
Advanced Marine Predator Algorithm for Circular Antenna Array Pattern Synthesis

 ,
,  , , and
, , and
Abstract
:1. Introduction
- Introduction of an improved velocity (stepsize) update strategy and an adaptive parameter to control the velocity of the prey, thus improving the exploration capability and mitigating the stagnancy problem of MPA.
- A chaotic sequence called the Chebyshev map is added to the prey update to aid the stepsize and thus enhance the exploitation ability of the algorithm. These improvements effectively help MPA to overcome the problem of being stuck easily in local optimum, as well as improve the convergence rate of the overall algorithm.
- We formulated the peak SLL suppression optimization problem for the synthesis of CAA and applied the novel AMPA to solve the objective functions. The excitation current and the inter-element spacing of four examples of CAA elements are jointly optimized by using AMPA and five other existing algorithms.
2. Antenna Array Model and Problem Formulation
2.1. The CAA Model
2.2. Problem Formulation
3. Proposed Algorithm
3.1. Marine Predators Algorithm (MPA)
3.2. Advanced Marine Predators Algorithm (AMPA)
3.2.1. Initialization
3.2.2. Optimization Process
| Algorithm 1. Pseudo-code of advanced marine predator algorithm (AMPA) (AMPA code) |
| Initialize parameters: m, FADs, C Initialize search agents (Prey) populations xi = (xi, xi, …, xi) and step size While maximum iteration is not met Evaluate the fitness Construct the Elite and Prey matrix using Equation (14) Accomplish memory saving If rand < 0.6 Update the stepsize and prey using Equations (15) and (16) Else Update prey using Equation (12) End (if) Evaluate fitness of the updated prey Save and update the Elite Apply the FADs effect and update using Equation (13) End while |
4. Simulation Results
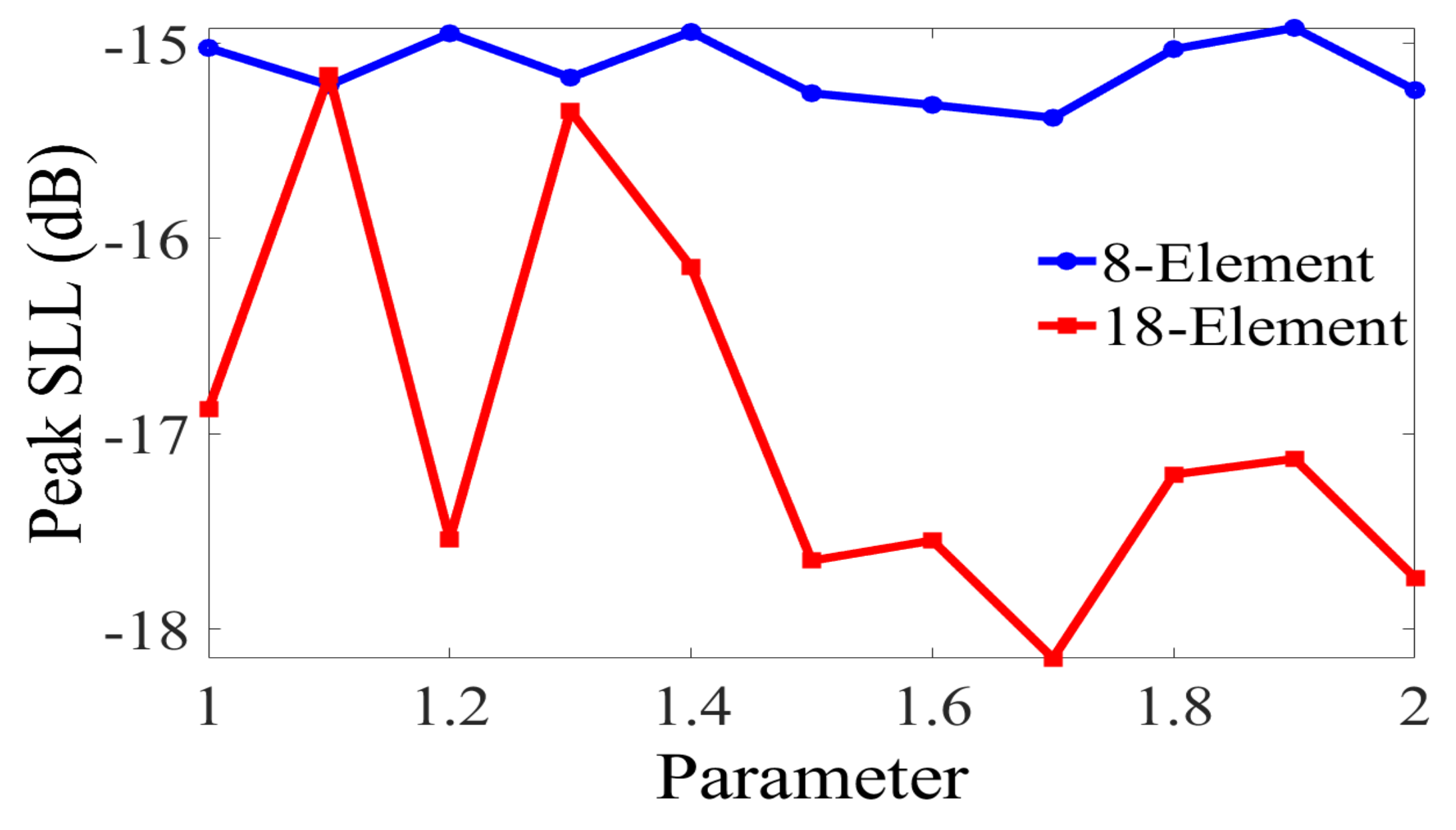
4.1. Parameter Value Tuning
4.2. Simulation Result for the CAA Pattern Synthesis
