
Technology for Position Correction of Satellite Precipitation and Contributions to Error Reduction—A Case of the ‘720’ Rainstorm in Henan, China


Abstract
:1. Introduction
2. Data and Methods
2.1. Data
2.1.1. Surface Rain Gauge Station
2.1.2. IMERG Precipitation Products
2.1.3. QPE Products of FY-4A
2.2. Methods
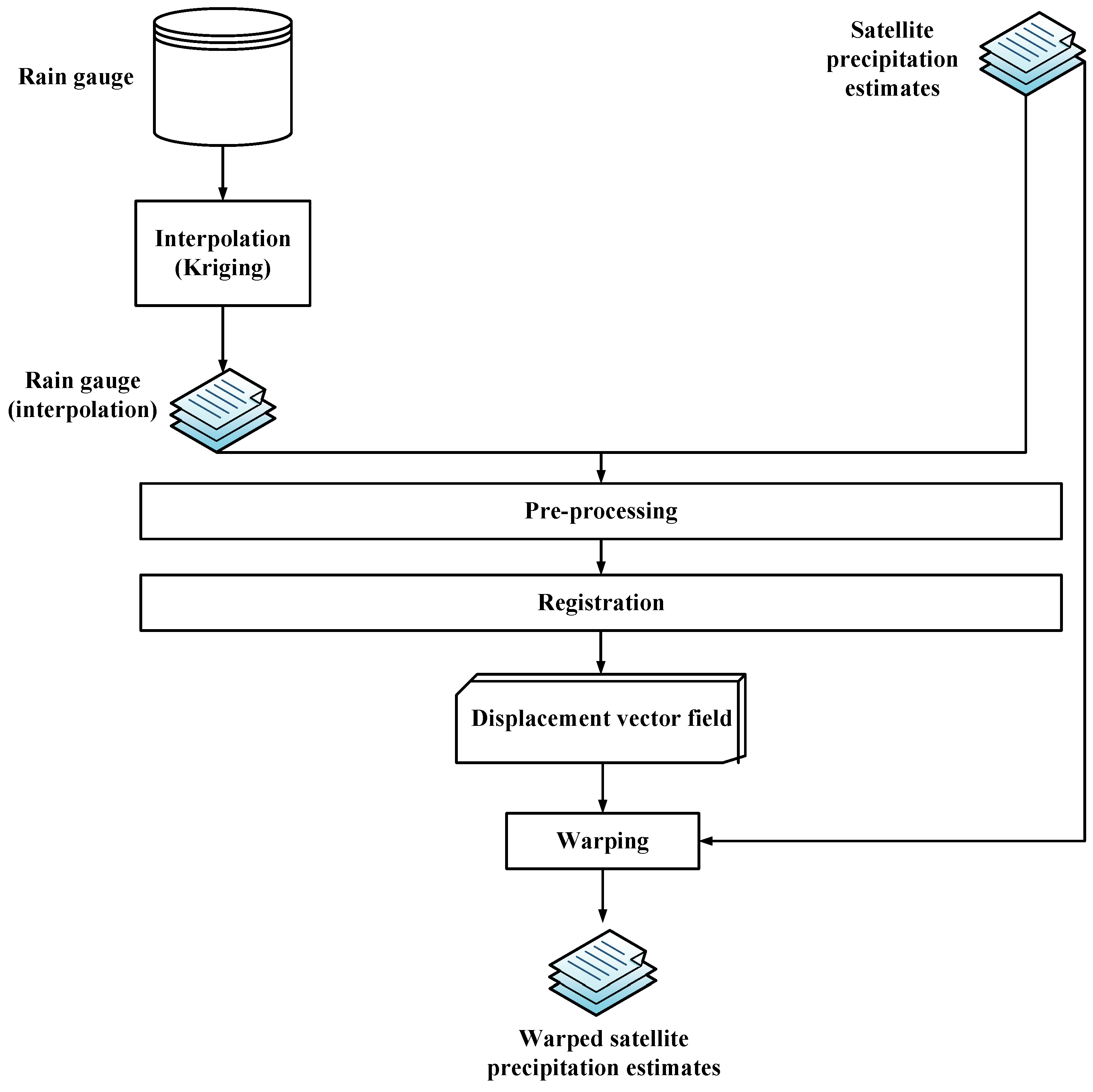
2.2.1. Image Registration and Warping
2.2.2. Satellite Data Evaluation Indicators
2.2.3. Error Decomposition Method
3. Results and Analysis
3.1. Precipitation Field Image Registration and Warping
3.2. Statistical Analysis
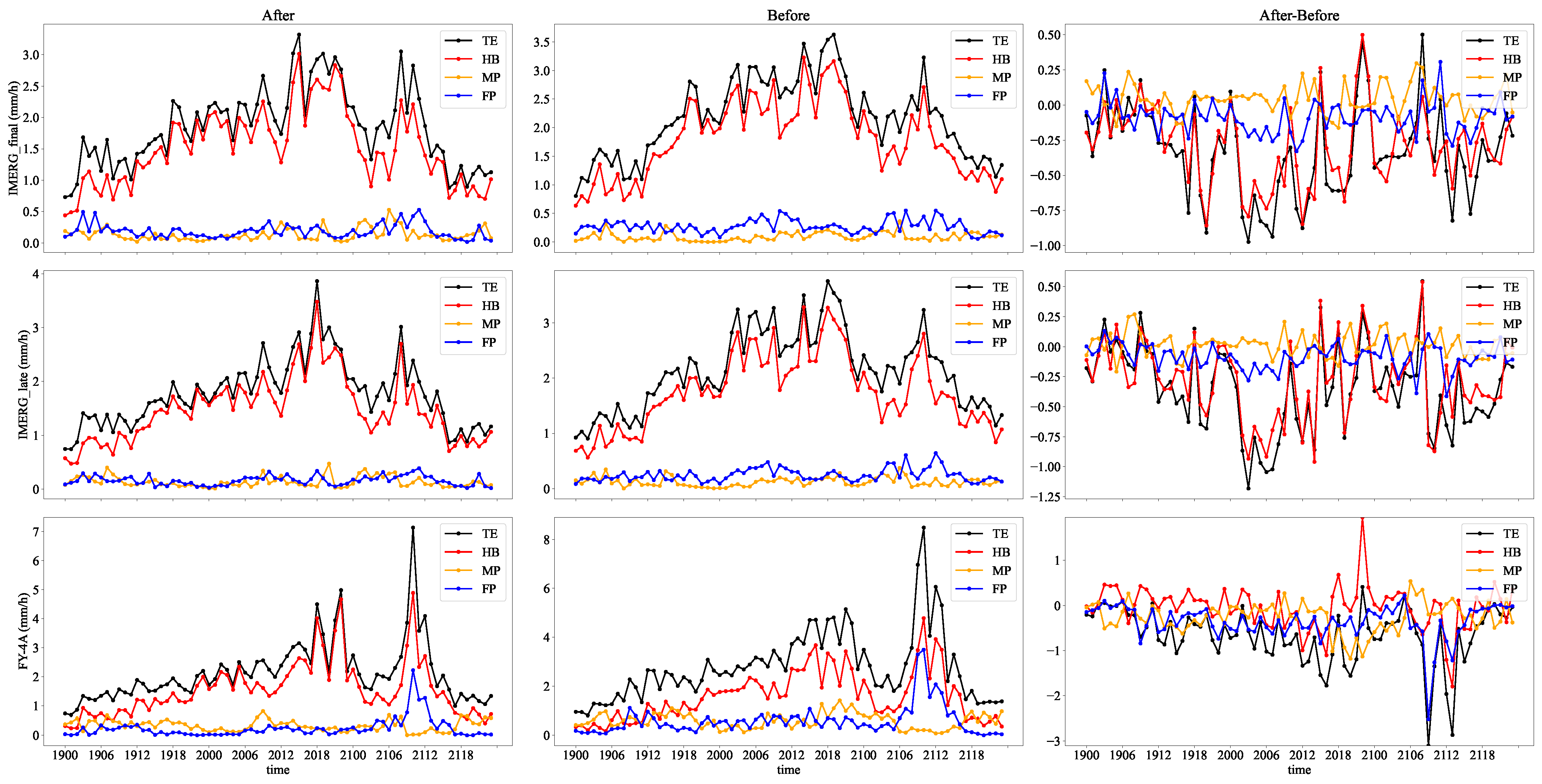
3.3. Error Decomposition
