1. Introduction
The use of outdoor positioning solutions using Global Navigation Satellite Systems (GNSS) technology, such as GPS, GALILEO or GLONASS, is commonplace. Their success lies in the fact that only one receiver (e.g., a cell phone) is needed to obtain the position. However, in closed places (buildings, tunnels, etc.) all of these systems fail, and are unable to obtain a position because the signal cannot penetrate the walls.
To obtain positioning in indoor environments, a technology different from GNSS is needed. Nevertheless, there is not currently an equivalent universal solution. However, in recent years, there has been important progress in many of the technologies used for indoor positioning, including Inertial Positioning [
1], Bluetooth [
2], Ultrasound [
3], Visible Light [
4], Wi-Fi [
5], etc. These technologies can be applied either individually or together, in what is known as sensor fusion [
6,
7]. In addition to these “classical” technologies for indoor positioning, promising approximations have recently appeared, such as 5G [
8] and Wi-Fi mmWave [
9]. Among these possibilities, Wi-Fi-based solutions are very popular, mainly because the infrastructure required for their deployment is already available everywhere, and if it is not, it can be implemented easily and cheaply. For this reason, there are a large number of items based on this technology and the number is growing all the time. In the last few years, there has been a significant increase in the application of machine learning models to enhance the accuracy of indoor positioning. This large volume of works requires a compilation, ordering, and classification of the results in order to assist researchers in selecting appropriate machine learning models for positioning purposes.
Thus, this work has two main contributions: (1) a review of papers published between 2016 and 2021 that use machine learning for indoor positioning, reporting information about the algorithms used, type of article (experimental/simulated), number of Access Point (AP) used, number of radio map reference points used, results obtained, type of signal used, and use or non-use of rooms in experiments; and (2) an analysis of how the main dataset, UJIindoorLoc, has been used in those papers along with the main drawbacks detected when using datasets. The selection of papers in this review was performed following the PRISMA guidelines [
10].
This article is an extension of a work presented at the 2021 International Conference on Indoor Positioning and Indoor Navigation (IPIN 2021) [
11]. Its novel contents include the following:
The current work extends the analyzed period to the last five years, analysing a total of 119 published research works, 57 more than in [
11];
An analysis of solutions based on Artificial Neural Networks (ANN), Suport Vector Machines (SVM), and Random Forest (RF) is included;
A comprehensive analysis of the most widely used public datasets (radio maps) and how they have been integrated in experiments performed by the research community;
A discussion of the size of the operational areas considered in experiments performed in the reviewed works;
Extended context, discussion, and conclusions.
The rest of this review is organized as follows.
Section 2 reviews the existing literature related to indoor positioning.
Section 3 describes the methodology used in this paper.
Section 4 presents the detailed results in the form of a table. The results of the table are analyzed in
Section 5. Finally,
Section 6 provides conclusions.
2. Related Work
There are many articles based on Wi-Fi and machine learning algorithms. We found several reviews on this issue, although they answer different questions than those addressed in the current work. For example, [
12] is a complete analysis of different indoor positioning articles, however, it is focused on collaborative positioning methods. Collaborative technologies rely on information exchange between different users and/or devices to improve overall performance. The main advantage of this method lies in its infrastructure, which there is less of than in other methods, as well as its low maintenance requirements. Positioning is based on the calculation of data from various sources, such as users and devices, and therefore the main drawback is the need for additional computational resources.
In [
13], the authors analyze different articles on indoor positioning; however, they do it at an individual level and do not show any classification or comparative table, although it is a good compilation of articles that use radio, light, or inertial technologies for indoor positioning.
Channel State Information (CSI) for positioning is the focus of the paper in [
14], a survey that provides many resources on CSI-based indoor localization methods and includes state-of-the-art algorithms and systems. The authors include a comparative table with fourteen articles using this technology, although only few parameters are analyzed.
Regarding Visible Light Communication for indoor positioning, [
15] provides a brief and useful review of ten papers that use machine learning algorithms and visible light solutions in their experiments.
In [
16], the authors provide a summary and in-depth analysis of all the wireless technologies used in the field of indoor positioning. Thus, the authors consider works based on the received signal (RSSI or CSI) as well as works that use data such as Time Of Flight (ToF), Angle of Arrival (AoA) or Phase of Arrival (PoA). Their paper includes a review of the different methods used to achieve positioning, such as fingerprinting, multilateration, and triangulation. Finally, they classify the most widely used Machine Learning algorithms and the methods used to filter the received signals. However, it is important to note that the paper is a review of the technologies used, and does not analyze the contributions to the state-of-the-art of every paper individually.
In a paper similar to the previous one, Obeidat et al. [
17] review systems not based on radio signals. Thus, the paper reviews positioning through any type of wireless signal as well as optical or magnetic solutions. The authors analyze the different algorithms and techniques used to achieve positioning; however, as in the previous article, they do not sort every paper individually.
Closer to the current review is [
18] a survey centered on machine learning algorithms. In this paper, the authors present a compilation of articles based on the application of machine learning algorithms applied to different indoor positioning solutions and classify them by the type of algorithm used. Finally, the authors make a comparative table in which readers can decide which type of algorithm to choose depending on their specific positioning needs (low computational cost, precision, etcetera).
An extensive survey of machine learning techniques for indoor localization and navigation systems is provided in [
19], including a deep analysis of all existing algorithms used in this field. The paper is focused on both the algorithms themselves and on different techniques to improve results while working with those algorithms (Data Preprocessing, Interpolating Missing Data, Filtering, etc…). The paper includes reviews of public datasets, performance evaluation parameters used, and other surveys.
Finally, Alhomayani et al. [
20] narrow the scope and review fingerprint solutions jointly with deep learning algorithms. Their classification is contains a compilation of the most widely used public Wi-Fi radio maps and a short analysis of every one. However, as in the reviews mentioned previously, their review focuses more on the analysis of the different elements involved in indoor positioning than on analyzing the individual items, which is the focus of the current work.
Thus, as can be seen, many previous works have analyzed how positioning can be achieved using Wi-Fi; nevertheless, there are no previous works, to the best of our knowledge, that have analyzed which machine learning techniques are used, how they are tested, and how much every technique is used. In addition, none of the previous works have analyzed how public datasets (or radio maps) have been integrated into third party research works.
3. Methodology
In this work, in order to analyze the use of machine learning in Wi-Fi solutions to obtain position, the methodology that has been followed is that of a systematic review based on the PRISMA [
10] guidelines. The three main steps of this methodology are: (1) to raise the research questions to set the objective of the review; (2) to look for the papers in the chosen digital databases that can answer the research questions; and (3) to establish a set of inclusion and exclusion criteria to finally keep only those papers that fit the research objective. These three steps drive the final selection of the articles that are part of this work.
The research questions are:
- RQ1.
Which machine learning algorithms provide the best results in Wi-Fi-based indoor positioning?
- RQ2.
