1. Introduction
The potato is the fourth largest food crop in the world [
1] and is grown in more than 150 countries and regions. As of 2020, potatoes will be grown on about 19.59 million hectares, with Asia and Europe as the central potato-growing regions. The potato provides nutrition for more than one billion people worldwide and is an essential guarantor of food security [
2]. In China, the potato-planting area is stable, at more than 80 million mu, with an annual output of 100 million tons of fresh potatoes [
3]. Shape is one of the most important indicators of the external quality of potatoes [
4]. Regularly shaped potatoes are preferred by consumers, have stronger sales appeal, and play an important role in processing chips and fries [
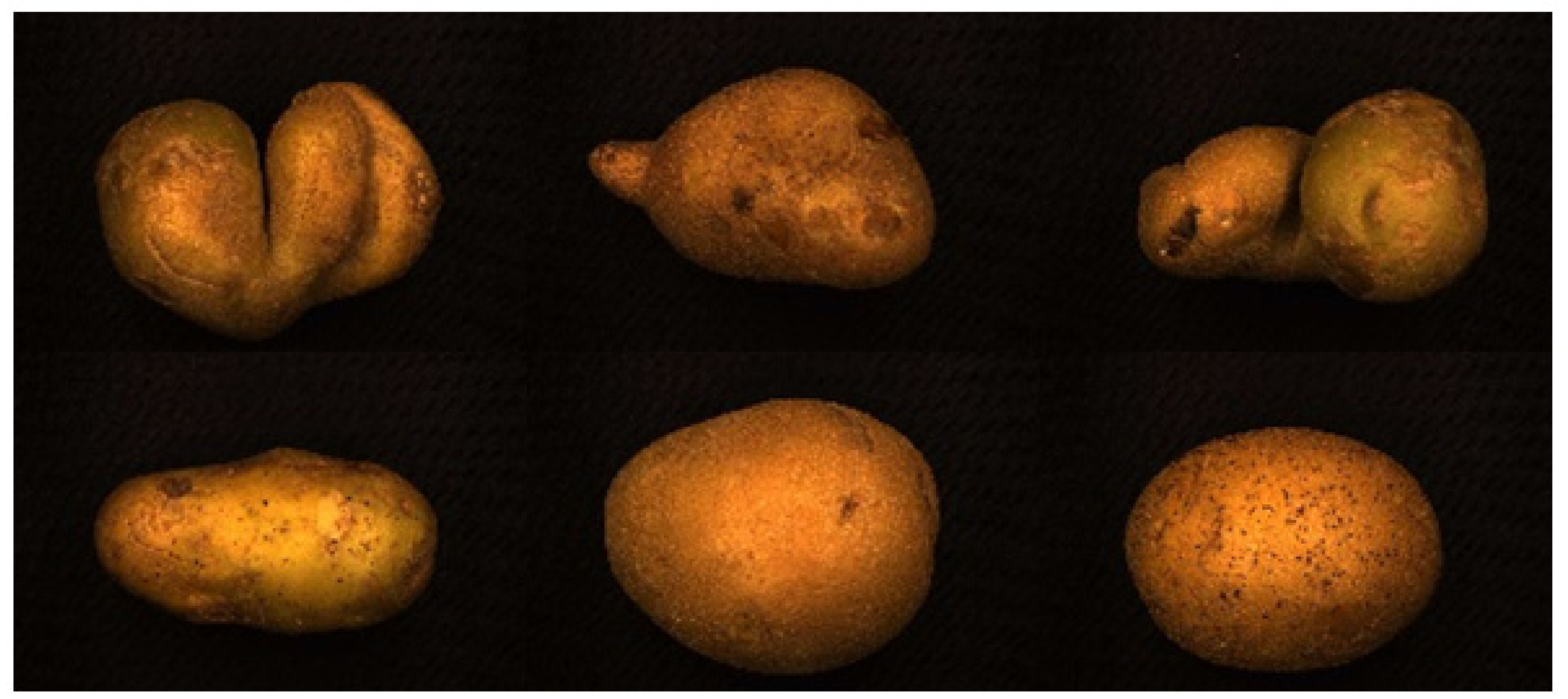
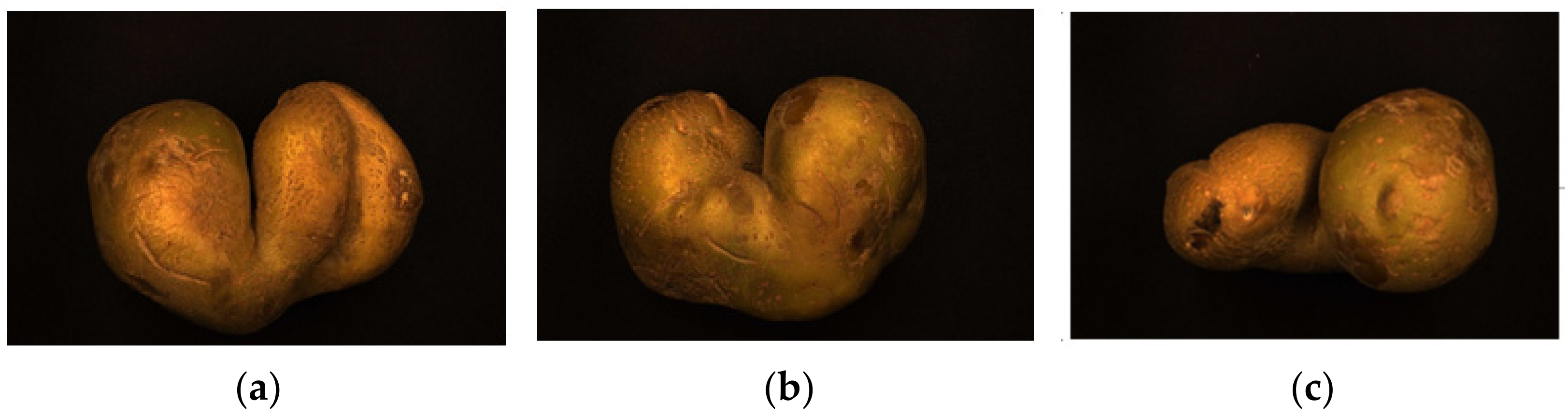
5]. When part of the potato grows under hot and dry conditions, the shape of the potato is changed, resulting in irregular potatoes. Irregular potatoes seriously affect pricing, significantly reducing the economic benefits of the crop [
6]. With the increasing human demand for direct potato consumption and food processing, the market demand for regular potatoes is also growing [
7]. However, most irregular potatoes currently go directly to the market without being removed, which seriously affects consumers’ desire to buy, as well as the added value of potatoes [
8]. Therefore, accurately identifying irregular potatoes can guarantee that they are appropriately discarded to prevent them from reaching the market, which is extremely important for the food production chain [
9].
