1. Introduction
At present, using sound waves is the only method for transmitting data over long distances in seawater. Underwater acoustic communication has become an indispensable part of data transmission technology for exploring, developing, and protecting the ocean. The complexity of UAC systems is mainly manifested in the time-varying and space-varying channels. The signal-to-noise ratio (SNR) as a measurement parameter of system performance design is also an important indicator for evaluating the quality of underwater acoustic communication. The spatiotemporal variation range of the SNR can be used to describe the spatiotemporal fluctuation characteristics of underwater acoustic communication signals.
Due to the complexity and time variation of the marine environment, the SNR of communication signals varies widely in time and space. Therefore, the degeneration in the UAC system performance would be caused by two reasons: the difficulties in optimizing the synchronization signal detection threshold and determining the location of the UAC system equipment. However, from the perspective of the sound field, it is possible to describe the spatiotemporal variation from the signal field and noise field, and then analyze the fluctuation characteristics of the underwater acoustic communication channel. Environmental factors, such as ocean currents, tides, and internal waves, with large spatial-temporal fluctuations have not been considered.
Since the 1950s, researchers have gradually paid attention to signal interference in shallow-water sound fields, and they mainly analyzed the spatial-temporal characteristics of sound fields based on ray acoustic theory and normal wave theory [
1,
2,
3]. Ray acoustics researchers focused on the Loe mirror effect in optics, which assumes that the interfering sound rays are approximately parallel, and they derived a partially analytical solution and discovered vertical distribution characteristics of the sound field [
4]. In the 1980s, in view of the normal wave theory and far-field assumption, scholars analyzed the interference sound field and put forward the conception of waveguide invariants. However, previous theoretical analyses of the interference phenomenon, which are based on restricted scenarios and simplified assumptions, were detrimental to the establishment of a universal analysis model. This study mainly focused on the influence of short-range shallow sea interference on signal fluctuations. Compared with the normal wave method, the ray acoustic method is superior given its clear concept and simple calculation; therefore, the ray acoustic method was adopted to analyze the spatial distribution of the sound field.
From the perspective of the sound field, the influencing factors of the spatial variation range of the SNR are not only the spatial-temporal distribution characteristics of the signal field caused by the signal interference and interface fluctuations but also the spatial-temporal distribution characteristics of the system noise field. The operating performance of a UAC system is significantly affected by the noise of the system and the marine environment. The marine environmental noise was first measured in two studies [
5,
