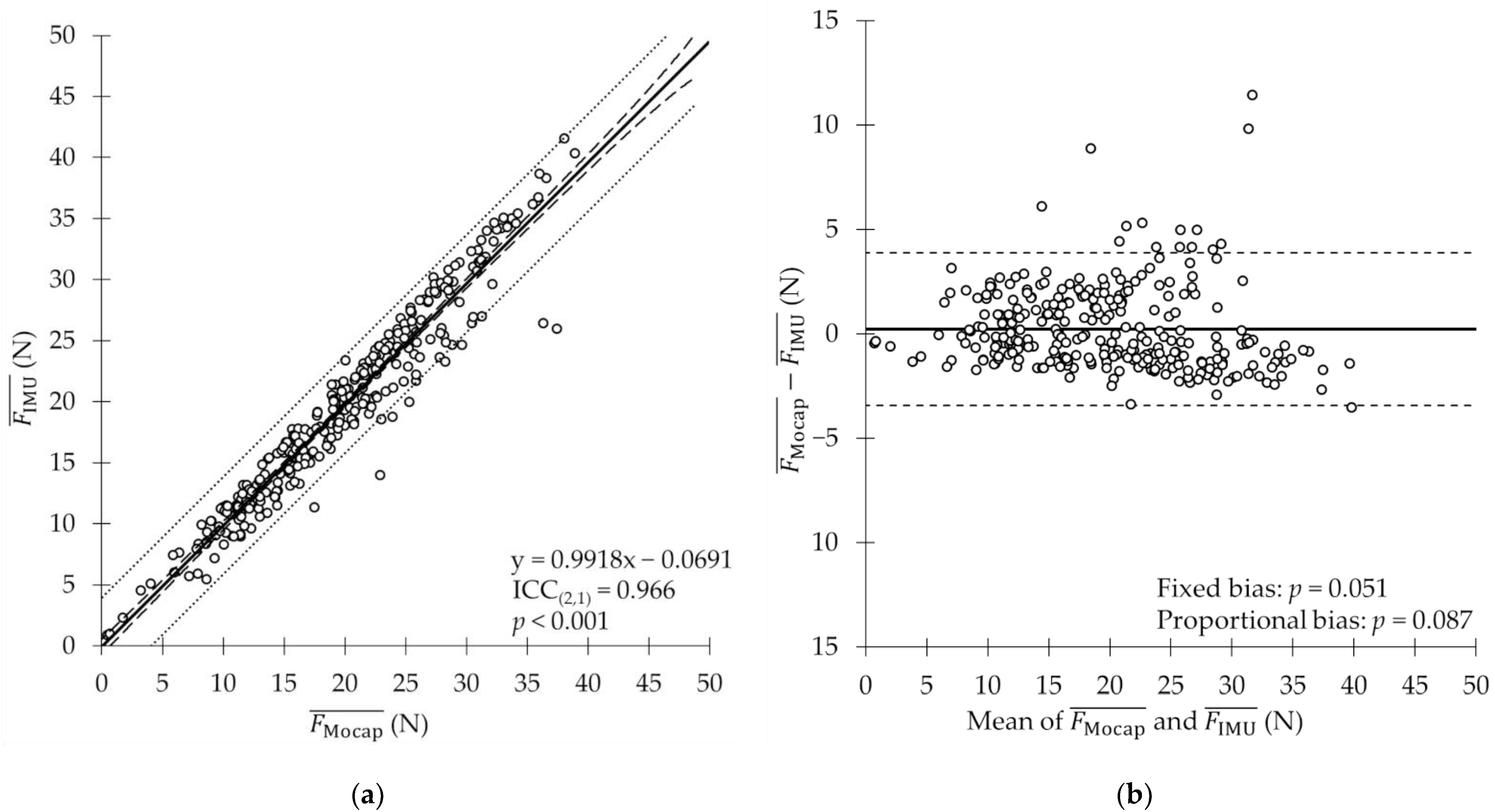
4.2. Agreement between Propulsive Force Estimation Using IMU and Underwater Motion-Capture System
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Schleihauf, R.E. A hydrodynamic analysis of swimming propulsion. In Swimming III. Proceedings of the Third International Symposium of Biomechanics in Swimming, University of Alberta, Edmonton, Canada; University Park Press: Baltimore, MA, USA, 1979; pp. 70–109. [Google Scholar]
- Schleihauf, R.; Gray, L.; DeRose, J. Three-Dimensional Analysis of Hand Prpoulsion in the Sprint Front Crawl Stroke; International Series on Sport Sciences, 14; Human Kinetics: Champaign, IL, USA, 1983; ISBN 0-931250-50-1. [Google Scholar]
- Maglischo, C.W.; Maglischo, E.W.; Higgins, J.; Hinrichs, R.; Luedtke, D.; Schleihauf, R.E.; Thayer, A. A biomechanical analysis of the 1984 U.S. Olympic freestyle distance swimmers. In Proceedings of the Swimming Science V; Human Kinetics Books: Champaign, IL, USA, 1988; pp. 351–360. [Google Scholar]
- Gourgoulis, V.; Aggeloussis, N.; Vezos, N.; Kasimatis, P.; Antoniou, P.; Mavromatis, G. Estimation of hand forces and propelling efficiency during front crawl swimming with hand paddles. J. Biomech. 2008, 41, 208–215. [Google Scholar] [CrossRef] [PubMed]
- Alley, L.E. An Analysis of Water Resistance and Propulsion in Swimming the Crawl Stroke. Res. Q. Am. Assoc. Heal. Phys. Educ. Recreat. 1952, 23, 253–270. [Google Scholar] [CrossRef]
- Counsilman, J.E. Forces in swimming two types of crawl stroke. Res. Q. Am. Assoc. Heal. Phys. Educ. Recreat. 1955, 26, 127–139. [Google Scholar] [CrossRef]
- Magel, J.R. Propelling force measured during tethered swimming in the four competitive swimming styles. Res. Q. Am. Assoc. Heal. Phys. Educ. Recreat. 1970, 41, 68–74. [Google Scholar] [CrossRef]
- Hollander, A.P.; De Groot, G.; Van Ingen Schenau, G.J.; Toussaint, H.M.; De Best, H.; Peeters, W.; Meulemans, A.; Schreurs, A.W. Measurement of active drag during crawl arm stroke swimming. J. Sports Sci. 1986, 4, 21–30. [Google Scholar] [CrossRef] [PubMed]
- Toussaint, H.M.; de Groot, G.; Savelberg, H.H.C.M.; Vervoorn, K.; Hollander, A.P.; van Ingen Schenau, G.J. Active drag related to velocity in male and female swimmers. J. Biomech. 1988, 21, 435–438. [Google Scholar] [CrossRef]
- Ungerechts, B.E.; Persyn, U.; Colman, V. Application of Vortex Flow Formation to Self-Propulsion in Water; University of Jyväskylä: Jyväskylä, Finland, 1999; ISBN 951-39-0607-8. [Google Scholar]
