
Real-Time Detection and Short-Term Prediction of Blast Furnace Burden Level Based on Space-Time Fusion Features


Abstract
:1. Introduction
2. Space Dimensional Feature Extraction
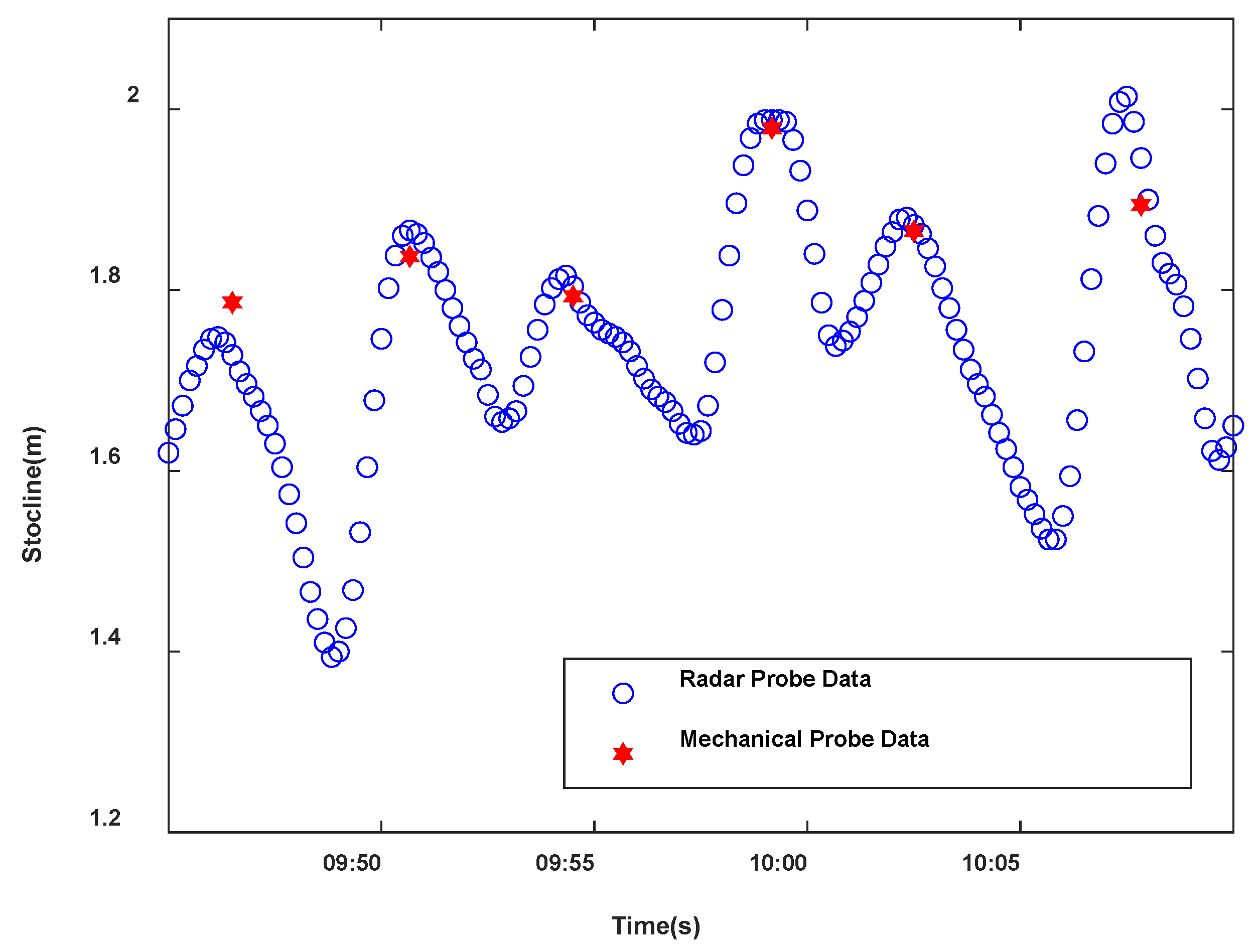
2.1. Analysis of the Mechanical Probe Data and Radar Data
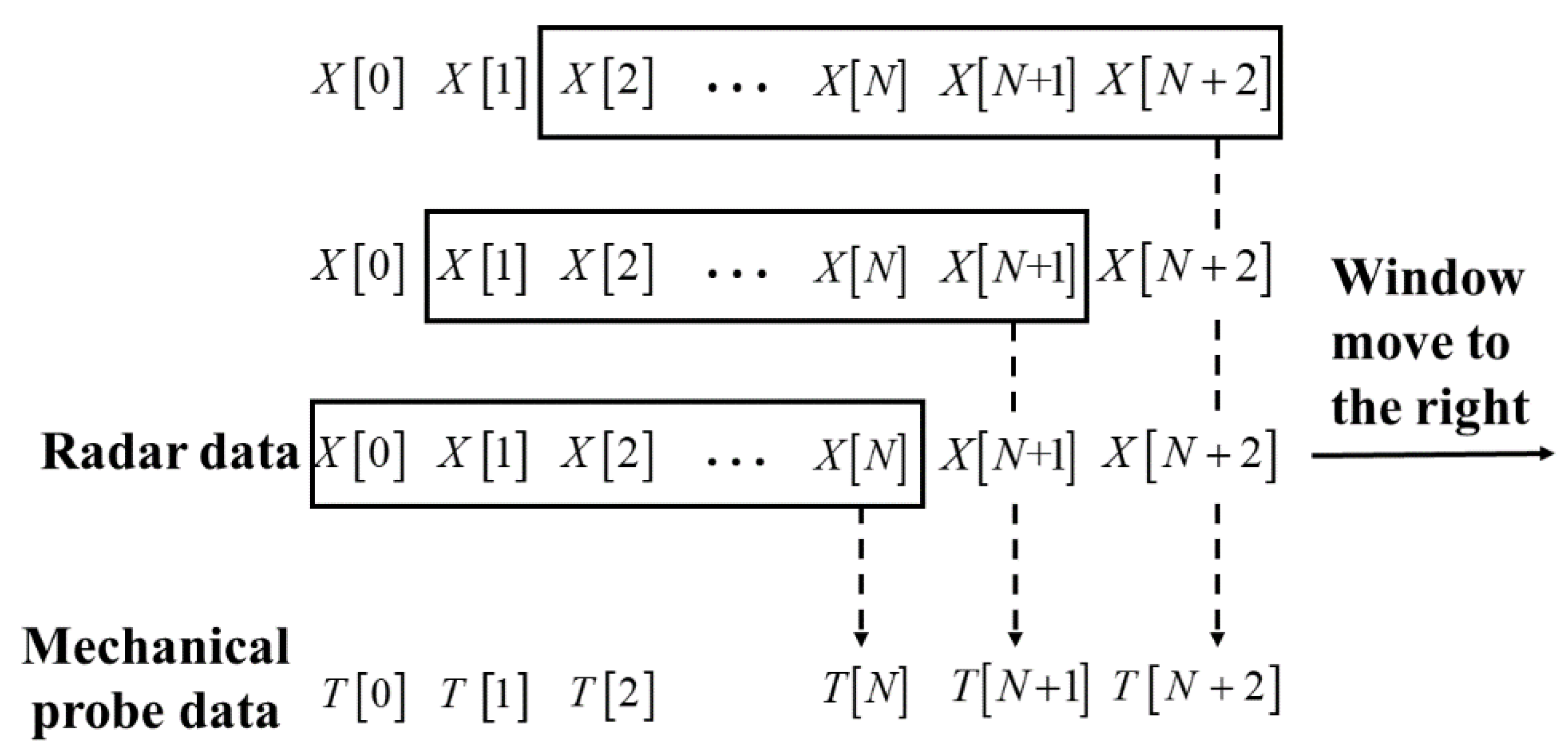
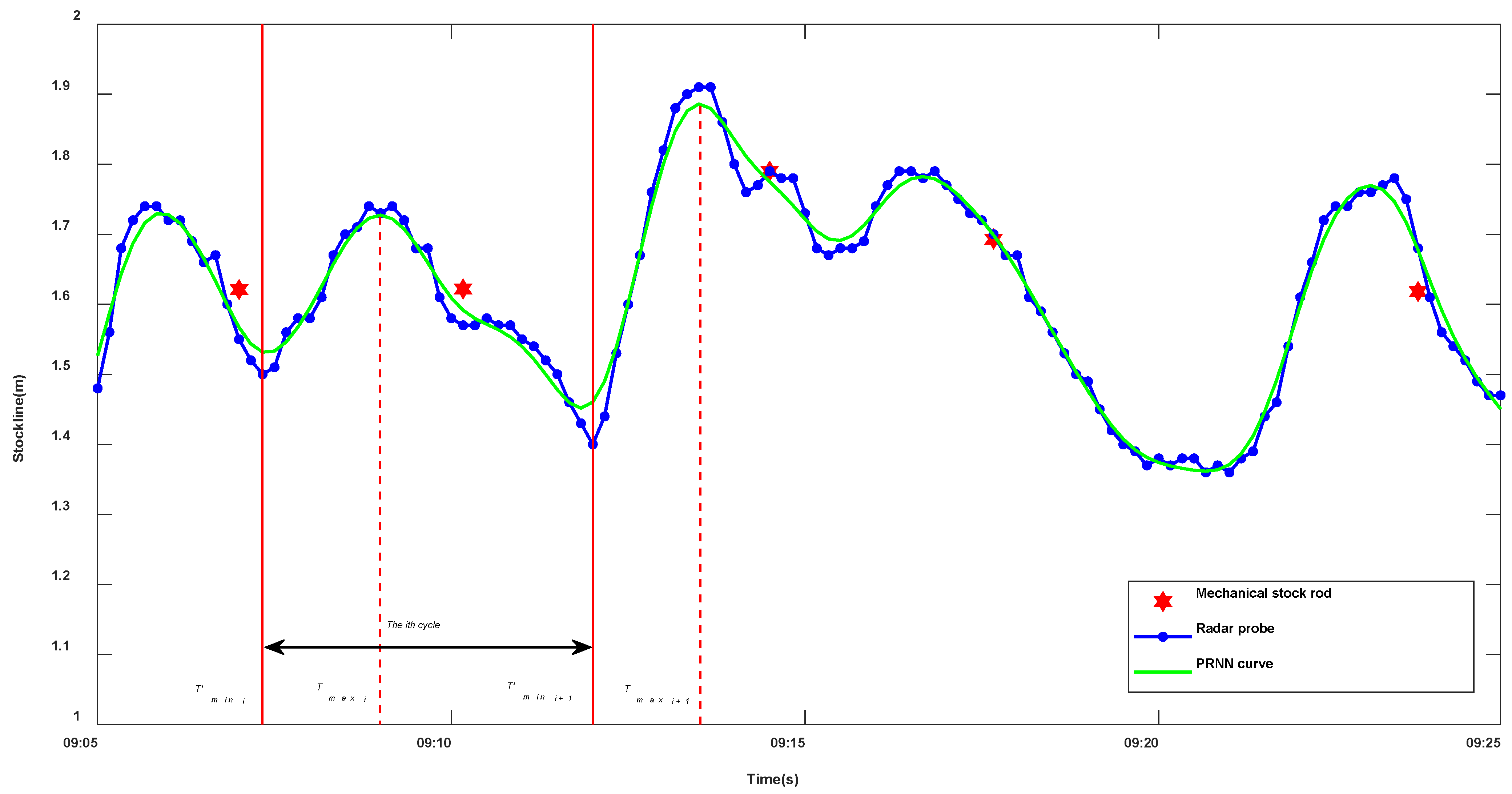
2.2. Space Feature Regression Model of the Radar Data
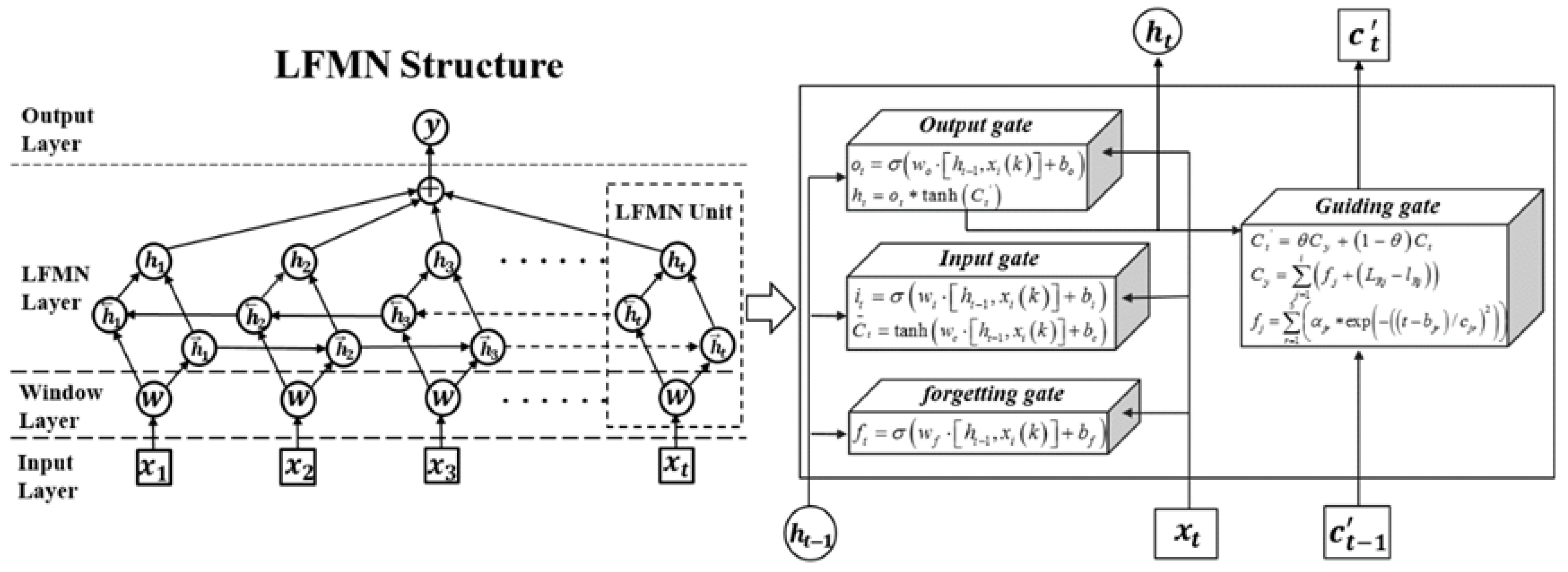
3. Time Dimensional Feature Extraction and Burden Level Prediction Based on Long-Term Focus Memory Network
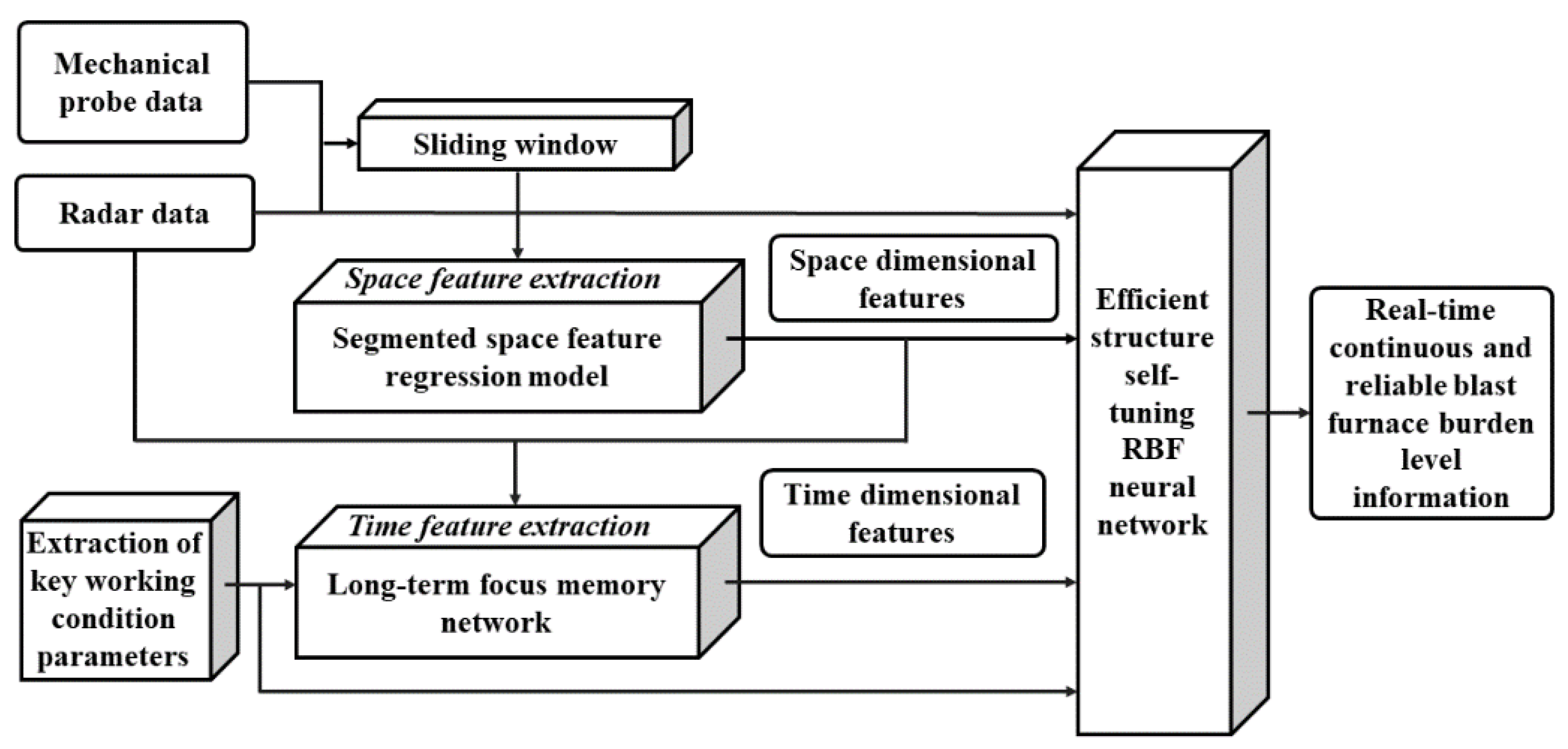
4. ESST-RBFNN
4.1. Fast Eigenvector Space Clustering Algorithm (ESC)
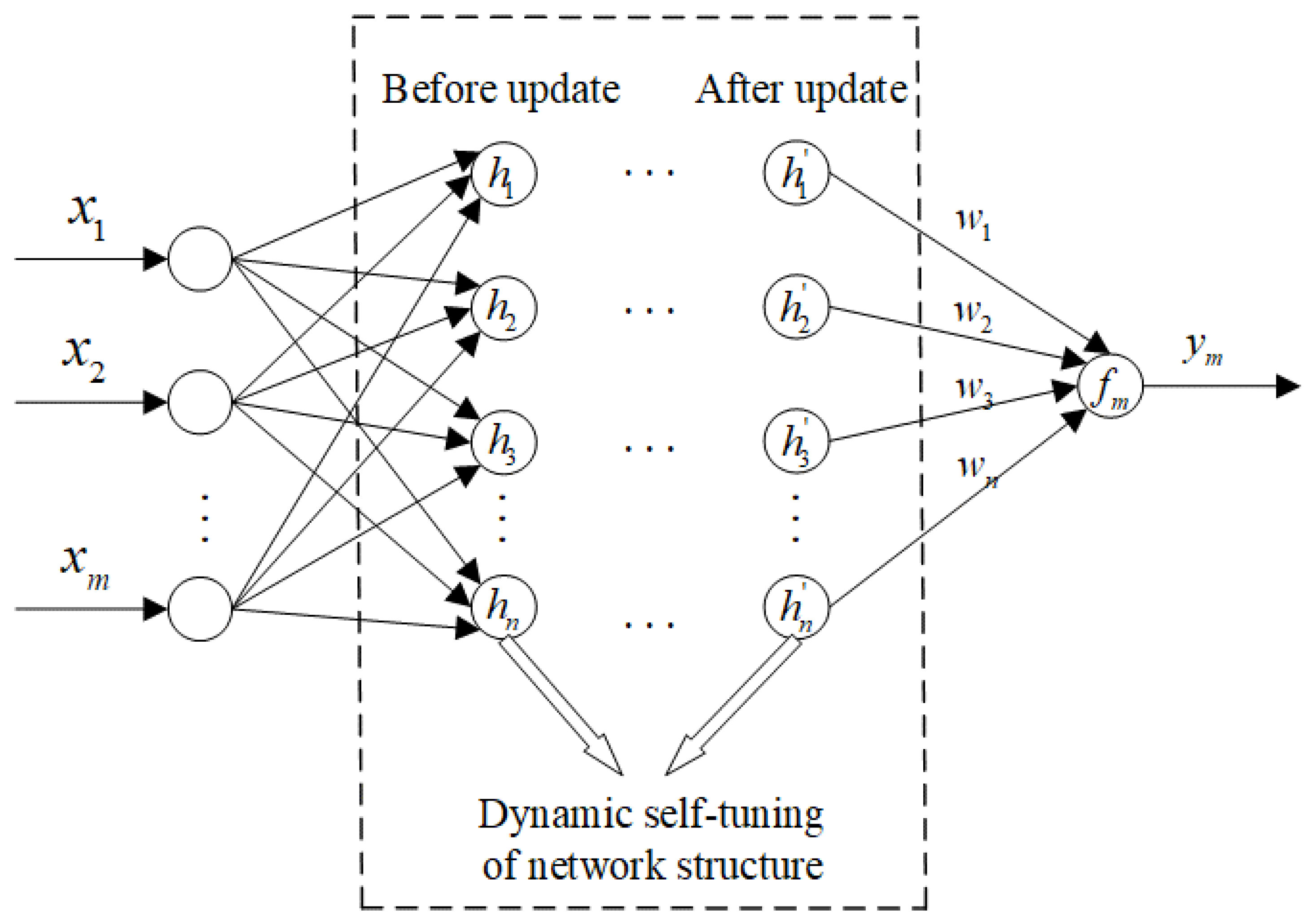
4.2. Efficient Structure Self-Tuning RBF Neural Network (ESST-RBFNN)
5. The Simulation and Industrial Verification Results
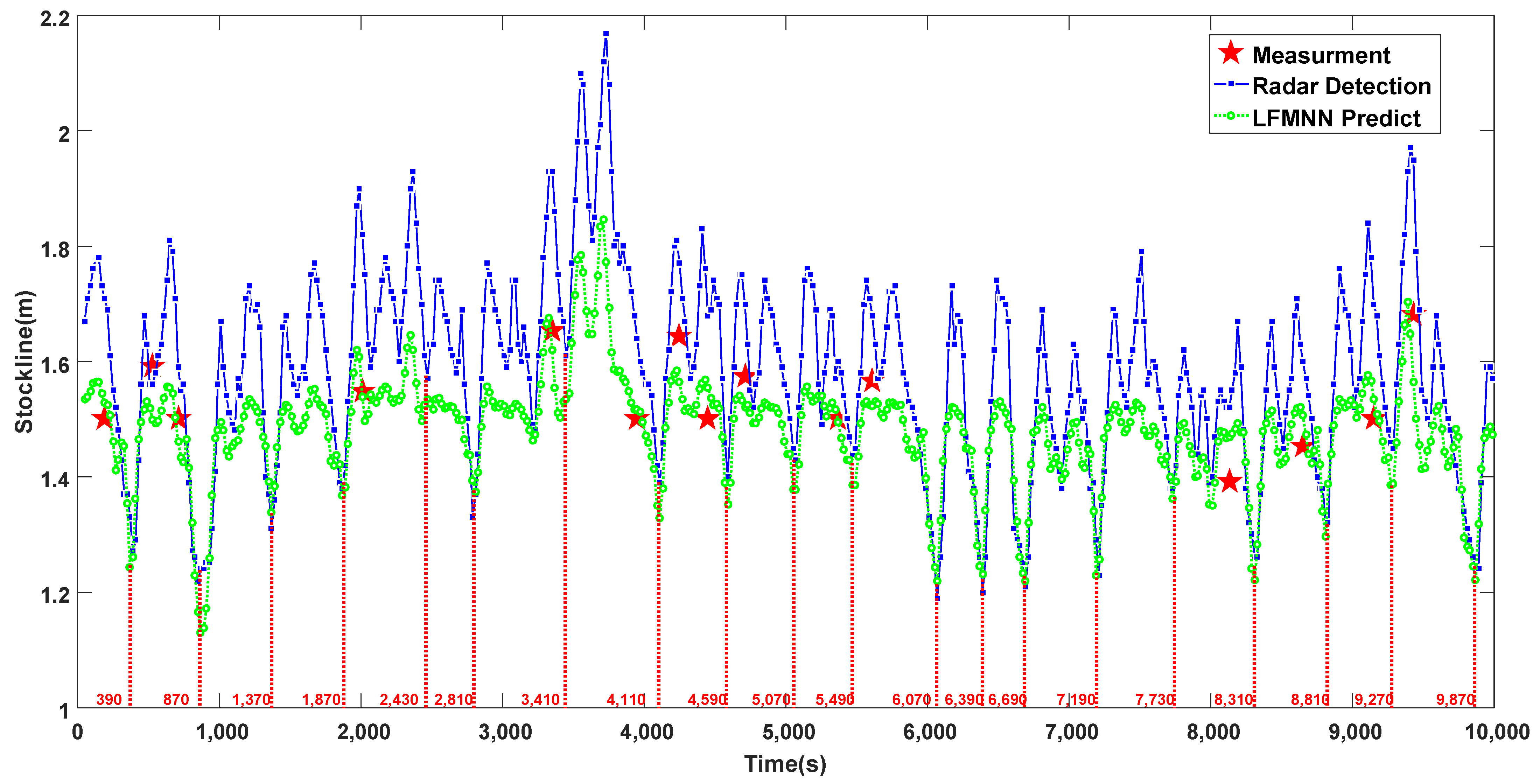
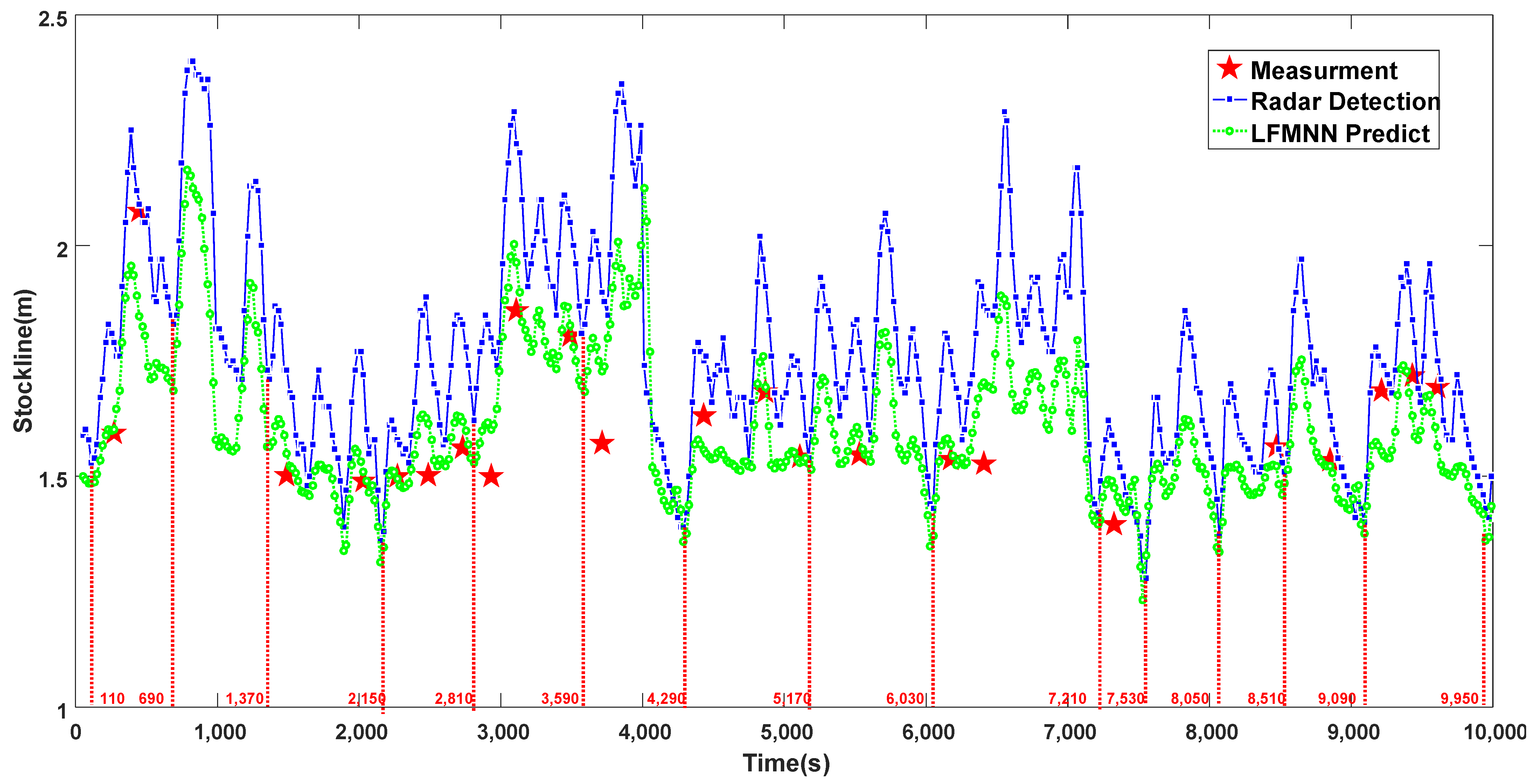
5.1. Verification Results of the Blast Furnaces Burden Level Prediction and the Time Features Attraction Based on LFMN
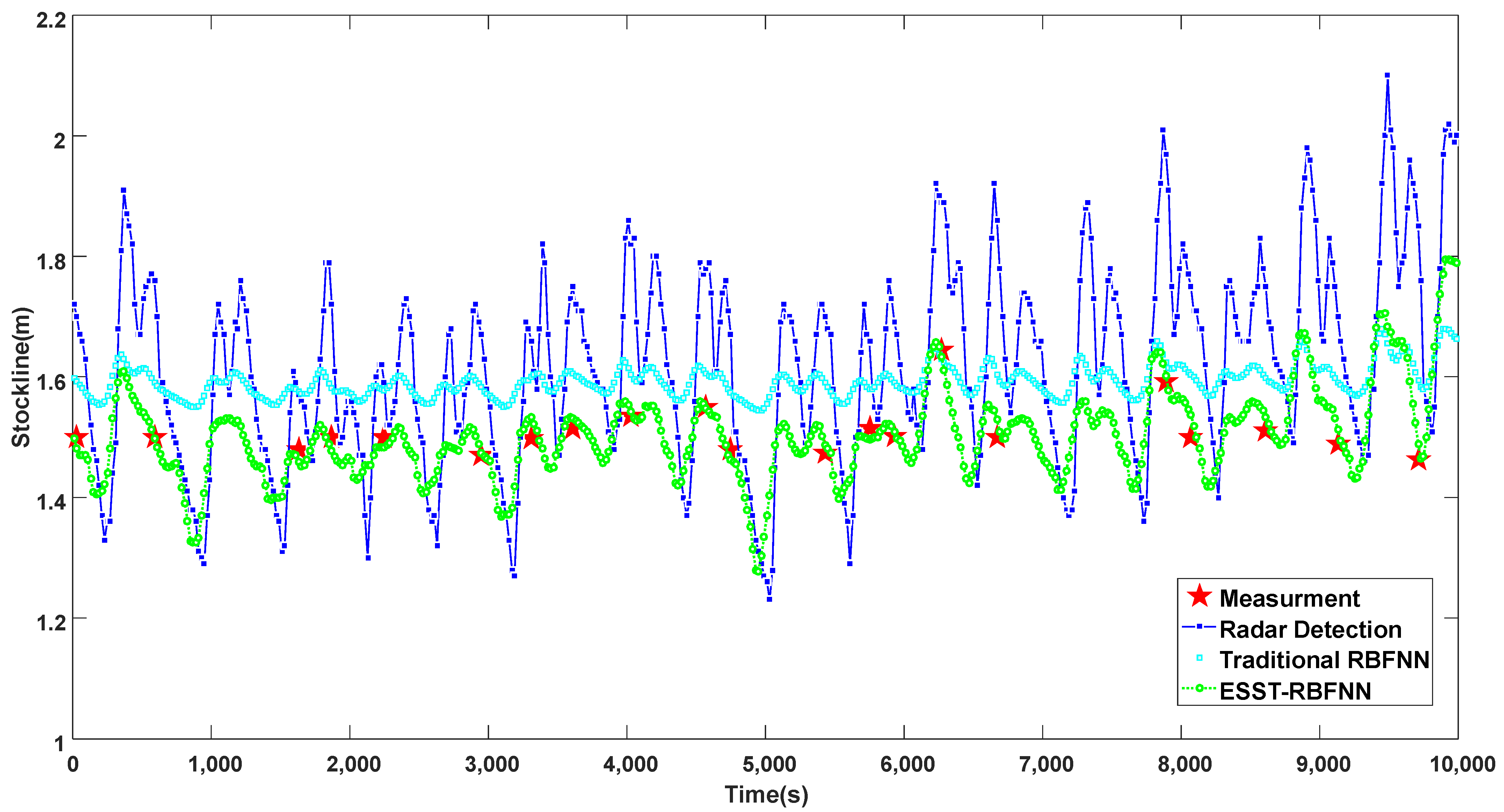
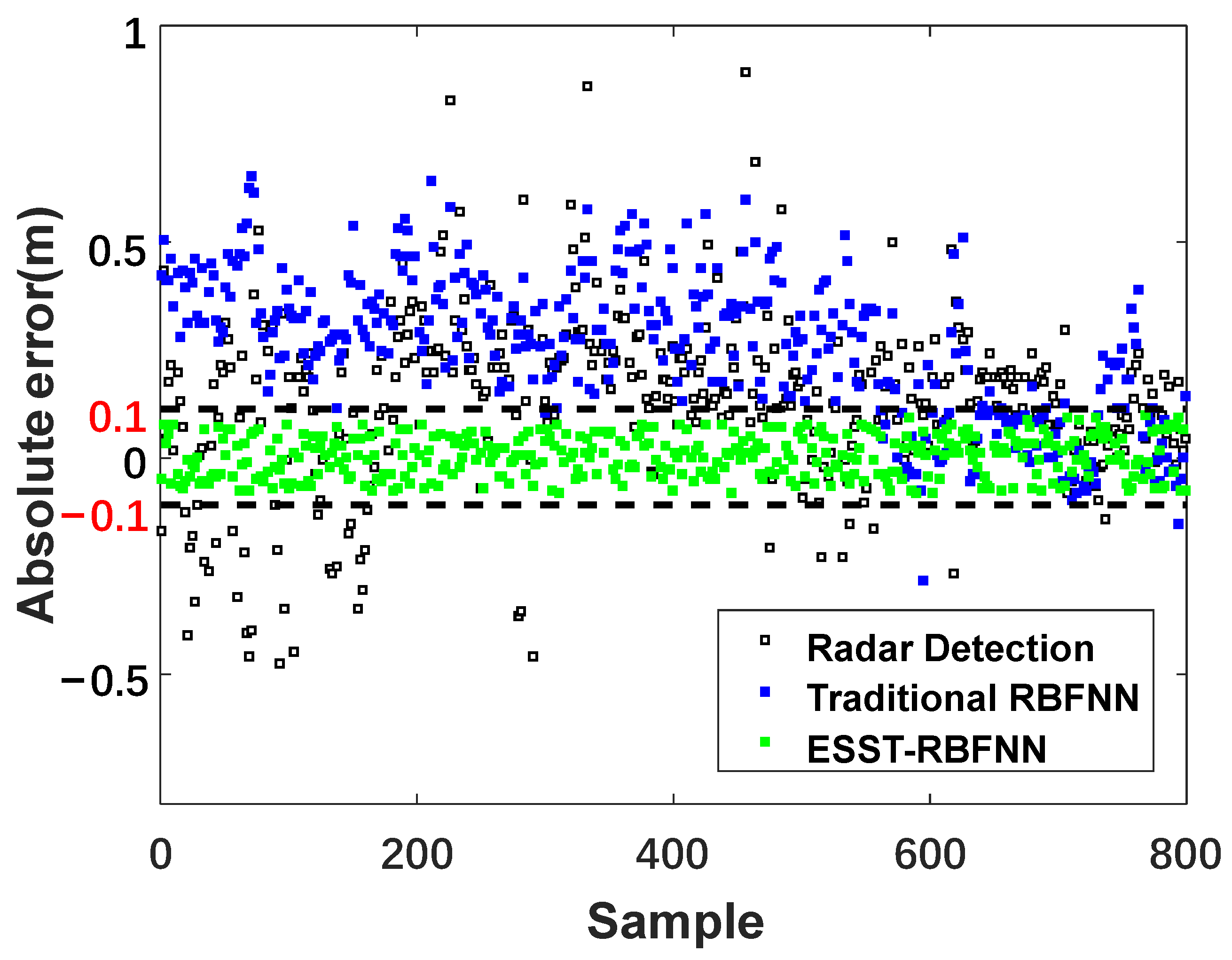
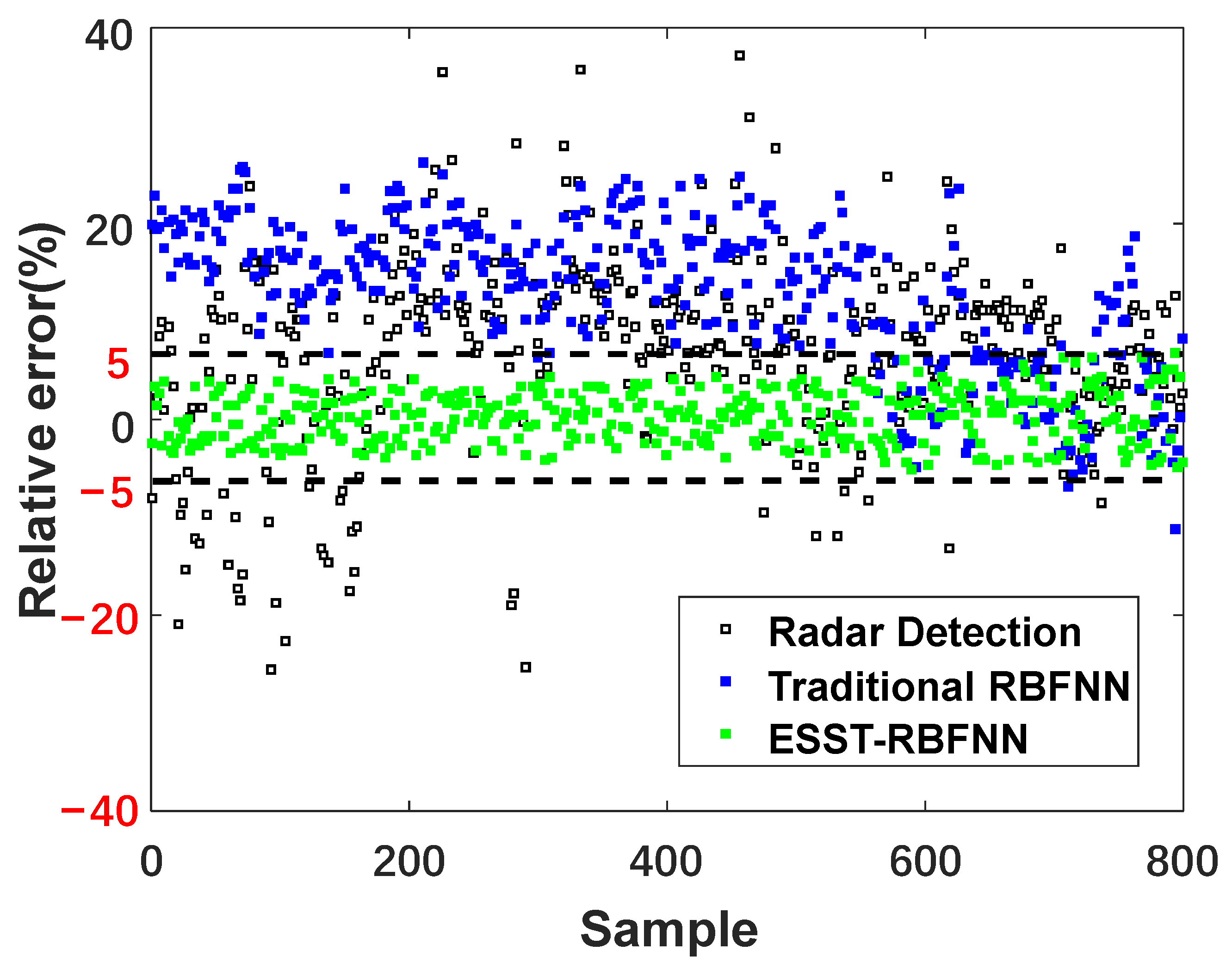
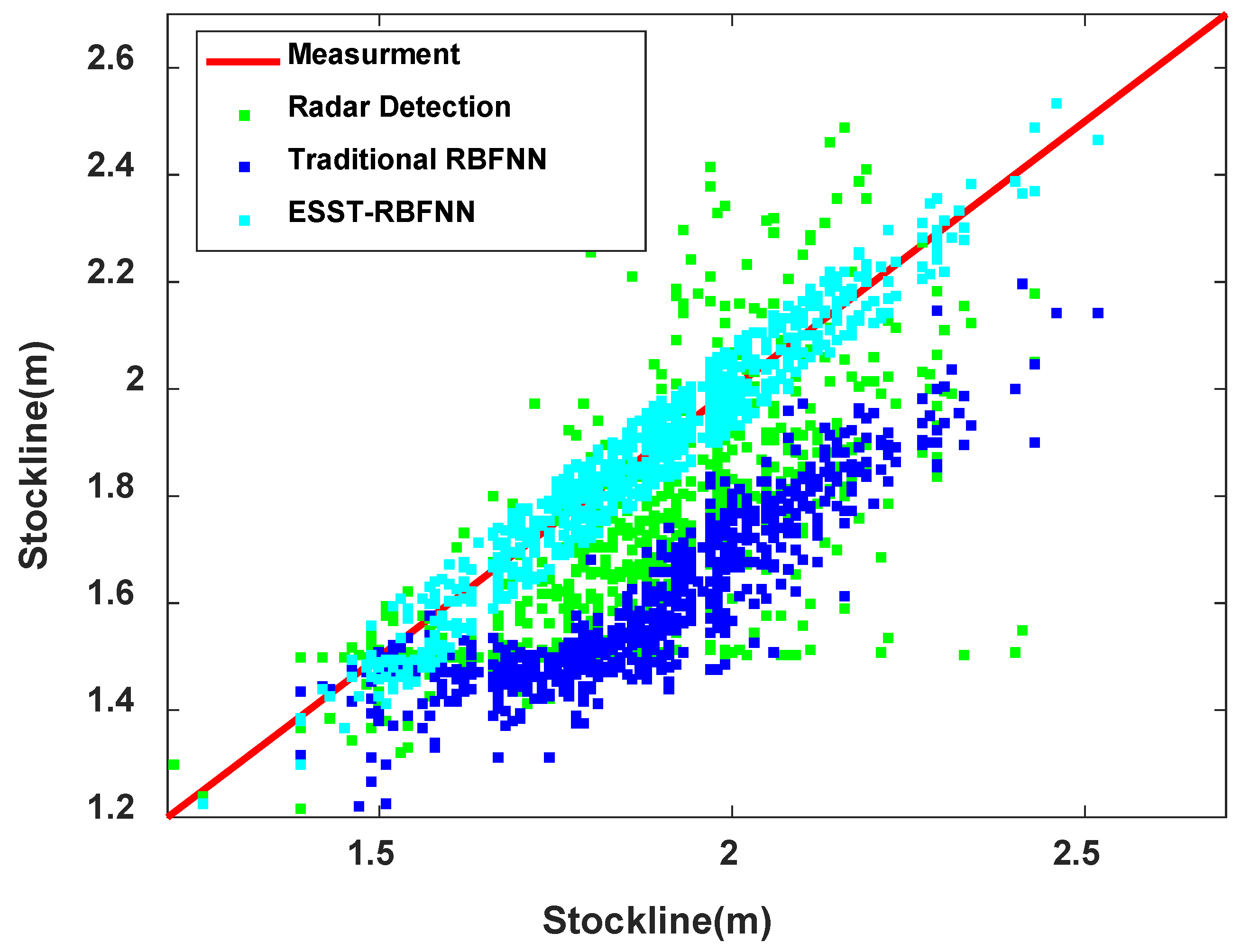
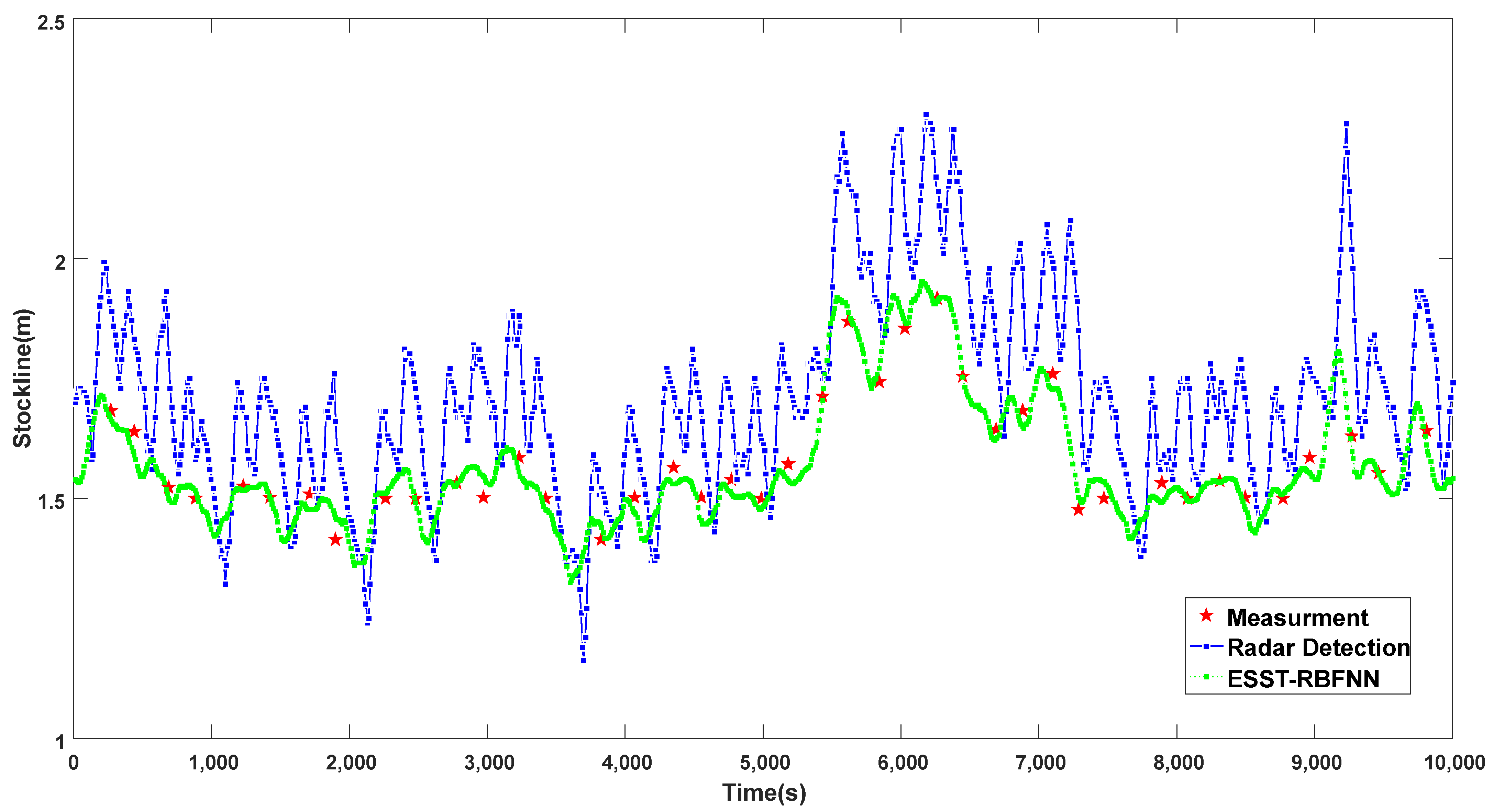