6]. After analyzing a large amount of measured data, it was found that marine environmental noise is mainly composed of wind-induced noise, ship noise, and biological noise; reference [
7] gives a marine environmental noise spectrum and notes that the low-frequency noise components mainly come from the machinery of ships, while high-frequency noise is mainly wind-induced wave noise. Due to the continuous development of signal acquisition technology and the increase in marine research investment, research on marine environmental noise has become a popular topic of discussion [
8,
9,
10,
11,
12,
13,
14,
15]. On the basis of different sound field propagation theories, researchers proposed various marine environmental noise models. The classic models include the C/S model, K/I fast-field model, and P/K model [
16,
17,
18]. Using these models, scholars have conducted in-depth studies on calculation accuracy, calculation speed, orientation, and boundary conditions, and concluded a series of results, which promoted the development and application of exploration of the noise field [
19,
20,
21,
22]. Zhou Jianbo et al. considered wind-induced waves as the noise source and used the transmission theory method instead of the traditional Monte Carlo method to construct a noise field model. They analyzed the spatial noise distribution and concluded that high-frequency noise had fluctuations in intensity at the offshore surface [
23]. Avrashi, G. et al. considered the problem of carrier frequency offset estimation in OFDM underwater acoustic communication and analyzed the causes of changing environmental impacts [
24]. Z.L. et al. analyzed wave fluctuation on underwater acoustic communication using measured data collected with USV [
25]. X.Z. et al. used quantile–quantile (Q-Q) plots to analyze real marine environmental data, interpreting the impulsive property of ocean ambient noise in shallow waters [
26]. X.Z. et al. applied Loffeld’s bistatic formula to SAS image processing, which provided a more accurate approximation of the spectrum compared to that based on phase center approximation [
27]. An, J. et al. propose underwater acoustic (UWA) communications using a generalized sinusoidal frequency modulation (GSFM) waveform, which makes full use of the time and frequency variation laws of the marine environment in experimental data [
28]. Zhang, Y. et al. proposed a deep-learning-based orthogonal frequency division multiplexing receiver for underwater acoustic communications to process marine environmental data through neural networks [
29].
The stratum structure of the ocean space determines the multi-channel coherent structure characteristics of the ocean sound field. The motion of the transmitter end, the interface, and the receiving sensor affect the spatiotemporal fluctuation characteristics of the sound field, which shows that the channel response function is time-varying and space-varying. The feature of time-varying and space-varying channels is the key point to manage to achieve effective and stable UAC systems. In this study, the signal field and noise field were evaluated by establishing a model and obtaining data through experiments, and the spatial-temporal distribution of signals was summarized to provide theoretical support for the design of UAC systems.
3. Analysis of the Time Fluctuation of Underwater Acoustic Communication Signals
