
A Non-Contact Detection Method for Multi-Person Vital Signs Based on IR-UWB Radar

Abstract
:1. Introduction
2. Related Work
2.1. IR-UWB Radar Signal Model
2.2. Echo Model
3. Proposed Method
3.1. Clutter Suppression
3.1.1. Static Clutter Suppression
3.1.2. Clutter Signal Suppression
3.2. Target Range Estimation
3.3. Signal Separation Algorithm CIR-SS
3.4. Multi-Person TOA Estimation Algorithm Based on Threshold Crossing
- Set horizontal thresholds , left time and right time ;
- Compare the instantaneous power , , where is the original signal;
- Initialize. Set the dirty map by the power signal; set the sequence of TOA, where means from to ; also initialize the number of people and the number of iterations ;
- Find the index , whose magnitude is ;
- Determine if , then go to step 9;
- Update the dirty map by filling it with 0: ;
- If , we update its iteration number while skipping to step 4;
- Storing the TOA information , , while updating the number of iterations and the number of people, , , and go to step 4;
- The TOA position information of the respective person is .
3.5. CIR Based Multi-Person Azimuth Estimation Algorithm
4. Experimental Results and Analysis
4.1. Experimental System
4.1.1. Parameters of the Radar
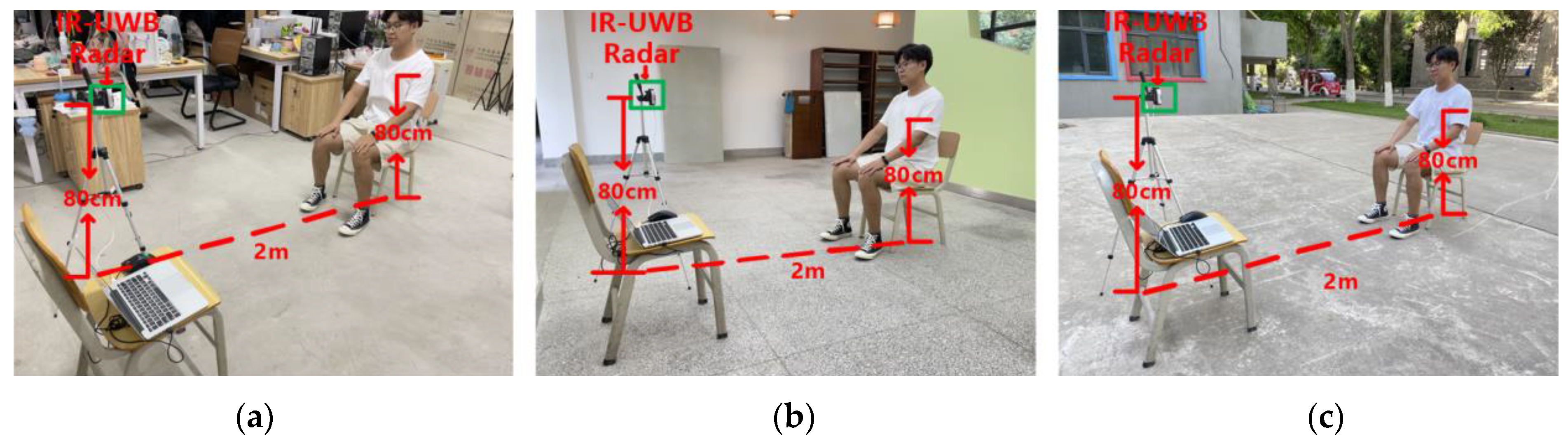
4.1.2. Experimental Scene
4.2. Performance Analysis of Vital Signs Algorithm
4.2.1. Influence of Different Distances
4.2.2. Environmental Effects on Vital Signs Signals
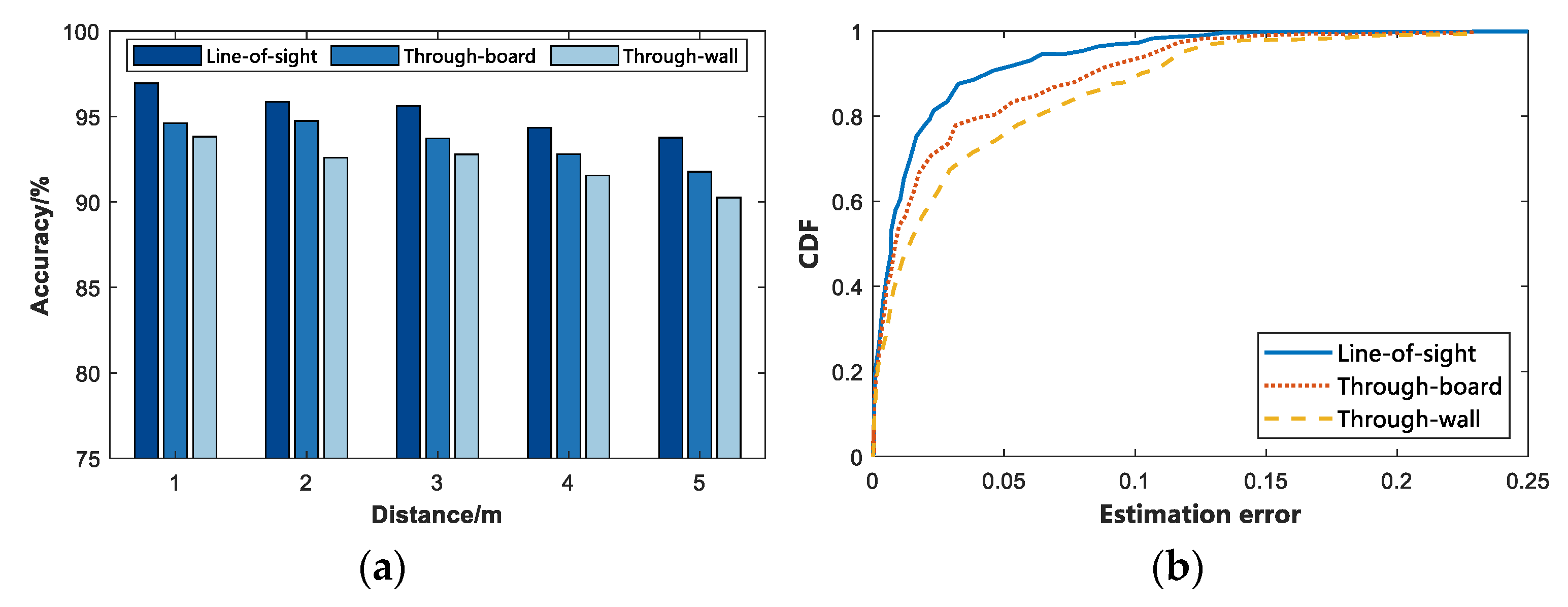
4.2.3. Impact of Penetrating Medium on the Algorithm
4.2.4. Effect of the Number of Subjects
4.2.5. Performance Analysis of Different Algorithms
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Roberts, K.P.; Phang, S.C.; Williams, J.B.; Hutchinson, D.J.; Kolstoe, S.E.; de Bie, J.; Williams, I.D.; Stringfellow, A.M. Increased personal protective equipment litter as a result of COVID-19 measures. Nat. Sustain. 2022, 5, 272–279. [Google Scholar] [CrossRef]
- Federal Communications Commission. Revision of Part 15 of the Commission’s Rules Regarding Ultra-Wideband Transmission Systems; First Report and Order, ET Docket 98-153, FCC 02-48; Federal Communications Commission: Washington, DC, USA, 2002; pp. 1–118.