What kind of Wi-Fi signal parameters provide the best results?
- RQ3.
What are the most commonly used metrics in indoor positioning studies?
- RQ4.
Are there substantial differences between simulated and experimental studies?
- RQ5.
Which public radio signal maps are the most commonly used in simulations?
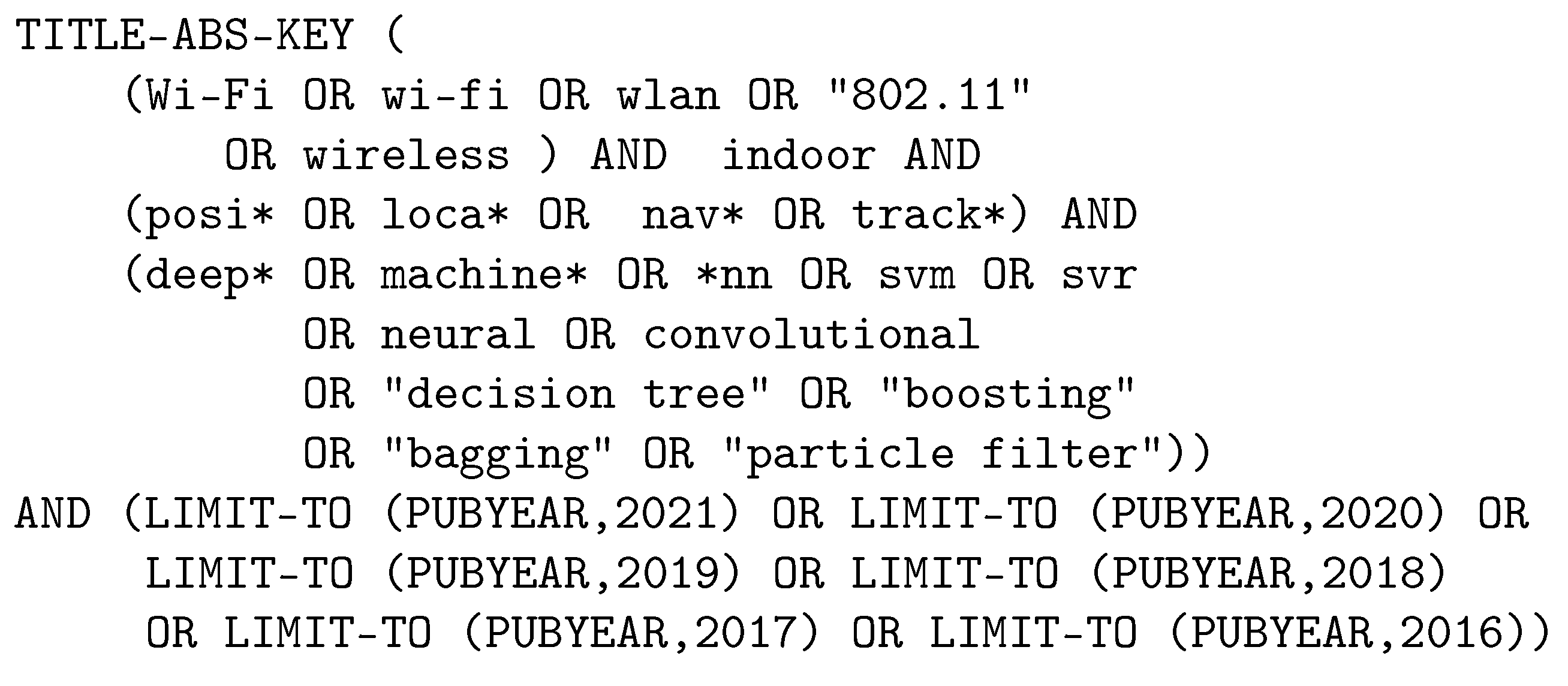
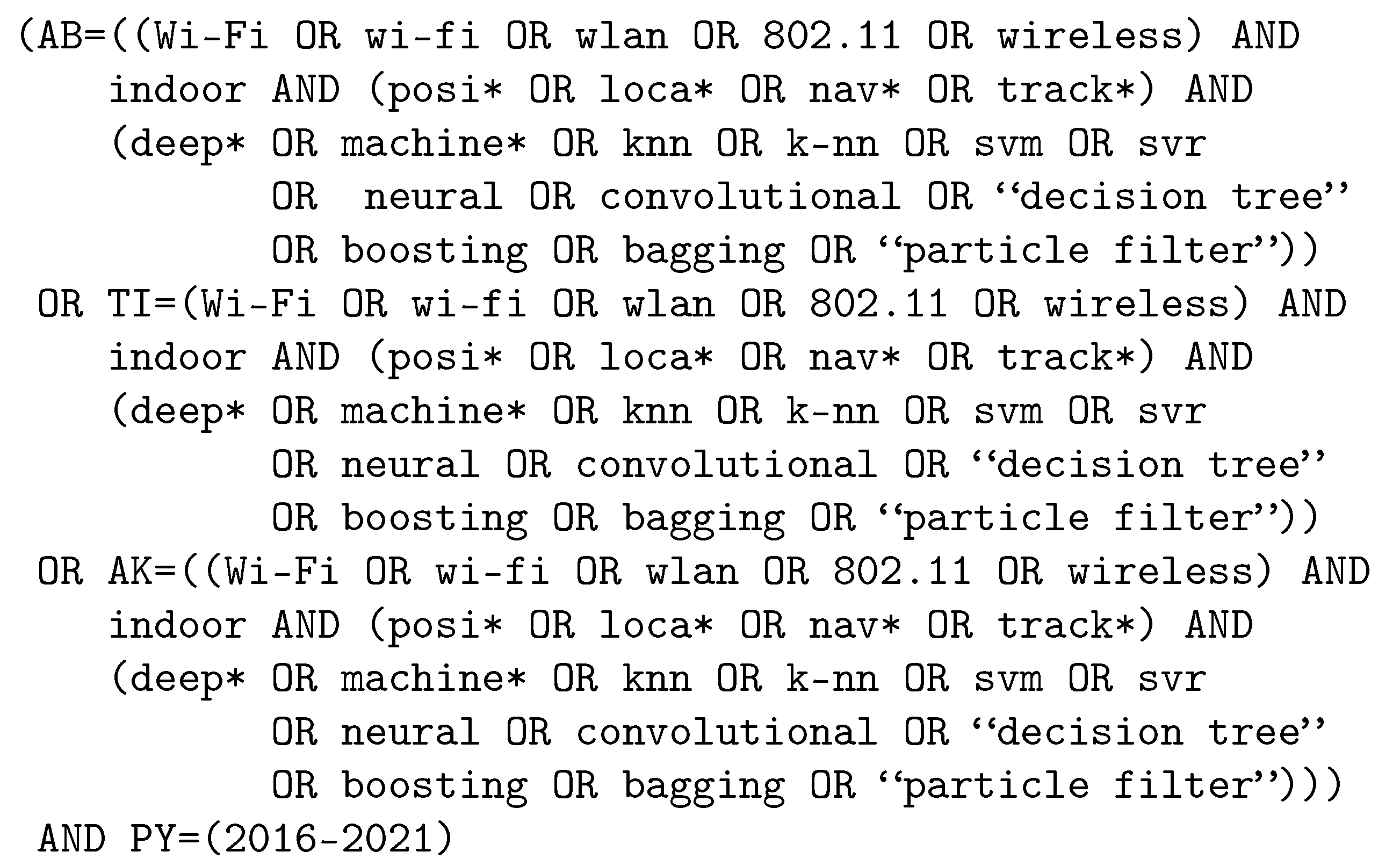
To perform queries, the
Web of Science and
Scopus databases have been chosen; these are reliable sources with sufficient content for an exhaustive review.