4. Discussion
4.1. Effectiveness and Sensitivity of the Method
4.2. Limitations and Prospects
5. Conclusions
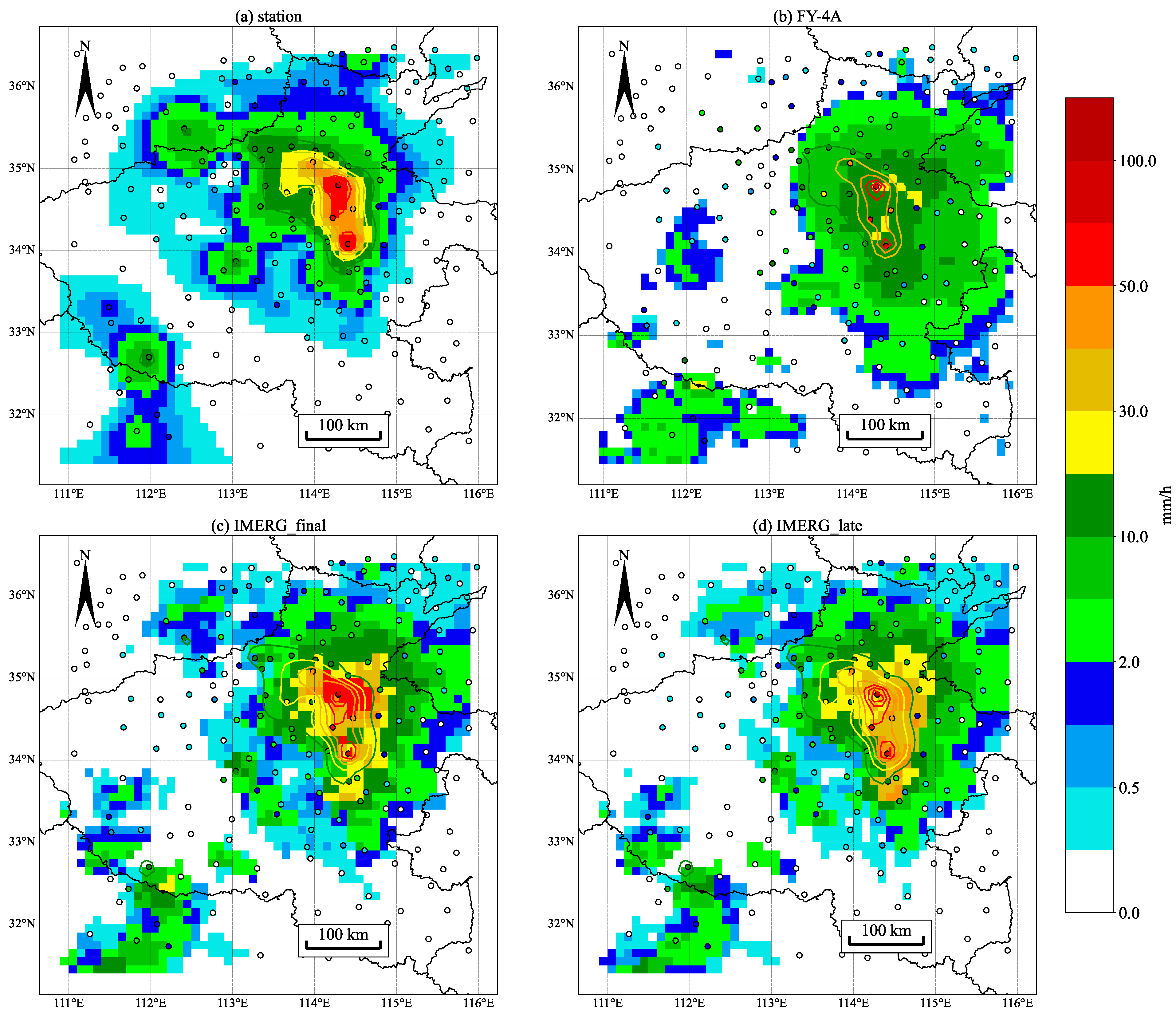
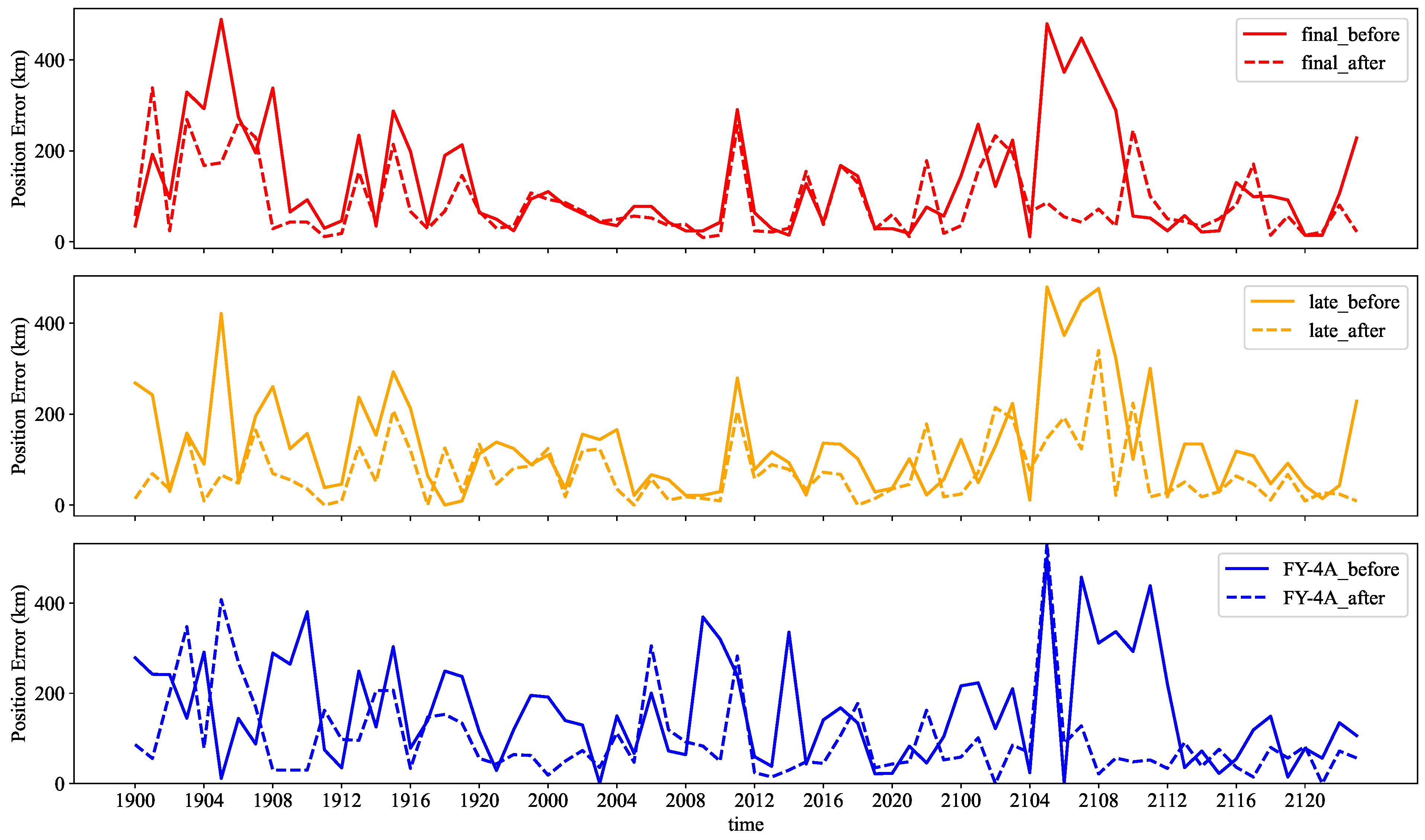
- Evaluations of SPEs: Compared with rain gauge stations, the distribution of satellite precipitation estimates in Henan extreme precipitation events has an easterly distribution position error. Among the three satellite precipitation products, IMERG final run has the highest numerical accuracy but FY-4A has the lowest because FY-4A has difficulty inverting very light and very high precipitation values accurately during extreme precipitation events.