- Arellano, R.; Susana, P.; Arantxa, G. Underwater undulatory swimming: Kinematic characteristics, vortex generation and application during the start, turn and swimming strokes. In Proceedings of the XXth International Symposium on Biomechanics in Sports, Cáceres, Spain, 1–5 July 2002; Gianikellis, I.K.E., Ed.; University of Extremadura: Badajoz, Spain; Universidad de Granada: Granada, Spain, 2002; pp. 29–41. [Google Scholar]
- Toussaint, H.M.; Van Den Berg, C.; Beek, W.J. “Pumped-up propulsion” during front crawl swimming. Med. Sci. Sports Exerc. 2002, 34, 314–319. [Google Scholar] [CrossRef]
- Matsuuchi, K.; Miwa, T.; Nomura, T.; Sakakibara, J.; Shintani, H.; Ungerechts, B.E. Unsteady flow field around a human hand and propulsive force in swimming. J. Biomech. 2009, 42, 42–47. [Google Scholar] [CrossRef]
- Takagi, H.; Nakashima, M.; Ozaki, T.; Matsuuchi, K. Unsteady hydrodynamic forces acting on a robotic arm and its flow field: Application to the crawl stroke. J. Biomech. 2014, 47, 1401–1408. [Google Scholar] [CrossRef]
- Takagi, H.; Wilson, B. Calculating Hydrodynamic Force by Using Pressure Differences in Swimming; University of Jyväskylä: Jyväskylä, Finland, 1999; ISBN 951-39-0607-8. [Google Scholar]
- Ceccon, S.; Ceseracciu, E.; Sawacha, Z.; Gatta, G.; Cortesi, M.; Cobelli, C.; Fantozzi, S. Motion analysis of front crawl swimming applying CAST technique by means of automatic tracking. J. Sports Sci. 2013, 31, 276–287. [Google Scholar] [CrossRef]
- Monnet, T.; Samson, M.; Bernard, A.; David, L.; Lacouture, P. Measurement of three-dimensional hand kinematics during swimming with a motion capture system: A feasibility study. Sports Eng. 2014, 17, 171–181. [Google Scholar] [CrossRef]
- Tsunokawa, T.; Tsuno, T.; Mankyu, H.; Takagi, H.; Ogita, F. The effect of paddles on pressure and force generation at the hand during front crawl. Hum. Mov. Sci. 2018, 57, 409–416. [Google Scholar] [CrossRef] [PubMed]
- Washino, S.; Mayfield, D.L.; Lichtwark, G.A.; Mankyu, H.; Yoshitake, Y. Swimming performance is reduced by reflective markers intended for the analysis of swimming kinematics. J. Biomech. 2019, 91, 109–113. [Google Scholar] [CrossRef] [PubMed]
- Lauder, M.A.; Dabnichki, P.; Bartlett, R.M. Improved accuracy and reliability of sweepback angle, pitch angle and hand velocity calculations in swimming. J. Biomech. 2001, 34, 31–39. [Google Scholar] [CrossRef]
- Ohgi, Y.; Yasumura, M.; Ichikawa, H.; Miyaji, C. Analysis of stroke technique using acceleration sensor IC in freestyle swimming. Eng. Sport 2000, 7, 503–511. [Google Scholar]
- Ohgi, Y.; Ichikawa, H.; Homma, M.; Miyaji, C. Stroke phase discrimination in breaststroke swimming using a tri-axial acceleration sensor device. Sports Eng. 2003, 6, 113–123. [Google Scholar] [CrossRef]