Figure 1 and
Figure 2 show the queries we have used to obtain the scientific papers in the two databases.
The inclusion criteria that selected papers must satisfy are:
- IC1.
Written in English
- IC2.
Coming from a conference or journal article
- IC3.
Dealing with Wi-Fi-based positioning
- IC4.
Positioning through Machine Learning algorithms
- IC5.
Published between 2016 to 2021
The exclusion criteria are:
- EC1.
Workshops and book chapters
- EC2.
Positioning that is not 100% Wi-Fi or is based on Sensor Fusion
- EC3.
Positioning that has part of the work outdoors
- EC4.
Positioning based on classic multilateration (TOA, AOA, etc.)
- EC5.
Positioning that uses a KNN-based algorithm or Particle Filter, as this is not considered Machine Learning
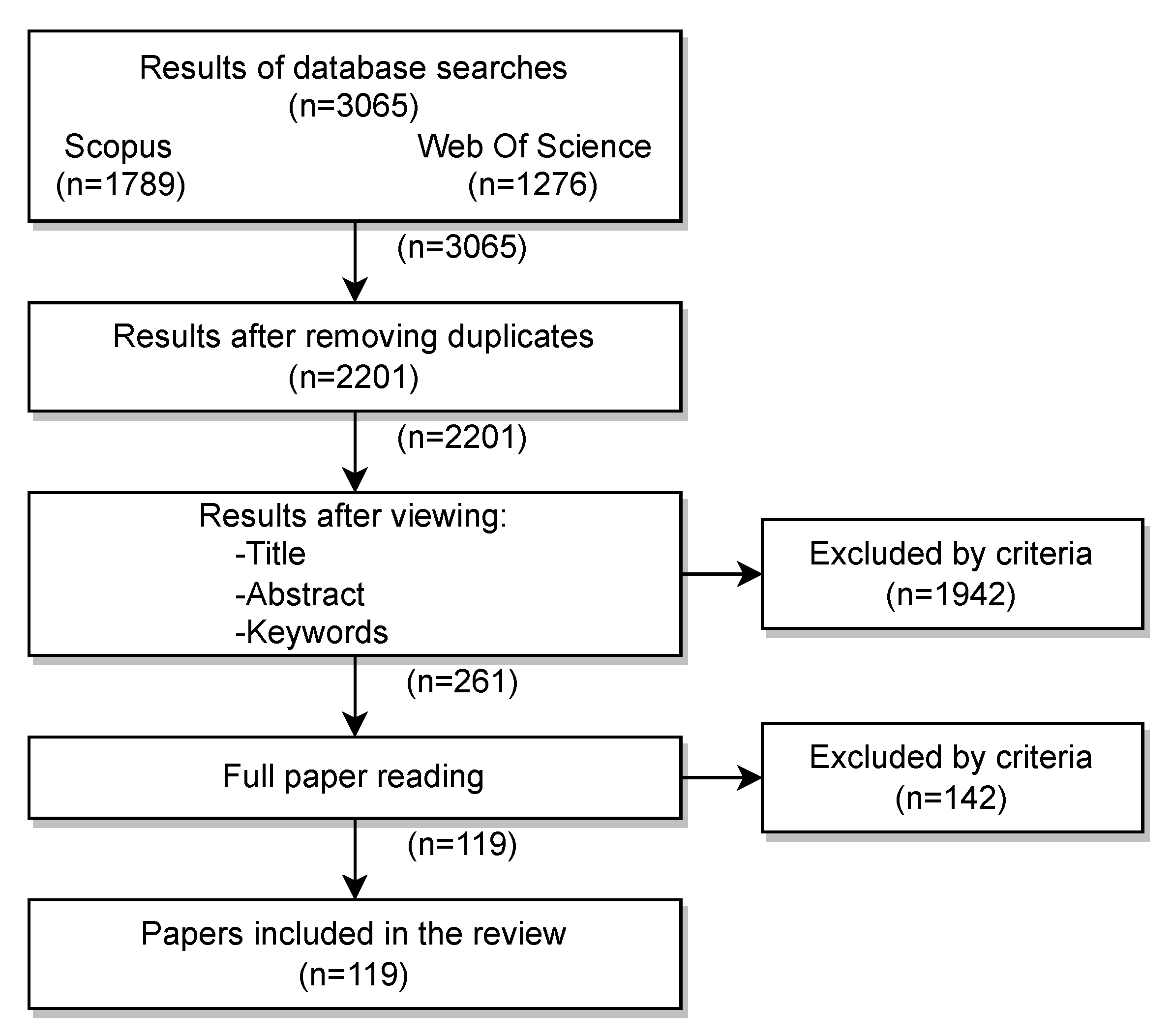
After the list of the papers had been obtained, the next step was to remove duplicates from all the results obtained from the two searches performed in
Web of Science and
Scopus. With the resulting articles, a first analysis of the title and abstract of each of them was carried out in order to rule out those which failed to meet the inclusion criteria or which met the exclusion criteria. Finally, a full reading was made of the included articles in order to verify whether they met the inclusion criteria. Those that were finally included were analyzed in answering the research questions. The diagram of the different results obtained in each step can be seen in
Figure 3.
As can be seen, the original number of papers, after removing duplicates, was 2201. After reviewing them, 119 satisfied the inclusion criteria, and thus are the papers analyzed in the current work.
4. Results
This section presents the results obtained after the analysis of the 119 papers included in this review. The features analyzed regarding the research questions are summarized in
Table A1,
Table A2,
Table A3 and
Table A4, which are included in the Appendix. It is important to note the following items:
Features not explained in the articles appear as .
Articles that include different experiments and/or simulations are grouped together.
Articles that do not display a clear metric are marked in the column oError (Other Errors).
Articles that are based on or use algorithms different from the main one are marked in the column sAlg (Secondary Algorithm)
The results shown in the tables are discussed and analyzed in the following section.
5. Discussion
In this section, we analyze the results from several points of view: the algorithms used, types of signals used, number of APs and reference points used, metrics, type of experimentation, and most commonly used radio maps.
