

HW/SW Platform for Measurement and Evaluation of Ultrasonic Underwater Communications
 , , , and
, , , and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- High operating frequencies in the ultrasonic band, 32–128 kHz.
- Very broad bandwidth of 96 kHz, two octaves.
- A robust and rather automated system that allows registering long signal records.
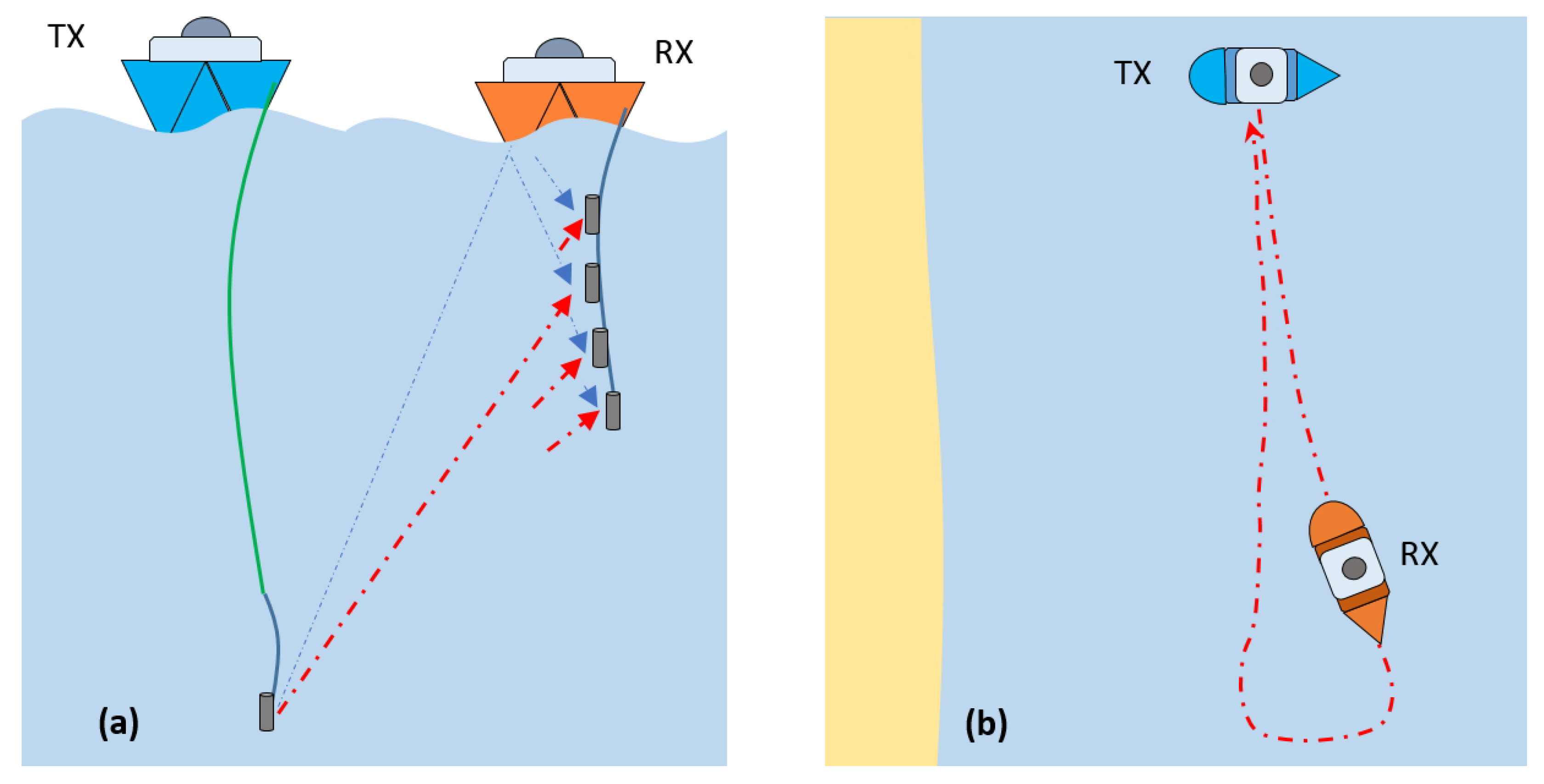
2. UAC Scenarios
3. HW of the Measurement/Emulation System
4. SW of the Measurement/Emulation System
4.1. Transmitter Application
4.2. Receiver Application
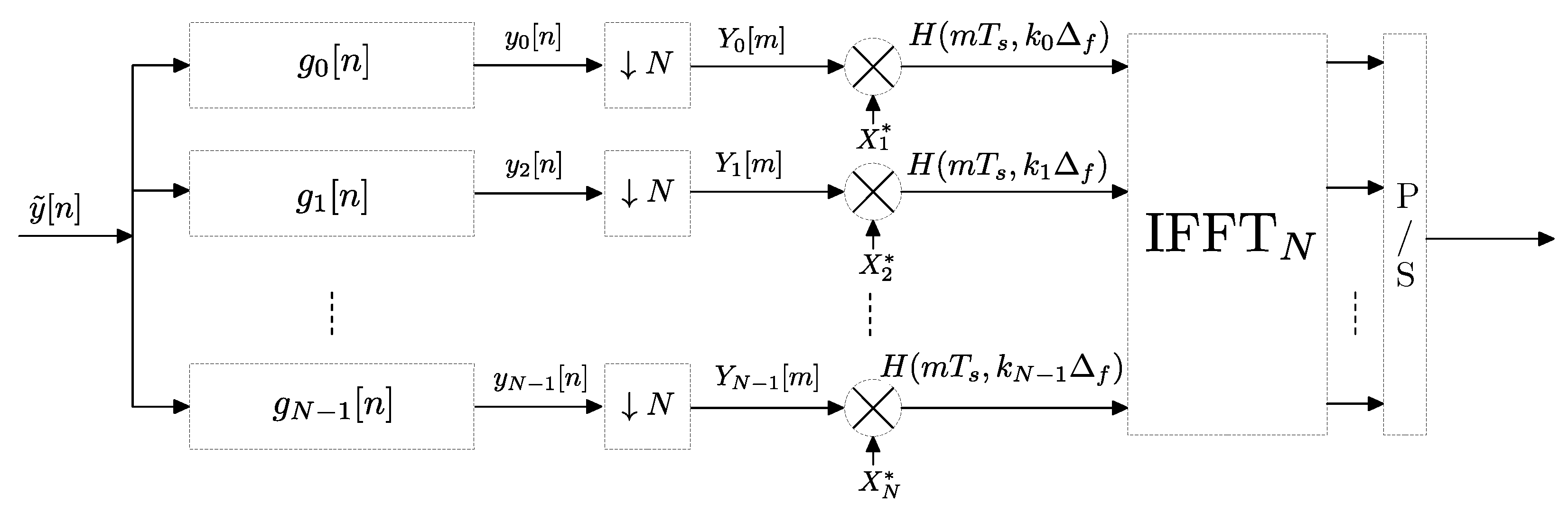
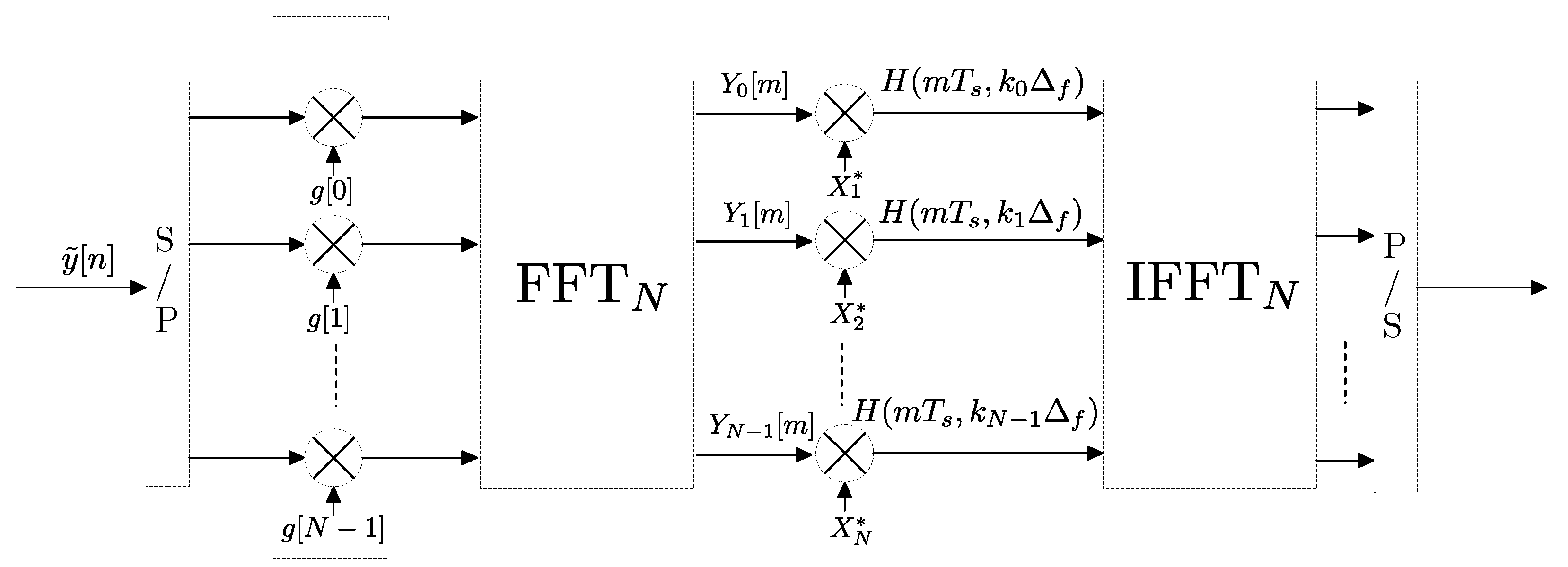
5. Description of the Signal Processing
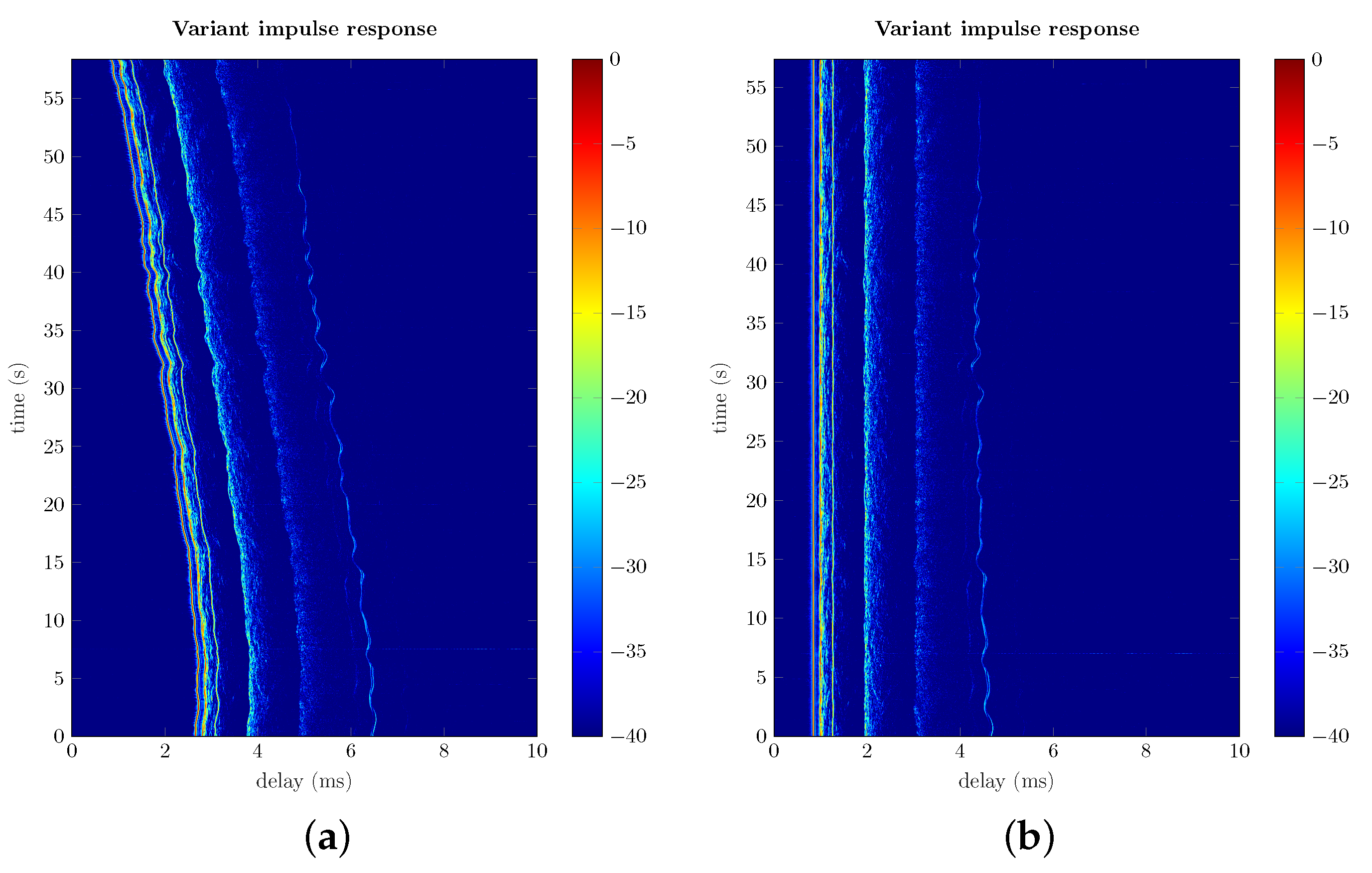
5.1. Procedure for Channel Estimation Based on Multicarrier Signals
5.2. Doppler Effect Reduction by Resampling
5.3. Enhancing the Measurement System Versatility
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Stojanovic, M.; Preisig, J. Underwater acoustic communication channels: Propagation models and statistical characterization. IEEE Commun. Mag. 2009, 47, 84–89. [Google Scholar] [CrossRef]
- van Walree, P.A.; Jenserud, T.; Song, H. Characterization of overspread acoustic communication channels. In Proceedings of the 10th European Conference on Underwater Acoustics, Istanbul, Turkey, 5–9 July 2010; pp. 952–958. [Google Scholar]
