
Non-Intrusive Pipeline Flow Detection Based on Distributed Fiber Turbulent Vibration Sensing


Abstract
:1. Introduction
2. Theoretical Analysis
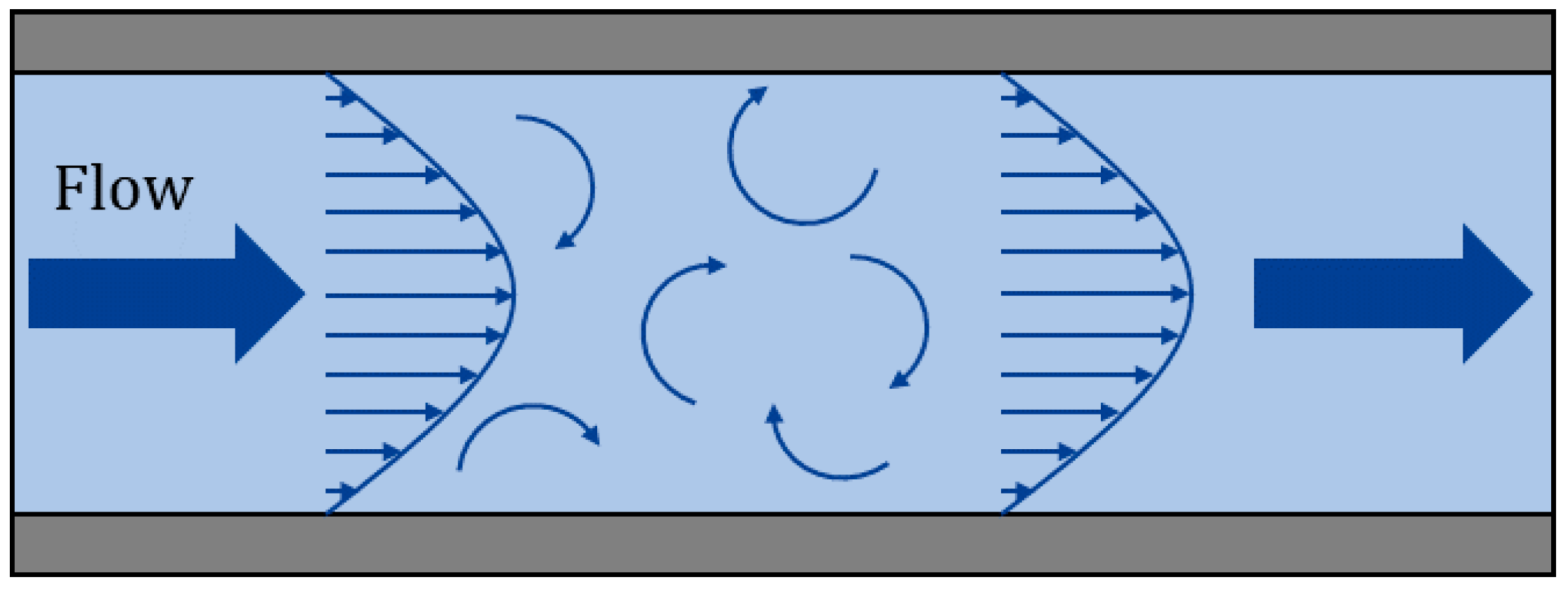
2.1. Principle of Flow Measurement Based on Turbulent Vibration
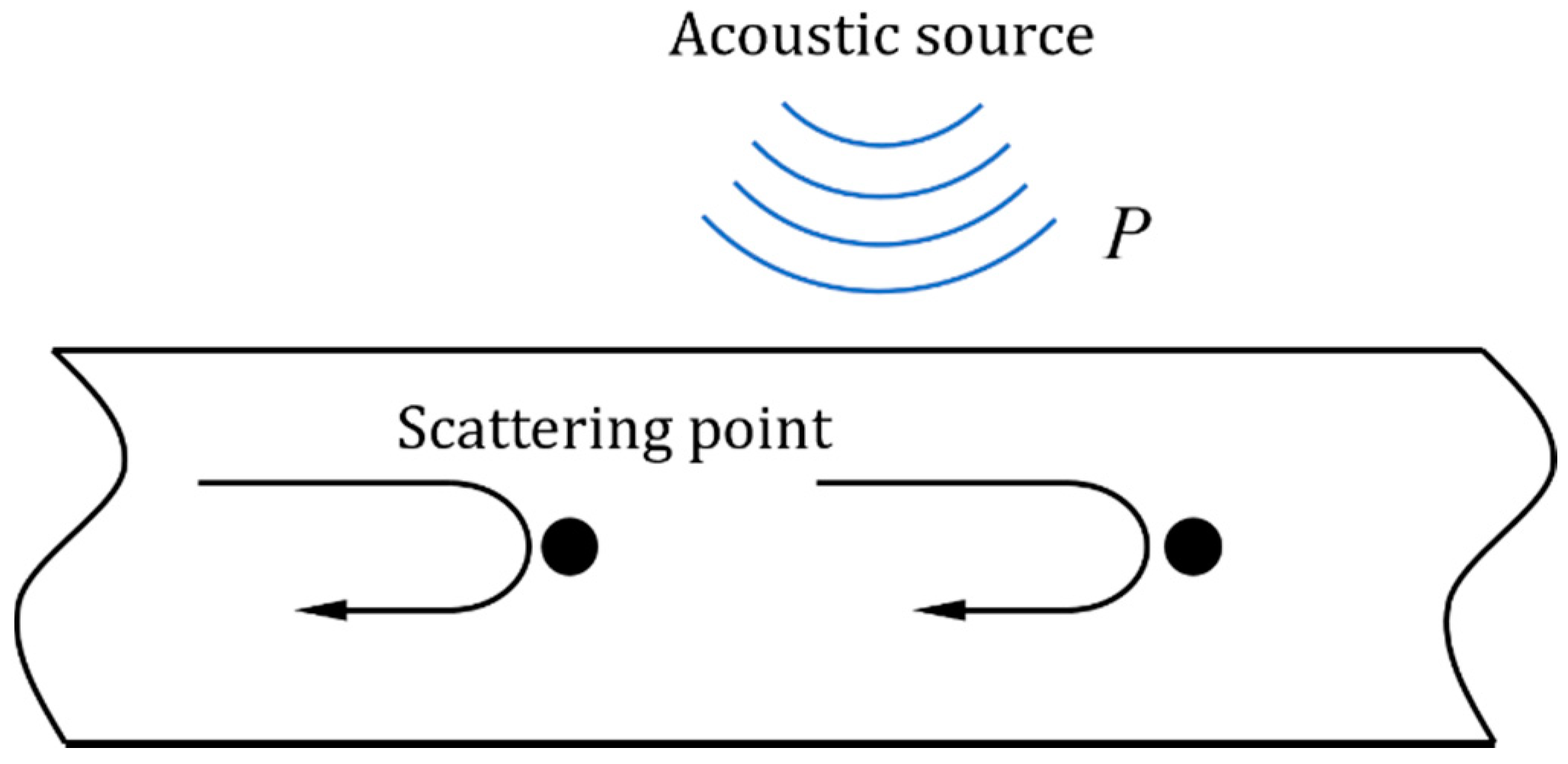