5.1. Methods: Algorithms and Machine Learning Models
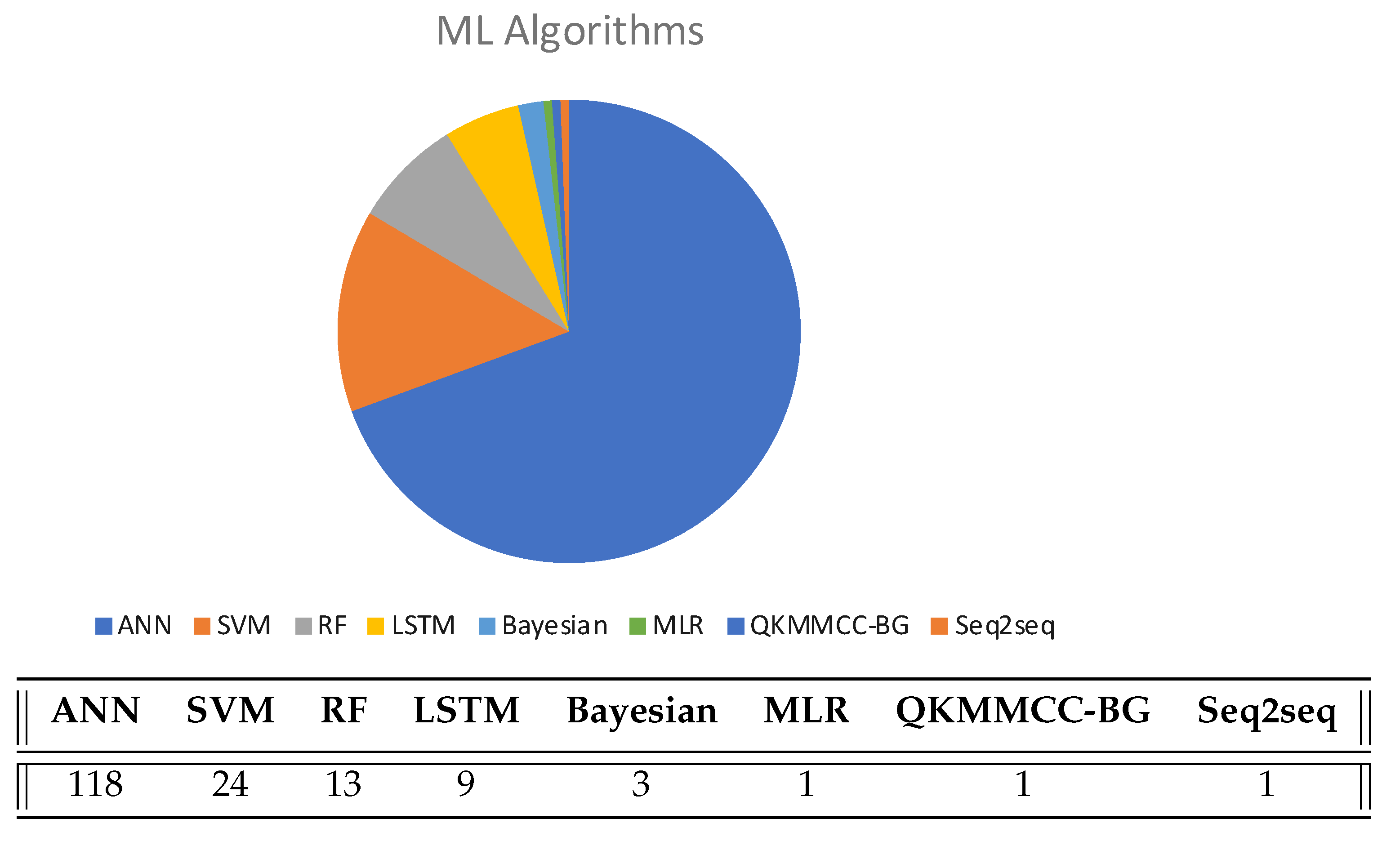
Figure 4 shows the distribution of algorithms. From these results it can be seen that the most commonly used algorithms are those based on ANN. Specifically, there are up to 118 works (around
of the total analyzed works) that use this machine learning model or any of its variants (Deep reinforcement learning (DRL), Extreme learning machine (ELM), Convolutional Neural Networks (CNN), Deep Neural Networks (DNN), Back-Propagation Neural Network (BPNN), Capsule Neural Network (CapsNet), Stacked Denoising Autoencoders (SDA), Variational Autoencoder (VAE), Deep Belief Network (DBN), Recurrent Neural Networks (RNN), Multilayer Perceptron (MLP), Neural Network (NN), Single Multiplicative Neuron (SMN), and Deep Q-Networks (DQN)). Neuronal network-based algorithms are specially appropriate for nonlinear functions, and the fluctuating signal type of Wi-Fi fits perfectly into them.
The number of solutions based on ANN has been growing in recent years. In fact, by the year 2021, 20 out of 24 articles used ANN. In addition, the best result in the analyzed papers (mean error of
) were obtained using a Deep Neural Network to process data from Wi-Fi mmWave signals [
9]. However, as we will see later, these results alone do not indicate anything, as factors such as the size of the test area, number of APs, etc. affect these results.
Several papers focus on combining different algorithms in order to choose the one that provides the best results in a particular case [
21,
22,
23], while other papers focus on processing data collected from APs [
24,
25,
26,
27]; finally, we found two papers [
28,
29] that relied on applying a double algorithm, one to approximate the location and another to detail it more precisely from the first approximation.
In the following subsections, we look more deeply into the specifications of NN, SVM, and RF.
5.1.1. Neural Networks
Neural networks are made up of layers of interconnected nodes. Their scheme essentially consists of an input layer, one or more hidden layers, and an output layer. During the training phase, the output is compared with the predicted result and the obtained error is calculated. This error is then propagated through the hidden layers and the weights of the nodes are modified in order to obtain better results. This process is repeated to improve accuracy.
In the articles we analyzed, there is no standard optimum configuration. Researchers perform different tests until they obtain a result that satisfies the two desired properties of accuracy and computation time. In [
30], the authors use six layers with 512 nodes in every layer to achieve an accuracy of 2.4 m. However, the authors of [
31] instead use only four layers, without specifying the number of nodes, while in [
32] only two layers of 50 nodes each are used.
Thus, there is no a standard configuration. Nevertheless, it is important to take into account the difficulty of finding an optimal configuration, as it is influenced by different variables, such as the type of scenario where the experiments are performed, its shape, whether or not there are obstacles, the number of APs used, etc.
5.1.2. Support Vector Machines
The class of algorithms called Suport Vector Machines (SVM) is based on projecting the results on a plane divided into two parts and grouping the results in one of the two parts. Thus, we are talking about a classifier algorithm. In the papers we analysed, we found several different versions of the SVM algorithm. Ref. [
33] shows an M-LS-SVM algorithm, which is characterized by the use of linear functions instead of the quadratic functions of the original SVM; the authors obtained an accuracy of 2.7 m. However, [
34] used the SVM algorithm directly, obtaining an accuracy of 0.7 m in a similar scenario, and [
35] used a SVM algorithm with CSI instead of Received Signal Strength Indicator (RSSI) and obtained an accuracy of 1.909 m in a simpler scenario with no rooms or obstacles.