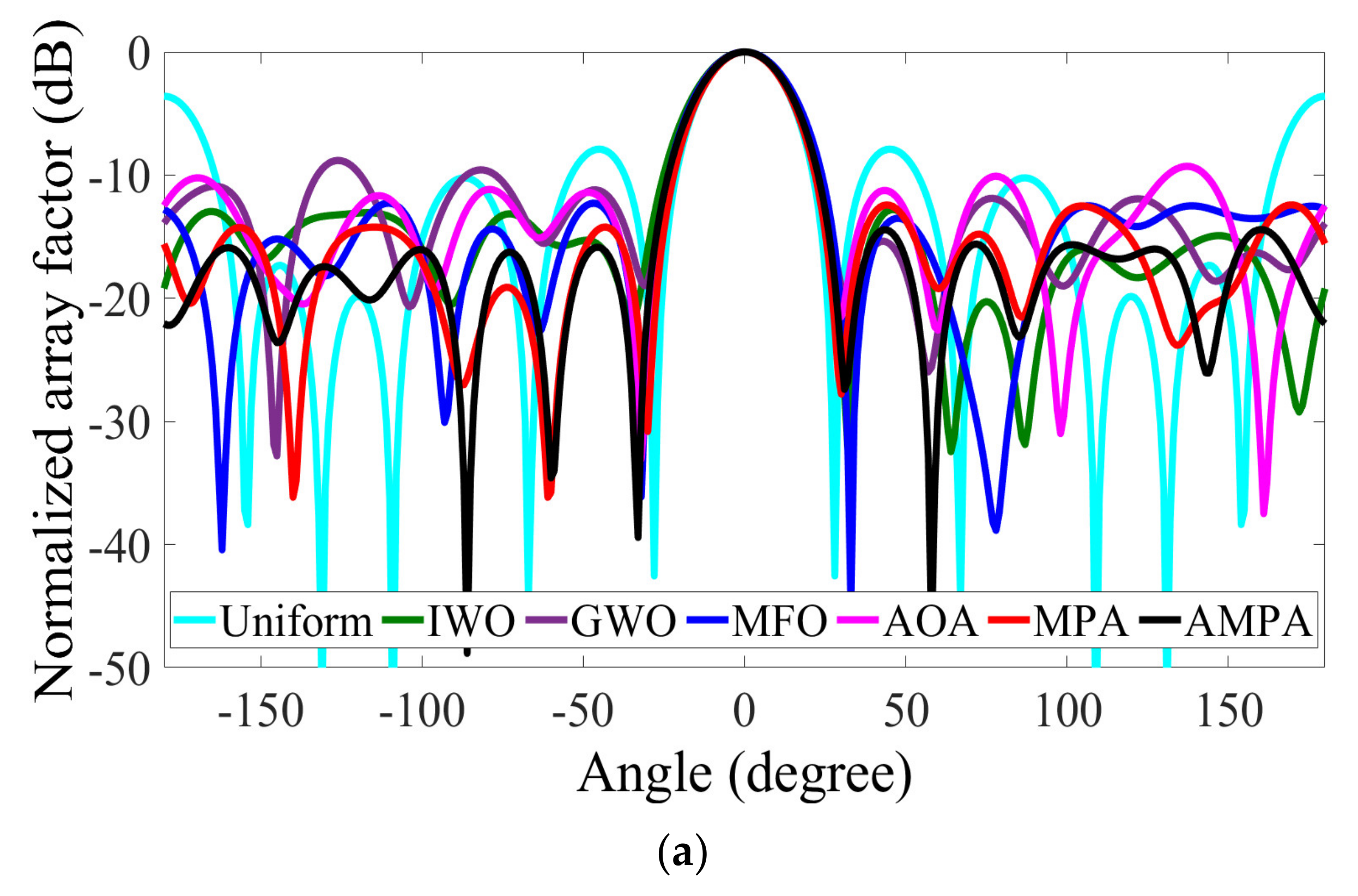
4.2.1. Beam Pattern Synthesis of 8-Element CAA
4.2.2. Beam Pattern Synthesis of 10-Element CAA
4.2.3. Beam Pattern Synthesis of 12-Element CAA
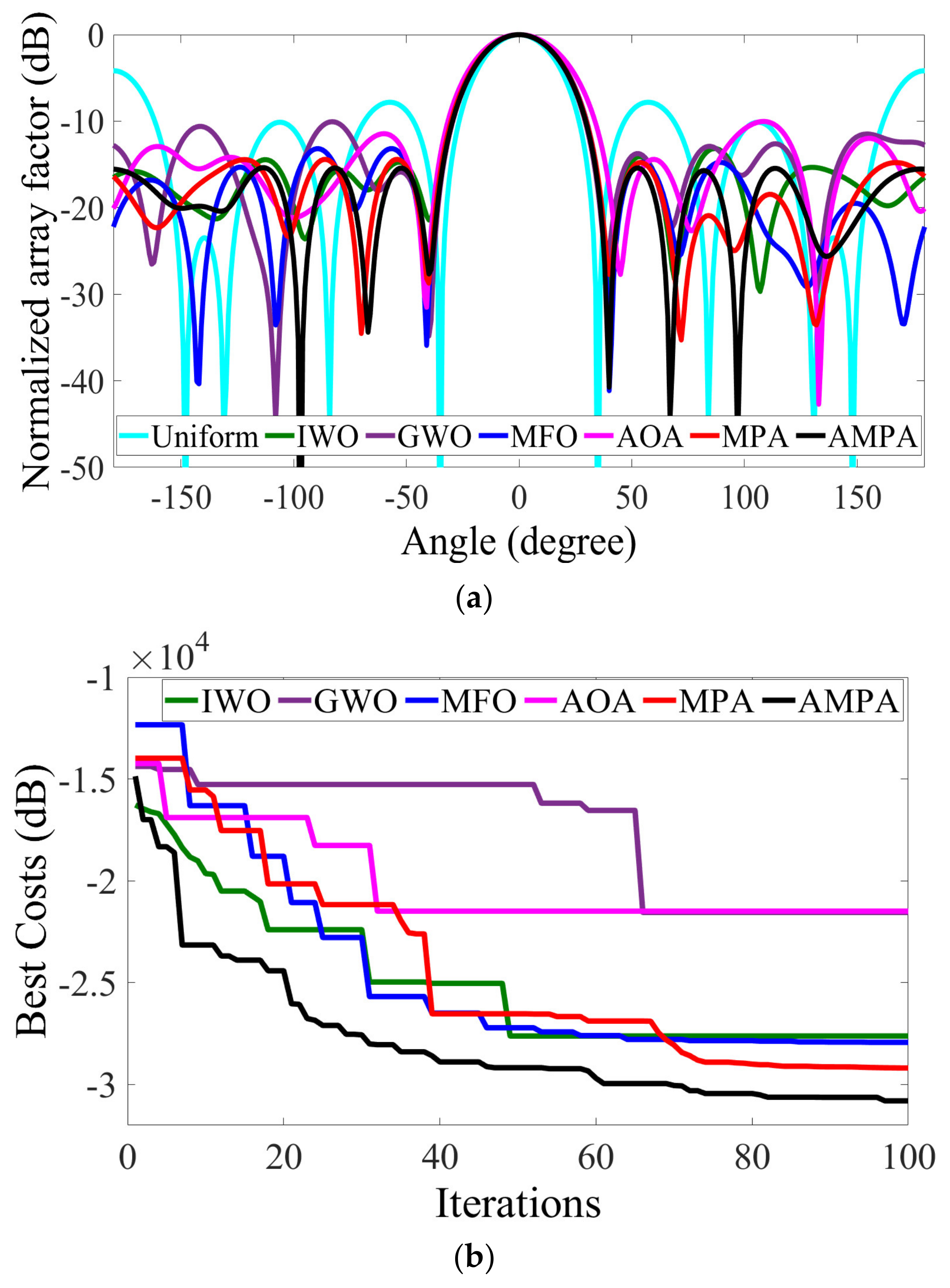
4.2.4. Beam Pattern Synthesis of 18-Element CAA
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Conflicts of Interest
References
- Kazema, T.; Michael, K. Investigation and analysis of the effects of geometry orientation of array antenna on directivity for wire-less communication. Cogent Eng. 2016, 3, 1232330. [Google Scholar] [CrossRef]
- Rahman, S.U.; Cao, Q.; Ahmed, M.M.; Khalil, H. Analysis of linear antenna array for minimum side lobe level, half power beamwidth, and nulls control using PSO. J. Microw. Optoelectron. Electromagn. Appl. 2017, 16, 577–591. [Google Scholar] [CrossRef]
- Cheng, Y.F.; Ding, X.; Shao, W.; Liao, C. A High-Gain Sparse Phased Array with Wide-Angle Scanning Performance and Low Sidelobe Levels. IEEE Access 2019, 7, 31151–31158. [Google Scholar] [CrossRef]
- Shihab, M.; Najjar, Y.; Dib, N.; Khodier, M. Design of non-uniform circular antenna arrays using particle swarm optimization. J. Electr. Eng. 2008, 59, 216–220. [Google Scholar]
- Almagboul, M.A.; Shu, F.; Qian, Y.; Zhou, X.; Wang, J.; Hu, J. Atom search optimization algorithm based hybrid antenna array receive beamforming to control sidelobe level and steering the null. AEU-Int. J. Electron. Commun. 2019, 111, 152854. [Google Scholar] [CrossRef]
- Taser, A.E.; Guney, K.; Kurt, E. Circular antenna array synthesis using multiverse optimizer. Int. J. Antennas Propag. 2020, 2020, 3149826. [Google Scholar] [CrossRef]
- Owoola, E.O.; Xia, K.; Wang, T.; Umar, A.; Akindele, R.G. Pattern Synthesis of Uniform and Sparse Linear Antenna Array Using Mayfly Algorithm. IEEE Access 2021, 9, 77954–77975. [Google Scholar] [CrossRef]