The time window of a UAC system is smaller than other systems. Therefore, this study mainly analyzed the impact of small-scale spatial-temporal fluctuations caused by environmental parameters, such as wind and waves, on underwater acoustic communication. Moreover, environmental factors, such as ocean currents, tidal waves, and internal waves, with large spatial-temporal fluctuations were not considered.
3.1. Statistics of the Time Fluctuation of Low-Frequency Signal Fields
When an acoustic signal propagates in a shallow sea channel, it also has an undulating effect that changes over time, which corresponds to a time-varying channel in underwater acoustic communication. In this section, based on the spatial fluctuations of the signal field, the temporal fluctuations of the signal field were studied. The experimental ExQD_1701 data was statistically analyzed. In order to fully consider the selective frequency fading of the signal and ignore the effect of bandwidth on the time fluctuation of the signal field, the analysis used single-frequency signals. The time fluctuations in the low-frequency signal field and the high-frequency signal field were examined.
First, we analyzed the time fluctuation of the low-frequency signal. The frequencies of the transmitted signal were 95 Hz and 400 Hz, and the sound source level of the transmitted transducer was stable.
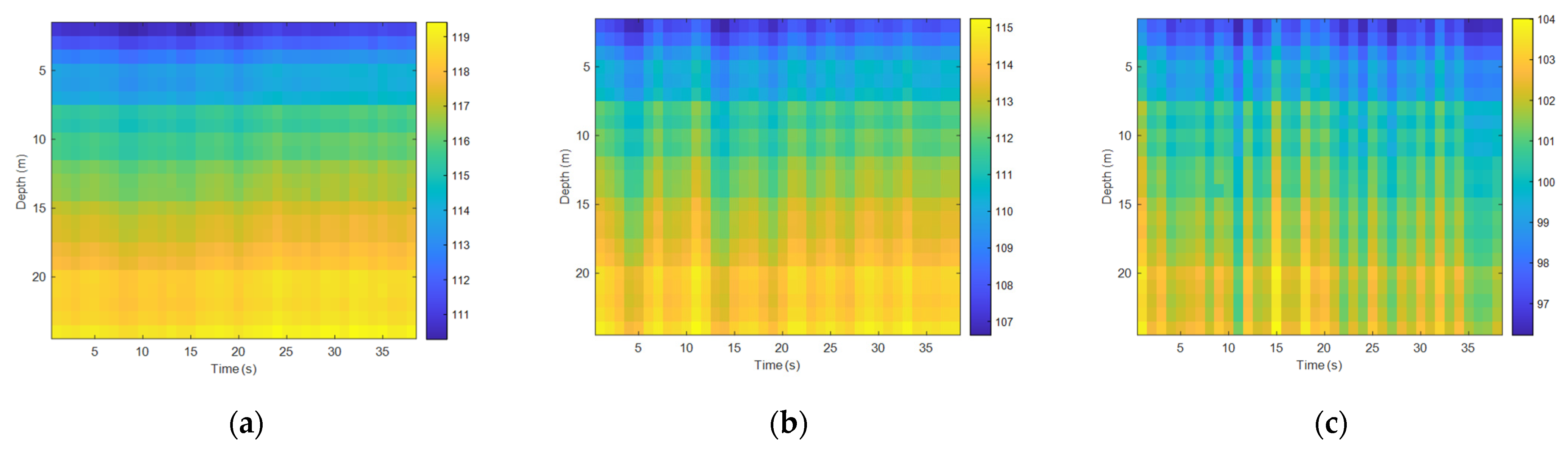
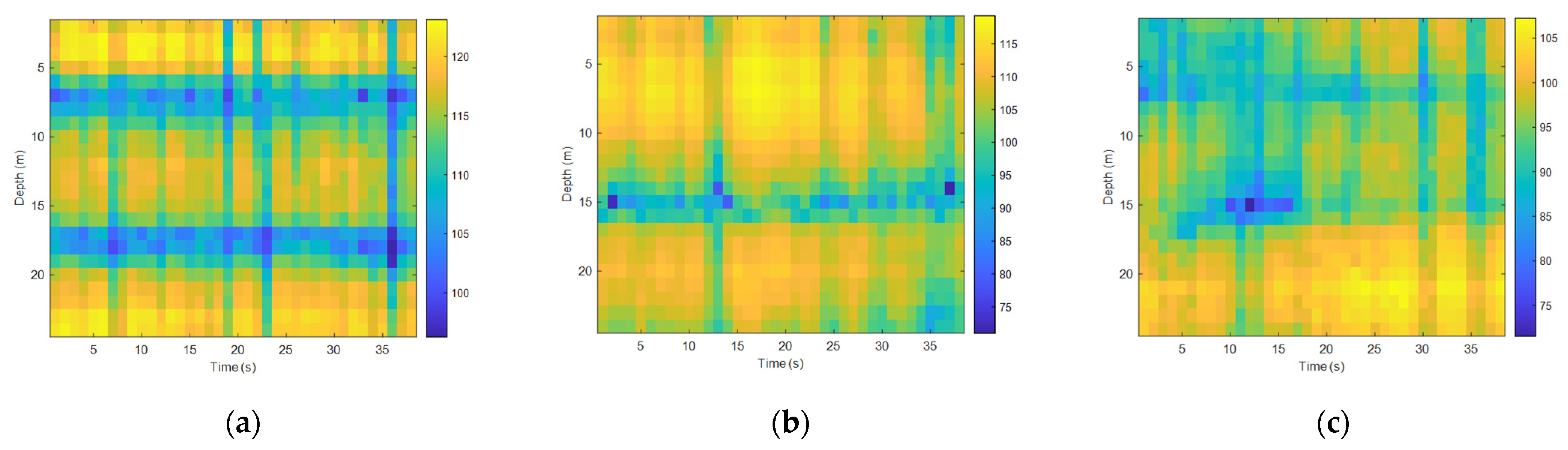
Figure 12 and
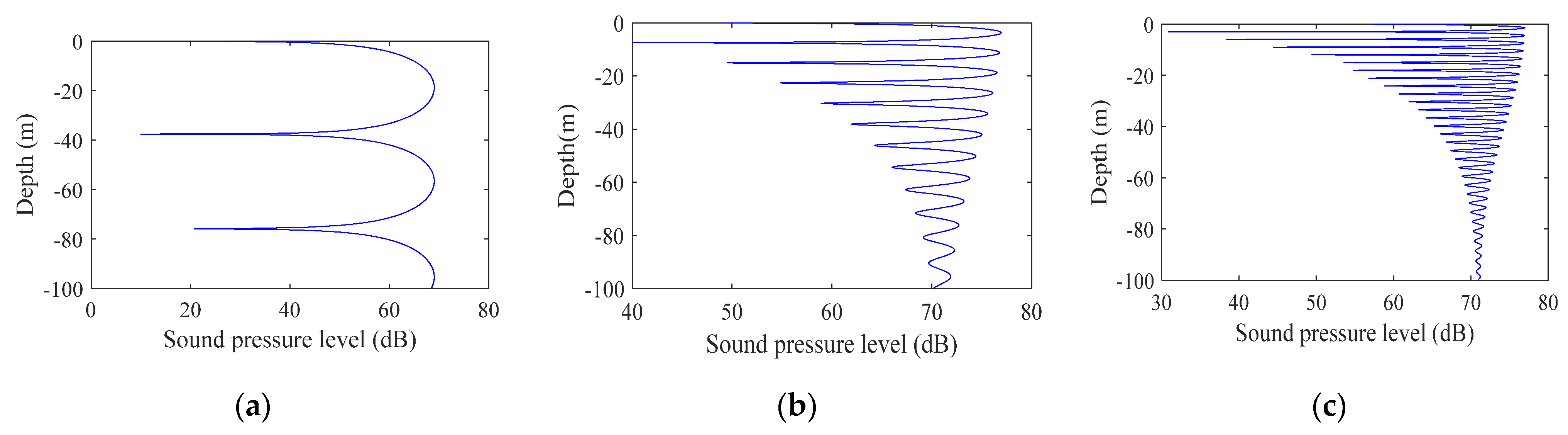
Figure 13 show the spurious color maps of the spatiotemporal distribution of the single-frequency signals (95 Hz and 400 Hz) at different distances. The vertical axis represents the water depth; the horizontal axis is the time when the signal was collected. With the increase in the horizontal distance between the transmitting and receiving ends, the signal strength increased significantly with time, which verified the conclusion of the theoretical calculations. The variation law of the signal intensity in the vertical direction was also consistent with the previous experimental results. When the frequency remained unchanged, the time fluctuation of the near-sea surface signal was larger than the sea floor fluctuation with the increase of the horizontal distance. With the increase in frequency, the number of normal wave modes of the signal field increased and the time fluctuation became stable.
- 2.
Statistics of the time fluctuation of high-frequency signal fields
Analyzing the time fluctuations of high-frequency signals and selecting the 5 kHz–20 kHz communication frequency band were commonly used in underwater acoustic communication experiments, with the transmitted single frequency signals at 12 kHz and 20 kHz being used. The sound source level of the transmitting transducer was stable and it was the same as the processing flow of the time fluctuation of the low-frequency signal field.
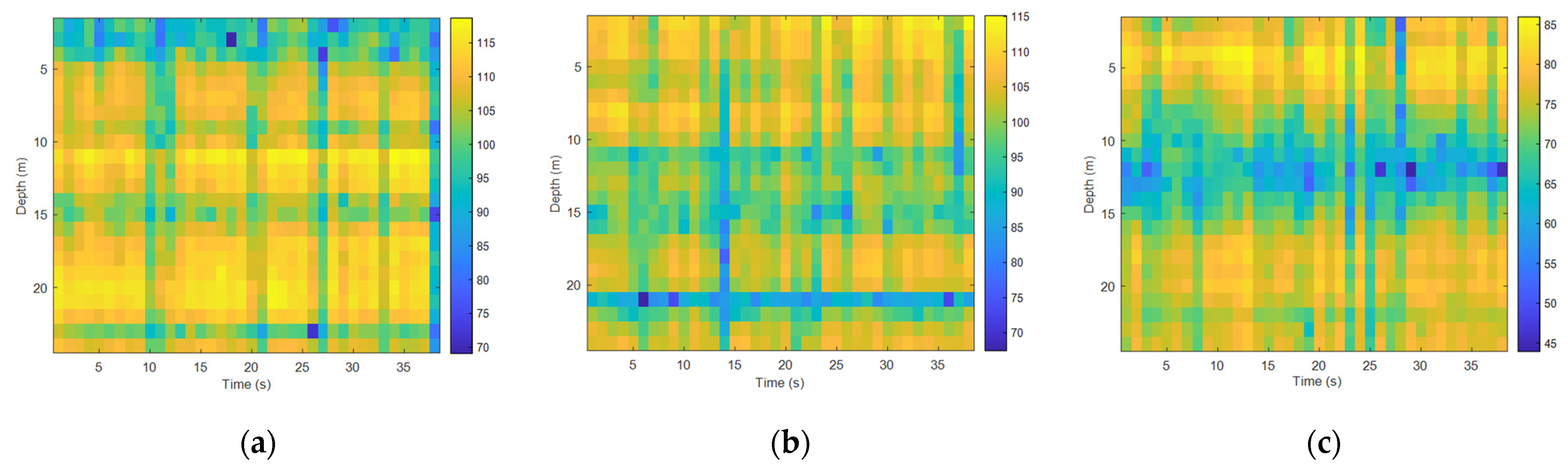
Figure 14 and
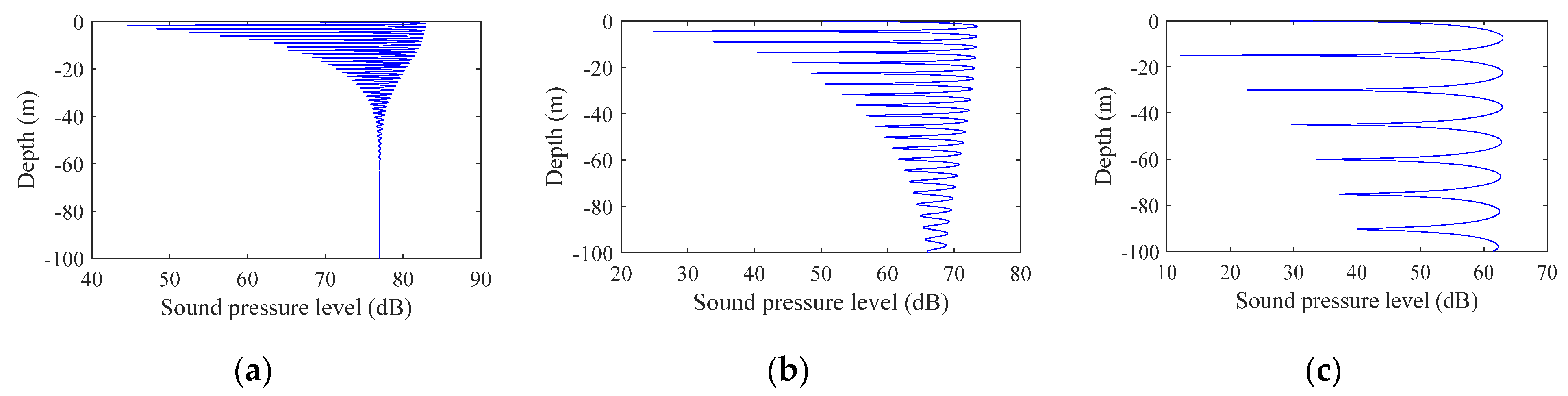
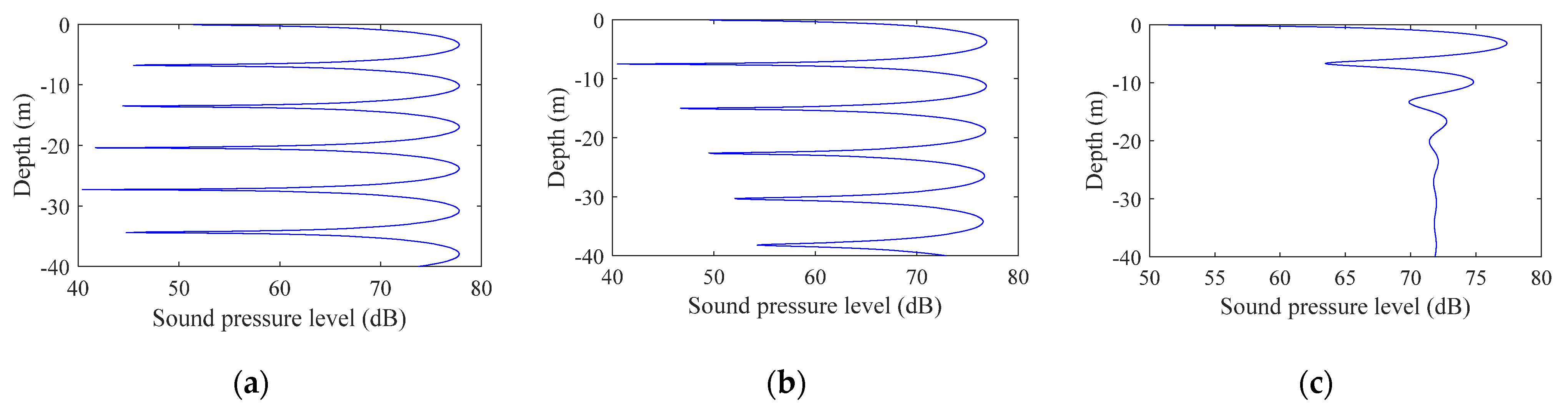