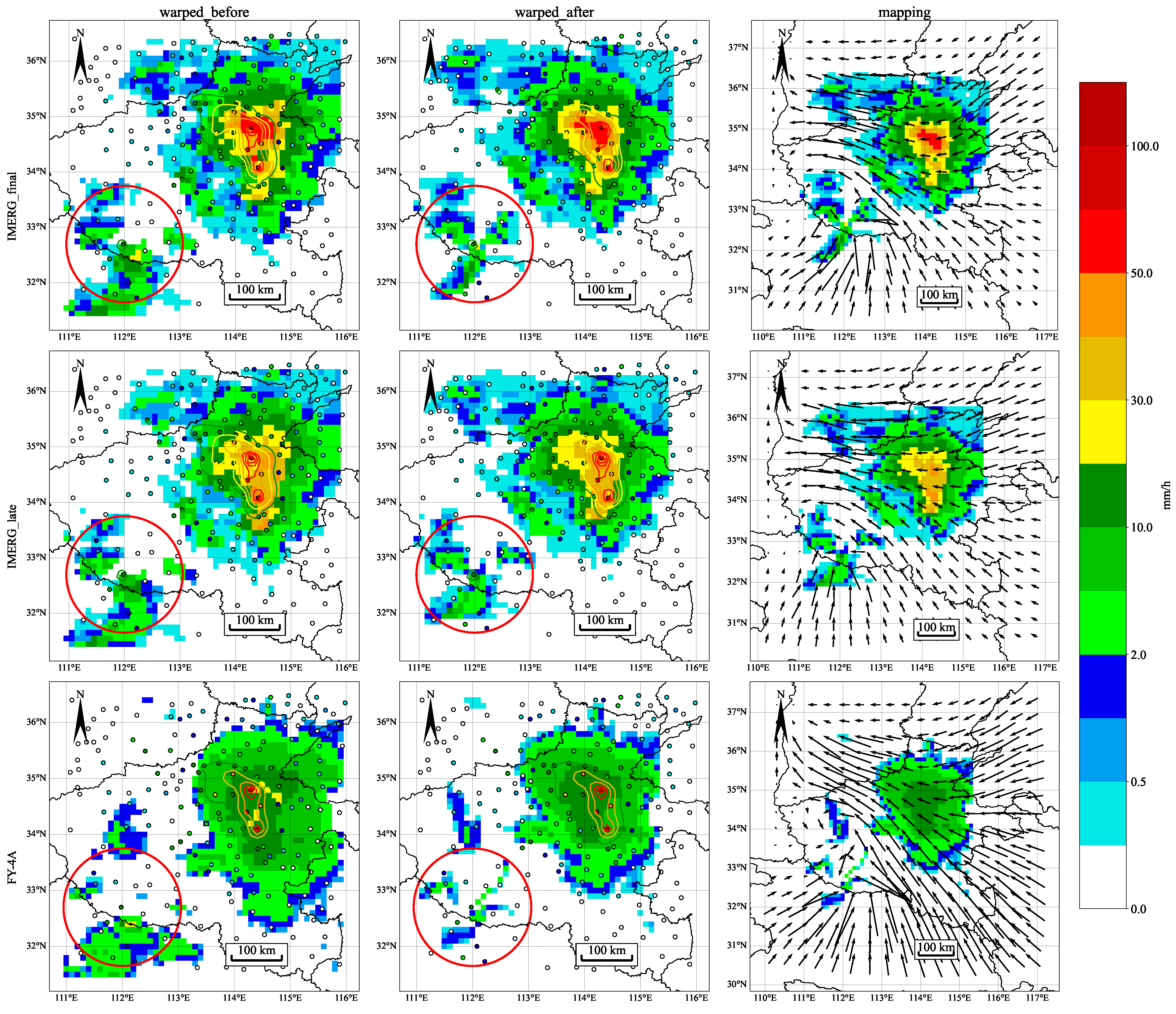
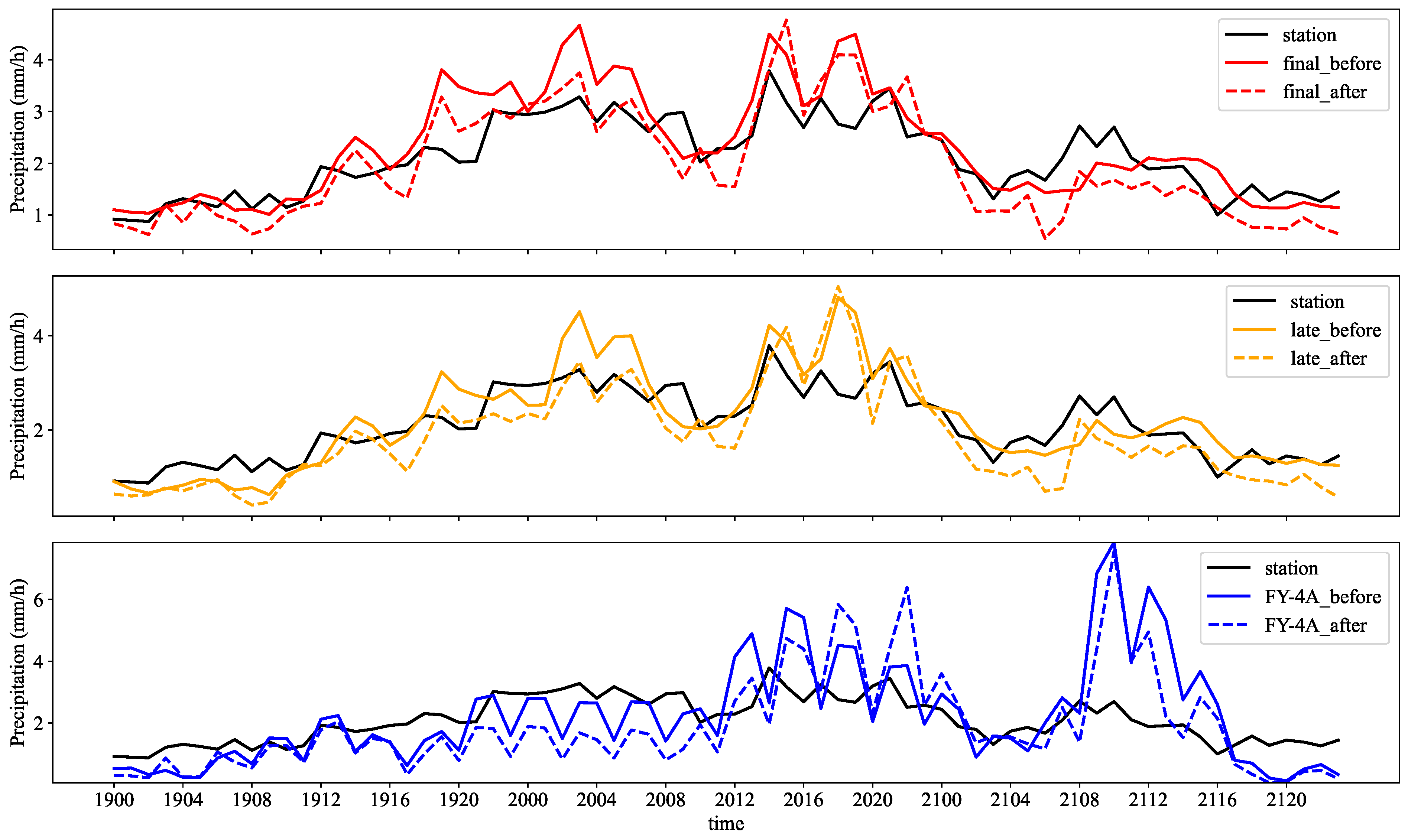
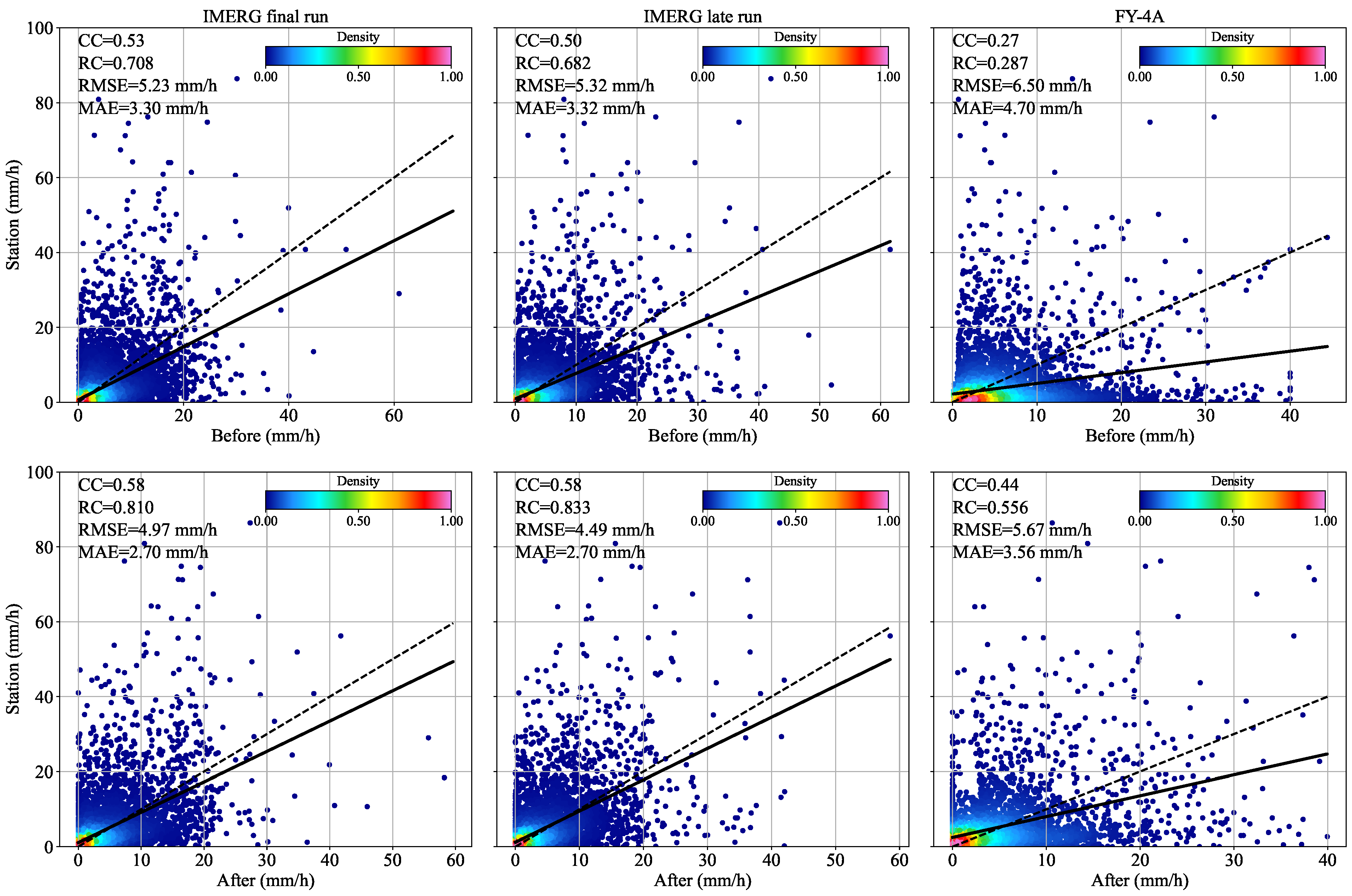
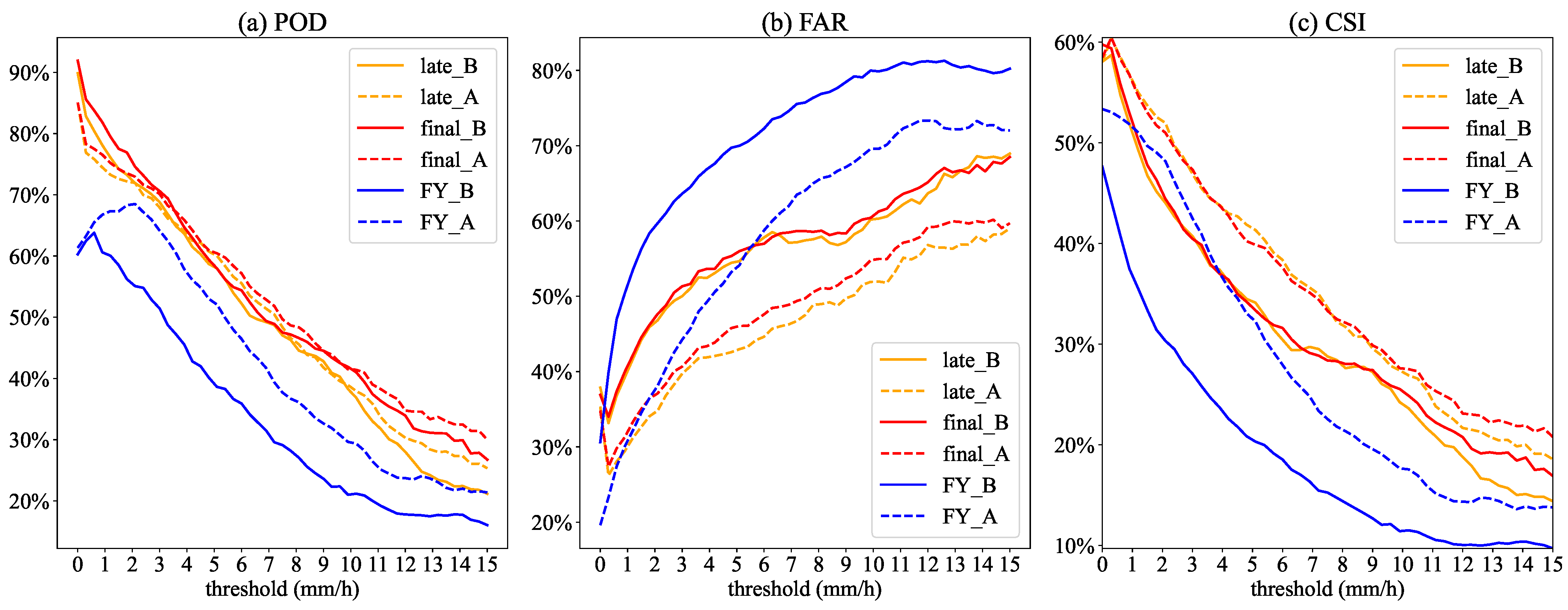
- Method effects: The position correction method based on image registration and warping method can effectively reduce the error of satellite precipitation products and FAR, as well as improve POD, CSI, and the fit to the rain gauge stations. The improvement in the final run is limited, with a mean absolute error improvement of only 14%, while the improvement in FY-4A is the most significant, with a mean absolute error improvement of 23% and, in particular, a 63% improvement in its correlation coefficient with rain gauge station data. The improved late run had the best performance and the lowest error. The stability of the position correction method is good and it is also suitable for light precipitation.