5.2. Verification Results of the Blast Furnace Burden Level Detection Based on ESST-RBFNN
6. Conclusions and Discussion
6.1. Conclusions
6.2. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Abbreviations | |
| PRNN | piecewise regression nonlinear |
| LFMN | long-term focus memory network |
| ESC | eigenvector space clustering |
| RBFNN | radial basis function neural network |
| ESST | efficient structure self-tuning |
| MRE | mean relative error |
| RMSE | root mean square error |
| Symbols | |
| time sequence of the radar data in a single period (-) | |
| piecewise nonlinear regression fitting of radar data ( ) | |
| the initial position ( ) | |
| falling speed of the burden level ( ) | |
| falling acceleration of the burden level ( ) | |
| falling jerk of the burden level ( ) | |
| input sample datasets (-) | |
| Categories (-) | |
| Centralized input data set (-) | |
| number of input sample in category (-) | |
| original indicator vector matrix of the category feature space (-) | |
| corresponding sample belonging to the category (-) | |
| transformation matrix (-) | |
| jerk changing rate of burden level ( ) | |
| high-order term of burden level ( ) | |
| beginning time of the th cycle ( ) | |
| ending time of the th cycle ( ) | |
| dividing time between feeding and idle period of th cycle ( ) | |
| measurement error ( ) | |
| burden level value in the falling period of the th cycle ( ) | |
| burden level value in the rising period of the th cycle ( ) | |
| input samples of LFMN network (-) | |
| opening material flow valve ( ) | |
| furnace top temperature ( ) | |
| furnace top air volume ( ) | |
| state variables saving the short-term memory of LFMN network (-) | |
| state variables saving the long-term focus memory of LFMN network (-) | |
| the weight matrix of forgetting gate in network training (-) | |
| the weight matrix of input gate in network training (-) | |
| the bias of the forgetting gate (-) | |
| the bias of the input gate (-) | |
| input sample set belonging to category (-) | |
| th output burden level data of the th cycle (-) | |
| width of the th basis function (-) | |
| maximum distance from clustering center to the sample point (-) | |
| network training set (-) | |
| training input sample set (-) | |
| real symmetric matrix (-) | |
References
- Mikhailova, U.V.; Kalugina, O.B.; Afanasyeva, M.V.; Konovalov, M.V. Development of Automated Control System of Blast-Furnace Melting Operation. In Proceedings of 2019 International Russian Automation Conference (RusAutoCon), Sochi, Russia, 8–14 September 2019; pp. 1–4. [Google Scholar]