5.1.3. Random Forest
Random Forest (RF) algorithms are based on the construction of a large number of decision trees to create a learning model. Each decision tree decides a class and the most common class ends up being the final prediction of the model. Its use in indoor positioning has been decreasing, and in the year 2021 no articles were detected that used it. In 2020, there were only three articles that used it, and none of these used scenarios with obstacles to perform the experiments.
The best accuracy found with RF is
, from Maung et al. [
36] in 2020, in a space of
. However, in 2018 the authors of [
37] claimed an accuracy of
in a space
, and the authors of [
38] obtained an accuracy of
in a space of
. From these results it seems that RF is an algorithm suitable for small spaces.
5.1.4. Comparison of Models
The use of one algorithm or another is determined by different factors, such as computational resources, the amount of data to process, and the type of infrastructure (rooms, tables, walls…) where a fingerprinting-based system is to be implemented.
If we focus on computational resources, RF requires fewer resources than SVM algorithms. In fact, SVM-based algorithms tend to be almost unusable on large datasets because the training complexity of SVM is highly dependent on the size of dataset used.
At the level of infrastructure complexity, the situation is similar. SVM algorithms work very well for mitigating the NLOS of signals; therefore, they are ideal in small and complex sites. On the other hand, NNs are more configurable, and their usage can be adjusted for better performance based on lower precision. If not much precision is needed and speed is preferable, the number of nodes and neurons involved in the network can be adjusted [
39].
In the case of large spaces, RFs have an advantage over SVMs, because these algorithms are appropriate on models that have been clustered, which is helpful in large scenarios. It is important to note that RFs are Decision Trees optimized to work with large amounts of data. ANNs are particularly suitable in situations where there is noise and multipath propagation, as well as where there are a large number of APs [
18].
In summary, in small spaces and with little computational capacity SVM is the best option, while in complex situations and with large datasets, RF and NN are more complex to implement; however, they are more adaptable due to their great configuration capacity.
5.2. Types of Wi-Fi Signal Parameters Used
The most commonly used indoor positioning parameter is based on the RSSI; 114 of the reviewed works used RSSI. The second most used Wi-Fi signal is CSI, which was used by 15 papers.
Wi-Fi is available in many indoor spaces nowadays and is an easily accessible parameter from any device, including mobile and wearable devices. In general, the results obtained with RSSI have an accuracy between 1 and 8 m.
Nevertheless, these apparent good results can be due to the design of the experiments; therefore, these accuracies cannot be generalized or expected in different environments. The elements that drive to these accuracies can be, among others: (1) experiments with small spaces without obstacles and with many reference points, thus avoiding the effect of signal loss when passing through walls and the multipath effect (as explained in [
40]); or (2) experiments that use training and validation data with little difference in terms of time and space, or using the data used for training for validation, as in [
41].
On the other hand, there are 15 studies that use CSI [
32,
35,
42,
43,
44,
45,
46,
47,
48,
49,
50,
51,
52,
53] from a Wi-Fi signal, generally with better results in terms of accuracy than those obtained with RSSI. CSI is not widely used because the channel state information is not easy to obtain and requires specific network cards and modifications to the original
firmware [
52] (i.e., it cannot be used in smartphones). Despite this, we observed a large increase in the use of this parameter. Before the year 2020, only four papers used this parameter. However, in the last two years up to ten papers have used it, as can be seen in
Figure 5. One reason for this may be that the RSSI parameter is reaching its limits, and new mechanisms are being explored as they are becoming more present in common everyday devices.
Finally, the Signal-to-Noise Ratio (SNR) parameter is beginning to be used, specifically in two papers [
9,
54], and in particular in combination with Wi-Fi networks that use
mmWave instead of the classical networks that broadcast on traditional frequency channels, i.e.,
and 5
. SNR technologies show better positioning accuracy, and led to the best and the third-best results we found in this review.
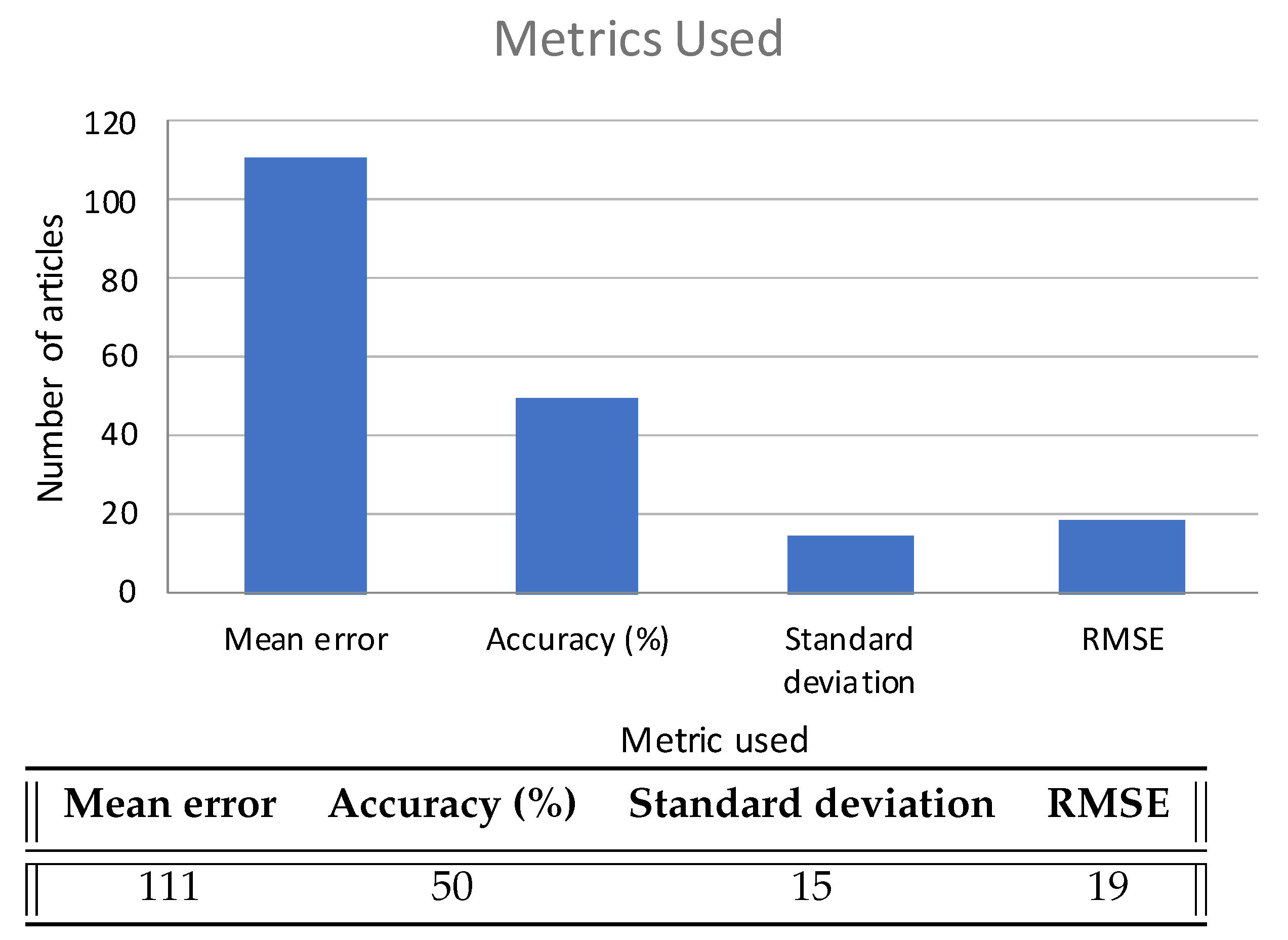
5.3. Evaluation Metrics
In order to compare works among themselves, a common evaluation metric is needed. Most works report their results in terms of the average positioning error in different evaluation points, which is the positioning error defined as the Euclidean distance between the actual and estimated positions (
Mean Error on the table). Among these, most report the Root Mean Squared Error (RMSE) as well. Other metrics used are the Mean Squared Error (MSE) and the Median Error. Another important metric is the percentage, which is used in one way or another in 36 papers [
22,
24,
25,
55,
56,
57,
58,
59,
60,
61,
62,
63,
64,
65]. Unfortunately, two articles do not show their results clearly; papers [
66,
67] only show a graph, however, it is difficult to determine the obtained results from the image.