- van Walree, P.A. Propagation and Scattering Effects in Underwater Acoustic Communication Channels. IEEE J. Ocean. Eng. 2013, 38, 614–631. [Google Scholar] [CrossRef]
- Stojanovic, M. Underwater Acoustic Communications: Design Considerations on the Physical Layer. In Proceedings of the 2008 Fifth Annual Conference on Wireless on Demand Network Systems and Services, Garmisch-Partenkirchen, Germany, 23–25 January 2008; pp. 1–10. [Google Scholar] [CrossRef]
- Singer, A.C.; Nelson, J.K.; Kozat, S.S. Signal processing for underwater acoustic communications. IEEE Commun. Mag. 2009, 47, 90–96. [Google Scholar] [CrossRef]
- Li, W.; Preisig, J.C. Estimation of Rapidly Time-Varying Sparse Channels. IEEE J. Ocean. Eng. 2007, 32, 927–939. [Google Scholar] [CrossRef]
- van Walree, P.A.; Otnes, R. Ultrawideband Underwater Acoustic Communication Channels. IEEE J. Ocean. Eng. 2013, 38, 678–688. [Google Scholar] [CrossRef]
- Li, J.; Chen, F.; Liu, S.; Yu, H.; Ji, F. Estimation of Overspread Underwater Acoustic Channel Based on Low-Rank Matrix Recovery. Sensors 2019, 19, 4976. [Google Scholar] [CrossRef]
- López-Fernández, J.; Fernández-Plazaola, U.; Paris, J.F.; Díez, L.; Martos-Naya, E. Wideband Ultrasonic Acoustic Underwater Channels: Measurements and Characterization. IEEE Trans. Veh. Technol. 2020, 69, 4019–4032. [Google Scholar] [CrossRef]