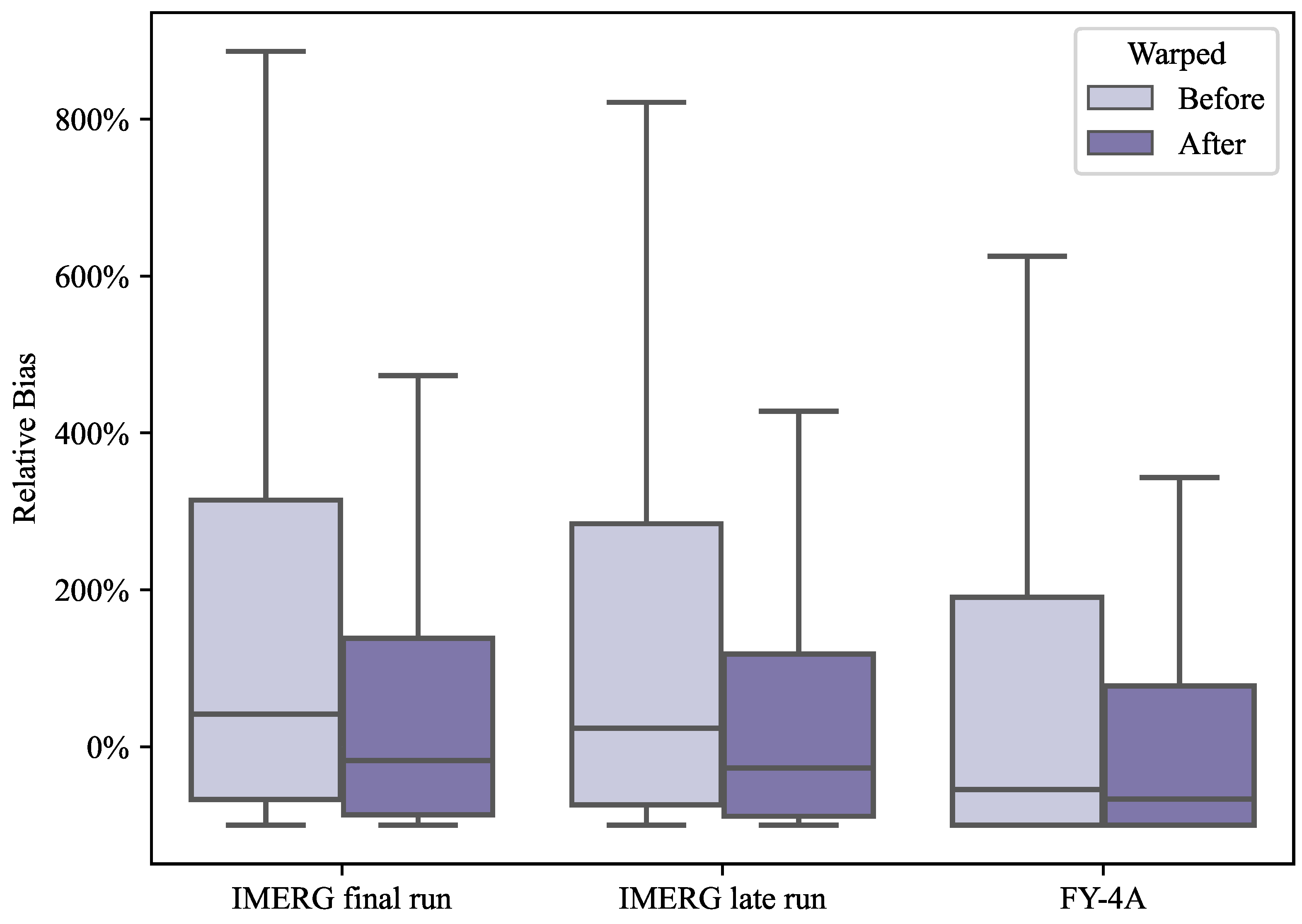
- Error component improvement contributions: The IMERG precipitation product primarily benefits from position correction in terms of hit bias, with the biases of hit precipitation improving more than 81%. For the FY-4A, position correction mainly reduces the total error by reducing the number of false alarms, which accounts for 55%, and its improvement on the hit bias is not significant because of the detection inversion mechanisms of the FY-4A.
- Limitations: The registration algorithm is more sensitive to the precipitation center with a high value and will preferentially register the precipitation center. If the precipitation distribution is discontinuous or there are multiple precipitation centers, it may cause instability and failure in the registration process or a long convergence iteration process.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
- Smoothing and normalization: The images p and q are smoothed by a two-dimensional Gaussian convolution; then, the two smoothed fields are normalized to be at the same magnitude. Since the Gaussian width becomes narrower as the grid gets finer, the large-scale features on the coarse grid can be captured and the more detailed small-scale features of the image on the fine grid can be complemented through the registration method in this step. Iterating over different resolutions of the grid can achieve a balance between registration goals and computational efficiency, greatly reducing the computational cost. In addition, the nonconvexity of the loss function may lead to local minima, while the large-scale sampling of the smoothed image on the coarse grid can effectively reduce the local minima problem.
- Initialization: In the iterative process, the mapping function M needs to be initialized. In this paper, we adopt the method of Ref. [44], given an initial guess , when i = 1, is set to 0, representing no warping. The optimal in is obtained through updating by solving the optimization problem; then, is interpolated to as the initial guess of .
- Optimization: The loss function is discretized on the grid , while is discretized on . The main contributing part of the loss function is . In this paper, the iterative barrier method is used to transform the constrained minimization problem into an unconstrained problem by combining the methods of References [44,48,70,71].