- Yan, B.; Giorgetti, A.; Paolini, E. A track-before-detect algorithm for UWB radar sensor networks. Signal Process. 2021, 189, 108257. [Google Scholar] [CrossRef]
- Peng, P.; Yu, C.; Xia, Q.; Zheng, Z.; Zhao, K.; Chen, W. An Indoor Positioning Method Based on UWB and Visual Fusion. Sensors 2022, 22, 1394. [Google Scholar] [CrossRef] [PubMed]
- Liang, S.D. Sense-through-wall human detection based on UWB radar sensors. Signal Process. 2016, 126, 117–124. [Google Scholar] [CrossRef]
- Zhang, X.; Yang, X.; Ding, Y.; Wang, Y.; Zhou, J.; Zhang, L. Contactless Simultaneous Breathing and Heart Rate Detections in Physical Activity Using IR-UWB Radars. Sensors 2021, 21, 5503. [Google Scholar] [CrossRef]
- Yoo, S.; Wang, D.; Seol, D.M.; Lee, C.; Chung, S.; Cho, S.H. A multiple target positioning and tracking system behind brick-concrete walls using multiple monostatic IR-UWB radars. Sensors 2019, 19, 4033. [Google Scholar] [CrossRef]
- Lv, H.; Li, W.; Li, Z.; Zhang, Y.; Jiao, T.; Xue, H.; Liu, M.; Jing, X.; Wang, J. Characterization and identification of IR-UWB respiratory-motion response of trapped victims. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7195–7204. [Google Scholar] [CrossRef]
- Silva, B.; Hancke, G.P. IR-UWB-based non-line-of-sight identification in harsh environments: Principles and challenges. IEEE Trans. Ind. Informatics 2016, 12, 1188–1195. [Google Scholar] [CrossRef]
- Liang, F.; Liu, M.; Qi, F.G.; Lv, H.; Xue, H.J.; Lu, G.; Wang, J. Through the wall imaging of human vital signs based on UWB MIMO bioradar. Prog. Electromagn. Res. C 2018, 87, 119–133. [Google Scholar] [CrossRef]
- Khanh, L.D.; Duong, P.X. Principal Component Analysis for Heart Rate Measurement using UWB Radar. Int. J. Fuzzy Log. Intell. Syst. 2020, 20, 211–218. [Google Scholar] [CrossRef]
- Li, Z.; Li, W.; Lv, H.; Zhang, Y.; Jing, X.; Wang, J. A novel method for respiration-like clutter cancellation in life detection by dual-frequency IR-UWB radar. IEEE Trans. Microw. Theory Tech. 2013, 61, 2086–2092. [Google Scholar] [CrossRef]
- Wu, S.; Yao, S.; Liu, W.; Tan, K.; Xia, Z.; Meng, S.; Chen, J.; Fang, G.; Yin, H. Study on a novel UWB linear array human respiration model and detection method. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 125–140. [Google Scholar] [CrossRef]
- Liu, L.; Liu, Z.; Xie, H.; Barrowes, B.; Bagtzoglou, A.C. Numerical simulation of UWB impulse radar vital sign detection at an earthquake disaster site. Ad Hoc Netw. 2014, 13, 34–41. [Google Scholar] [CrossRef]
- Nezirovic, A.; Yarovoy, A.G.; Ligthart, L.P. Signal processing for improved detection of trapped victims using UWB radar. IEEE Trans. Geosci. Remote Sens. 2009, 48, 2005–2014. [Google Scholar] [CrossRef]
- Zhu, F.; Xu, Y.Y.; Fang, G.Y. Vital signal detection method based on principal component analysis and empirical mode decomposition for ultra wideband radar. Acta Electron. Sin. 2012, 40, 344. [Google Scholar]
- Shyu, K.-K.; Chiu, L.-J.; Lee, P.-L.; Tung, T.-H.; Yang, S.-H. Detection of breathing and heart rates in UWB radar sensor data using FVPIEF-based two-layer EEMD. IEEE Sens. J. 2018, 19, 774–784. [Google Scholar] [CrossRef]
- Duan, Z.; Liang, J. Non-contact detection of vital signs using a UWB radar sensor. IEEE Access 2018, 7, 36888–36895. [Google Scholar] [CrossRef]