In analyzing those papers that use metrics recommended by ISO/IEC 18305 [
68] (the standard methodology to evaluate indoor localization systems), it can be seen that all of the articles (except those that do not show results) comply with this standard, specifically, mean error, accuracy in one zone or floor, root mean square error, and standard deviation.
Figure 6 shows how many papers used each metric.
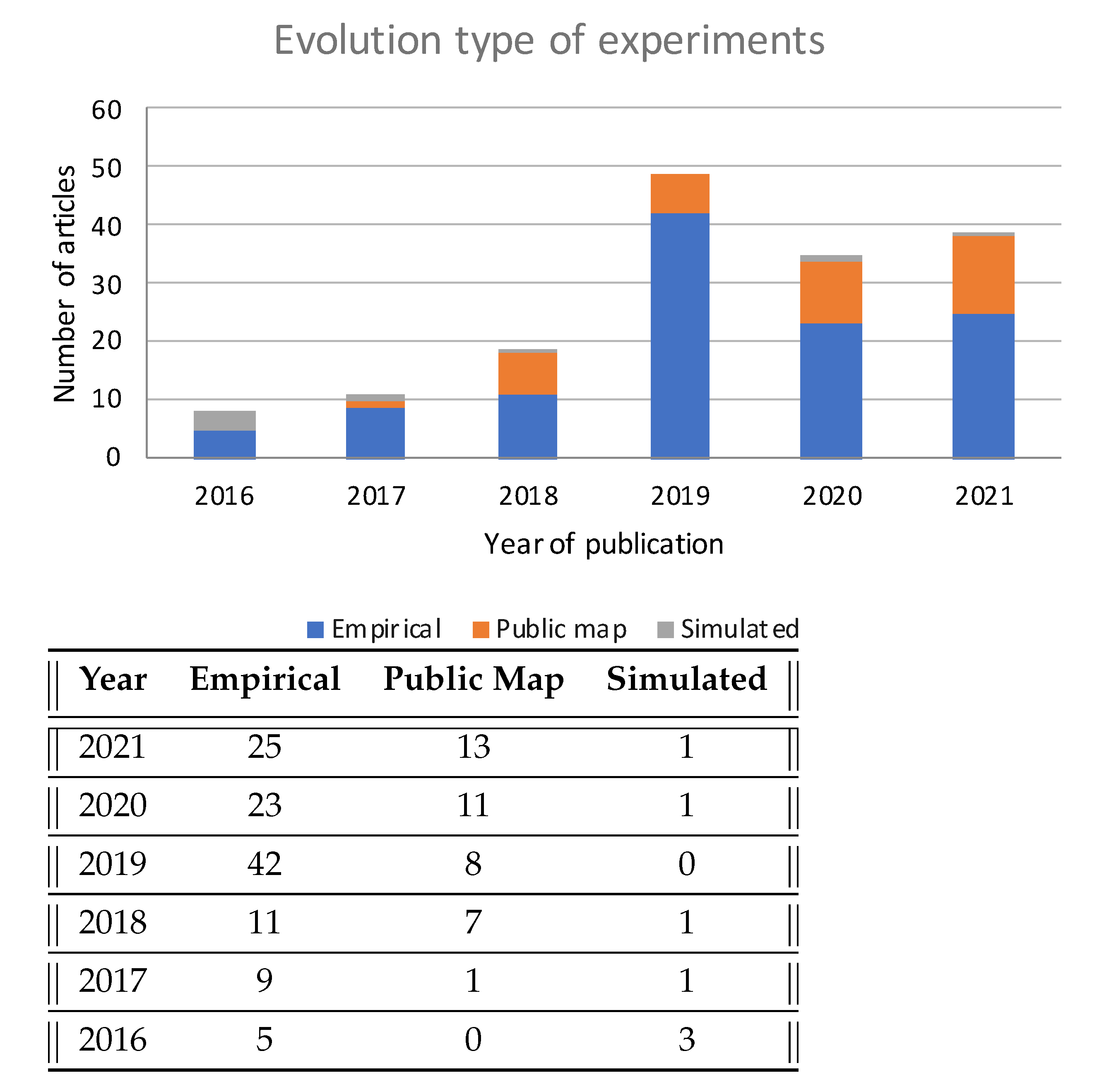
5.4. Experimental and Full Simulated Results
Regarding whether results were obtained experimentally or via simulation, we found seven papers that presented results from full simulations (with artificially generated data), 40 using public datasets, and 114 that presented empirical results (note that there were articles that perform several experiments and/or simulations).
Four of the papers reporting results based on simulations performed real-world experiments as well [
29,
45,
69,
70]. While the authors in [
69,
70] implemented a simple Log-Distance Path Loss (LDPL) model to generate the RSSI values, Ezzati Khatab et al. [
45] included a wall attenuation factor to better model the radio propagation with the LDPL model under Non-Line-of-Sight (NLOS) conditions. In contrast to these, Bai et al. [
29] used a more sophisticated Ray Tracing model to generate the RSSI values.