Currently, the primary methods used for shape inspection are manual expert inspection and machine vision inspection [
10]. The traditional techniques for detection of irregular potatoes include subjective determination by the naked eye of a grading expert, which lacks a unified identification standard [
11,
12]. Crop shape detection based on machine vision mainly uses image processing, pattern recognition, machine learning, and deep learning technologies to analyze crop images, which can effectively identify the shapes of crops [
13]. Few studies have been conducted focusing on identification of irregular potatoes, and most have focused on potato shape grading based on traditional image processing methods [
14,
15]. Wang et al. [
16] extracted potatoes’ contour area and external rectangle and used principal component analysis (PCA) to analyze the relationship between image feature parameters and potato shape. Zheng et al. [
17] used the normalized radius sequence method to inspect irregular potatoes. Deng et al. [
18] estimated potato shape by calculating the ratio of potato contour length and the equivalent ellipse perimeter. Zhou et al. [
19] determined potato shape grading standards based on the ratio of the maximum transverse diameter to the maximum longitudinal diameter of the potato. Lopez-Juarez [
20] proposed a boundary object function to detect the shape of potatoes. Tao et al. [
21] proposed a shape separation method based on Fourier transform for automatic inspection of potato shapes. Cui et al. [
22] proposed a potato shape recognition method based on Fourier descriptors of moment features of boundary points, which classifies potatoes shapes ellipse, circle, or irregular. Kong et al. [
23] used the six invariant moments of the top view image of potatoes as grading features and achieved grading using a BP neural network. ElMasry et al. [
4] extracted two shape features and four Fourier shape descriptors based on linear discriminant analysis (LDA) to efficiently identify the shapes of potatoes. Aziz and Abbaspour-Gilandeh [
24] proposed a method combining geometric parameters and Fourier descriptors to detect irregular potatoes, using PCA to select the seven most prominent features to complete the grading. Xu and Zhao [