- Zheng, T.; Liu, Y.; Sun, G.; Liang, S.; Han, J.; Ju, Q.; Li, S. Joint sidelobe suppression and nulls control of large-scale linear antenna array using particle swarm optimization with global search and population mutation. Int. J. Numer. Model. Electron. Netw. Devices Fields 2020, 33, e2710. [Google Scholar] [CrossRef]
- Zheng, T.; Liu, Y.; Sun, G.; Zhang, L.; Liang, S.; Wang, A.; Zhou, X. IWORMLF: Improved Invasive Weed Optimization With Random Mutation and Lévy Flight for Beam Pattern Optimizations of Linear and Circular Antenna Arrays. IEEE Access 2020, 8, 19460–19478. [Google Scholar] [CrossRef]
- Shen, H.O.; Wang, B.H.; Li, L.J. Effective approach for pattern synthesis of sparse reconfigurable antenna arrays with exact pattern matching. IET Microw. Antennas Propag. 2016, 10, 748–755. [Google Scholar] [CrossRef]
- Liang, L.; Sun, J.; Li, H.; Liu, J.; Jiang, Y.; Zhou, J. Research on Side Lobe Suppression of Time-Modulated Sparse Linear Array Based on Particle Swarm Optimization. Int. J. Antennas Propag. 2019, 2019, 7130106. [Google Scholar] [CrossRef] [Green Version]
- Das, A.; Mandal, D.; Kar, R. An optimal circular antenna array design considering the mutual coupling employing ant lion optimization. Int. J. Microw. Wirel. Technol. 2021, 13, 164–172. [Google Scholar] [CrossRef]
- Oraizi, H.; Bahreini, B. A comparison among circular, rectangular and bee-hived array geometries using the invasive weed optimization algorithm. In Proceedings of the 2016 16th Mediterranean Microwave Symposium (MMS), Abu Dhabi, United Arab Emirates, 14–16 November 2016; pp. 16–19. [Google Scholar]
- Basak, A.; Pal, S.; Das, S.; Abraham, A.; Snasel, V. A modified invasive weed optimization algorithm for time-modulated linear antenna array synthesis. In Proceedings of the 2010 IEEE World Congress on Computational Intelligence, WCCI 2010-2010 IEEE Congress on Evolutionary Computation, Barcelona, Spain, 18–23 July 2010; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar]