Figure 15 show the spurious color maps of the spatiotemporal distribution of the single-frequency signals (12 kHz and 20 kHz) at different distances. The abscissa represents the time when the signal was collected, and the ordinate is the water depth, which indicates the distribution of the hydrophones from the surface to the sea floor. With the increase in distance, the time distribution of high-frequency signals became more pronounced, which showed that the channel structure stabilization time became shorter in underwater acoustic communication. As the frequency increased, the wavelength of the acoustic wave became shorter, the signal field became more complex under the influence of scattering and interference caused by interface fluctuations, and the fluctuation law of single-frequency signals appeared to be less significant.
3.2. Analysis of the Time Distribution Characteristics of Noise Fields
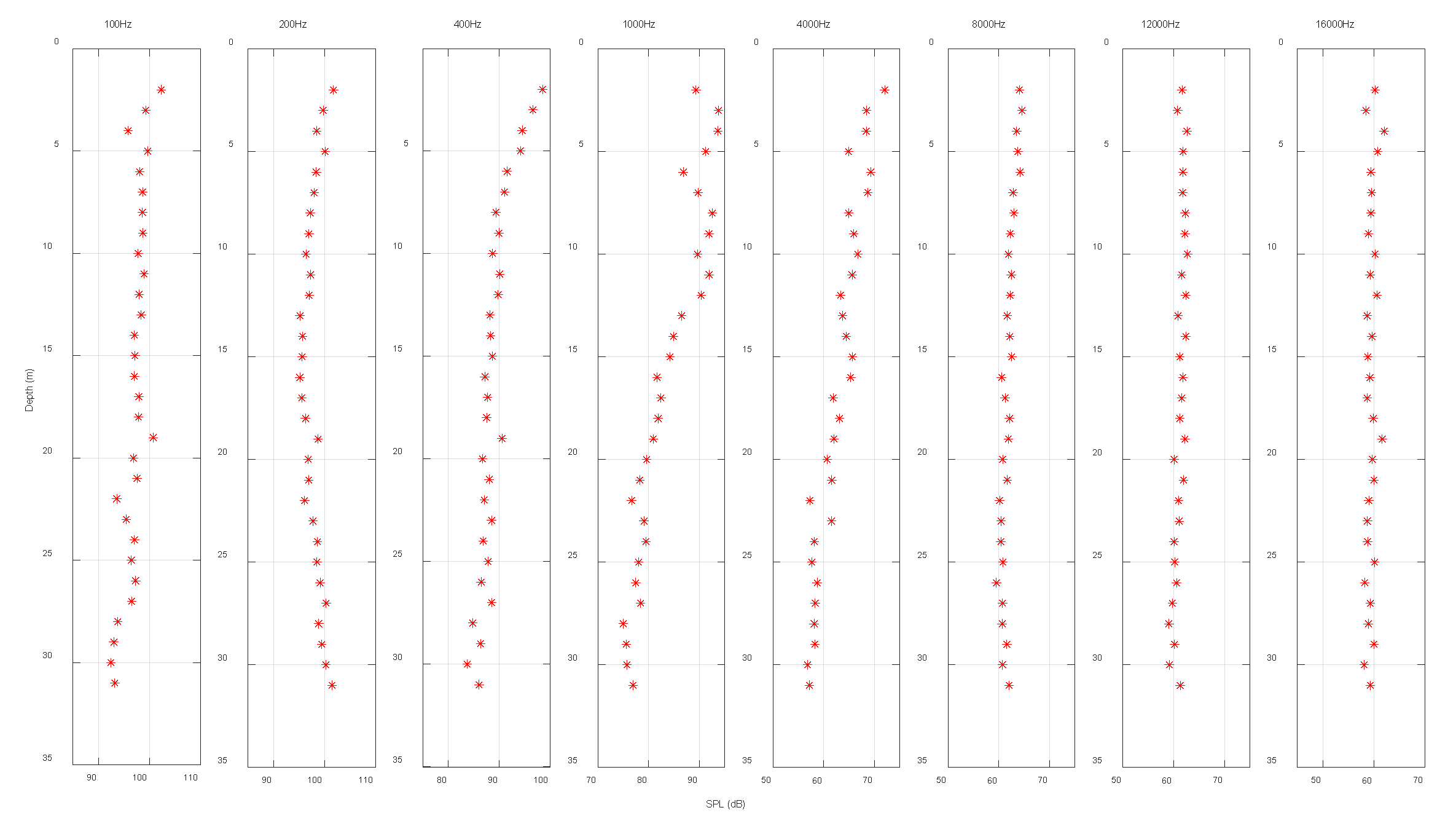
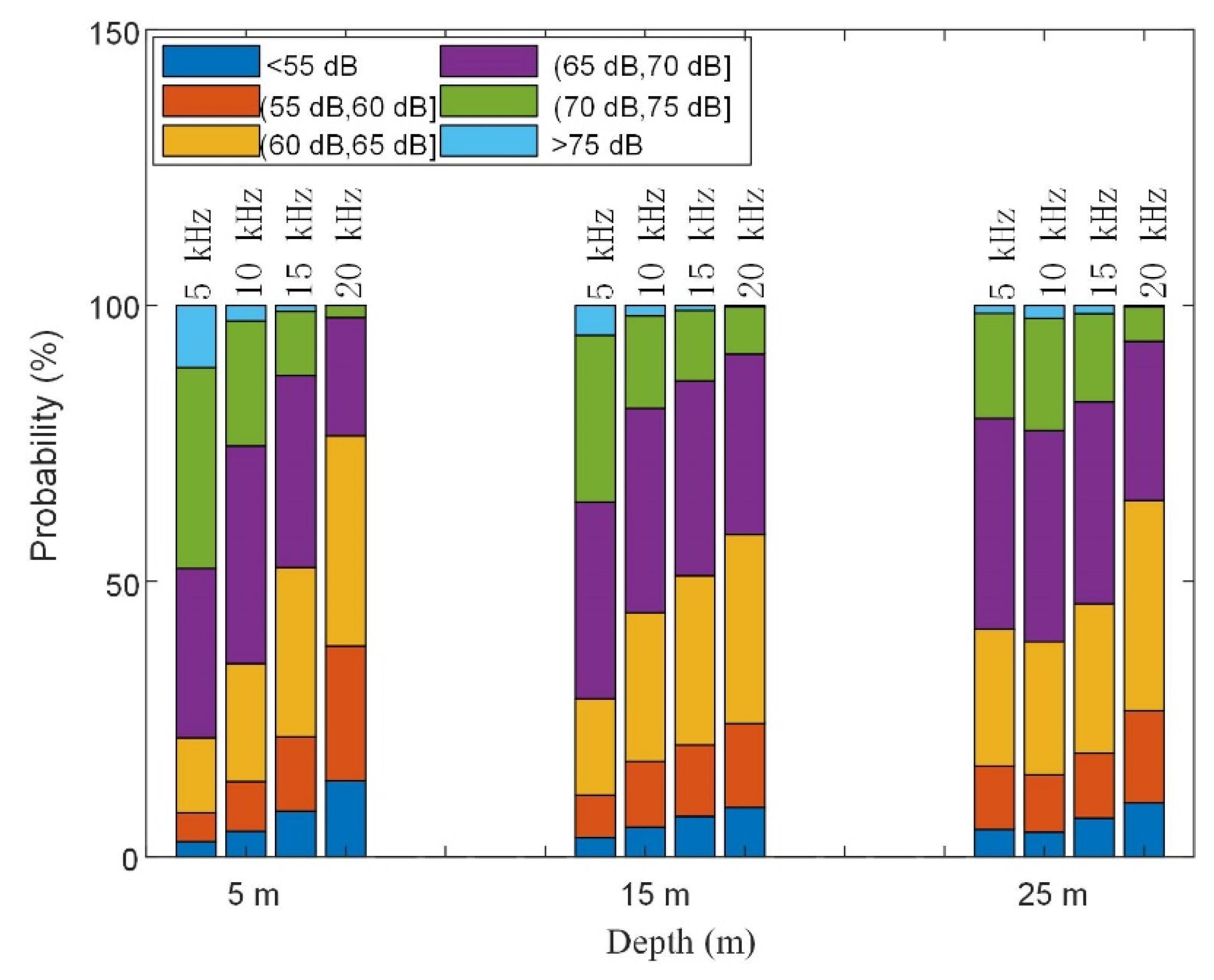
The time distribution characteristics of the noise fields were mainly targeted at the commonly used high-speed underwater acoustic communication frequency bands of 5 kHz–20 kHz. According to the foregoing, the vertical elements of the noise distribution were weakly correlated to each other. Therefore, the array elements at 5 m, 15 m, and 25 m were selected as research objects to study the noise time distribution in the surface, seabed, and water column situations. In the ExQD_1701 experiment, the environmental noise data in the experimental stage was randomly taken for 600 s, and a 1 s Hanning window was applied to intercept the data at an overlap rate of 0.66. Therefore, a total of 1762 sample points were obtained. Statistics of narrow-band noise distribution at different frequencies are shown in
Figure 16. In the high-frequency range, the environmental high-frequency noise was mainly distributed in the 60 dB to 70 dB range. As the frequency increased, the noise intensity gradually decreased; the noise intensity also gradually decreased as the depth increased. This was found to be in accordance with the theoretical model.
In order to study the time distribution characteristics of noise further, the probability distribution of the single-frequency noise intensity at a depth of 15 m (
Figure 16) was selected to explore the time distribution characteristics of noise.
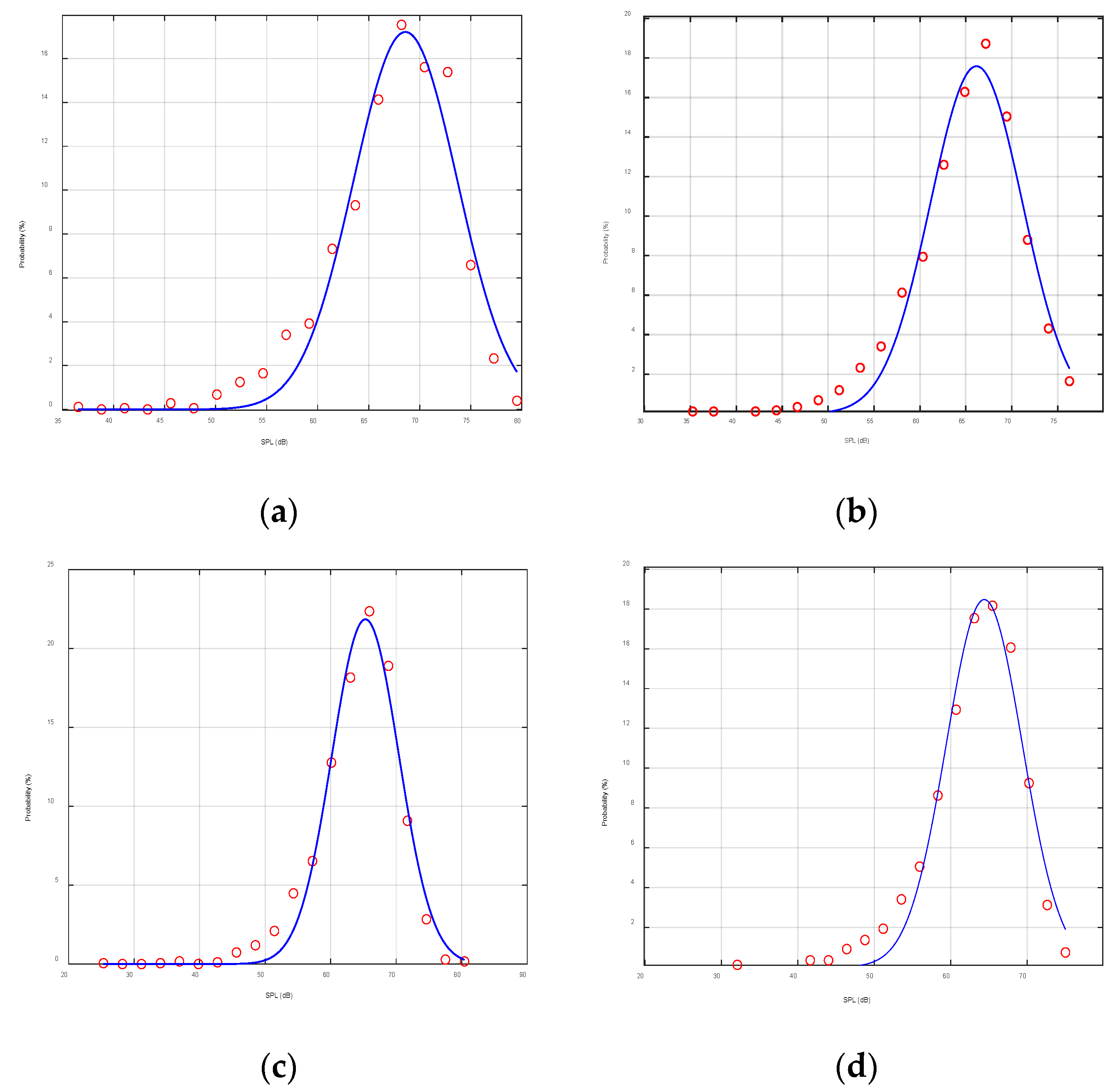
In
Figure 17, subfigure (a) shows the time probability distribution of the 5 kHz narrowband noise with a mean of 68.59 dB and a standard deviation of 5.08 dB, subfigure (b) shows the time probability distribution of the 10 kHz narrowband noise with a mean of 66.16 dB and a standard deviation of 5.01 dB, subfigure (c) shows the time probability distribution of the 15 kHz narrowband noise with a mean of 65.30 dB and a standard deviation of 5.10 dB, and subfigure (d) shows the 20 kHz narrowband noise time probability distribution with a mean of 64.39 dB and a standard deviation of 4.97 dB. A comparison of these figures demonstrated that the probability of noise intensity basically followed the Gaussian distribution with a relativity small fluctuation on the time scale. As shown in
Figure 17, the mean decreased with increasing frequency while the standard deviation remained stable.
According to the analyses of the above experimental results, it can be concluded that the time distribution of the high-frequency noise field was relatively stable. The analysis results can provide a theoretical guide and data support for the underwater acoustic communication quality evaluation model.