25] proposed a potato shape-grading method combining principal component analysis and a support vector machine (PCA-SVM) algorithm to sort potato shapes with 11-dimensional feature vectors. Shen et al. [
26] extracted geometric characteristics, image wavelet moment, and fractal boundary dimensions as feature parameters and completed potato shape identification using a support vector machine (SVM) with an accuracy of 88.89%. Deep learning has developed rapidly in recent years and has been widely used in industry and agriculture [
27]. Deep learning has been successfully applied in agriculture [
28] and, recently, for potato defect detection. Marino et al. [
29] proposed a weakly supervised learning method to classify six defects in potatoes, using convolutional neural networks (CNN) for the classification task. Oppenheim et al. [
30] used a deep convolutional neural network trained on a potato defect dataset to classify potato tubers into five categories. Zhang et al. [
31] used the improved YoloV4 model to detect potato defects and achieved an average accuracy of 91.4% for potato defect identification.
Although these methods have achieved good inspection and grading results, they are subject to certain limitations. For example, shape classification based on simple geometric features cannot cope with the complex shape of irregular potatoes. Fourier shape descriptors work well for round and oval potatoes but not for complicated irregular potatoes and are susceptible to noise and local information interference, meaning they lack robustness. Invariant moments increase the computational effort, making them unsuitable for applications requiring real-time performance. Manually designed features are high in accuracy with respect to training sets but need to be redesigned if new irregular features appear. More importantly, existing high-accuracy shape detection methods use more than one feature, leading to a high dimensionality of the feature parameters and increasing the grading effort. Deep learning approaches require massive datasets and tedious and time-consuming data-labeling and training efforts. In practical industrial applications, deep learning also demands advanced hardware facilities, with considerable associated costs.
With the maturity and perfection of image processing and machine vision technology, as well as the development needs of precision agriculture, countries have begun to study the use of computer vision technology for the grading and inspection of agricultural products [