- Gurin, I.A.; Spirin, N.A.; Lavrov, V.V. MES development for optimal distribution of fuel and energy resources in blast-furnace production. In Proceedings of 2017 International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM), St. Petersburg, Russia, 16–19 May 2017; pp. 1–6. [Google Scholar]
- Zhou, T.; Zhang, Z.-X.; Wu, Z.-X. Experimental Study on Low NOx Emission Using Blast Furnace Gas Reburning and Industrial Application in Stoker Boiler. In Proceedings of 2011 Second International Conference on Digital Manufacturing & Automation, Zhangjiajie, China, 5–7 August 2011; pp. 523–526. [Google Scholar]
- Gao, L.; Chen, H. Abnormal detection of blast furnace condition using PCA similarity and spectral clustering. In Proceedings of 2018 13th IEEE Conference on Industrial Electronics and Applications (ICIEA), Wuhan, China, 31 May–2 June 2018; pp. 2198–2203. [Google Scholar]
- Liu, X.; Liu, Y.; Zhang, M.; Chen, X.; Li, J. Improving stockline detection of Radar Sensor Array Systems in Blast Furnaces Using a Novel Encoder–Decoder Architecture. Sensors 2019, 19, 3470. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhang, R.X.; Cheng, Y.X.; Li, Y.; Zhou, D.D.; Cheng, S.S. Image-based flame detection and combustion analysis for blast furnace raceway. IEEE Trans. Instrum. Meas. 2019, 68, 1120–1131. [Google Scholar] [CrossRef]
- He, Z.K.; Yin, Y.H.; Zhang, S. Burden surface fitting and the design of simulation platform for the blast furnace burden distribution. In Proceedings of 2015 IEEE International Conference on Communication Problem-Solving (ICCP), Guilin, China, 16–18 October 2015; pp. 72–77. [Google Scholar]
- Ito, M.; Matsuzaki, S.; Kakiuchi, K.; Isobe, M.; Ishida, T.; Fujii, A.; Naito, M. Development of the visual information technique of blast furnace process data. In Proceedings of the 2004 IEEE International Conference on Control Applications, Taipei, Taiwan, 2–4 September 2004; pp. 884–889. [Google Scholar]
- Blencowe, M.P.; Buks, E. Quantum analysis of a linear dc SQUID mechanical displacement detector. Phys. Rev. B 2007, 76, 014511. [Google Scholar] [CrossRef] [Green Version]
- Fiorina, D. Novel Triple-GEM Mechanical Design for the CMS-ME0 Detector, Preliminary Performance and R&D Results. In Proceedings of 2020 IEEE Nuclear Science Symposium and Medical Imaging Conference (NSS/MIC), Boston, MA, USA, 31 October–7 November 2020; pp. 1–5. [Google Scholar]