- Ichikawa, H.; Ohgi, Y.; Miyaji, C.; Nomura, T. Estimation of Arm Joint Angular Displacements in Front Crawl Swimming Using Accelerometer; Revista Portuguesa de Ciencias do Desporto; Faculdade de Desporto da Universidade do Porto: Porto, Portugal, 2006; Volume 6. [Google Scholar]
- Daukantas, S.; Marozas, V.; Lukosevicius, A. Inertial sensor for objective evaluation of swimmer performance. In Proceedings of the 2008 11th International Biennial Baltic Electronics Conference, Tallinn, Estonia, 6–8 October 2008; pp. 321–324. [Google Scholar] [CrossRef]
- Bächlin, M.; Förster, K.; Tröster, G. SwimMaster: A wearable assistant for swimmer. In Proceedings of the 11th International Conference on Ubiquitous Computing, Orlando, FL, USA, 30 September–3 October 2009; pp. 215–224. [Google Scholar] [CrossRef]
- Dadashi, F.; Crettenand, F.; Millet, G.P.; Aminian, K. Front-crawl instantaneous velocity estimation using a wearable inertial measurement unit. Sensors 2012, 12, 12927–12939. [Google Scholar] [CrossRef]
- Magalhaes, F.A.d.; Vannozzi, G.; Gatta, G.; Fantozzi, S. Wearable inertial sensors in swimming motion analysis: A systematic review. J. Sports Sci. 2015, 33, 732–745. [Google Scholar] [CrossRef]
- Mooney, R.; Corley, G.; Godfrey, A.; Quinlan, L.R.; ÓLaighin, G. Inertial sensor technology for elite swimming performance analysis: A systematic review. Sensors 2015, 16. [Google Scholar] [CrossRef] [Green Version]
- Lanotte, N.; Annino, G.; Bifaretti, S.; Gatta, G.; Romagnoli, C.; Salvucci, A.; Bonaiuto, V. A New Device for Propulsion Analysis in Swimming. Proceedings 2018, 2, 285. [Google Scholar] [CrossRef]
- Cortesi, M.; Giovanardi, A.; Gatta, G.; Mangia, A.L.; Bartolomei, S.; Fantozzi, S. Inertial sensors in swimming: Detection of stroke phases through 3D wrist trajectory. J. Sports Sci. Med. 2019, 18, 438–447. [Google Scholar] [PubMed]
- Winter, D.A. Biomechanics and Motor Control of Human Movement: Fourth Edition; John Wiley and Sons: Hoboken, NJ, USA, 2009; Volume 7, ISBN 9780470398180. [Google Scholar] [CrossRef]
- Cohen, J. Statistical Power Analysis for the Behavioral Sciences, 2nd ed.; Lawrence Erlbaum Associates: Hillsdale, NJ, USA, 1988; ISBN 9780805802832. [Google Scholar]
- Cohen, J. A power primer. Psychol. Bull. 1992, 112, 155–159. [Google Scholar] [CrossRef] [PubMed]
- Madgwick, S.O.H.; Harrison, A.J.L.; Vaidyanathan, R. Estimation of IMU and MARG orientation using a gradient descent algorithm. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–7. [Google Scholar] [CrossRef]