32]. Machine vision inspection has the advantages of economy, objectivity, and high index, which overcome the disadvantages of high labor costs, low efficiency, vague grading standards, and subjectivity of manual expert inspection. It has become a hot research topic in crop shape inspection [
33]. However, existing methods use high-dimensional feature parameters to accurately detect the complex variable shapes of irregular potatoes. It is still challenging to effectively and accurately describe the shape of potatoes using a minimal number of features [
34].
With this problem in mind, a method of irregular potato identification based on Hausdorff distance and IoU is proposed to achieve accurate identification of irregular potatoes with a minimum number of features. The contributions of this paper are as follows:
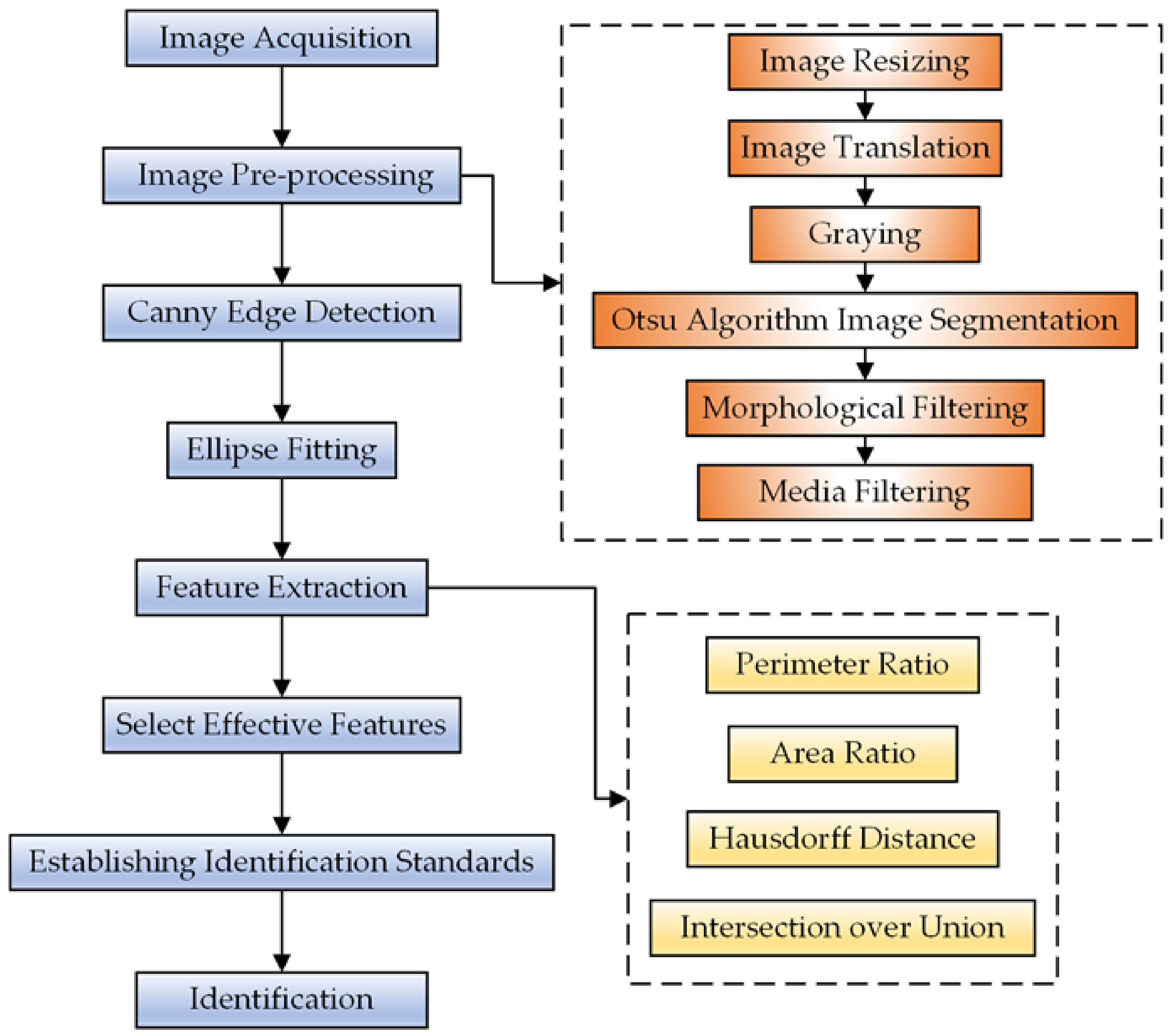
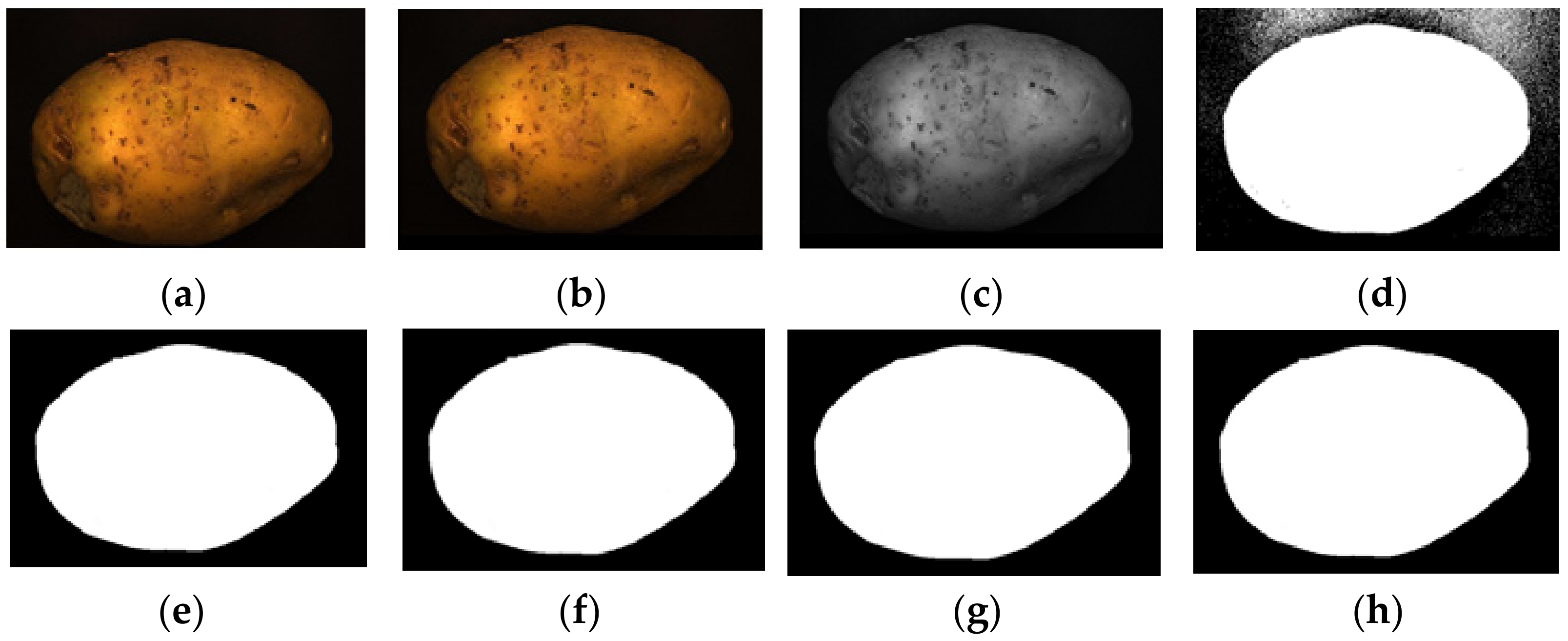
Construction of a dataset of potatoes: after resizing, translation, graying, segmentation, morphological filtering, and median filtering, a canny edge-detection operator is used to extract potato contours;