2.2. Mechanism of Optical Fiber Pressure-Phase Modulation
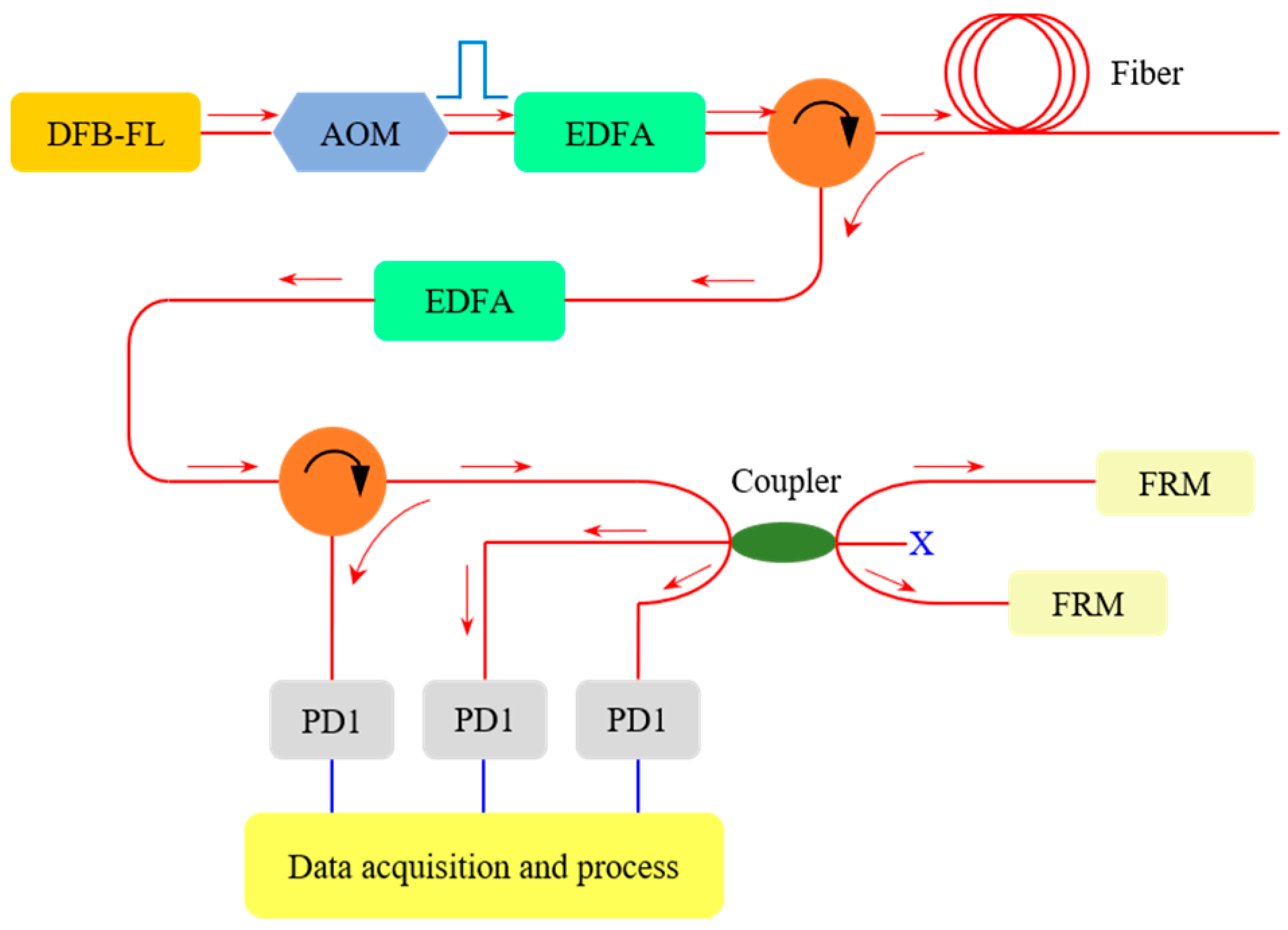
2.3. Spatial Differential Interference Detection
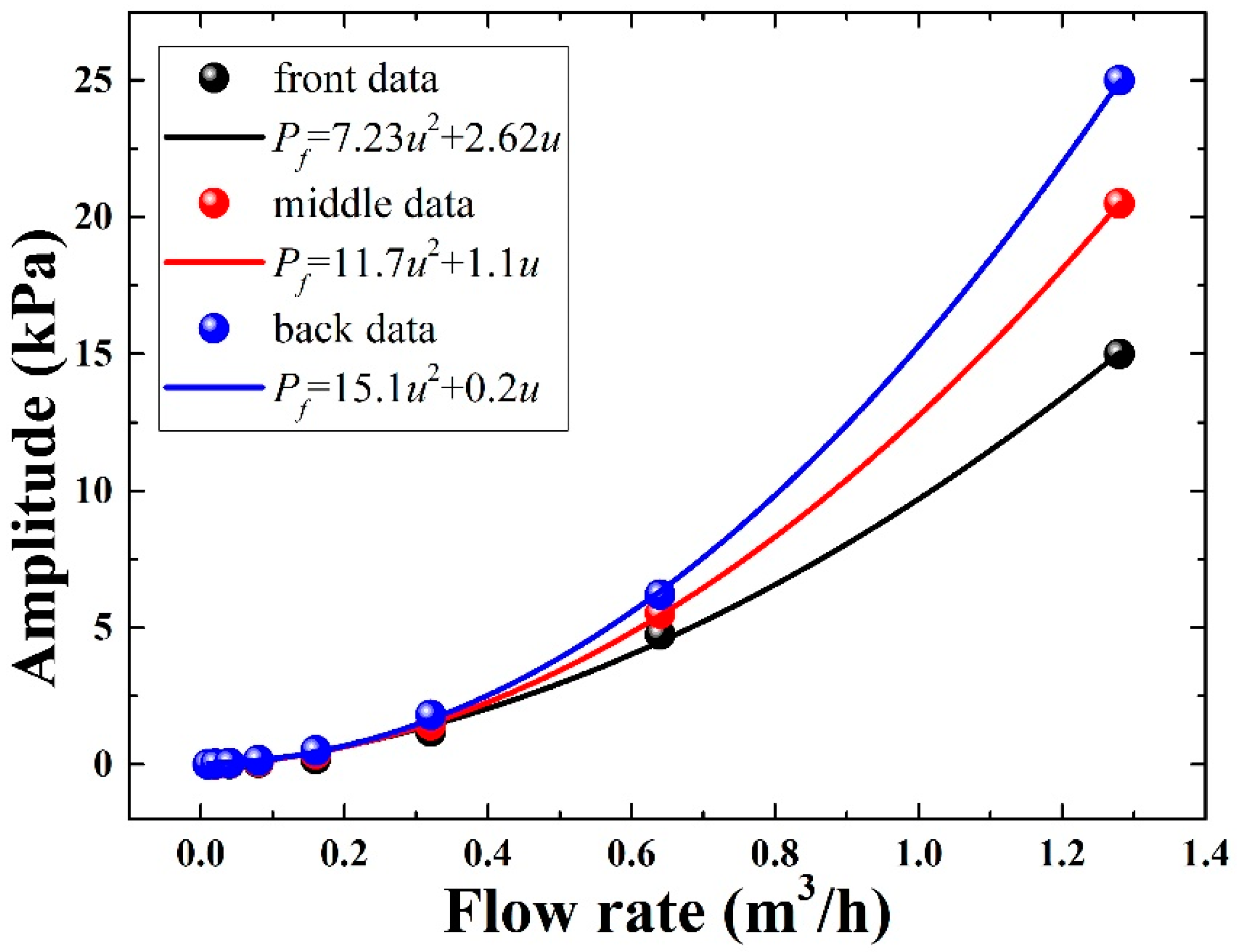