Appendix B
Appendix B.1

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lower Whisker | Q1 | Q2 | Q3 | Upper Whisker | Mild Outlier | ||
|---|---|---|---|---|---|---|---|
| final | Before | −100% | −67.2% | 41.5% | 314.4% | 886.4% | 641 |
| After | −100% | −86.7% | −17.6% | 138.1% | 473% | 611 | |
| late | Before | −100% | −74.2% | 23.7% | 284.2% | 821.4% | 657 |
| After | −100% | −88.6% | −27% | 118.3% | 427.7% | 589 | |
| FY-4A | Before | −100% | −100% | −54.5% | 190.4% | 625% | 907 |
| After | −100% | −100% | −66.7% | 77.5% | 343.1% | 775 |
Appendix B.2
| Threshold | POD | FAR | CSI | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| mm/h | Late | Final | FY-4A | Late | Final | FY-4A | Late | Final | FY-4A | |
| 0 | Before | 90% | 92% | 60% | 38% | 37% | 31% | 58% | 60% | 48% |
| After | 85% | 85% | 61% | 35% | 35% | 20% | 58% | 58% | 53% | |
| 7.5 | Before | 46% | 47% | 28% | 58% | 59% | 76% | 28% | 28% | 15% |
| After | 47% | 49% | 37% | 49% | 51% | 65% | 32% | 32% | 22% | |
| 15 | Before | 21% | 27% | 16% | 69% | 68% | 80% | 14% | 17% | 10% |
| After | 25% | 30% | 21% | 59% | 60% | 72% | 19% | 21% | 14% |
| Threshold | H | F | M | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| mm/h | Late | Final | FY-4A | Late | Final | FY-4A | Late | Final | FY-4A | |
| 0 | Before | 5390 | 5512 | 3616 | 3284 | 3224 | 1596 | 408 | 486 | 2382 |
| After | 5102 | 5101 | 3679 | 2787 | 2725 | 897 | 896 | 897 | 2319 | |
| 7.5 | Before | 499 | 504 | 309 | 673 | 715 | 964 | 562 | 557 | 752 |
| After | 513 | 527 | 400 | 464 | 521 | 712 | 548 | 534 | 661 | |
| 15 | Before | 91 | 115 | 69 | 202 | 250 | 280 | 339 | 315 | 361 |
| After | 109 | 129 | 92 | 157 | 191 | 237 | 321 | 301 | 338 |
References
- Hou, A.Y.; Kakar, R.K.; Neeck, S.; Azarbarzin, A.A.; Kummerow, C.D.; Kojima, M.; Oki, R.; Nakamura, K.; Iguchi, T. The global precipitation measurement mission. Bull. Am. Meteorol. Soc. 2014, 95, 701–722. [Google Scholar] [CrossRef]
- Blacutt, L.A.; Herdies, D.L.; de Gonçalves, L.G.G.; Vila, D.A.; Andrade, M. Precipitation comparison for the CFSR, MERRA, TRMM3B42 and Combined Scheme datasets in Bolivia. Atmos. Res. 2015, 163, 117–131. [Google Scholar] [CrossRef] [Green Version]
- Hou, A.Y. Precipitation Measurements from Space: The Global Precipitation Measurement Mission. Bull. Am. Meteorol. Soc. 2007, 95, 701–722. [Google Scholar] [CrossRef]
- Easterling, D.R.; Meehl, G.A.; Parmesan, C.; Changnon, S.A.; Karl, T.R.; Mearns, L.O. Climate extremes: Observations, modeling, and impacts. Science 2000, 289, 2068–2074. [Google Scholar] [CrossRef] [Green Version]
- Ban, N.; Schmidli, J.; Schär, C. Heavy precipitation in a changing climate: Does short-term summer precipitation increase faster? Geophys. Res. Lett. 2015, 42, 1165–1172. [Google Scholar] [CrossRef]
- Jonkman, S.N. Global perspectives on loss of human life caused by floods. Nat. Hazards 2005, 34, 151–175. [Google Scholar] [CrossRef]
- Xu, Q.; Chen, J.; Peart, M.R.; Ng, C.N.; Hau, B.C.; Law, W.W. Exploration of severities of rainfall and runoff extremes in ungauged catchments: A case study of Lai Chi Wo in Hong Kong, China. Sci. Total Environ. 2018, 634, 640–649. [Google Scholar] [CrossRef]
- Douville, H.; Raghavan, K.; Renwick, J.; Allan, R.; Arias, P.; Barlow, M.; Cerezo-Mota, R.; Cherchi, A.; Gan, T.; Gergis, J.; et al. Weather and Climate Extreme Events in a Changing Climate. In Climate Change 2021: The Physical Science Basis; IPCC: Geneva, Switzerland, 2021; pp. 1513–1766. [Google Scholar]
- Gao, T.; Xie, L. Study on progress of the trends and physical causes of extreme precipitation in China during the last 50 years. Adv. Earth Sci. 2014, 29, 577–589. [Google Scholar]
- Fekete, A.; Sandholz, S. Here comes the flood, but not failure? Lessons to learn after the heavy rain and pluvial floods in Germany 2021. Water 2021, 13, 3016. [Google Scholar] [CrossRef]
- Zhu, H.; Chen, S. Assessment on error of GPM satellite-based precipitation products during ‘7.21’ extreme rainstorm in Henan. Water Resour. Hydropower Eng. 2022, 53, 1–13. [Google Scholar]
- Li, W.; Ma, H.; Fu, R.; Han, H.; Wang, X. Development and Maintenance Mechanisms of a Long-Lived Mesoscale Vortex Which Governed the Earlier Stage of the “21.7” Henan Torrential Rainfall Event. Front. Earth Sci. 2022, 10, 909662. [Google Scholar] [CrossRef]
- Nie, Y.; Sun, J. Moisture Sources and Transport for Extreme Precipitation over Henan in July 2021. Geophys. Res. Lett. 2022, 49, e2021GL097446. [Google Scholar] [CrossRef]
- Xia, Z.; Hui, Y.; Xinmin, W.; Lin, S.; Di, W.; Han, L. Analysis on characteristic and abnormality of atmospheric circulations of the July 2021 extreme precipitation in Henan. Trans. Atmos. Sci. 2021, 44, 672–687. [Google Scholar]
- Zhang, S.; Ma, Z.; Li, Z.; Zhang, P.; Liu, Q.; Nan, Y.; Zhang, J.; Hu, S.; Feng, Y.; Zhao, H. Using CYGNSS Data to Map Flood Inundation during the 2021 Extreme Precipitation in Henan Province, China. Remote Sens. 2021, 13, 5181. [Google Scholar] [CrossRef]
- Shi, C.; Zhou, L.; Fan, L.; Zhang, W.; Cao, Y.; Wang, C.; Xiao, F.; LÜ, G.; Liang, H. Analysis of “21· 7” extreme rainstorm process in Henan Province using BeiDou/GNSS observation. Chin. J. Geophys. 2022, 65, 186–196. [Google Scholar]
- Shi, W.; Li, X.; Zeng, M.; Zhang, B.; Wang, H.; Zhu, K.; Zhuge, X. Multi-model comparison and high-resolution regional model forecast analysis for the ‘7· 20’Zhengzhou severe heavy rain. Trans. Atmos. Sci. 2021, 44, 688–702. [Google Scholar]
- Xu, L.; Cheng, W.; Deng, Z.; Liu, J.; Wang, B.; Lu, B.; Wang, S.; Dong, L. Assimilation of the FY-4A AGRI Clear-Sky Radiance Data in a Regional Numerical Model and Its Impact on the Forecast of the “21· 7” Henan Extremely Persistent Heavy Rainfall. Adv. Atmos. Sci. 2022, 1–17. [Google Scholar] [CrossRef]
- Ding, Y. On the study of the unprecedented heavy rainfall in Henan Province during 4–8 August 1975: Review and assessment. Acta Meteor. Sin 2015, 73, 411–424. [Google Scholar]
- Lang, Y.; Jiang, Z.; Wu, X. Investigating the Linkage between Extreme Rainstorms and Concurrent Synoptic Features: A Case Study in Henan, Central China. Water 2022, 14, 1065. [Google Scholar] [CrossRef]
- Zhang, S.; Chen, Y.; Luo, Y.; Liu, B.; Ren, G.; Zhou, T.; Martinez-Villalobos, C.; Chang, M. Revealing the Circulation Pattern Most Conducive to Precipitation Extremes in Henan Province of North China. Geophys. Res. Lett. 2022, 49, e2022GL098034. [Google Scholar] [CrossRef]
- Kucera, P.A.; Ebert, E.E.; Turk, F.J.; Levizzani, V.; Kirschbaum, D.; Tapiador, F.J.; Loew, A.; Borsche, M. Precipitation from space: Advancing Earth system science. Bull. Am. Meteorol. Soc. 2013, 94, 365–375. [Google Scholar] [CrossRef]