- Li, Y.J.; Zhang, S.; Zhang, J.; Yin, Y.X.; Xiao, W.D.; Zhang, Z.Q. Data-driven multiobjective optimization for burden surface in blast furnace with feedback compensation. IEEE Trans. Ind. Inform. 2020, 16, 2233–2244. [Google Scholar] [CrossRef] [Green Version]
- Zhou, H.; Zhang, H.F.; Yang, C.J. Hybrid-Model-Based Intelligent Optimization of Ironmaking Process. IEEE Trans. Ind. Electron. 2020, 67, 2469–2479. [Google Scholar] [CrossRef]
- Du, Z.; Zhang, F.; Zhang, Z.; Yu, W. Radar Detector in Uncoordinated Communication Interference Plus Partially Homogeneous Clutter. IEEE Commun. Lett. 2021, 25, 1999–2003. [Google Scholar] [CrossRef]
- Coluccia, A.; Fascista, A.; Ricci, G. A KNN-Based Radar Detector for Coherent Targets in Non-Gaussian Noise. IEEE Signal Processing Lett. 2021, 28, 778–782. [Google Scholar] [CrossRef]
- Ma, Z.H. Control method and application of furnace top rod system based on S120 converter. Metall. Ind. Autom. 2015, 39, 68–71. [Google Scholar]
- Hinnel, J.; Saxén, H. Neural network model of burden layer formation dynamics in the blast furnace. ISIJ Int. 2001, 41, 142–150. [Google Scholar] [CrossRef] [Green Version]