4. Analysis of the Spatiotemporal Variation Range of the Signal-to-Noise Ratio in Underwater Acoustic Communication
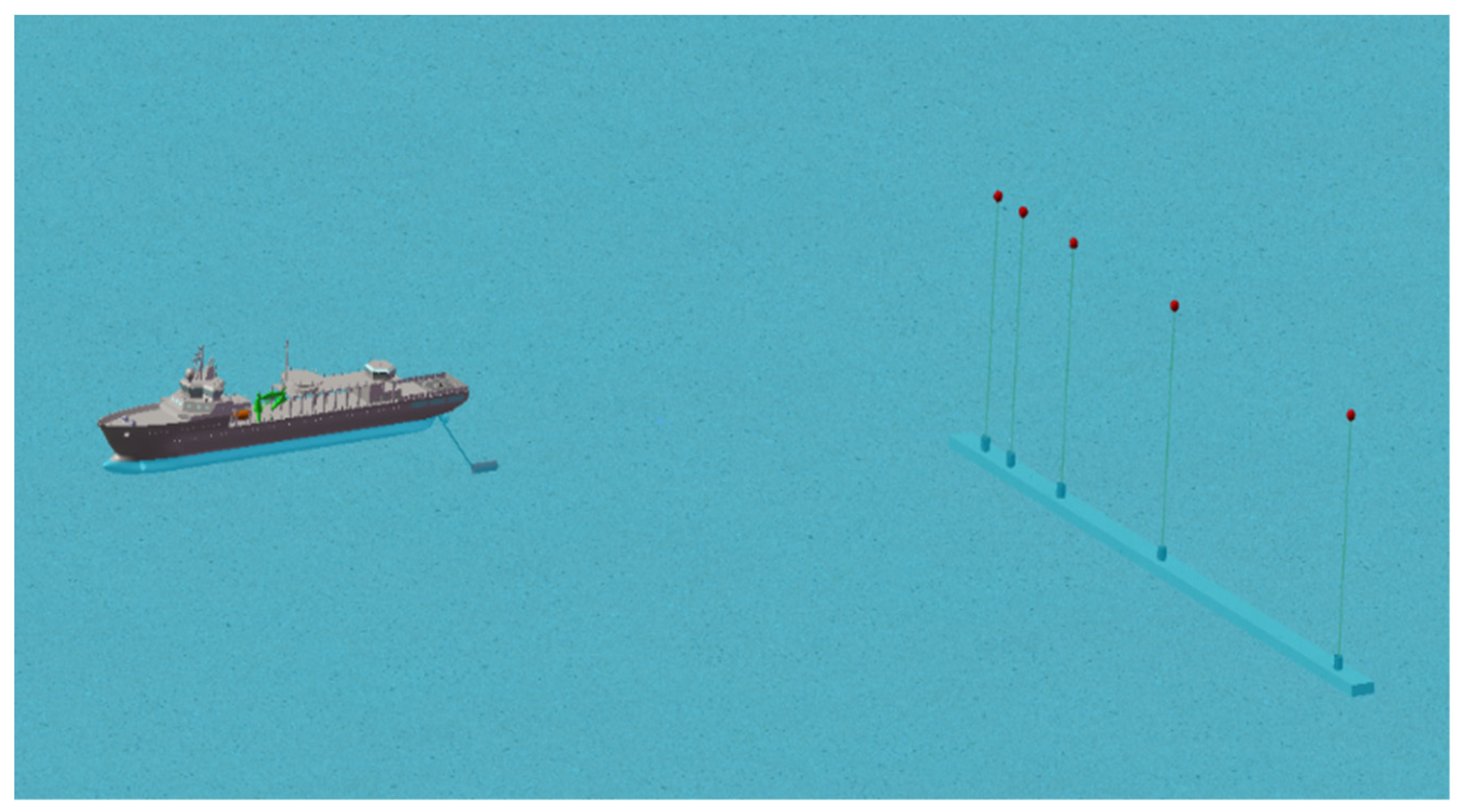
Based on the spatial-temporal distribution characteristics of the sound field obtained in the previous section, the spatial-temporal variation range of the SNR was analyzed from the experimental data. The data was selected from the Yellow Sea Acoustic Communication Experiment ExDQ_1702. The external field experimental parameters were: water with a depth of 15 m, communication signal frequency band of 8 kHz–16 kHz, transducer placement with a depth of 5 m, and five arrays for each receiving array. There were 32 hydrophones in each array and the distance between the hydrophones was exactly 0.5 m, the horizontal communication distance was 3.5 km, the experimental sea state was approximately two levels, and the vertical distribution of the entire bandwidth SNR was counted.
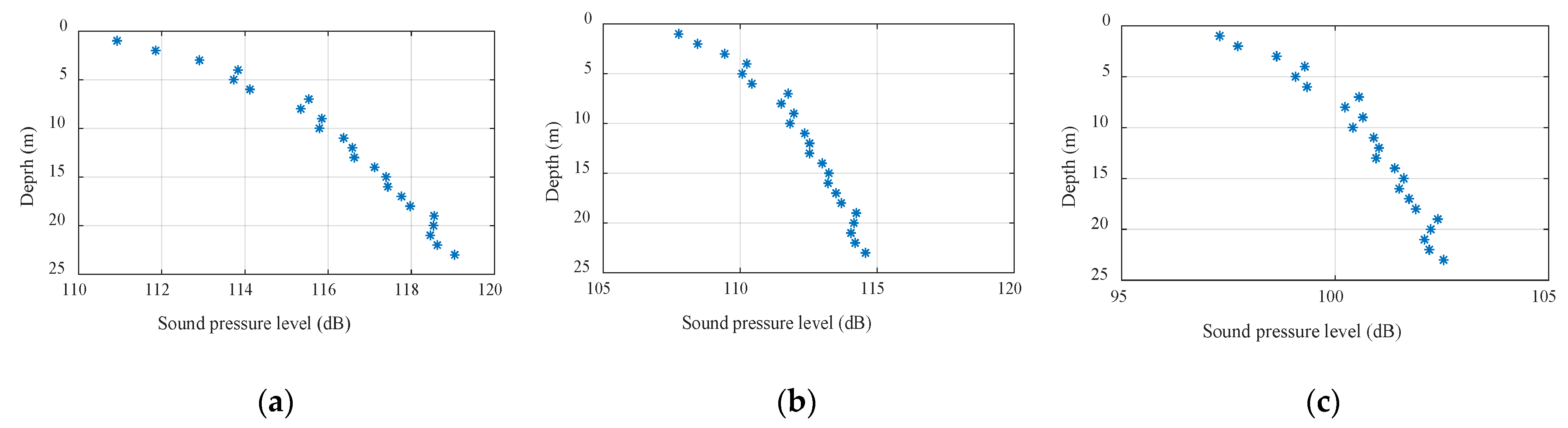
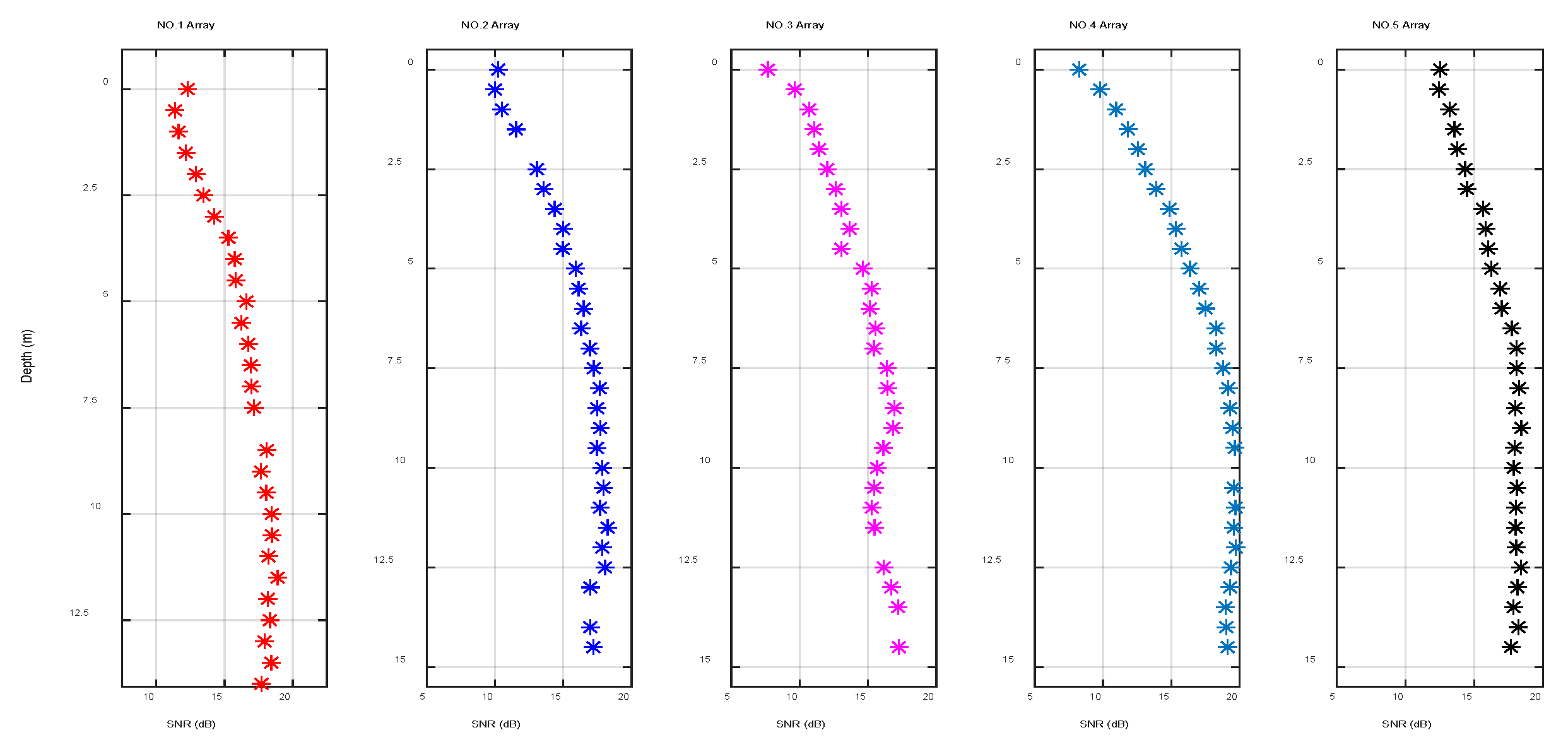
Figure 18 indicates the vertical fluctuation of the SNR of different arrays. Because the receiving array was limited by the size of the receiving ship, the relative horizontal distance between the arrays was not large and the gap between the SNR was small. During the underwater acoustic communication experiment, the auxiliary ship of the receiving ship was continuously working and displayed certain random fluctuations on the surface. As the receiving ship fluctuated up and down on the sea, the SNR of the surface array element was significantly lower than that of the underwater array element. With the increase in water depth, the variation range of the SNR gradually decreased and basically remained stable after 5 m underwater.