- Al-Dharrab, S.; Uysal, M.; Duman, T.M. Cooperative underwater acoustic communications [Accepted From Open Call]. IEEE Commun. Mag. 2013, 51, 146–153. [Google Scholar] [CrossRef]
- Chitre, M.; Potter, J.; Heng, O. Underwater acoustic channel characterisation for medium-range shallow water communications. In Proceedings of the Oceans ’04 MTS/IEEE Techno-Ocean ’04 (IEEE Cat. No. 04CH37600), Kobe, Japan, 9–12 November 2004; Volume 1, pp. 40–45. [Google Scholar] [CrossRef]
- Chitre, M. A high-frequency warm shallow water acoustic communications channel model and measurements. J. Acoust. Soc. Am. 2007, 122, 2580–2586. [Google Scholar] [CrossRef]
- Sha’ameri, A.Z.; Al-Aboosi, Y.Y.; Khamis, N.H.H. Underwater Acoustic Noise Characteristics of Shallow Water in Tropical Seas. In Proceedings of the 2014 International Conference on Computer and Communication Engineering, Kuala Lumpur, Malaysia, 23–25 September 2014; pp. 80–83. [Google Scholar] [CrossRef]
- Quazi, A.; Konrad, W. Underwater acoustic communications. IEEE Commun. Mag. 1982, 20, 24–30. [Google Scholar] [CrossRef]
- Aval, Y.M.; Stojanovic, M. Differentially Coherent Multichannel Detection of Acoustic OFDM Signals. IEEE J. Ocean. Eng. 2015, 40, 251–268. [Google Scholar] [CrossRef]