- Jang, C.H.; Hu, F.; He, F.; Wu, L. A Novel Circular Array Structure and Particle Swarm Optimization in Aperture Synthesis Radiometers. IEEE Antennas Wirel. Propag. Lett. 2015, 14, 1758–1761. [Google Scholar] [CrossRef]
- Hosseini, Z.; Jafarian, A. A Hybrid Algorithm based on Invasive Weed Optimization and Particle Swarm Optimization for Global Optimization. Int. J. Adv. Comput. Sci. Appl. 2016, 7, 295–303. [Google Scholar] [CrossRef] [Green Version]
- Mahto, S.K.; Choubey, A. A novel hybrid IWO/WDO algorithm for nulling pattern synthesis of uniformly spaced linear and non-uniform circular array antenna. AEU-Int. J. Electron. Commun. 2016, 70, 750–756. [Google Scholar] [CrossRef]
- Sun, G.; Liu, Y.; Liang, S.; Wang, A.; Zhang, Y. Beam pattern design of circular antenna array via efficient biogeography-based optimization. AEU-Int. J. Electron. Commun. 2017, 79, 275–285. [Google Scholar] [CrossRef]
- Li, J.; Ren, S.; Guo, C. Synthesis of Sparse Arrays Based On CIGA (Convex Improved Genetic Algorithm). J. Microw. Optoelectron. Electromagn. Appl. 2020, 19, 444–456. [Google Scholar] [CrossRef]
- Al-Sadoon, M.; Abd-Alhameed, R.A.; Elfergani, I.T.E.; Noras, J.M.; Rodriguez, J.; Jones, S.M.R. Weight Optimization for Adaptive Antenna Arrays Using LMS and SMI Algorithms. WSEAS Trans. Commun. 2016, 15, 206–214. [Google Scholar]
- Wang, R.Q.; Jiao, Y.C. Synthesis of Sparse Linear Arrays With Reduced Excitation Control Numbers Using a Hybrid Cuckoo Search Algorithm With Convex Programming. IEEE Antennas Wirel. Propag. Lett. 2020, 19, 428–432. [Google Scholar] [CrossRef]
- Wei, W.Y.; Shi, Y.; Yang, J.X.; Meng, H.X. Artificial neural network and convex optimization enable antenna array design. Int. J. RF Microw. Comput.-Aided Eng. 2021, 31, e22593. [Google Scholar] [CrossRef]
- Zhang, R.; Zhang, Y.; Sun, J.; Li, Q. Pattern synthesis of linear antenna array using improved differential evolution algorithm with sps framework. Sensors 2020, 20, 5158. [Google Scholar] [CrossRef]