In any event, the results reported in simulations tend to be better than the ones reported in the real-world experiments performed in those papers that performed experiments in both scenarios. Those simulations assuming that Line-of-Sight (LOS) conditions are always met, included a low Gaussian noise, or implemented a simple model, represent an optimistic view of real-world evaluation in one way or another, and therefore the results may be much better in terms of positioning error. This is the case, for instance, in Zhang et al. [
70], where the errors in the simulation are
–
better than those reported in the real-world experiment.
The empirical results reported are usually better than those obtained with public datasets. There are several reasons for this behavior. In general, researchers have much more knowledge about their own testing areas than those external areas included in public datasets, which impact the selection of the algorithm and its hyperparameters. Performing the experiments in their own facilities enables researchers to select an optimal sub-area for evaluation (e.g., the one with better Wi-Fi coverage or higher density of APs), have custom deployment of APs, or even add additional supporting infrastructure in the operational area. Therefore, public datasets are a more challenging testing scenario for algorithms; in addition, they allow for comparing different algorithms, as they are tested in the same area. Thus, it is important to note the increase in the number of papers that used public datasets in recent years, as can be seen in
Figure 7.
5.5. Most Widely Used Public Datasets
Of the experiments reported from 2016, were performed on public datasets; in 2021 this percentage rises to , most likely due to the COVID-19 pandemic, although up to six papers from these years do not indicate what type of radio map they used. Thanks to these public datasets, researchers were able to provide useful results while continuing to perform experiments during the pandemic. In addition, these public datasets play a key role in research, as they allow researchers to compare different algorithms tested with the same data.
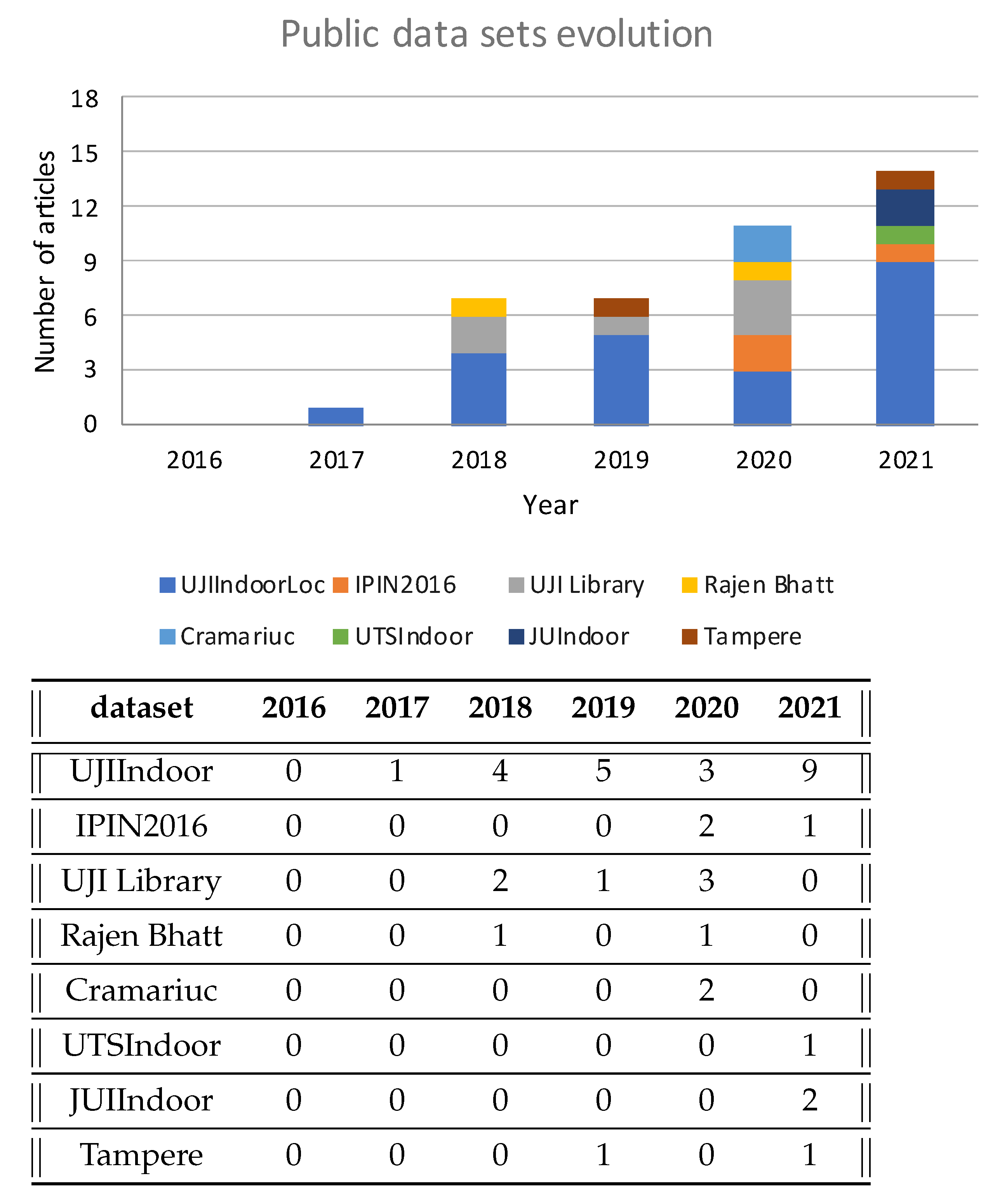
In the list, the most commonly used public signal map is UJIIndoorLoc [
71] in all its variants (different buildings, any floor). It appears in 23 papers, and is clearly the most important, especially in the last two years, when the rest of the maps we found appear only once.
Other radio-maps used are IPIN2016 [
72], UTSIndoorLoc [
73], JUIndoorLoc [
74], Rajen Bhatt [
75], Cramariuc [
76], Alcala Tutorial 2017 (included in UJIIndoor), WIFINE [
77], UJI Library [
78], and Tampere [
79]. In
Table 1 we provide a summary of different attributes of the public datasets used, while
Figure 8 shows the evolution of the use of different public datasets over the years. Note that before 2017 there were no public datasets that met the necessary conditions to be used in simulations, thus, we must recognize the recent contribution of these datasets to this field of research.
Because UJIindoorLoc is the most widely used dataset, we performed a deeper analysis into how it has been used by researchers.
UJIIndoor Results Analysis
Due to the large number of articles that performed their tests with UJIIndoorLoc, it is useful to provide a comparison of the different algorithms used on this dataset; results without the mean error have been omitted.
Table 2 shows the main papers that used the UJIIndoorLoc dataset.
In analysing these papers, we detected different strategies in researchers’ methods of treating the original UJIIndoor data, resulting in a mean positioning error much below the baseline. From this analysis, we can conclude that the best result obtained by correctly using training and testing from UJIIndoorLoc is [
84], with a mean error of
.