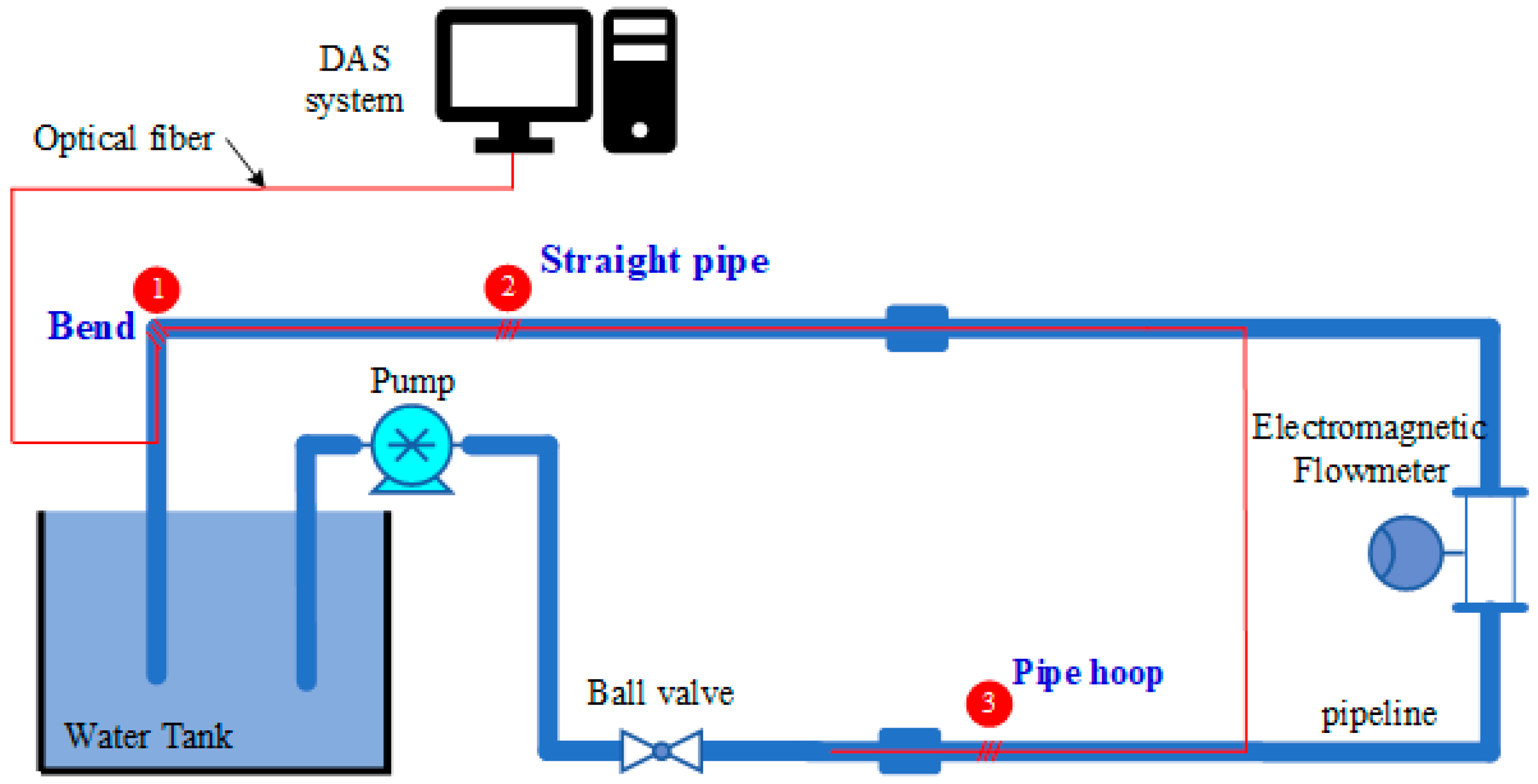
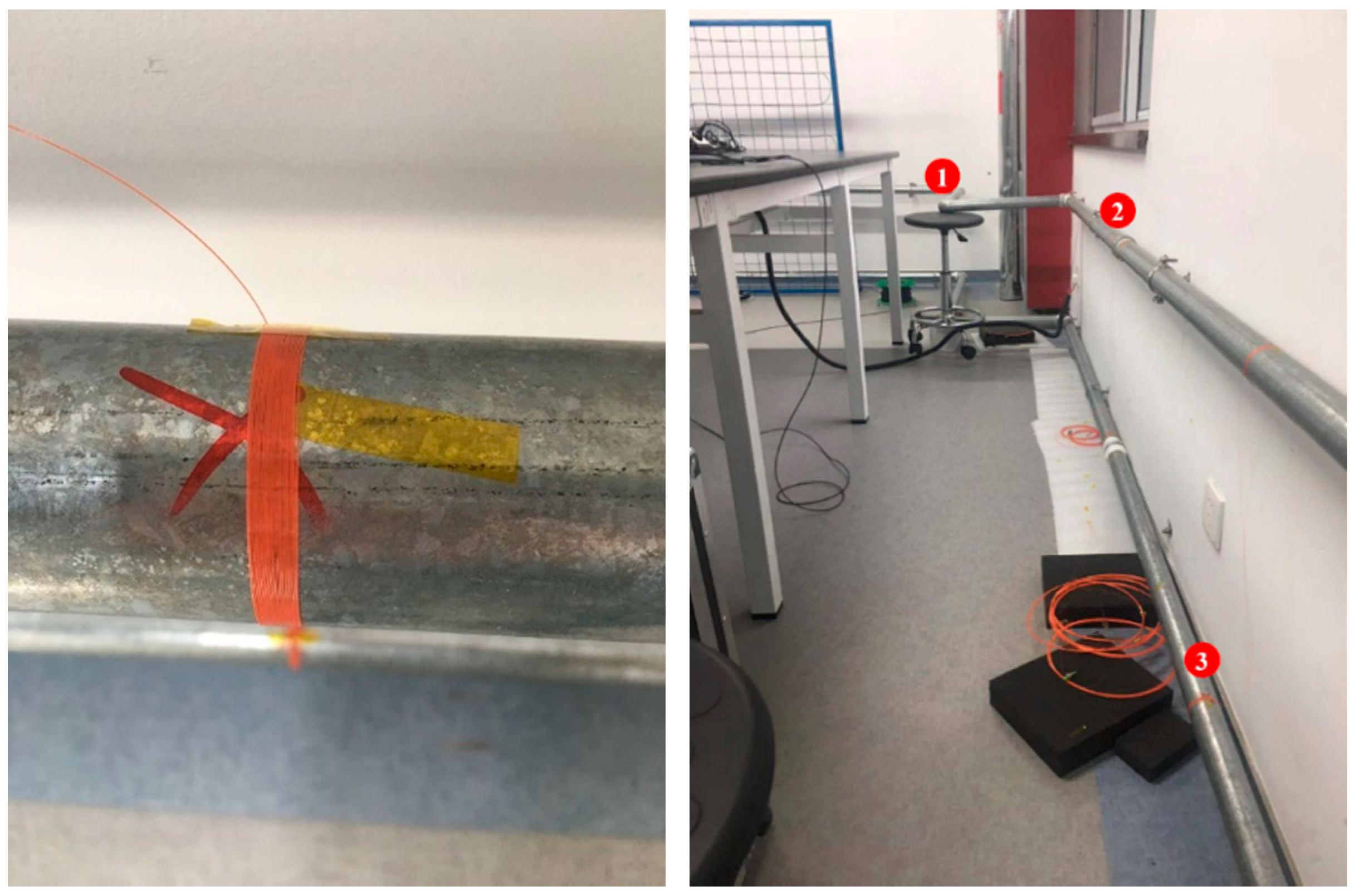
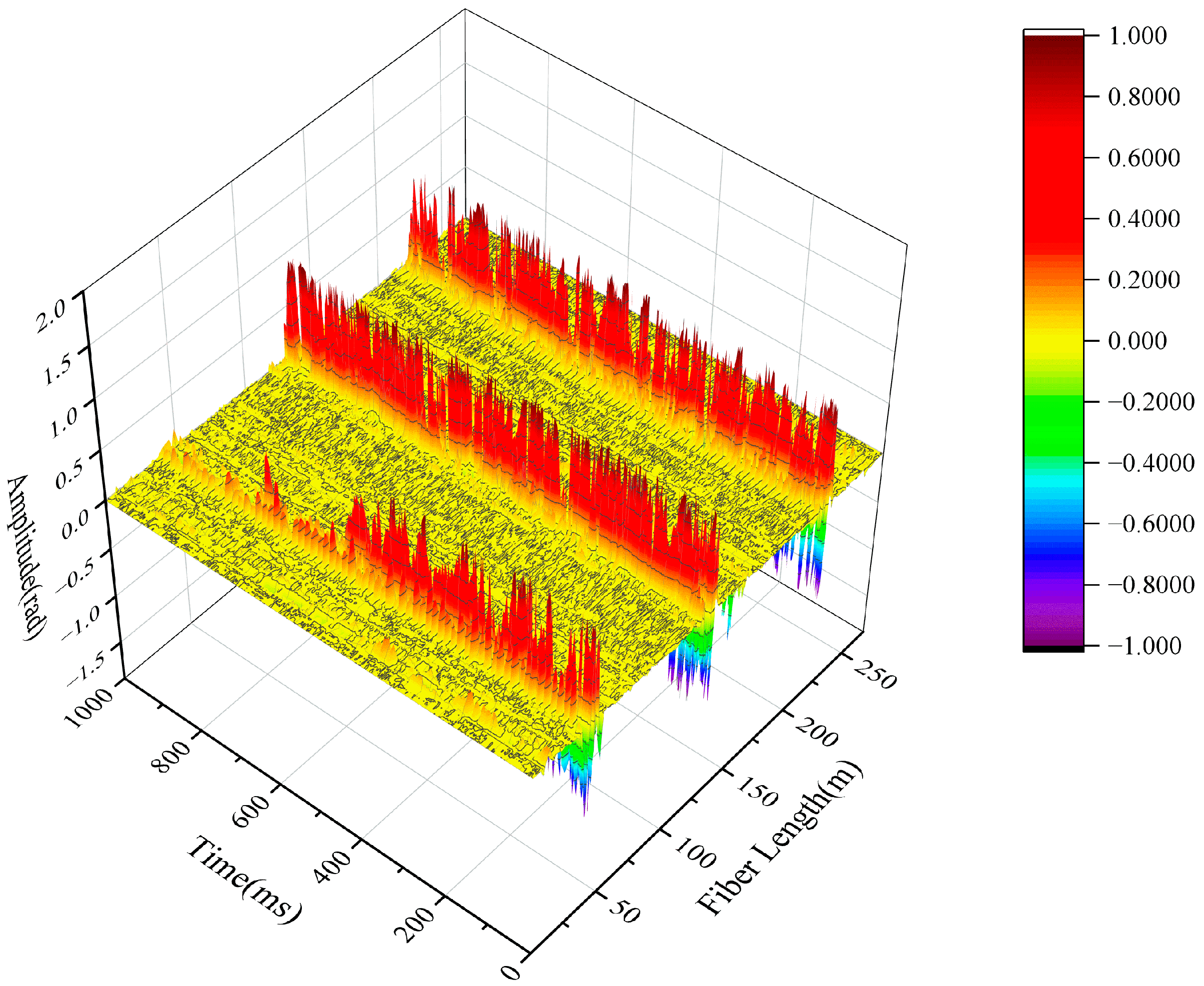