- Petersen, W.A.; Christian, H.J.; Rutledge, S.A. TRMM observations of the global relationship between ice water content and lightning. Geophys. Res. Lett. 2005, 32, 2471–2494. [Google Scholar] [CrossRef] [Green Version]
- Villarini, G.; Mandapaka, P.V.; Krajewski, W.F.; Moore, R.J. Rainfall and sampling uncertainties: A rain gauge perspective. J. Geophys. Res. Atmos. 2008, 113, D11102. [Google Scholar] [CrossRef]
- Girons Lopez, M.; Wennerström, H.; Nordén, L.Å.; Seibert, J. Location and density of rain gauges for the estimation of spatial varying precipitation. Geogr. Ann. Ser. Phys. Geogr. 2015, 97, 167–179. [Google Scholar] [CrossRef] [Green Version]
- Omranian, E.; Sharif, H.O.; Tavakoly, A.A. How well can global precipitation measurement (GPM) capture hurricanes? Case study: Hurricane Harvey. Remote Sens. 2018, 10, 1150. [Google Scholar] [CrossRef] [Green Version]
- Xu, J.; Ma, Z.; Tang, G.; Ji, Q.; Min, X.; Wan, W.; Shi, Z. Quantitative evaluations and error source analysis of Fengyun-2-based and GPM-based precipitation products over mainland China in summer, 2018. Remote Sens. 2019, 11, 2992. [Google Scholar] [CrossRef] [Green Version]
- Kitchen, M.; Brown, R.; Davies, A. Real-time correction of weather radar data for the effects of bright band, range and orographic growth in widespread precipitation. Q. J. R. Meteorol. Soc. 1994, 120, 1231–1254. [Google Scholar] [CrossRef]
- Westrick, K.J.; Mass, C.F.; Colle, B.A. The limitations of the WSR-88D radar network for quantitative precipitation measurement over the coastal western United States. Bull. Am. Meteorol. Soc. 1999, 80, 2289–2298. [Google Scholar] [CrossRef]
- Huffman, G.J.; Adler, R.F.; Morrissey, M.M.; Bolvin, D.T.; Curtis, S.; Joyce, R.; McGavock, B.; Susskind, J. Global precipitation at one-degree daily resolution from multisatellite observations. J. Hydrometeorol. 2001, 2, 36–50. [Google Scholar] [CrossRef] [Green Version]
- Shige, S.; Yamamoto, T.; Tsukiyama, T.; Kida, S.; Ashiwake, H.; Kubota, T.; Seto, S.; Aonashi, K.; Okamoto, K. The GSMaP precipitation retrieval algorithm for microwave sounders—Part I: Over-ocean algorithm. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3084–3097. [Google Scholar] [CrossRef]
- Gaona, M.R.; Overeem, A.; Leijnse, H.; Uijlenhoet, R. First-year evaluation of GPM rainfall over the Netherlands: IMERG day 1 final run (V03D). J. Hydrometeorol. 2016, 17, 2799–2814. [Google Scholar] [CrossRef]
- Ren, J.; Xu, G.; Zhang, W.; Leng, L.; Xiao, Y.; Wan, R.; Wang, J. Evaluation and Improvement of FY-4A AGRI Quantitative Precipitation Estimation for Summer Precipitation over Complex Topography of Western China. Remote Sens. 2021, 13, 4366. [Google Scholar] [CrossRef]
- Setiawati, M.D.; Miura, F. Evaluation of Gsmap daily rainfall satellite data for flood monitoring: Case study—Kyushu Japan. J. Geosci. Environ. Prot. 2016, 4, 101. [Google Scholar] [CrossRef] [Green Version]
- Hossain, F.; Lettenmaier, D.P. Flood prediction in the future: Recognizing hydrologic issues in anticipation of the Global Precipitation Measurement mission. Water Resour. Res. 2006, 42, W11301. [Google Scholar] [CrossRef]
- Yong, B.; Ren, L.L.; Hong, Y.; Wang, J.H.; Gourley, J.J.; Jiang, S.H.; Chen, X.; Wang, W. Hydrologic evaluation of Multisatellite Precipitation Analysis standard precipitation products in basins beyond its inclined latitude band: A case study in Laohahe basin, China. Water Resour. Res. 2010, 46, W07542. [Google Scholar] [CrossRef] [Green Version]
- Nehrkorn, T.; Woods, B.K.; Hoffman, R.N.; Auligné, T. Correcting for position errors in variational data assimilation. Mon. Weather Rev. 2015, 143, 1368–1381. [Google Scholar] [CrossRef] [Green Version]
- Han, F.; Szunyogh, I. A morphing-based technique for the verification of precipitation forecasts. Mon. Weather Rev. 2016, 144, 295–313. [Google Scholar] [CrossRef]
- Liu, Y.; Li, Z.; Liu, Z.; Luo, Y. Impact of rainfall spatiotemporal variability and model structures on flood simulation in semi-arid regions. Stoch. Environ. Res. Risk Assess. 2022, 36, 785–809. [Google Scholar] [CrossRef]
- Grassotti, C.; Iskenderian, H.; Hoffman, R.N. Calibration and alignment. J. Appl. Meteorol. 1999, 38, 677–695. [Google Scholar] [CrossRef]
- Wu, H.; Yang, Q.; Liu, J.; Wang, G. A spatiotemporal deep fusion model for merging satellite and gauge precipitation in China. J. Hydrol. 2020, 584, 124664. [Google Scholar] [CrossRef]
- Zhou, L.; Koike, T.; Takeuchi, K.; Rasmy, M.; Onuma, K.; Ito, H.; Selvarajah, H.; Liu, L.; Li, X.; Ao, T. A study on availability of ground observations and its impacts on bias correction of satellite precipitation products and hydrologic simulation efficiency. J. Hydrol. 2022, 610, 127595. [Google Scholar] [CrossRef]
- Le, X.H.; Lee, G.; Jung, K.; An, H.u.; Lee, S.; Jung, Y. Application of convolutional neural network for spatiotemporal bias correction of daily satellite-based precipitation. Remote Sens. 2020, 12, 2731. [Google Scholar] [CrossRef]
- Le Coz, C.; Heemink, A.; Verlaan, M.; ten Veldhuis, M.C.; van de Giesen, N. Correcting position error in precipitation data using image morphing. Remote Sens. 2019, 11, 2557. [Google Scholar] [CrossRef] [Green Version]
- Lopez, P. Direct 4D-Var assimilation of NCEP stage IV radar and gauge precipitation data at ECMWF. Mon. Weather Rev. 2011, 139, 2098–2116. [Google Scholar] [CrossRef]
- Hoffman, R.N.; Grassotti, C. A technique for assimilating SSM/I observations of marine atmospheric storms: Tests with ECMWF analyses. J. Appl. Meteorol. Climatol. 1996, 35, 1177–1188. [Google Scholar] [CrossRef] [Green Version]
- Nehrkorn, T.; Woods, B.; Auligné, T.; Hoffman, R.N. Application of feature calibration and alignment to high-resolution analysis: Examples using observations sensitive to cloud and water vapor. Mon. Weather Rev. 2014, 142, 686–702. [Google Scholar] [CrossRef] [Green Version]
- Beezley, J.D.; Mandel, J. Morphing ensemble Kalman filters. Tellus A Dyn. Meteorol. Oceanogr. 2008, 60, 131–140. [Google Scholar] [CrossRef] [Green Version]
- Le Coz, C.; van de Giesen, N. Comparison of rainfall products over sub-saharan africa. J. Hydrometeorol. 2020, 21, 553–596. [Google Scholar] [CrossRef]
- Brown, L. A survey of image registration Techniques. ACM Comput. Surv. 1992, 24, 325–376. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhao, Y.f.; Fan, S.h. Development of hourly precipitation datasets for national meteorological stations in China. Torrential Rain Disasters 2016, 35, 182–186. [Google Scholar]