- Saxena, P.; Kothari, A. Optimal Pattern Synthesis of Linear Antenna Array Using Grey Wolf Optimization Algorithm. Int. J. Antennas Propag. 2016, 2016, 1205970. [Google Scholar] [CrossRef] [Green Version]
- Lakhlef, N.; Oudira, H.; Dumond, C. Optimal pattern synthesis of linear antenna arrays using modified grey wolf optimization algorithm. Instrum. Mes. Metrol. 2020, 19, 255–261. [Google Scholar] [CrossRef]
- Goudos, S.K.; Yioultsis, T.V.; Boursianis, A.D.; Psannis, K.E.; Siakavara, K. Application of New hybrid jaya grey Wolf optimizer to antenna design for 5G communications systems. IEEE Access 2019, 7, 71061–71071. [Google Scholar] [CrossRef]
- Faramarzi, A.; Heidarinejad, M.; Mirjalili, S.; Gandomi, A.H. Marine Predators Algorithm: A nature-inspired metaheuristic. Expert Syst. Appl. 2020, 152, 113377. [Google Scholar] [CrossRef]
- Chen, X.; Qi, X.; Wang, Z.; Cui, C.; Wu, B.; Yang, Y. Fault diagnosis of rolling bearing using marine predators algorithm-based support vector machine and topology learning and out-of-sample embedding. Measurement 2021, 176, 109116. [Google Scholar] [CrossRef]
- Ramezani, M.; Bahmanyar, D.; Razmjooy, N. A New Improved Model of Marine Predator Algorithm for Optimization Problems. Arab. J. Sci. Eng. 2021, 46, 8803–8826. [Google Scholar] [CrossRef]
- Chen, G.; Xiao, Y.; Long, F.; Hu, X.; Long, H. An Improved Marine Predators Algorithm for Short-term Hydrothermal Scheduling. IAENG Int. J. Appl. Math. 2021, 51, 936–949. [Google Scholar]
- Bouchekara, H. Solution of the optimal power flow problem considering security constraints using an improved chaotic electromagnetic field optimization algorithm. Neural Comput. Appl. 2020, 32, 2683–2703. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Parameters | Values |
|---|---|---|
| AMPA | b1 and b2 | 1.7 |
| FADs and C | [0.2, 0.4] | |
| MPA | FADs and C | [0.2, 0.5] |
| AOA | α and μ | [5, 0.499] |
| MFO | Spiral constant | 1 |