- Schuster, S.; Zankl, D.; Scheiblhofer, S.; Feilmayr, C.; Reisinger, J.; Feger, R.; Stelzer, A.; Schmid, C. Massive MIMO Radar based Burden Surface Imaging: How mm-Wave Integrated Circuits Enable Optimization of Blast Furnace Charging. In Proceedings of 2020 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Linz, Austria, 23 November 2020; pp. 1–4. [Google Scholar]
- Zankl, D.; Schuster, D.; Feger, R.; Stelzer, A.; Scheiblhofer, S.; Schmid, C.M.; Ossberger, G.; Stegfellner, L.; Lengauer, G.; Feilmayr, C.; et al. BLASTDAR—A Large Radar Sensor Array System for Blast Furnace Burden Surface Imaging. IEEE Sensors J. 2015, 15, 5893–5909. [Google Scholar] [CrossRef]
- Ni, Z.M.; Chen, X.Z. Development of Blast Furnace Charge Level Imaging Technology and Application. Metall. Autom. 2022, 46, 34–45. [Google Scholar]
- Shi, Q.D.; Wu, J.X. A Blast Furnace Burden Surface Deep learning Detection System Based on Radar Spectrum Restructured by Entropy Weight. IEEE Sensors J. 2021, 21, 7928–7939. [Google Scholar] [CrossRef]
- Wang, H.; Li, W.; Zhang, T.; Li, J.; Chen, X. Learning-Based Key Points Estimation Method for Burden Surface Profile Detection in Blast Furnace. IEEE Sensors J. 2022, 22, 9589–9597. [Google Scholar] [CrossRef]