- Wang, P.; Qi, F.; Liu, M.; Liang, F.; Xue, H.; Zhang, Y.; Lv, H.; Wang, J. Noncontact heart rate measurement based on an improved convolutional sparse coding method using IR-UWB radar. IEEE Access 2019, 7, 158492–158502. [Google Scholar] [CrossRef]
- El-Bardan, R.; Malaviya, D.; Di Rienzo, A. On the estimation of respiration and heart rates via an IR-UWB radar: An algorithmic perspective. In Proceedings of the 2017 IEEE International Conference on Microwaves, Antennas, Communications and Electronic Systems (COMCAS), Tel-Aviv, Israel, 13–15 November 2017. [Google Scholar]
- Wisland, D.T.; Granhaug, K.; Pleym, J.R.; Andersen, N.; Hjortland, H.A. Remote monitoring of vital signs using a CMOS UWB radar transceiver. In Proceedings of the 2016 14th IEEE International New Circuits and Systems Conference (NEWCAS), Vancouver, BC, Canada, 26–29 June 2016. [Google Scholar]
- Sakamoto, T.; Muragaki, M.; Tamura, K.; Okumura, S.; Sato, T.; Mizutani, K.; Inoue, K.; Fukuda, T.; Sakai, H. Measurement of instantaneous heart rate using radar echoes from the human head. Electron. Lett. 2018, 54, 864–866. [Google Scholar] [CrossRef]
- Liu, B.; Fu, Q.; Chen, Z.; Tao, W.; Dai, Z. A new method for vital sign monitoring using IR-UWB radar. IOP Conf. Ser. Earth Environ. Sci. 2020, 512, 012158. [Google Scholar] [CrossRef]
- Schires, E.; Georgiou, P.; Lande, T.S. Vital sign monitoring through the back using an UWB impulse radar with body coupled antennas. IEEE Trans. Biomed. Circuits Syst. 2018, 12, 292–302. [Google Scholar] [CrossRef]
- Nguyen, V.; Javaid, A.Q.; Weitnauer, M.A. Spectrum-averaged harmonic path (SHAPA) algorithm for non-contact vital sign monitoring with ultra-wideband (UWB) radar. In Proceedings of the 2014 36th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Chicago, IL, USA, 26–30 August 2014; pp. 2241–2244. [Google Scholar]
- Ha, T.; Kim, J. Detection and localization of multiple human targets based on respiration measured by IR-UWB radars. In Proceedings of the 2019 IEEE SENSORS, Montreal, QC, Canada, 27–30 October 2019. [Google Scholar]
- Choi, J.W.; Nam, S.S.; Cho, S.H. Multi-human detection algorithm based on an impulse radio ultra-wideband radar system. IEEE Access 2016, 4, 10300–10309. [Google Scholar] [CrossRef]
- Mercuri, M.; Lorato, I.R.; Liu, Y.-H.; Wieringa, F.; Van Hoof, C.; Torfs, T. Vital-sign monitoring and spatial tracking of multiple people using a contactless radar-based sensor. Nat. Electron. 2019, 2, 252–262. [Google Scholar] [CrossRef]
- Yan, J.; Hong, H.; Zhao, H.; Li, Y.; Gu, C.; Zhu, X. Through-wall multiple targets vital signs tracking based on VMD algorithm. Sensors 2016, 16, 1293. [Google Scholar] [CrossRef] [PubMed]
- Ding, C.; Yan, J.; Zhang, L.; Zhao, H.; Hong, H.; Zhu, X. Noncontact multiple targets vital sign detection based on VMD algorithm. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017. [Google Scholar]
- Crochiere, R. A weighted overlap-add method of short-time Fourier analysis/synthesis. IEEE Trans. Acoust. Speech Signal Process. 1980, 28, 99–102. [Google Scholar] [CrossRef]
- Liang, X.; Zhang, H.; Gulliver, T.A.; Fang, G.; Ye, S. An improved algorithm for through-wall target detection using ultra-wideband impulse radar. IEEE Access 2017, 5, 22101–22118. [Google Scholar] [CrossRef]
- Gao, Y.; Zheng, Y.; Diao, S.; Zhu, Y.; Heng, C.H. An integrated beamformer for IR-UWB receiver in 0.18-µm CMOS. In Proceedings of the 2011 IEEE International Symposium of Circuits and Systems (ISCAS), Rio de Janeiro, Brazil, 15–18 May 2011. [Google Scholar]