- Kilfoyle, D.; Preisig, J.; Baggeroer, A. Spatial modulation experiments in the underwater acoustic channel. IEEE J. Ocean. Eng. 2005, 30, 406–415. [Google Scholar] [CrossRef]
- Li, B.; Huang, J.; Zhou, S.; Ball, K.; Stojanovic, M.; Freitag, L.; Willett, P. MIMO-OFDM for High-Rate Underwater Acoustic Communications. IEEE J. Ocean. Eng. 2009, 34, 634–644. [Google Scholar] [CrossRef]
- Radosevic, A.; Proakis, J.; Stojanovic, M. Statistical characterization and capacity of shallow water acoustic channels. In Proceedings of the OCEANS 2009-EUROPE, Bremen, Germany, 11–14 May 2009; pp. 1–8. [Google Scholar] [CrossRef]
- Li, B.; Zhou, S.; Stojanovic, M.; Freitag, L.; Willett, P. Multicarrier Communication Over Underwater Acoustic Channels With Nonuniform Doppler Shifts. IEEE J. Ocean. Eng. 2008, 33, 198–209. [Google Scholar] [CrossRef]
- Aval, Y.M.; Wilson, S.K.; Stojanovic, M. On the Average Achievable Rate of QPSK and DQPSK OFDM Over Rapidly Fading Channels. IEEE Access 2018, 6, 23659–23667. [Google Scholar] [CrossRef]
- Ribas, J.; Sura, D.; Stojanovic, M. Underwater wireless video transmission for supervisory control and inspection using acoustic OFDM. In Proceedings of the OCEANS 2010 MTS/IEEE SEATTLE, Seattle, WA, USA, 20–23 September 2010; pp. 1–9. [Google Scholar] [CrossRef]