- Chen, Z.; Jiang, Z.H.; Yang, C.H.; Gui, W.H. Detection of Blast Furnace Stockline Based on a Spatial–Temporal Characteristic Cooperative Method. IEEE Trans. Instrum. Meas. 2021, 70, 1–13. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Statistical Indices | ||
|---|---|---|---|
| MRE | RMSE | Cycle-Fit | |
| Radar Probe | 7.182% | 0.176 | 99.53% |
| LFMN | 8.574% | 0.236 | 98.87% |
| Method | Statistical Indices | |||
|---|---|---|---|---|
| MRE | RMSE | Error-2% | Error-5% | |
| Radar | 8.573% | 0.1847 | 13.97% | 32.53% |
| RBFNN | 7.291% | 0.1825 | 28.91% | 66.50% |
| Proposed | 2.361% | 0.0480 | 91.17% | 99.33% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Chen, Z.; Gui, W.; Yang, C. Real-Time Detection and Short-Term Prediction of Blast Furnace Burden Level Based on Space-Time Fusion Features. Sensors 2022, 22, 5412. https://doi.org/10.3390/s22145412
Chen Y, Chen Z, Gui W, Yang C. Real-Time Detection and Short-Term Prediction of Blast Furnace Burden Level Based on Space-Time Fusion Features. Sensors. 2022; 22(14):5412. https://doi.org/10.3390/s22145412
Chicago/Turabian StyleChen, Yanli, Zhipeng Chen, Weihua Gui, and Chunhua Yang. 2022. "Real-Time Detection and Short-Term Prediction of Blast Furnace Burden Level Based on Space-Time Fusion Features" Sensors 22, no. 14: 5412. https://doi.org/10.3390/s22145412