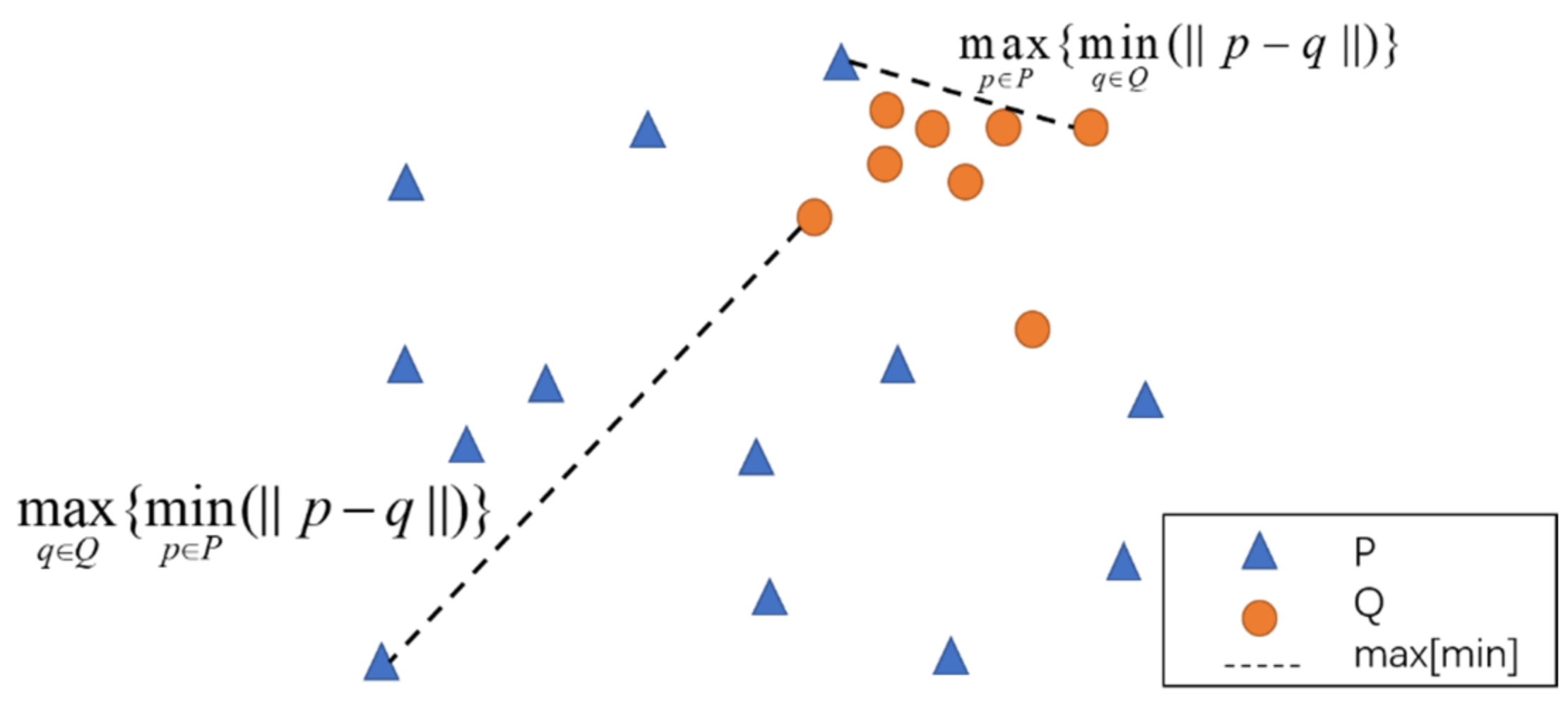
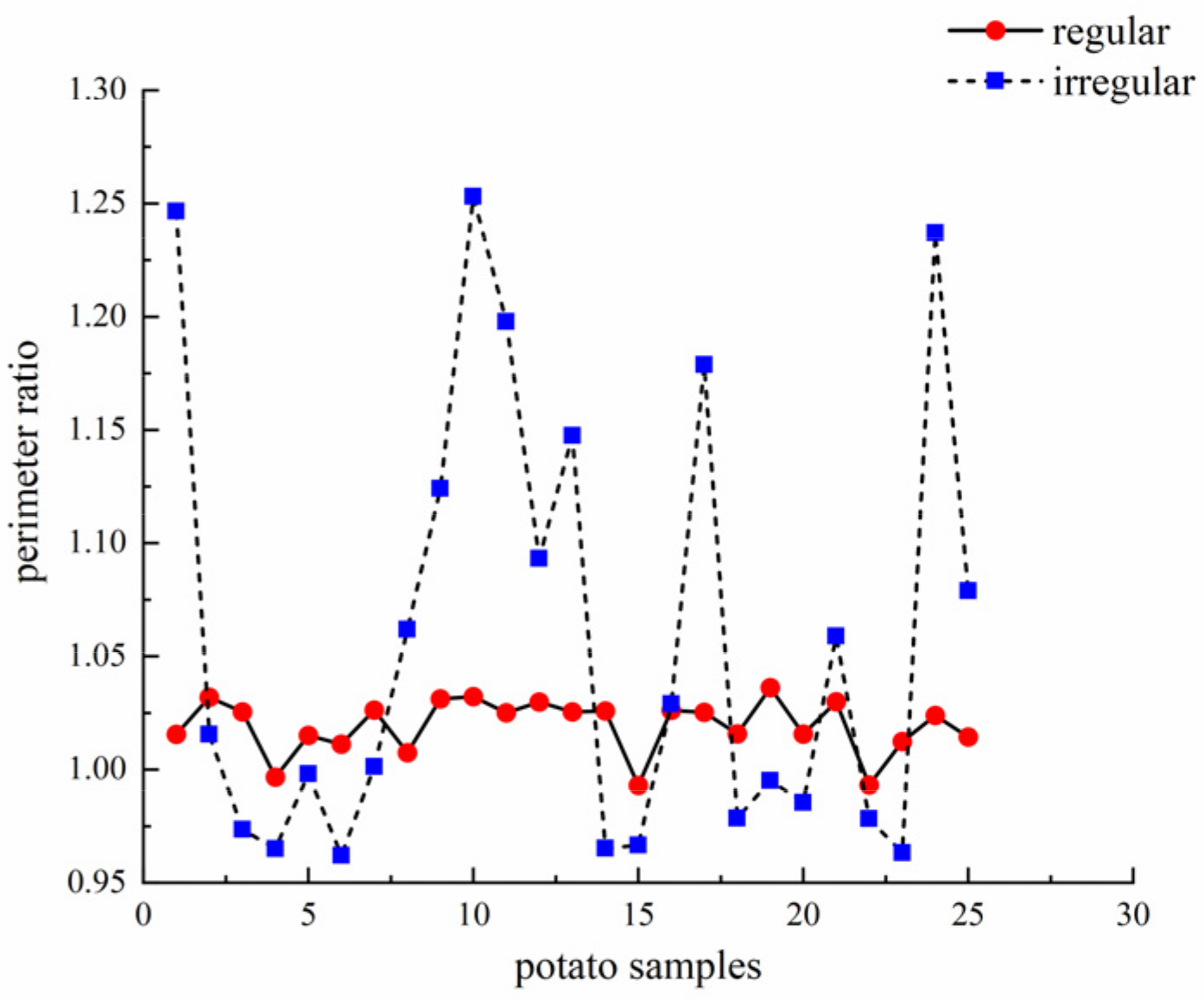
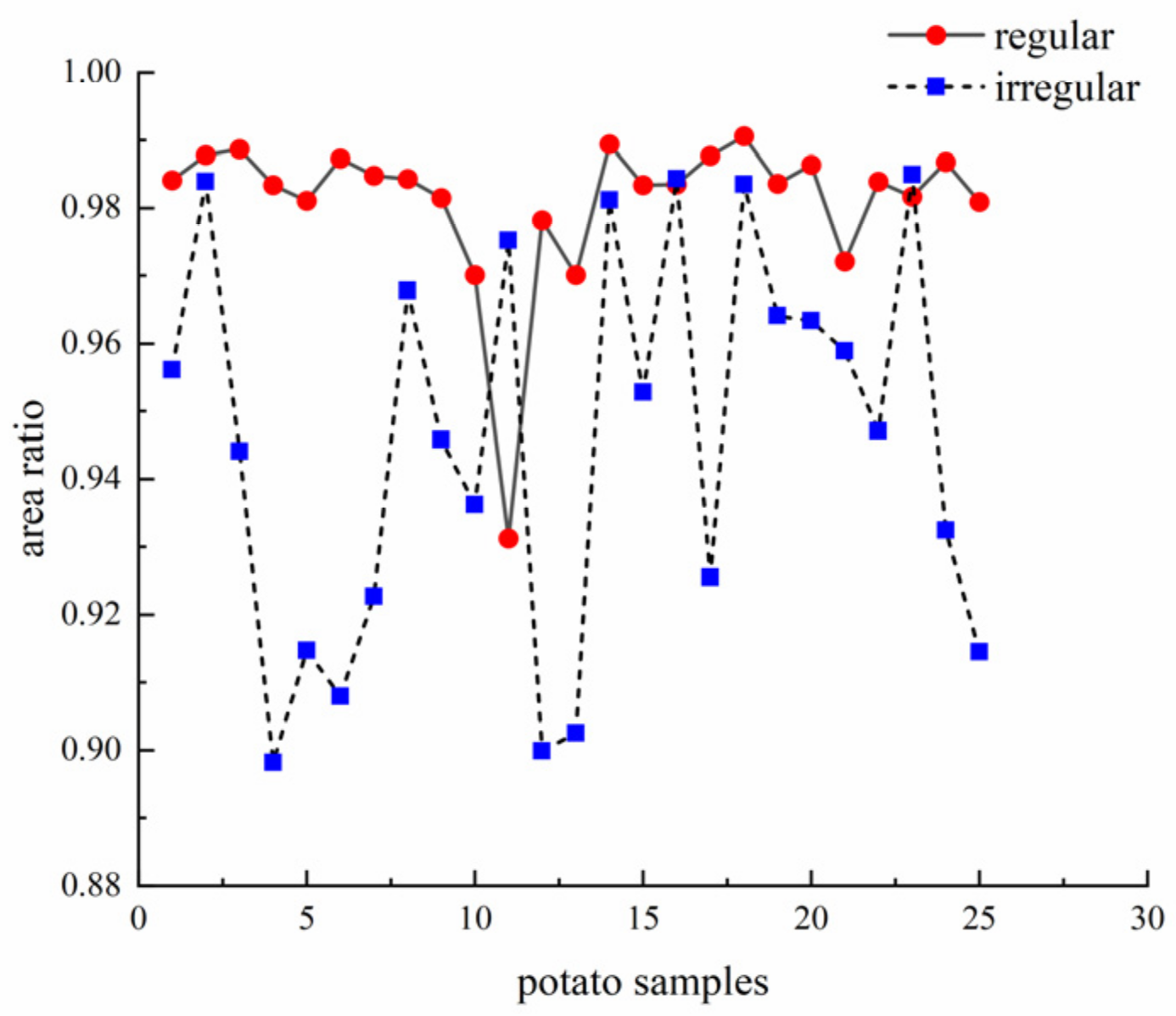
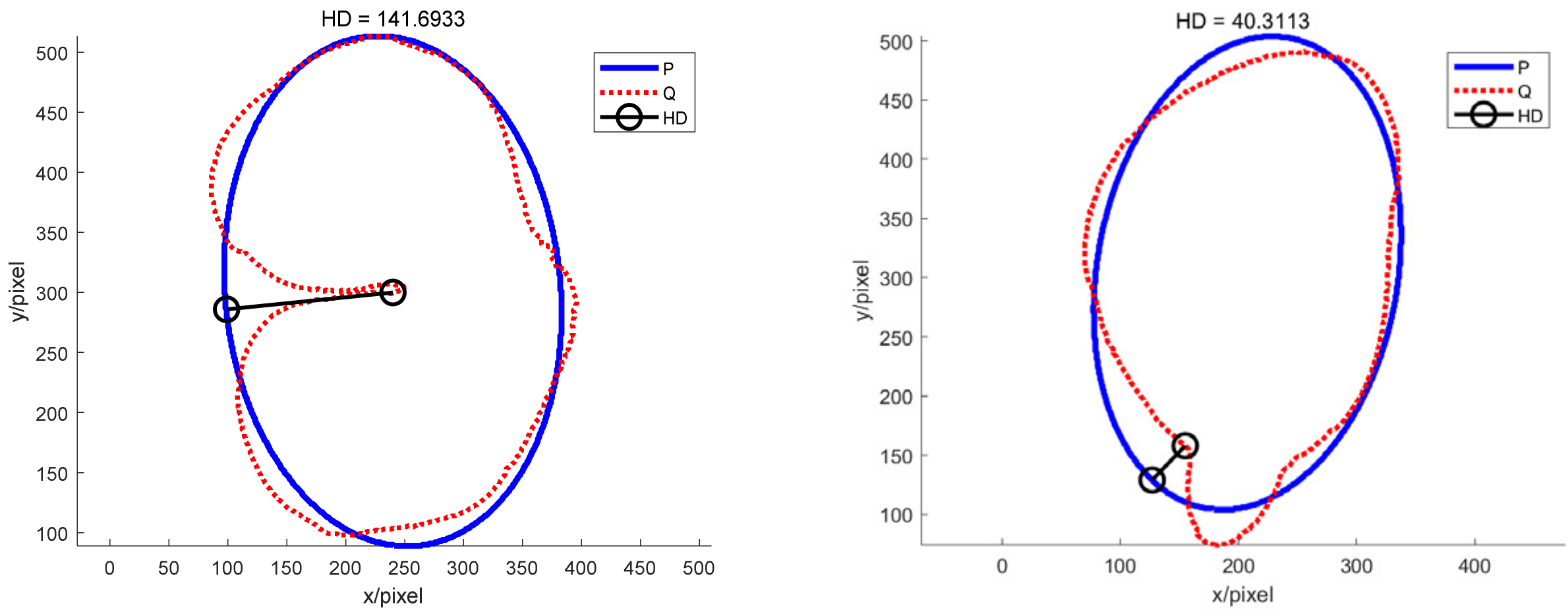
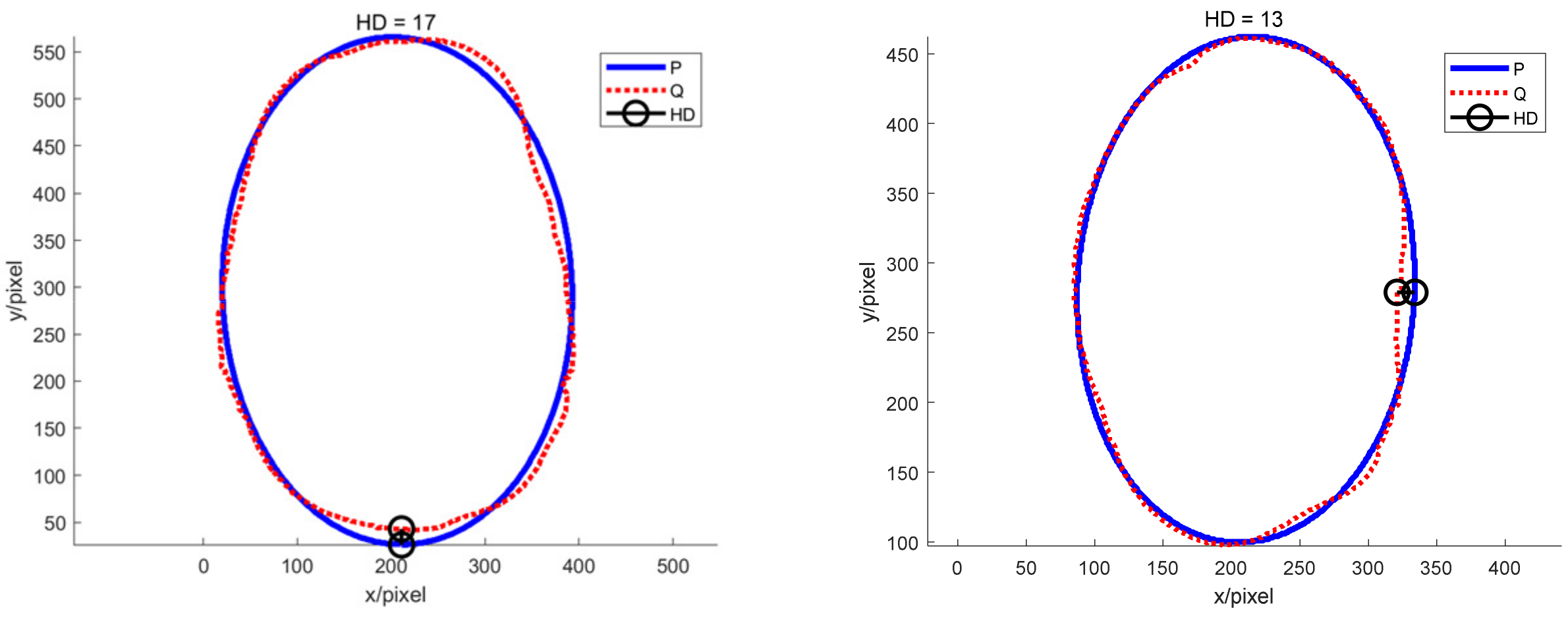
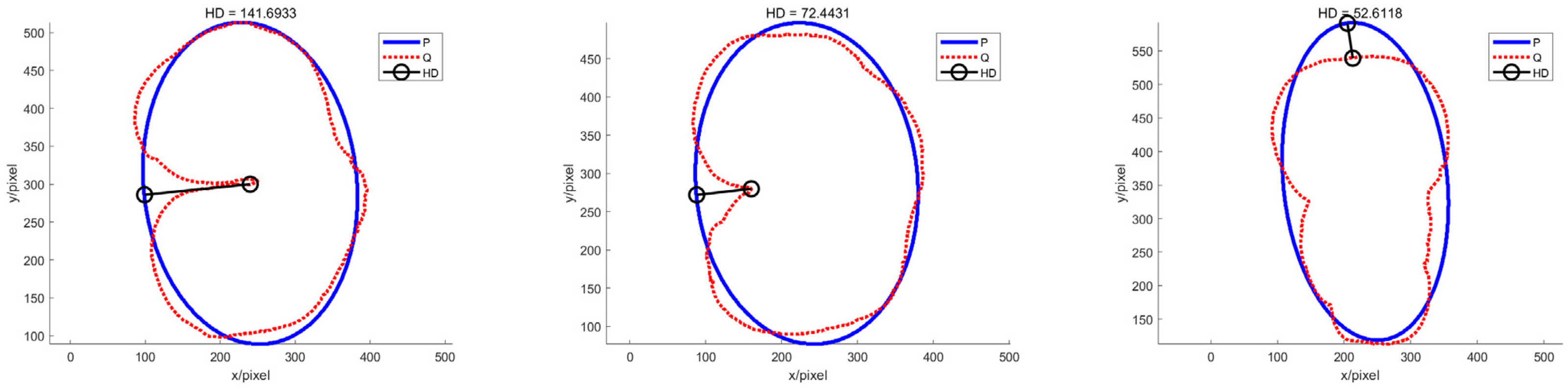
Using the least-squares method to fit the potato contour to an ellipse, the perimeter ratio, area ratio, Hausdorff distance, and IoU feature parameters are extracted;
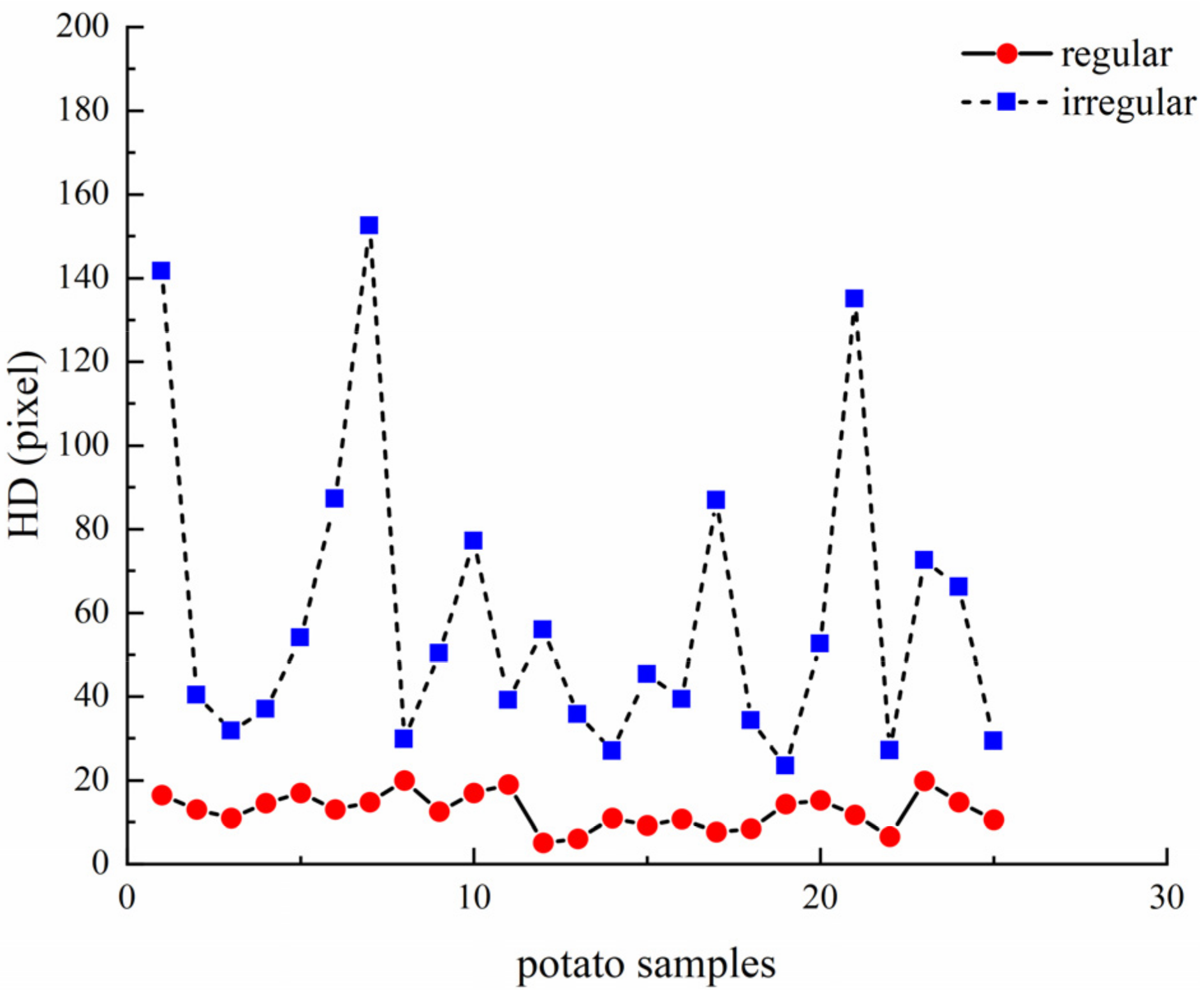
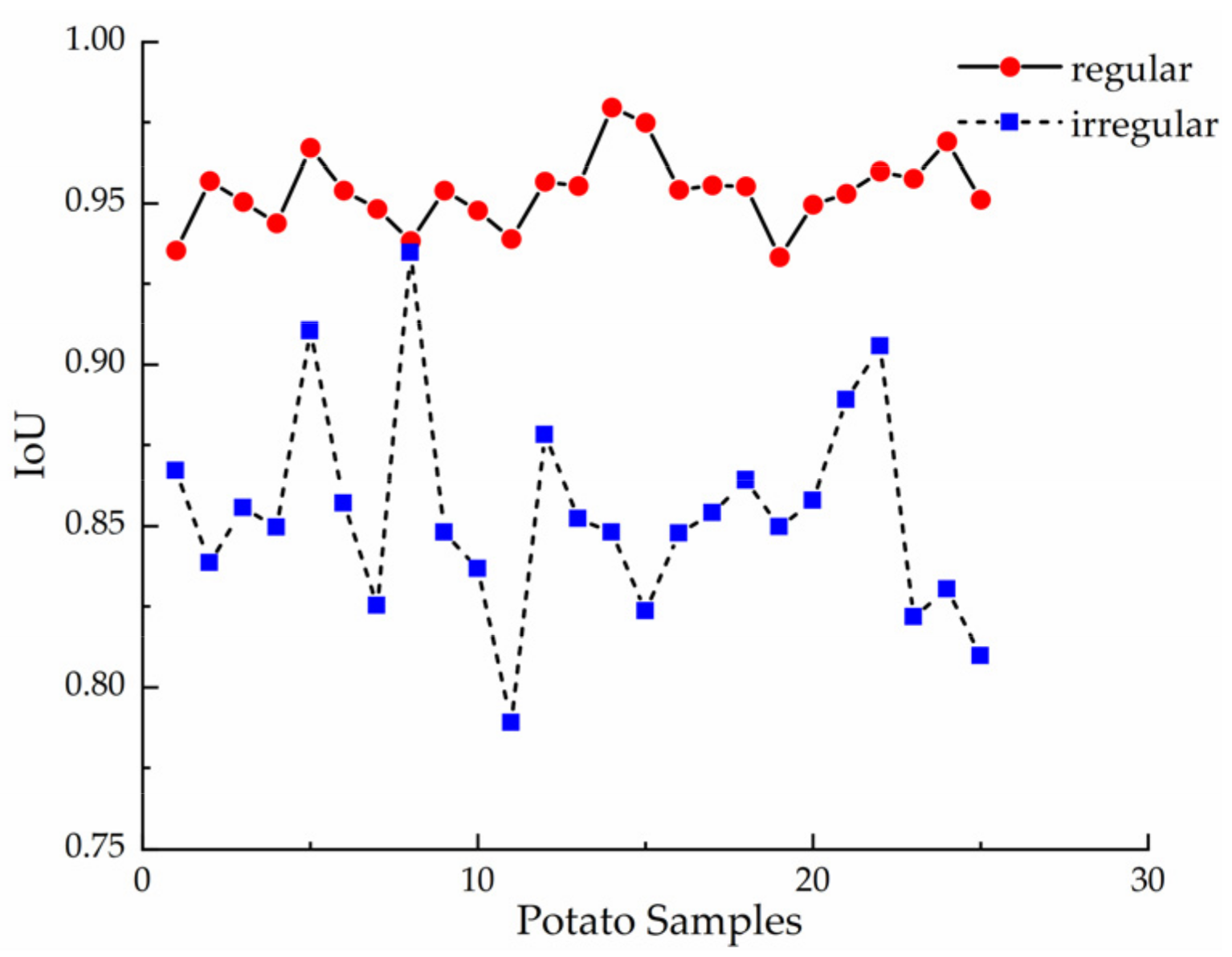
We analyze the characterization ability of perimeter ratio, area ratio, Hausdorff distance, and IoU. Experimental validation showed that the characterization ability of perimeter ratio and area ratio is inferior to that of Hausdorff distance and IoU. Therefore, Hausdorff distance and IoU are suitable feature parameters for identifying irregular potatoes;
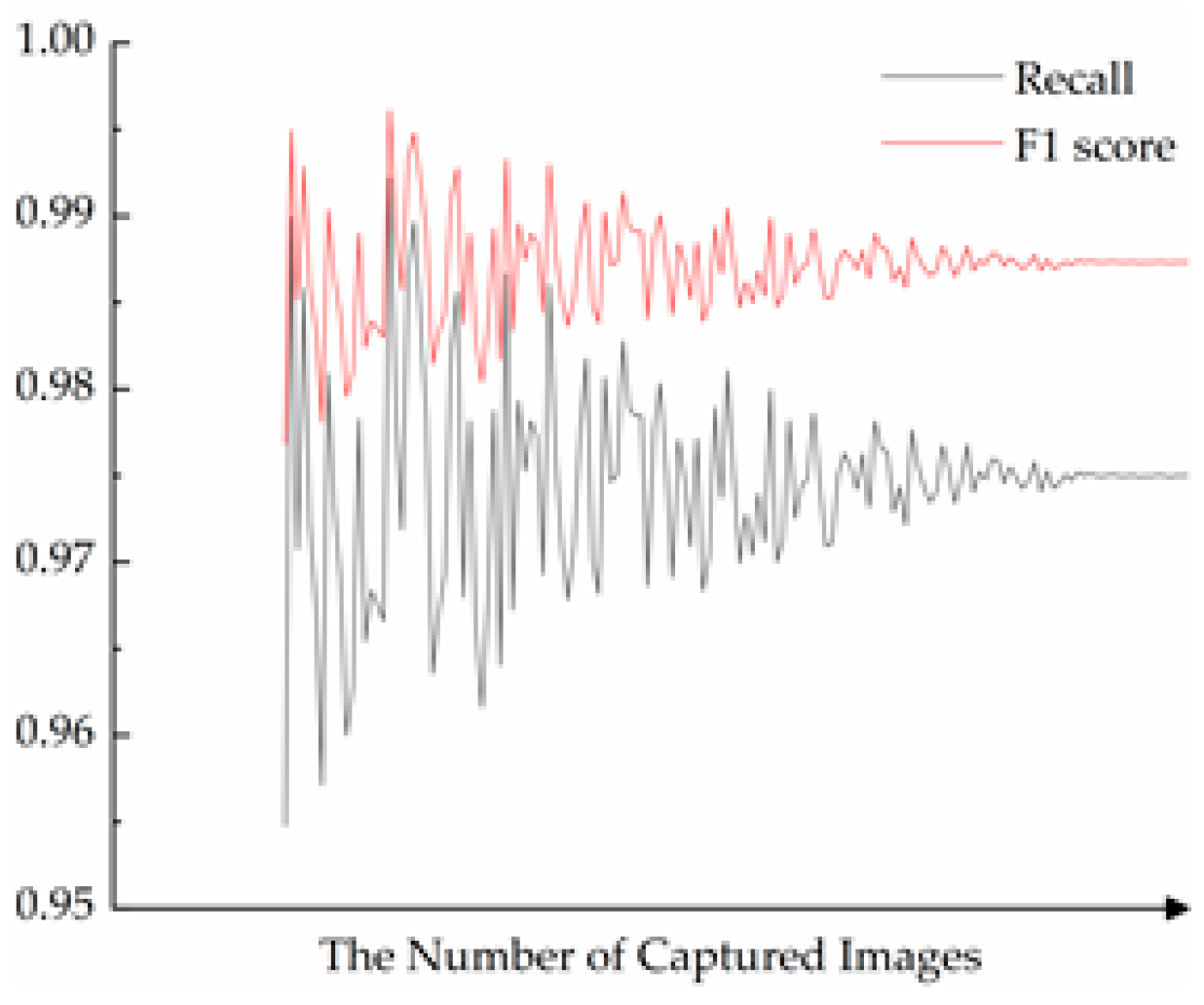
A suitable threshold value is determined to identify irregular potatoes. Furthermore, standards for identifying irregular potatoes are established. The experimental results show that the two proposed features have excellent recognition ability, with a maximum F1 score of 0.9796.