- Liu, Y.; Zhang, W.; Liu, Y. A fully integrated 4-channel beamformer based on TTD phased array in 0.18 μm CMOS. Microelectron. J. 2018, 80, 81–86. [Google Scholar] [CrossRef]
- Wang, L.; Lian, Y.; Heng, C.H. 3–5 GHz 4-Channel UWB Beamforming Transmitter with 1° Scanning Resolution Through Calibrated Vernier Delay Line in 0.13-μm CMOS. IEEE J. Solid-State Circuits 2012, 47, 3145–3159. [Google Scholar] [CrossRef]
- Dooghabadi, M.Z.; Hjortland, H.A.; Lande, T.S.B. A linear IR-UWB MIMO radar array. In Proceedings of the 2013 IEEE International Conference on Ultra-Wideband (ICUWB), Sydney, Australia, 15–18 September 2013. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subject (Sex) | Age | Height/cm | Weight/kg | Chest Width/cm |
|---|---|---|---|---|
| A (Male) | 24 | 175 | 73 | 103 |
| B (Male) | 23 | 181 | 86 | 106 |
| C (Male) | 26 | 165 | 56 | 91 |
| D (Male) | 32 | 183 | 88 | 98 |
| E (Female) | 23 | 166 | 63 | 88 |
| F (Female) | 21 | 163 | 55 | 85 |
| G (Female) | 24 | 168 | 72 | 96 |
| H (Female) | 44 | 175 | 70 | 105 |
| 1 m | 2 m | 3 m | 4 m | 5 m | |||
|---|---|---|---|---|---|---|---|
| Complex indoor | RR | Error | 5.24% | 6.07% | 5.44% | 7.21% | 8.75% |
| SNR(dB) | 10.52 | 9.72 | 8.54 | 8.10 | 7.73 | ||
| HR | Error | 6.32% | 6.48% | 6.89% | 7.13% | 8.20% | |
| SNR(dB) | 5.74 | 4.31 | 1.24 | −1.33 | −2.17 | ||
| Open indoor | RR | Error | 4.75% | 4.92% | 5.02% | 5.35% | 6.70% |
| SNR(dB) | 12.01 | 11.76 | 9.67 | 9.52 | 8.93 | ||
| HR | Error | 5.13% | 5.37% | 5.91% | 6.74% | 7.02% | |
| SNR(dB) | 7.89 | 6.33 | 4.31 | 3.92 | 1.77 | ||
| Open outdoor | RR | Error | 2.99% | 3.41% | 3.79% | 4.43% | 4.72% |
| SNR(dB) | 12.45 | 11.98 | 10.03 | 9.77 | 8.59 | ||
| HR | Error | 4.75% | 5.12% | 5.47% | 6.32% | 6.83% | |
| SNR(dB) | 8.32 | 7.25 | 5.29 | 4.03 | 2.71 |
| Vital Signs | Statistical Parameters | 1 Subject | 2 Subjects | 3 Subjects |
|---|---|---|---|---|
| RR | Mean | 0.0224 | −0.3621 | −0.5685 |
| SD | 0.3565 | 1.391 | 2.337 | |
| Mean − 1.96SD | −0.6764 | −3.089 | −5.149 | |
| Mean + 1.96SD | 0.7212 | 2.365 | 4.012 | |
| HR | Mean | −0.3074 | −0.9832 | −1.130 |
| SD | 1.193 | 2.350 | 3.140 | |
| Mean − 1.96SD | −2.646 | −5.590 | −7.285 | |
| Mean + 1.96SD | 2.031 | 3.623 | 5.024 |
| Papers | Published Year | Algorithm | RR_Error (%) | HR_Error (%) | SNR (dB) |
|---|---|---|---|---|---|
| [30] | 2017 | VMD Algorithm | 12.76 | 13.58 | −8.44 |
| [17] | 2019 | FVPIEF | 10.34 | 9.93 | −5.24 |
| [18] | 2019 | Convolutional Sparse Coding | 9.81 | 10.77 | −4.67 |
| [10] | 2020 | PCA | 6.69 | 8.52 | 4.19 |
| [23] | 2020 | Quadrature Demodulation | 5.63 | 5.37 | 3.23 |
| This study | Proposed | 5.14 | 4.87 | 6.56 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dang, X.; Zhang, J.; Hao, Z. A Non-Contact Detection Method for Multi-Person Vital Signs Based on IR-UWB Radar. Sensors 2022, 22, 6116. https://doi.org/10.3390/s22166116
Dang X, Zhang J, Hao Z. A Non-Contact Detection Method for Multi-Person Vital Signs Based on IR-UWB Radar. Sensors. 2022; 22(16):6116. https://doi.org/10.3390/s22166116
Chicago/Turabian StyleDang, Xiaochao, Jinlong Zhang, and Zhanjun Hao. 2022. "A Non-Contact Detection Method for Multi-Person Vital Signs Based on IR-UWB Radar" Sensors 22, no. 16: 6116. https://doi.org/10.3390/s22166116