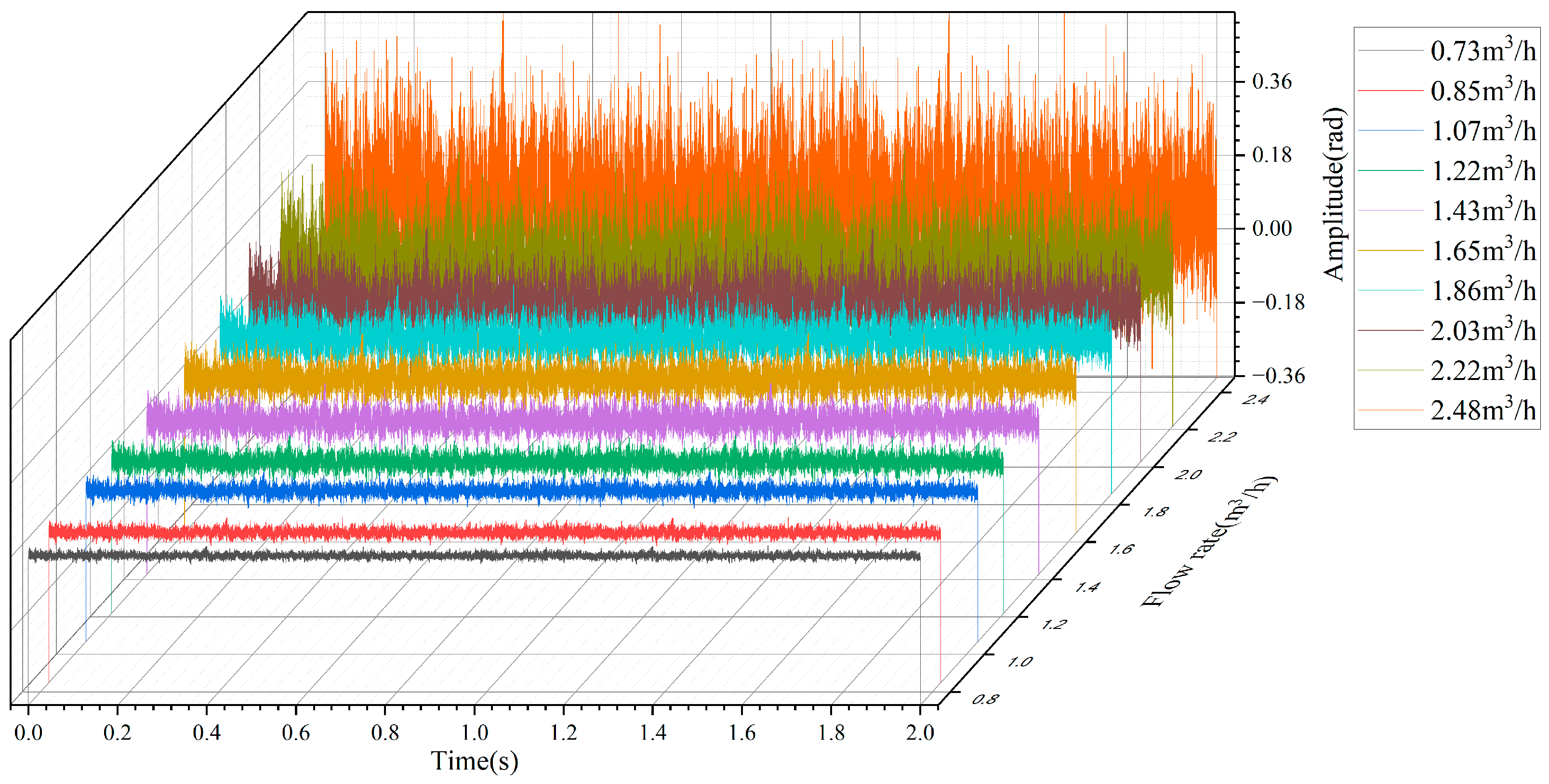
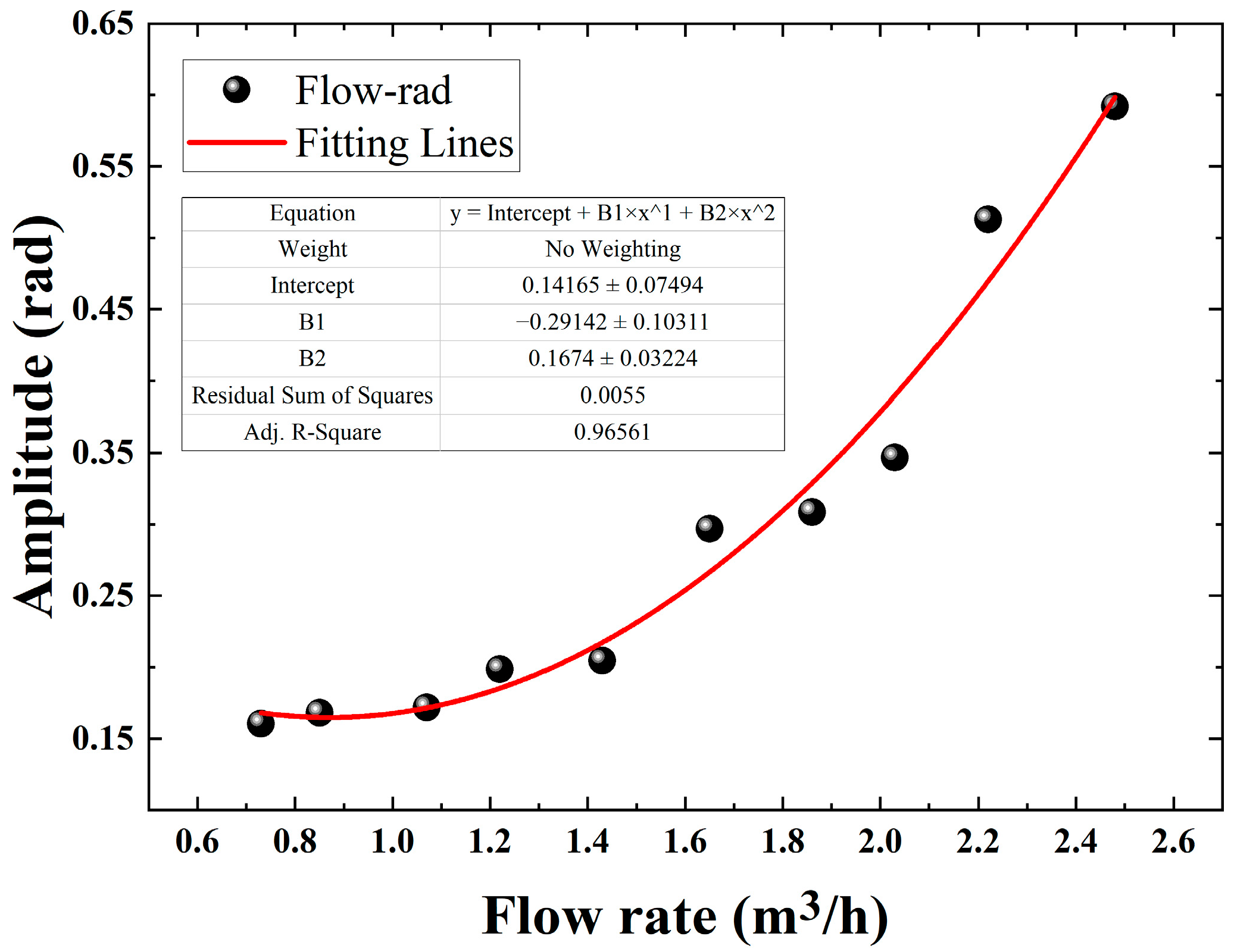
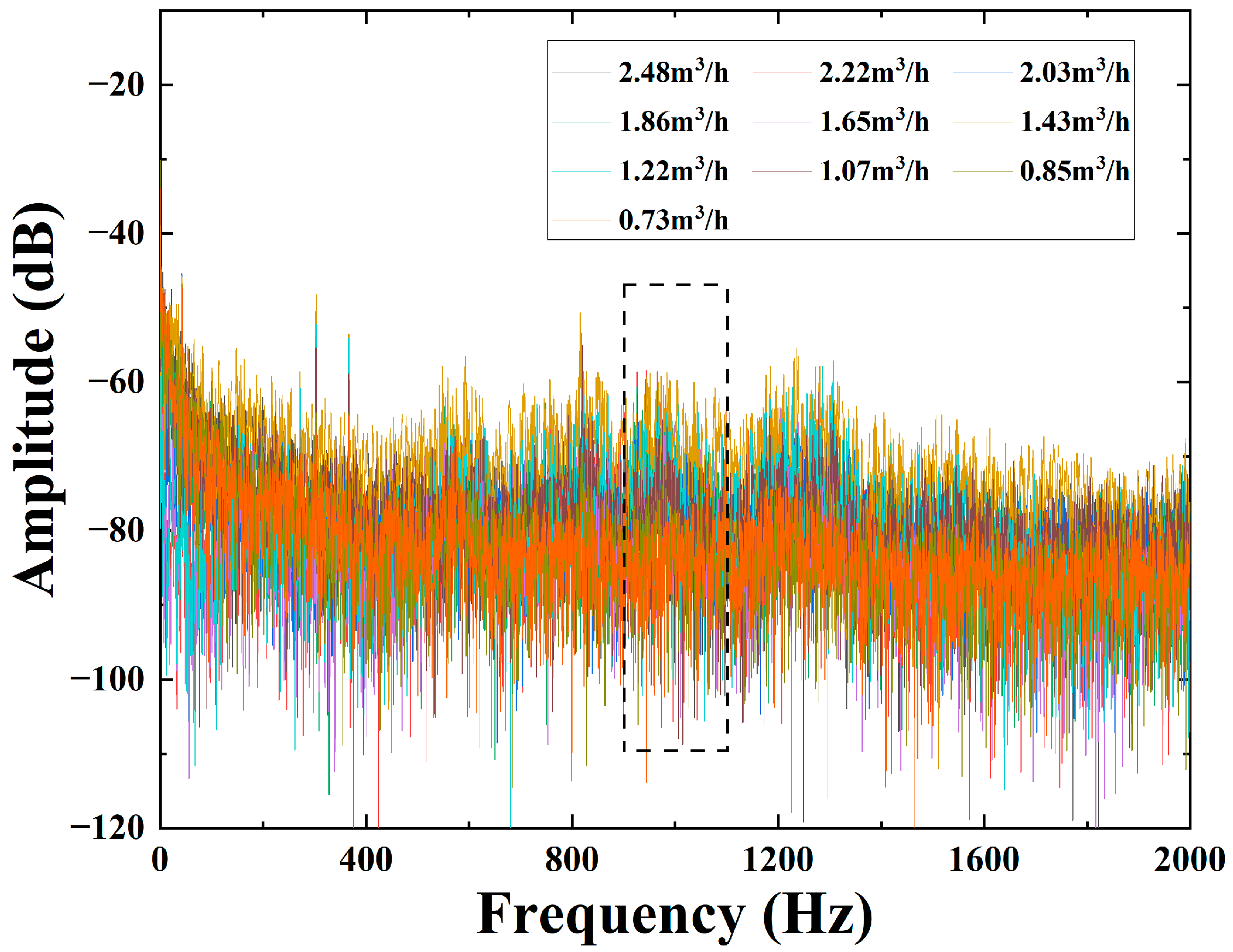
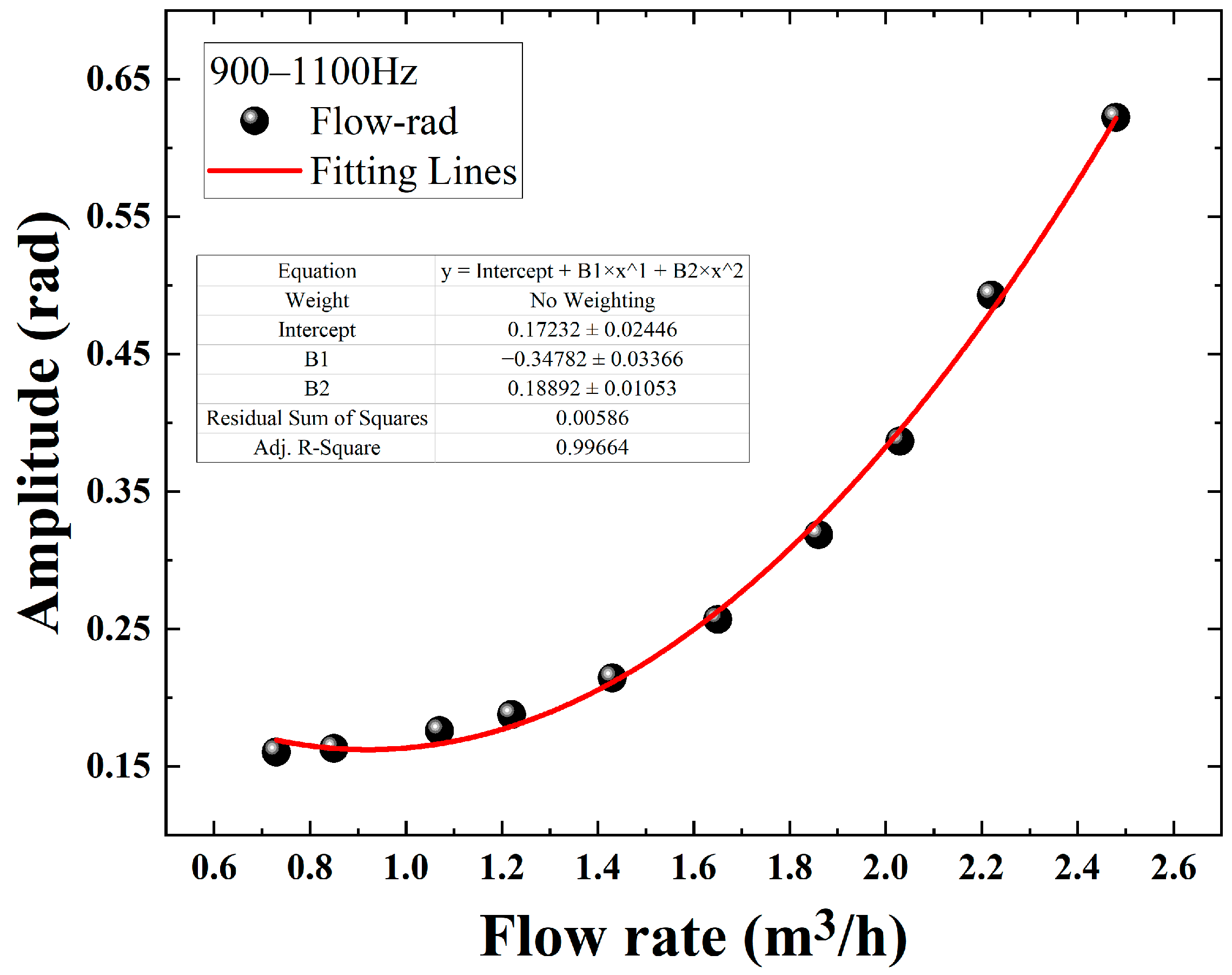