| Convergence constant | [−1, −2] | |
| Random factor | [−1, 1] | |
| IWO | Exponent | 2 |
| Minimum and maximum number of seeds | [0, 5] | |
| Initial and final SD | [0.01, 0.1] | |
| GWO | Control parameter | [2, 0] |
| Algorithm | Peak SLL (dB) | FNBW (°) | Circumference (λ) | CPU Time (s) |
|---|---|---|---|---|
| Uniform | −4.1702 | 70.00 | 3.75 | 0.00 |
| IWO | −13.1653 | 80.00 | 4.49 | 0.34 |
| GWO | −10.0628 | 80.00 | 4.45 | 0.39 |
| MFO | −13.1784 | 81.00 | 4.41 | 0.38 |
| AOA | −10.0376 | 86.00 | 4.40 | 0.38 |
| MPA | −14.4152 | 80.00 | 4.52 | 0.66 |
| AMPA | −15.3811 | 80.00 | 4.55 | 0.77 |
| Element | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
|---|---|---|---|---|---|---|---|---|
| I | 0.8111 | 0.4236 | 0.9577 | 0.9793 | 0.0435 | 0.3654 | 0.8533 | 0.0962 |
| d (λ) | 0.3137 | 0.8028 | 0.8627 | 0.6000 | 0.3684 | 0.4822 | 0.7883 | 0.3272 |
| Algorithm | Peak SLL (dB) | FNBW (°) | Circumference (λ) | CPU Time (s) |
|---|---|---|---|---|
| Uniform | −3.5975 | 56.00 | 4.75 | 0.00 |
| IWO | −12.7904 | 67.00 | 5.87 | 0.59 |
| GWO | −8.8086 | 63.00 | 5.97 | 0.47 |
| MFO | −12.2772 | 65.00 | 5.83 | 0.45 |
| AOA | −9.2885 | 62.00 | 5.75 | 0.49 |
| MPA | −12.4175 | 60.00 | 6.00 | 0.85 |
| AMPA | −14.4185 | 64.00 | 6.00 | 0.87 |
| Element | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| I | 0.9540 | 0.4040 | 0.3468 | 0.9940 | 0.9864 | 0.3329 | 0.5148 | 0.1317 | 0.9996 | 0.3978 |
| d (λ) | 0.2920 | 0.9990 | 0.4042 | 0.9990 | 0.5748 | 0.9509 | 0.5501 | 0.4142 | 0.4803 | 0.3313 |
| Algorithm | Peak SLL (dB) | FNBW (°) | Circumference (λ) | CPU Time (s) |
|---|---|---|---|---|
| Uniform | −7.165 | 46.00 | 5.75 | 0.00 |
| IWO | −13.0541 | 48.00 | 7.23 | 0.64 |
| GWO | −9.34022 | 44.00 | 7.66 | 0.53 |
| MFO | −11.6163 | 35.00 | 9.35 | 0.47 |
| AOA | −10.3039 | 57.00 | 5.97 | 0.53 |
| MPA | −13.5153 | 47.00 | 7.34 | 1.00 |
| AMPA | −14.9518 | 41.00 | 9.15 | 1.07 |