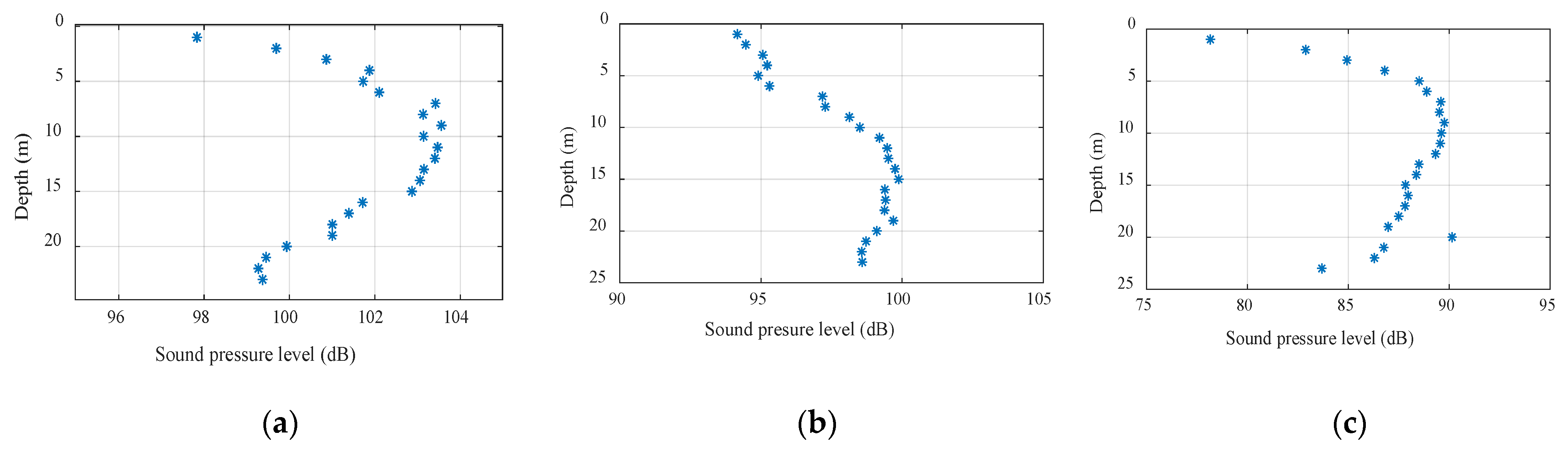
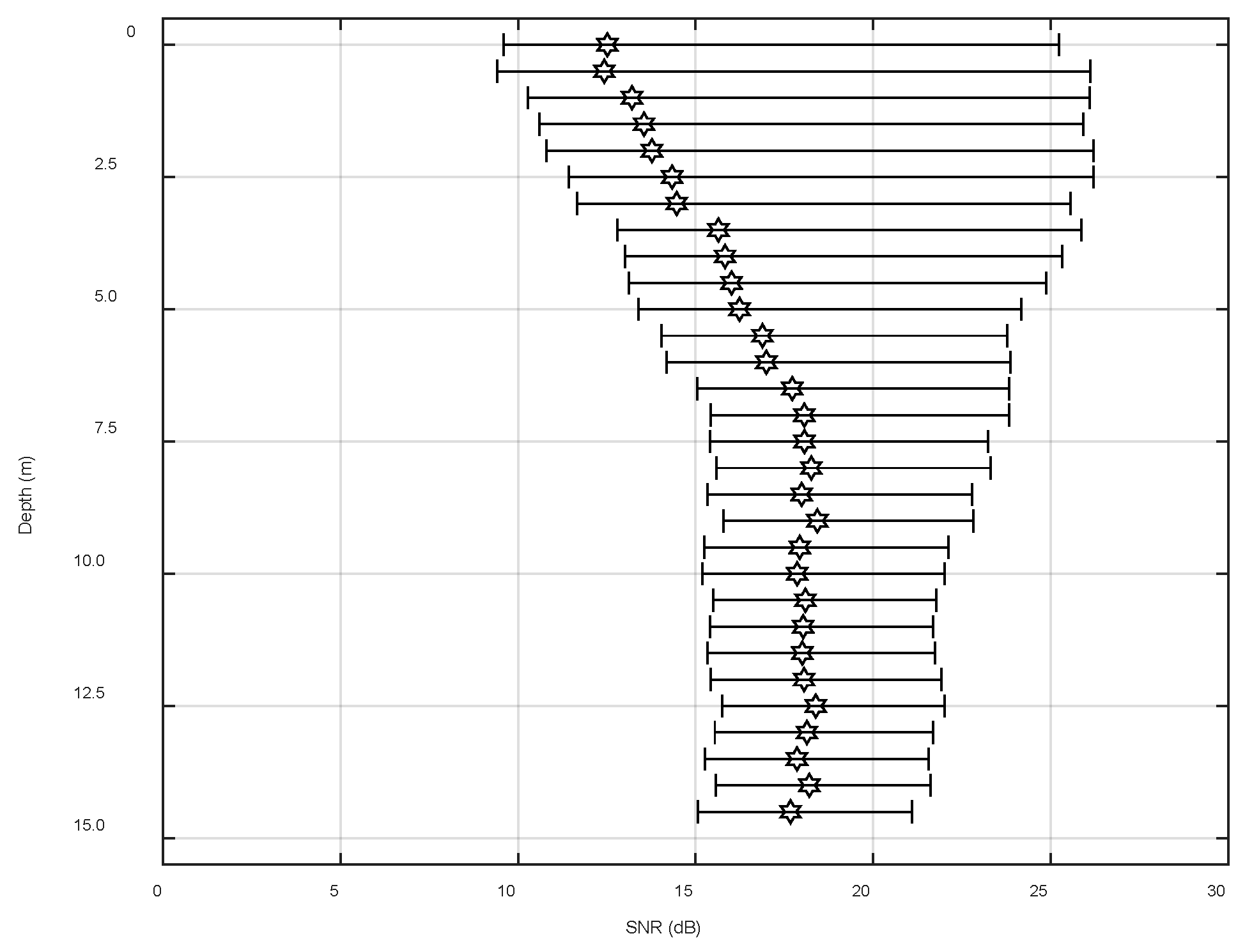
Figure 19 demonstrates the statistical range of the space-time variation of the SNR of array 5 over 31.5 s. The black hexagon indicates the mean of the SNR within the changing range, which is in line with
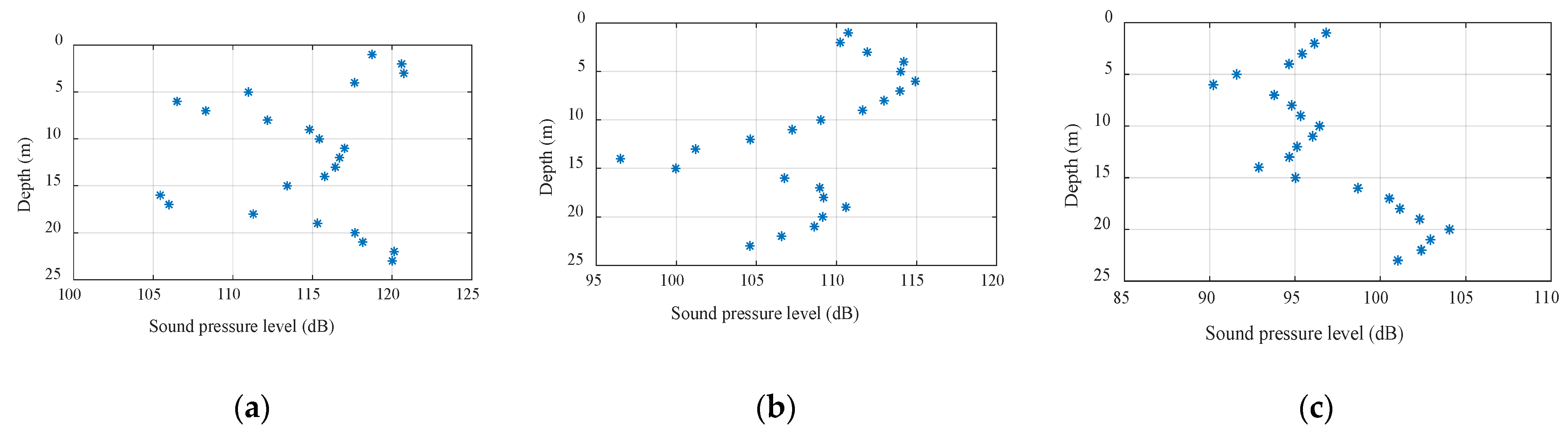
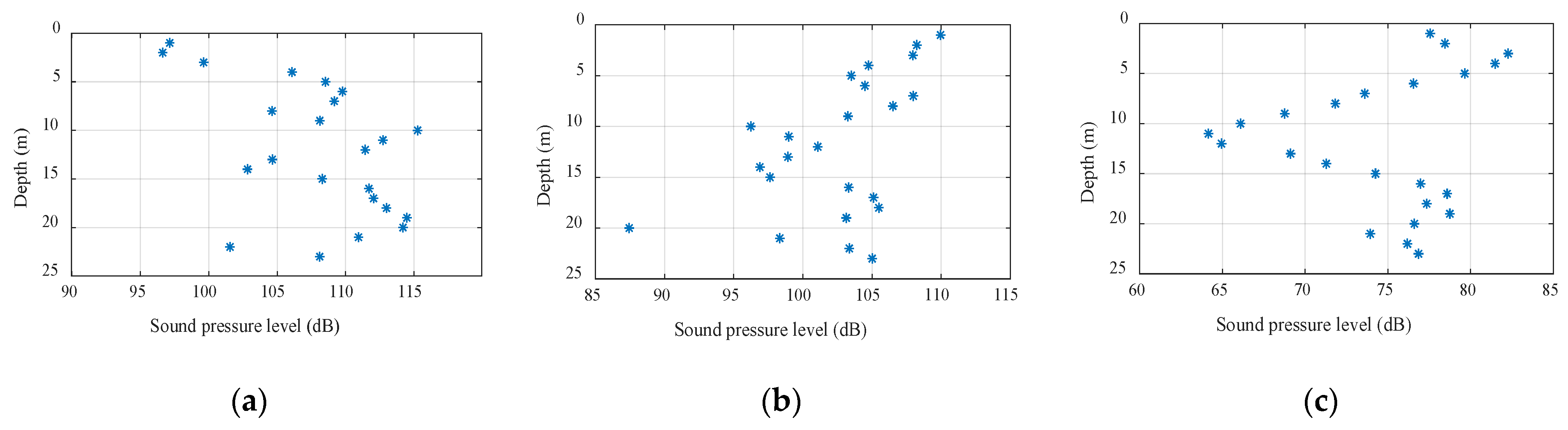
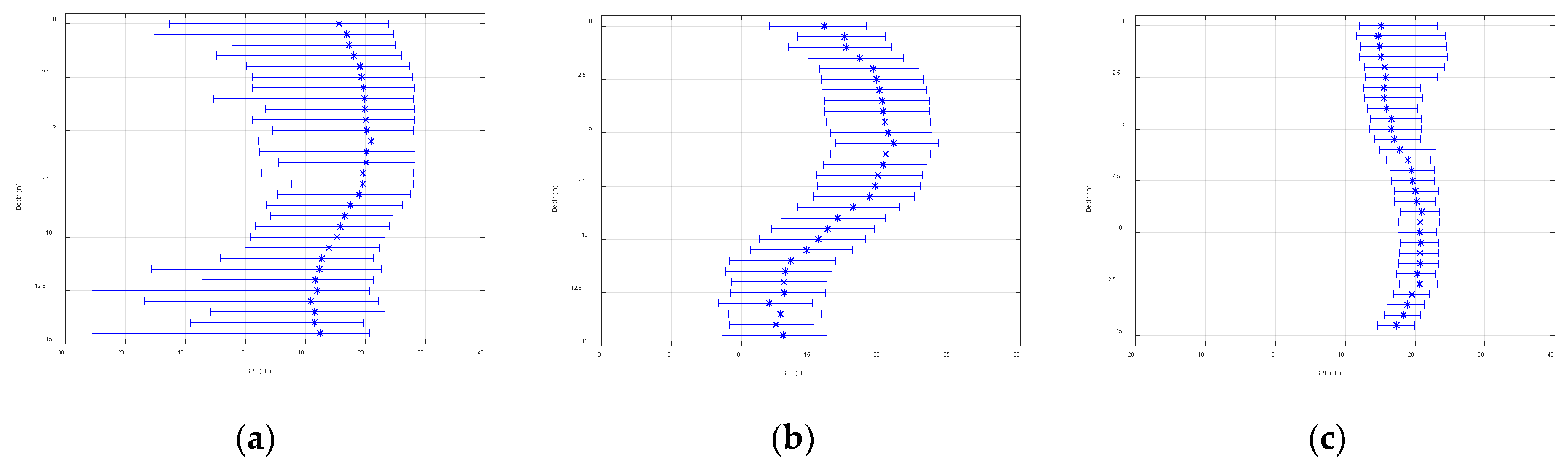
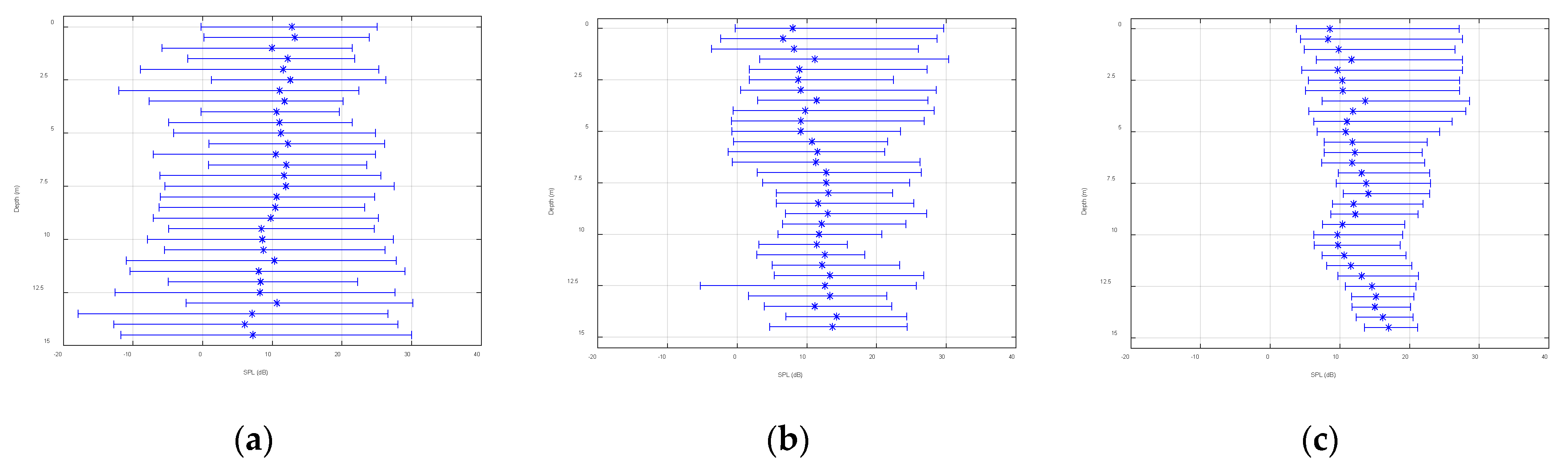
Figure 18. From the figure, it was relatively small and fluctuated dramatically, which matched the trend of the spatial and temporal distributions of the signal field and noise field of the single-frequency signal. However, the experimental signal was further processed to cope with the slight inconsistency of the fluctuation range. Signals with center frequencies of 9 kHz and 15 kHz and a length of 31.5 s were selected. The sampling frequency of the system was 50 kHz and the number of sample points was about 1,574,520. The processing results are shown in
Figure 20 and
Figure 21. In these figures, the abscissa is the SNR and the ordinate is the depth, and the plots show the variation ranges of the SNR within the signal time of 31.5 s at different depths, with the blue point representing the mean value. With the increase in the processing bandwidth, the spatial-temporal variation range of the SNR was significantly reduced, and the SNR of the surface array elements in the vertical direction was significantly lower than that in the water array elements, which verified the laws obtained using the theory and simulation experiments.