- Bachmann, E.R.; Yun, X.; Peterson, C.W. An investigation of the effects of magnetic variations on inertial/magnetic orientation sensors. In Proceedings of the IEEE International Conference on Robotics and Automation, 2004. Proceedings. ICRA ’04. 2004, New Orleans, LA, USA, 26 April–1 May 2004; Volume 2, pp. 1115–1122. [Google Scholar] [CrossRef]
- Camomilla, V.; Bergamini, E.; Fantozzi, S.; Vannozzi, G. Trends supporting the in-field use of wearable inertial sensors for sport performance evaluation: A systematic review. Sensors 2018, 18, 873. [Google Scholar] [CrossRef] [PubMed]
- Bland, J.M.; Altman, D.G. Statistical methods for assessing agreement between two methods of clinical measurement. Lancet 1986, 327, 307–310. [Google Scholar] [CrossRef]
- Portney, L.G.; Watkins, M.P. Foundations of Clinical Research: Applications to Practice, 3rd ed.; Pearson/Prentice Hall: Upper Saddle River, NJ, USA, 2015; Volume 892, ISBN 978-0803646575. [Google Scholar]
- Atkinson, G.; Nevill, A.M. Statistical methods for assessing measurement error (reliability) in variables relevant to sports medicine. Sports Med. 1998, 26, 217–238. [Google Scholar] [CrossRef]
- Bland, J.M.; Altman, D.G. Agreement Between Methods of Measurement with Multiple Observations Per Individual. J. Biopharm. Stat. 2007, 17, 571–582. [Google Scholar] [CrossRef] [Green Version]
- Ferrari, A.; Cutti, A.G.; Cappello, A. A new formulation of the coefficient of multiple correlation to assess the similarity of waveforms measured synchronously by different motion analysis protocols. Gait Posture 2010, 31, 540–542. [Google Scholar] [CrossRef]
- Ferrari, A.; Cutti, A.G.; Garofalo, P.; Raggi, M.; Heijboer, M.; Cappello, A.; Davalli, A. First in vivo assessment of “outwalk”: A novel protocol for clinical gait analysis based on inertial and magnetic sensors. Med. Biol. Eng. Comput. 2010, 48, 1. [Google Scholar] [CrossRef]
- Gonjo, T.; Fernandes, R.J.; Vilas-Boas, J.P.; Sanders, R. Upper body kinematic differences between maximum front crawl and backstroke swimming. J. Biomech. 2020, 98, 109452. [Google Scholar] [CrossRef]
- Maglischo, E.W. Swimming Fastest; Human Kinetics: Champaign, IL, USA, 2003; ISBN 0736031804. [Google Scholar]
- Forner-Cordero, A.; Mateu-Arce, M.; Forner-Cordero, I.; Alcántara, E.; Moreno, J.C.; Pons, J.L. Study of the motion artefacts of skin-mounted inertial sensors under different attachment conditions. Physiol. Meas. 2008, 29. [Google Scholar] [CrossRef]