- Huffman, G.J.; Bolvin, D.T.; Braithwaite, D.; Hsu, K.L.; Joyce, R.J.; Kidd, C.; Nelkin, E.J.; Sorooshian, S.; Stocker, E.F.; Tan, J.; et al. Integrated multi-satellite retrievals for the global precipitation measurement (GPM) mission (IMERG). In Satellite Precipitation Measurement; Springer: Berlin, Germany, 2020; pp. 343–353. [Google Scholar]
- Tan, M.L.; Ibrahim, A.L.; Duan, Z.; Cracknell, A.P.; Chaplot, V. Evaluation of six high-resolution satellite and ground-based precipitation products over Malaysia. Remote Sens. 2015, 7, 1504–1528. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Yang, Y.; Mi, J.; Bi, X.; Zhao, Y.; Huang, Z.; Liu, C.; Zong, L.; Li, W. Leveraging machine learning for quantitative precipitation estimation from Fengyun-4 geostationary observations and ground meteorological measurements. Atmos. Meas. Tech. 2021, 14, 7007–7023. [Google Scholar] [CrossRef]
- Sun, S.; Mu, L.; Wang, L.; Liu, P. L-UNet: An LSTM network for remote sensing image change detection. IEEE Geosci. Remote Sens. Lett. 2020, 99, 1–5. [Google Scholar] [CrossRef]
- He, K.; Lian, C.; Adeli, E.; Huo, J.; Gao, Y.; Zhang, B.; Zhang, J.; Shen, D. MetricUNet: Synergistic image-and voxel-level learning for precise prostate segmentation via online sampling. Med. Image Anal. 2021, 71, 102039. [Google Scholar] [CrossRef]
- Dalca, A.V.; Balakrishnan, G.; Guttag, J.; Sabuncu, M.R. Unsupervised learning of probabilistic diffeomorphic registration for images and surfaces. Med. Image Anal. 2019, 57, 226–236. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Dan, T.; Yang, Y. Multi-temporal remote sensing image registration using deep convolutional features. IEEE Access 2018, 6, 38544–38555. [Google Scholar] [CrossRef]
- Ye, F.; Su, Y.; Xiao, H.; Zhao, X.; Min, W. Remote sensing image registration using convolutional neural network features. IEEE Geosci. Remote Sens. Lett. 2018, 15, 232–236. [Google Scholar] [CrossRef]
- Balakrishnan, G.; Zhao, A.; Sabuncu, M.R.; Guttag, J.; Dalca, A.V. VoxelMorph: A learning framework for deformable medical image registration. IEEE Trans. Med. Imaging 2019, 38, 1788–1800. [Google Scholar] [CrossRef] [Green Version]
- Balakrishnan, G.; Zhao, A.; Sabuncu, M.R.; Guttag, J.; Dalca, A.V. An unsupervised learning model for deformable medical image registration. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 9252–9260. [Google Scholar]
- Ebert, E.E.; Janowiak, J.E.; Kidd, C. Comparison of near-real-time precipitation estimates from satellite observations and numerical models. Bull. Am. Meteorol. Soc. 2007, 88, 47–64. [Google Scholar] [CrossRef] [Green Version]
- Tian, Y.; Peters-Lidard, C.D.; Eylander, J.B.; Joyce, R.J.; Huffman, G.J.; Adler, R.F.; Hsu, K.l.; Turk, F.J.; Garcia, M.; Zeng, J. Component analysis of errors in satellite-based precipitation estimates. J. Geophys. Res. Atmos. 2009, 114, D24101. [Google Scholar] [CrossRef] [Green Version]
- Tang, S.; Li, R.; He, J.; Fan, X.; Wang, H.; Yao, S. Seasonal error component analysis of the GPM IMERG version 05 precipitation estimations over Sichuan basin of China. Earth Space Sci. 2021, 8, e2020EA001259. [Google Scholar] [CrossRef]
- Le Coz, C. Setting Africa’s Rainfall Straight: A Warping Approach to Position and Timing Errors in Rainfall Estimates; Delft University of Technology: Delft, The Netherlands, 2021. [Google Scholar]
- Long, W.; Qin, M.; Jianjun, Z.; Yanling, F.; Xiaoping, Z. Precise comparison of spatial interpolation for precipitation using KRIGING and TPS (thin plate smoothing spline) methods in Loess Plateau. Sci. Soil Water Conserv. 2011, 9, 79–87. [Google Scholar]
- Li, J.; Zhang, J.; Zhang, C.; Chen, Q. Analyze and compare the spatial interpolation methods for climate factor. Pratacult. Sci. 2006, 23, 6–11. [Google Scholar]
- Lucas, M.P.; Longman, R.J.; Giambelluca, T.W.; Frazier, A.G.; Mclean, J.; Cleveland, S.B.; Huang, Y.F.; Lee, J. Optimizing automated kriging to improve spatial interpolation of monthly rainfall over complex terrain. J. Hydrometeorol. 2022, 23, 561–572. [Google Scholar] [CrossRef]
- Soenario, I.; Plieger, M.; Sluiter, R. Optimization of Rainfall Interpolation; Technical Report; Ministerie van Verkeer en Waterstaat, Konijklijk Nederlands Meteorologisch Institute: De Bilt, The Netherlands, 2010. [Google Scholar]
- Potra, F.A.; Wright, S.J. Interior-point methods. J. Comput. Appl. Math. 2000, 124, 281–302. [Google Scholar] [CrossRef] [Green Version]
- Nocedal, J.; Wright, S.J. Penalty and augmented Lagrangian methods. In Numerical Optimization; Springer: New York, NY, USA, 2006; pp. 497–528. [Google Scholar]









| Indicators | Formula | Optimal | Units |
|---|---|---|---|
| RMSE | 0 | mm/h | |
| MAE | 0 | mm/h | |
| RB | 0 | % | |
| CC | 1 | - | |
| POD | 1 | - | |
| FAR | 0 | - | |
| CSI | 1 | - |
| RMSE | RMSE_gird | MAE | MAE_grid | CC | CC_grid | APE (km) | RC | ||
|---|---|---|---|---|---|---|---|---|---|
| final | Before | 5.23 | 3.30 | 2.15 | 1.46 | 0.53 | 0.61 | 129.83 | 0.71 |
| After | 4.97 | 2.70 | 1.84 | 1.08 | 0.58 | 0.72 | 86.74 | 0.81 | |
| late | Before | 5.32 | 3.32 | 2.12 | 1.39 | 0.50 | 0.58 | 133.61 | 0.68 |
| After | 4.49 | 2.70 | 1.78 | 1.03 | 0.58 | 0.71 | 72.17 | 0.83 | |
| FY-4A | Before | 6.50 | 4.70 | 2.79 | 2.14 | 0.27 | 0.30 | 161.88 | 0.29 |
| After | 5.67 | 3.56 | 2.13 | 1.37 | 0.44 | 0.55 | 98.47 | 0.56 |
| MAE () mm/h | MAE () mm/h | MAE () mm/h | MAE () mm/h | ||
|---|---|---|---|---|---|
| Before | 2.17 | 1.81 | 0.09 | 0.27 | |
| final | After | 1.84 | 1.52 | 0.13 | 0.18 |
| After–Before | −0.34 | −0.29 | 0.04 | −0.09 | |
| Before | 2.14 | 1.77 | 0.12 | 0.25 | |
| late | After | 1.78 | 1.48 | 0.13 | 0.16 |
| After–Before | −0.36 | −0.29 | 0.01 | −0.09 | |
| Before | 2.79 | 1.60 | 0.59 | 0.59 | |
| FY-4A | After | 2.13 | 1.56 | 0.33 | 0.23 |
| After–Before | −0.66 | −0.04 | −0.26 | −0.36 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, W.; Cao, X.; Peng, K. Technology for Position Correction of Satellite Precipitation and Contributions to Error Reduction—A Case of the ‘720’ Rainstorm in Henan, China. Sensors 2022, 22, 5583. https://doi.org/10.3390/s22155583
Tian W, Cao X, Peng K. Technology for Position Correction of Satellite Precipitation and Contributions to Error Reduction—A Case of the ‘720’ Rainstorm in Henan, China. Sensors. 2022; 22(15):5583. https://doi.org/10.3390/s22155583
Chicago/Turabian StyleTian, Wenlong, Xiaoqun Cao, and Kecheng Peng. 2022. "Technology for Position Correction of Satellite Precipitation and Contributions to Error Reduction—A Case of the ‘720’ Rainstorm in Henan, China" Sensors 22, no. 15: 5583. https://doi.org/10.3390/s22155583