- Hegazy, R.; Kadifa, J.; Milstein, L.; Cosman, P. Subcarrier Mapping for Underwater Video Transmission Over OFDM. IEEE J. Ocean. Eng. 2021, 46, 1408–1423. [Google Scholar] [CrossRef]
- Ochi, H.; Watanabe, Y.; Shimura, T.; Hattori, T. Experimental Results of Short Range Wideband Acoustic Communication Using QPSK and 8PSK. In Proceedings of the OCEANS 2008—MTS/IEEE Kobe Techno-Ocean, Kobe, Japan, 8–11 April 2008; pp. 1–5. [Google Scholar] [CrossRef]
- Diamant, R.; Tan, H.P.; Lampe, L. LOS and NLOS Classification for Underwater Acoustic Localization. IEEE Trans. Mob. Comput. 2014, 13, 311–323. [Google Scholar] [CrossRef]
- Headrick, R.; Freitag, L. Growth of underwater communication technology in the U.S. Navy. IEEE Commun. Mag. 2009, 47, 80–82. [Google Scholar] [CrossRef]
- Cañete, F.J.; López-Fernández, J.; García-Corrales, C.; Sánchez, A.; Robles, E.; Rodrigo, F.J.; Paris, J.F. Measurement and Modeling of Narrowband Channels for Ultrasonic Underwater Communications. Sensors 2016, 16, 256. [Google Scholar] [CrossRef]
- Cobacho-Ruiz, P.; Cañete, F.J.; Martos-Naya, E.; Fernández-Plazaola, U. OFDM System Design for Measured Ultrasonic Underwater Channels. Sensors 2022, 22, 5703. [Google Scholar] [CrossRef]
- IOtech. DaqX Software. Available online: http://support.elmark.com.pl/iotech/desktop/DaqLab_Users_Manual.pdf (accessed on 23 April 2022).