Despite other works reporting lower positioning error results, these results cannot be directly compared to the baseline as their evaluation was restricted to a small area within the full operational area (a building and/or a floor) and/or the evaluation data contained samples from the original training set, as we show in the following paragraphs. In [
41], the author separates the multi-floor and single-floor data to treat them independently, then, from the same dataset, separates 80% for training and 20% for testing. This method can lead to better results, as it is very likely that data taken at almost the same time can be in both the training and test sets. On the contrary, in [
80], the authors use the validation component (1111 samples) of the dataset as the test set. The training portion of the dataset is split into training (15,950 samples) and validation (3987 samples) subsets based on an 80:20 split. This is a good practice, as the authors do not mix training and test data.
In [
82], the authors selected a subset of the original dataset. In this case, the authors focus on data from only one part of the dataset (building 0) and only choose the strongest RSSI signals. Literally, “In particular, the Building 0 from UJIIndoorLoc dataset is chosen to evaluate EdgeLoc and the top-40 APs (out of a total 520 APs) are selected.” Although AP selection can be performed as an optimisation step in this method, restricting evaluation to just one building makes the results not directly comparable with the baseline method or with other methods that used the full operational area.
The authors in [
29] do not specify how the data were used. Literally, “In order to better verify the performance of the algorithm, we also conducted experiments on another widely used positioning dataset UJIIndoorLoc.” However, this algorithm requires a set of evaluation paths to asses the proposed algorithm, which is not provided in the original UJIIndoorLoc dataset. The full details about the data points used and how the evaluation paths were generated are lacking, i.e., the information provided does not enable reproducibility/replicability of the results.
In [
83], the authors use the UJIIndoorLoc as an additional experiment alongside their main work. However, the dataset was restricted to a small subset of the UJIIndoorLoc dataset. Literally, “The database from two random phone users (phone id: 13 and 14) in two different buildings (building id: 0 and 1) are used.” In this way, the data to be analyzed and trained on are much simpler and similar, resulting in optimistic performance compared to the baseline method and other solutions using the whole UJIIndoorLoc dataset.
In [
85], the authors used two datasets, including UJIIndoorLoc, to assess their proposed model. Despite providing details about the other dataset, they only mention that the UJIIndoorLoc dataset had 21,048 Wi-Fi fingerprints. It seems that the training and evaluation sets were merged into a common superset, which was later split by building ID in order to evaluate the model in three scenarios (buildings). Each of the three sets were split with a ratio of 70:30 to train and evaluate the proposed RDF ensembles.
In [
86], the authors randomly split the training set into training and validation sets with a ratio of 80:20. Then, the resulting solution based on CNN was tested over the 1111 evaluation samples, as in the original dataset for the models based on single RSS readings. However, for the method they proposed based on multiple consecutive RSS readings, they had to manipulate the original dataset, splitting the original training set into training, validation, and testing sets with 60%, 20% and 20% of data from the original training set, respectively, i.e., the proposed method was not assessed over an independent test set.
Finally, the original division for training and evaluation provided in UJIIndoorLoc was followed in [
81,
84]. In [
21], the authors do not detail how they trained their model with the UJIIndoorLoc dataset, as they only mention that the dataset contains 21,049 fingerprint samples. Although there is no clear indication about which data were used for training and evaluation, the context provided in the paper suggests that the authors used the evaluation data properly.
To sum up, the UJIIndoorLoc dataset includes a set for training and a set to test the accuracy of an IPS based on Wi-Fi fingerprinting. However, several authors mixed the two sets to apply cross-validation in order to create their own training, validation, and/or test sets, which led to data leakage. In these cases, overly optimistic results were obtained in validation and testing, as the subsets were not independent. In addition, we have observed that full details are often not provided when reporting experiments, which does not enable full reproducibility or replicability of research.
5.6. Experimental Scenarios
Regarding the scenarios in which experiments take place, there is a great diversity of areas. The spaces range from universities to parking lots, stores, residential buildings, etc. As can be seen in
Figure 9, 31 articles used an area of less than 100
, 26 between 100
and 500
, 13 between 500
and 1000
, and 21 higher than 1000
. It is important to highlight that in scenarios smaller than 100
, the use of rooms drops to 41%. In the overall studies, this value is 66%. Although it is true that there are experiments in very small spaces, in general this value indicates that precision is usually prioritized over realistic environments. It should be noted that there are articles with more than one experiment and/or simulation, and every area in these papers is counted here.
Another important aspect of Wi-Fi fingerprinting radio maps is whether they are used in spaces without rooms or with rooms. This simple fact can greatly change the results of a study. Specifically, 103 of the radio maps used have rooms in their experimentation space, 53 were in spaces without any rooms (spaces without walls), and there are 5 papers that do not indicate any such parameter. Finally, it should be noted, again, that most of the works are performed with the focus on obtaining the best results, and not on performing experiments in a realistic environment. For example, changes in RSSI signals are not significant in experiments of short duration and in very delimited spaces.
6. Conclusions
In this paper, we have shown an analysis of the use of machine learning for indoor positioning in Wi-Fi based systems. The starting point has been a systematic review, following the PRISMA guidelines, of the current status of the application of deep learning algorithms applied to indoor positioning using Wi-Fi. Information from 119 articles published between 2016 and 2021 has been extracted and analyzed. In total, 161 simulations or experiments were analyzed.
In this study, we observed a tendency to use Neural Networks in solutions based on the use of Wi-Fi networks. However, we did not find any optimal or standard configuration. In addition to Neural Networks, SVM is widely used as well.
We noted the predominant use of RSSI Wi-Fi signals, although the studies that focus on the CSI are very promising, and are the ones that have obtained the best accuracy; furthermore, in the last year there has been an increase in the number of articles focusing on the use of this information. The only drawback is the difficulty of accessing this information on a Wi-Fi signal.
In analyzing the quality of the results, the Mean Error is the most widely used metric, followed by Accuracy (in percentage). In all cases, the articles analyzed in this review provided results followed the ISO/IEC 18305 guidelines.
Regarding their experiments, we found that most of the papers used empirical results. These papers usually show better results, however, this is generally due to better prepared environments. One important element that we found is that most of the papers prioritize improved results instead of working in a real environment. Thus, although test field sizes range from to , many of these experiments are performed in small work spaces with many reference points and/or APs, or in open spaces without walls, which leads to unrealistic results in everyday environments. Likewise, we found studies in which training and validation data are misused by using repeated values for both sets.
On the other hand, forty papers used public datasets, among which the most popular was UJIIndoorLoc. Using public datasets allows for comparisons to be made between algorithms, as they are tested in the same environment. However, a deep analysis on how UJIIndoorLoc has been used revealed that many authors created their own test and validation data from the training dataset, which leads to overfitting and therefore, to better results than would be obtained with the baseline dataset.
The tables included in this review should be useful for those who want to focus their work based on the size of their work area, choice of machine learning algorithms, and desired accuracy, as well as their choice of the currently most commonly used metrics.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