| Element | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|
| I | 0.9993 | 0.7689 | 0.0865 | 0.6451 | 0.9850 | 0.9998 |
| d (λ) | 0.6822 | 0.9854 | 0.9781 | 0.9981 | 0.6357 | 0.4636 |
| Element | 7 | 8 | 9 | 10 | 11 | 12 |
| I | 0.8172 | 0.8431 | 0.0100 | 0.8646 | 0.5589 | 0.9988 |
| d (λ) | 0.4424 | 0.9990 | 0.3813 | 0.9463 | 0.9515 | 0.6832 |
| Algorithm | Peak SLL (dB) | FNBW (°) | Circumference (λ) | CPU Time (s) |
|---|---|---|---|---|
| Uniform | −7.9169 | 30.00 | 8.75 | 0.00 |
| IWO | −13.5950 | 40.00 | 9.15 | 0.68 |
| GWO | −9.6220 | 38.00 | 9.17 | 0.70 |
| MFO | −12.7945 | 37.00 | 9.07 | 0.85 |
| AOA | −10.6677 | 36.00 | 9.02 | 0.66 |
| MPA | −14.2367 | 39.00 | 9.16 | 1.41 |
| AMPA | −18.1481 | 37.00 | 10.69 | 1.46 |
| Element | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
|---|---|---|---|---|---|---|---|---|---|
| I | 0.9215 | 0.6189 | 0.5579 | 0.3879 | 0.0850 | 0.8766 | 0.8956 | 0.6880 | 0.9204 |
| d (λ) | 0.3028 | 0.4996 | 0.9128 | 0.6433 | 0.7766 | 0.5094 | 0.9317 | 0.4235 | 0.2744 |
| Element | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 |
| I | 0.8215 | 0.7992 | 0.6829 | 0.7112 | 0.3970 | 0.4189 | 0.3077 | 0.8632 | 0.7655 |
| d (λ) | 0.3560 | 0.4245 | 0.9459 | 0.6335 | 0.7798 | 0.5515 | 0.9937 | 0.4096 | 0.3166 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Owoola, E.O.; Xia, K.; Ogunjo, S.; Mukase, S.; Mohamed, A. Advanced Marine Predator Algorithm for Circular Antenna Array Pattern Synthesis. Sensors 2022, 22, 5779. https://doi.org/10.3390/s22155779
Owoola EO, Xia K, Ogunjo S, Mukase S, Mohamed A. Advanced Marine Predator Algorithm for Circular Antenna Array Pattern Synthesis. Sensors. 2022; 22(15):5779. https://doi.org/10.3390/s22155779
Chicago/Turabian StyleOwoola, Eunice Oluwabunmi, Kewen Xia, Samuel Ogunjo, Sandrine Mukase, and Aadel Mohamed. 2022. "Advanced Marine Predator Algorithm for Circular Antenna Array Pattern Synthesis" Sensors 22, no. 15: 5779. https://doi.org/10.3390/s22155779