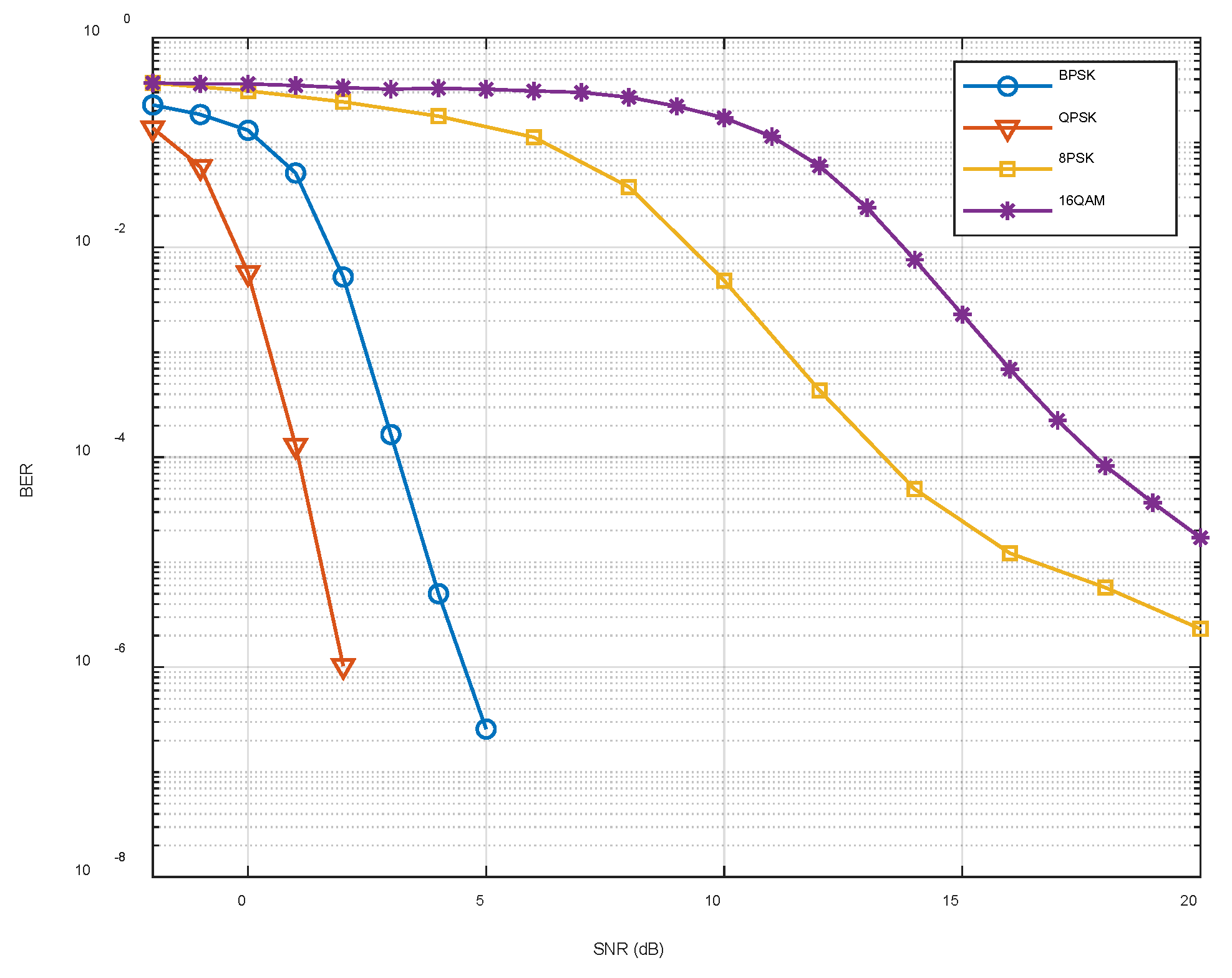
Figure 22 shows the simulation experiments performed under the fixed coding method using the channel parameters in the ExDQ_1702 experiment and the bit error rate corresponding to different signal-to-noise ratios (SNRs) and mapping methods. It can be seen that as the SNR increased, the bit error rate decreased. When the SNR in the experiment is less than 10 dB, the system should avoid using the 16QAM mapping method with a bit error rate higher than 0.01 and select other mapping methods according to the actual effective rate requirements.
5. Conclusions
Aiming at solving problems of the serious spatiotemporal fluctuations of the signal caused by the time-varying channel structure of the shallow sea, this study took identifying the spatiotemporal variation range of the SNR of underwater acoustic communication as the research goal, which was explored in the sound field from two aspects: the signal field and the noise field. The investigation of the temporal and spatial distribution of the signal field considered signal interference effects caused by surface reflection and scattering and theoretically deduced the variation of signal intensity fluctuations with horizontal distance, signal frequency, bandwidth, and deployment depth, which was further verified through both simulations and the Yellow Sea trial. The investigation of the noise field mainly considered the spatiotemporal distribution of high-frequency wind-induced noise and ship noise. Through processing and analysis of the experimental data, it was found that the time fluctuation of noise basically conformed to the Gaussian distribution, the spatial distribution consistency was high, and the near-sea surface noise was slightly higher than the bottom noise. Combining the analysis of the spatiotemporal distribution characteristics of the signal field and the noise field, it was found that when the signal frequency was high, the bandwidth was large; furthermore, when the horizontal distance between the transceivers was small and the depth of the receiver was deep, the spatial-temporal variation range of the SNR of the UAC system was relatively small. These characteristics were verified using sea trial data, and the derived law will be used to guide the parameter configuration and network protocol optimization of the UAC systems.
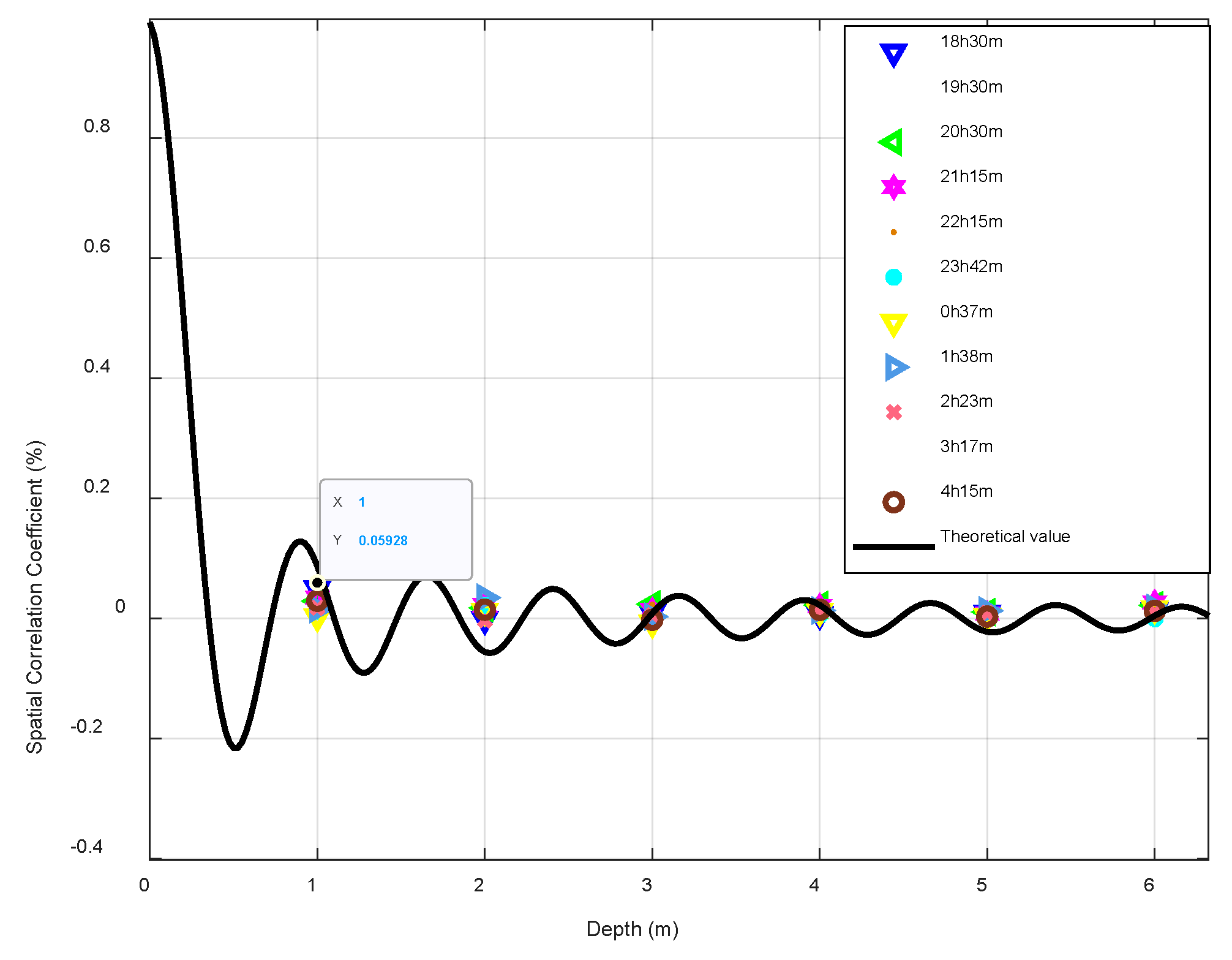
The correlation radius of the acoustic signal decreased with increasing frequency. The vertical correlation radius was smaller than the horizontal correlation radius. Therefore, in shallow sea acoustic communication, vertical arrays should be used for receiving to enhance the SNR and improve system reliability.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





