The remainder of this paper is organized as follows. In
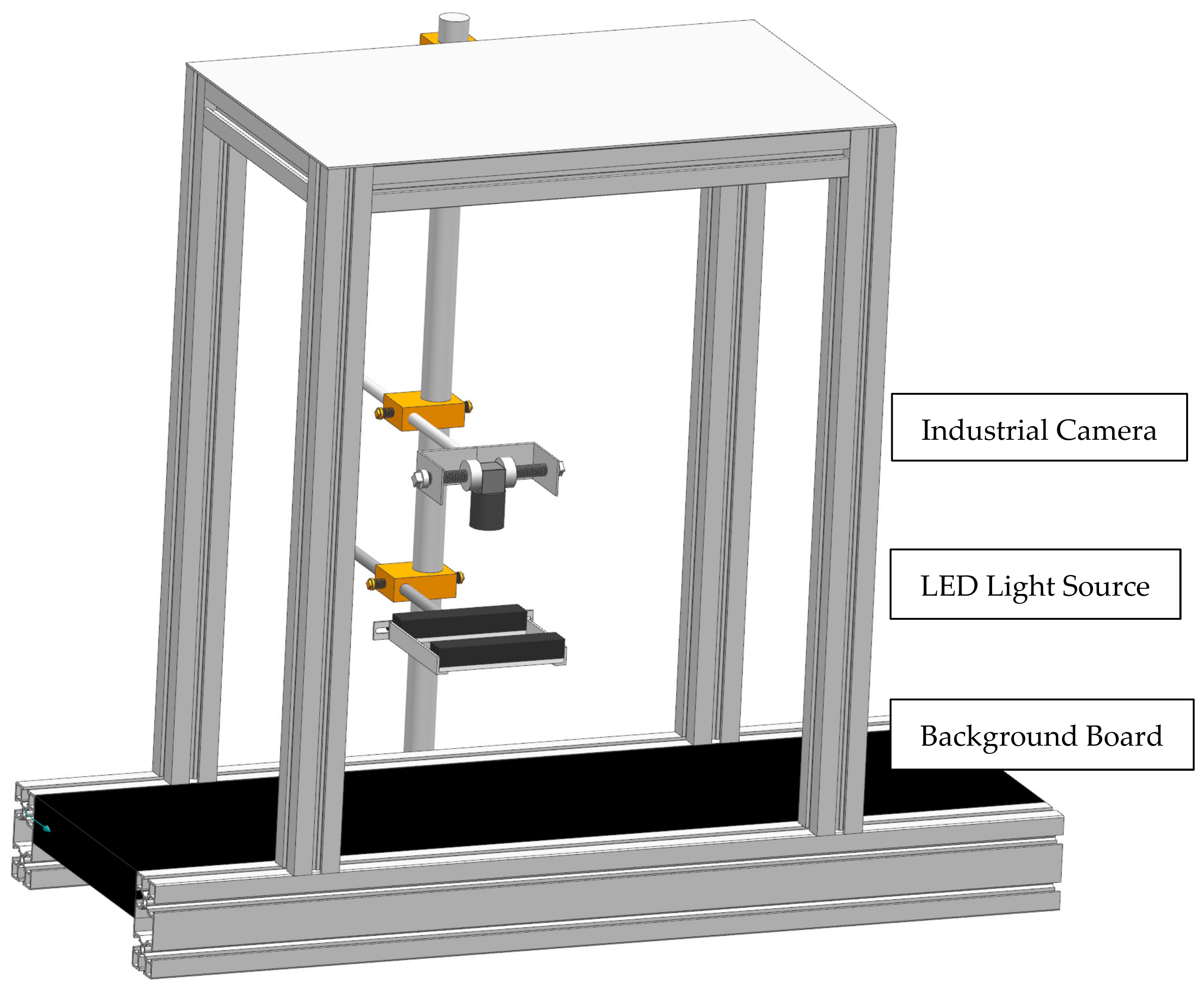
Section 2, we introduce the experimental sample and the vision acquisition device and details the algorithm’s overall flow. In
Section 3, we analyze the characterization ability of the four features, establish a standard for identifying irregular potatoes, and present the experimental results. In
Section 4, we discuss the problems encountered in execution of the algorithm and draw its advantages. In
Section 5, we present our conclusions.
5. Conclusions
We propose a new algorithm to identify irregular potatoes, achieving excellent performance, with a maximum F1 score of 0.9796, making it capable of meeting practical industrial needs. The potato contour is extracted by canny edge detection, and the contour is fitted to an ellipse using the least-squares method. Four feature descriptors, perimeter ratio, area ratio, Hausdorff distance, and IoU are proposed based on ellipse fitting. The experimental results show that the characterization ability of perimeter ratio and area ratio is inferior to that of Hausdorff distance and IoU. The proposed algorithm uses Hausdorff distance and IoU separately to identify irregular potatoes, significantly reducing the dimensionality of feature parameters and the computational complexity of the algorithm. More importantly, the algorithm proposed in this paper does not require a training process and can accurately identify irregular potatoes using only simple threshold segmentation. The algorithm proposed of this paper provides a theoretical basis and technical reference for detection of irregular potatoes. It can also be extended to detection of other irregular agricultural products, which is essential for promoting the appreciation and processing of farm products.
To ensure the robustness of the algorithm, the following factors are critical:
The potato image dataset was obtained under good lighting conditions in a laboratory. In the future, it will be a challenging task to acquire potato images with more complex lighting environments and backgrounds in order to build datasets with larger samples. In addition, potatoes present with a wide variety of surface defects. Therefore, exploration of efficient identification algorithms to detect a wider range of defects with the help of advanced computer vision technology will constitute a principal research task in the future.



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



