- Hans-Jurgen Zepernick, A.F. Pseudo Random Signal Processing: Theory and Application; Wiley-Blackwell: Chichester, UK, 2013. [Google Scholar]
- Crochiere, R.; Rabiner, L. Multirate Digital Signal Processing; Prentice-Hall Signal Processing Series: Advanced monographs; Prentice-Hall: Hoboken, NJ, USA, 1983. [Google Scholar]
- Daoud, S.; Ghrayeb, A. Using Resampling to Combat Doppler Scaling in UWA Channels With Single-Carrier Modulation and Frequency-Domain Equalization. IEEE Trans. Veh. Technol. 2016, 65, 1261–1270. [Google Scholar] [CrossRef]
- Liu, X.; Qiao, G.; Ma, L.; Zheng, N.; Zhao, Y. Non-Uniform Doppler Compensation Method for Staggered Multitone Filter Bank Multicarrier in the Underwater Acoustic Channel. In Proceedings of the 2021 OES China Ocean Acoustics (COA), Harbin, China, 14–17 July 2021; pp. 586–590. [Google Scholar] [CrossRef]
- Yang, S.; Deane, G.B.; Preisig, J.C.; Sevüktekin, N.C.; Choi, J.W.; Singer, A.C. On the Reusability of Postexperimental Field Data for Underwater Acoustic Communications R&D. IEEE J. Ocean. Eng. 2019, 44, 912–931. [Google Scholar] [CrossRef]
- van Walree, P.A.; Socheleau, F.X.; Otnes, R.; Jenserud, T. The Watermark Benchmark for Underwater Acoustic Modulation Schemes. IEEE J. Ocean. Eng. 2017, 42, 1007–1018. [Google Scholar] [CrossRef] [Green Version]
- van Walree, P.A.; Otnes, R.; Jenserud, T. The Watermark Acoustic Modem Benchmark. 2016. Available online: http://www.ffi.no/watermark (accessed on 10 August 2022).














Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fernández-Plazaola, U.; López-Fernández, J.; Martos-Naya, E.; Paris, J.F.; Cañete, F.J. HW/SW Platform for Measurement and Evaluation of Ultrasonic Underwater Communications. Sensors 2022, 22, 6514. https://doi.org/10.3390/s22176514
Fernández-Plazaola U, López-Fernández J, Martos-Naya E, Paris JF, Cañete FJ. HW/SW Platform for Measurement and Evaluation of Ultrasonic Underwater Communications. Sensors. 2022; 22(17):6514. https://doi.org/10.3390/s22176514
Chicago/Turabian StyleFernández-Plazaola, Unai, Jesús López-Fernández, Eduardo Martos-Naya, José F. Paris, and Francisco Javier Cañete. 2022. "HW/SW Platform for Measurement and Evaluation of Ultrasonic Underwater Communications" Sensors 22, no. 17: 6514. https://doi.org/10.3390/s22176514