- Cereatti, A.; Bonci, T.; Akbarshahi, M.; Aminian, K.; Barré, A.; Begon, M.; Benoit, D.L.; Charbonnier, C.; Dal Maso, F.; Fantozzi, S.; et al. Standardization proposal of soft tissue artefact description for data sharing in human motion measurements. J. Biomech. 2017, 62, 5–13. [Google Scholar] [CrossRef] [PubMed]
- Cappozzo, A. Three-dimensional analysis of human walking: Experimental methods and associated artifacts. Hum. Mov. Sci. 1991, 10, 589–602. [Google Scholar] [CrossRef]
- Guignard, B.; Rouard, A.; Chollet, D.; Seifert, L. Behavioral dynamics in swimming: The appropriate use of inertial measurement units. Front. Psychol. 2017, 8, 383. [Google Scholar] [CrossRef] [PubMed] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pressure Sensor’s Position | Pressure without the IMU (kPa) | Pressure with the IMU (kPa) | t Value (p Value) | Cohen’s d |
|---|---|---|---|---|
| p1 | −0.63 ± 0.02 | −0.70 ± 0.02 | −7.30 (<0.001) | 2.94 |
| p2 | −0.73 ± 0.02 | −0.77 ± 0.01 | −8.59 (<0.001) | 2.04 |
| p3 | −0.69 ± 0.04 | −0.74 ± 0.03 | −3.97 (<0.001) | 1.31 |
| d1 | −0.85 ± 0.03 | −0.89 ± 0.02 | −11.21 (<0.001) | 1.45 |
| d2 | −0.99 ± 0.02 | −0.95 ± 0.04 | 6.26 (<0.001) | 1.45 |
| d3 | −0.98 ± 0.04 | −0.63 ± 0.03 | 22.38 (<0.001) | 9.03 |
| Pressure Sensor’s Position | Pressure without the IMU (kPa) | Pressure with the IMU (kPa) | t Value (p Value) | Cohen’s d |
|---|---|---|---|---|
| p1 | −0.65 ± 0.05 | −0.75 ± 0.04 | −18.61 (<0.001) | 2.14 |
| p2 | −0.90 ± 0.06 | −1.01 ± 0.08 | −7.93 (<0.001) | 1.51 |
| p3 | −0.70 ± 0.08 | −0.79 ± 0.08 | −23.67 (<0.001) | 1.15 |
| d1 | −1.09 ± 0.09 | −1.12 ± 0.09 | −6.00 (<0.001) | 0.37 |
| d2 | −1.25 ± 0.09 | −1.14 ± 0.10 | 13.96 (<0.001) | 1.19 |
| d3 | −1.48 ± 0.07 | −0.92 ± 0.06 | 35.24 (<0.001) | 8.81 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kadi, T.; Wada, T.; Narita, K.; Tsunokawa, T.; Mankyu, H.; Tamaki, H.; Ogita, F. Novel Method for Estimating Propulsive Force Generated by Swimmers’ Hands Using Inertial Measurement Units and Pressure Sensors. Sensors 2022, 22, 6695. https://doi.org/10.3390/s22176695
Kadi T, Wada T, Narita K, Tsunokawa T, Mankyu H, Tamaki H, Ogita F. Novel Method for Estimating Propulsive Force Generated by Swimmers’ Hands Using Inertial Measurement Units and Pressure Sensors. Sensors. 2022; 22(17):6695. https://doi.org/10.3390/s22176695
Chicago/Turabian StyleKadi, Tomoya, Tomohito Wada, Kenzo Narita, Takaaki Tsunokawa, Hirotoshi Mankyu, Hiroyuki Tamaki, and Futoshi Ogita. 2022. "Novel Method for Estimating Propulsive Force Generated by Swimmers’ Hands Using Inertial Measurement Units and Pressure Sensors" Sensors 22, no. 17: 6695. https://doi.org/10.3390/s22176695