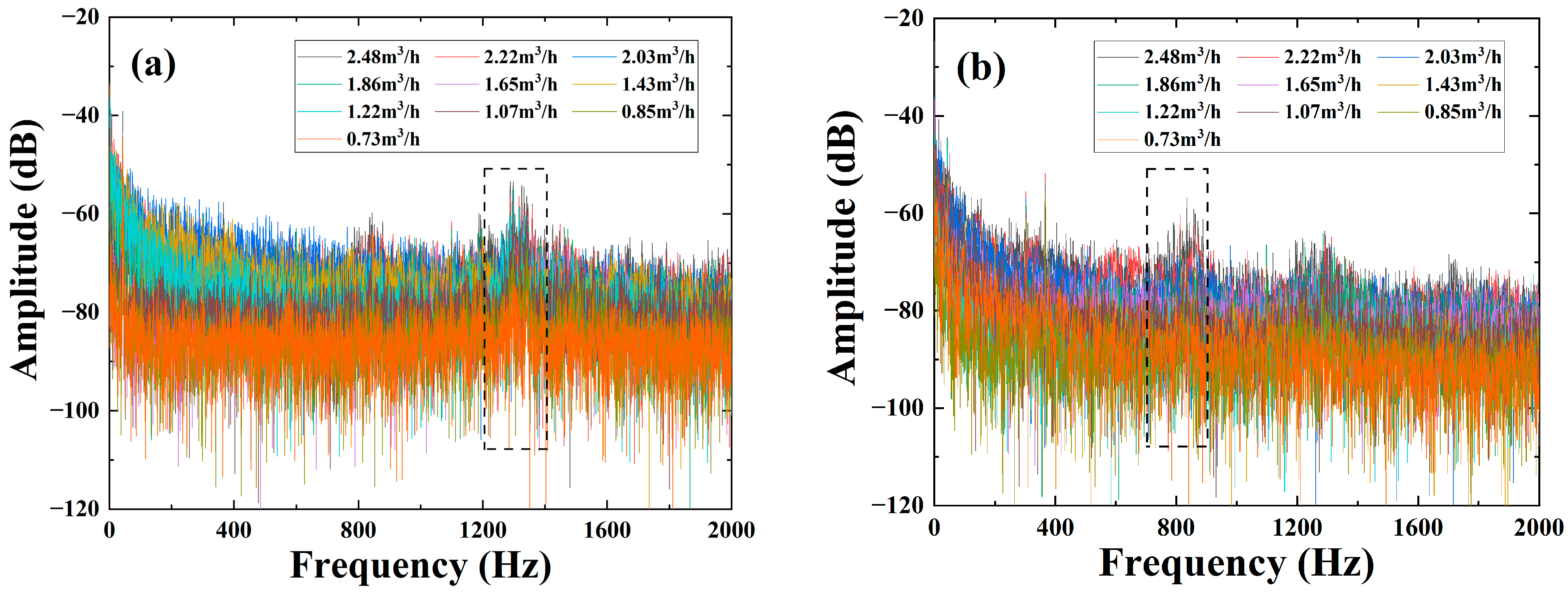
3. Experimental Result and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fang, J.X.; Taylor, H.F.; Choi, H.S. Fiber-opitc Fabry-Perot flow sensor. Microw. Opt. Technol. Lett. 1998, 18, 209–211. [Google Scholar] [CrossRef]
- Kaura, J.; Sierra, J. High-temperature fibers provide continuous DTS data in a harsh SAGD environment: Drilling/Completions. World Oil 2008, 229, 47–53. [Google Scholar]
- Xu, G.; Liang, C.; Chen, X.P.; Liu, D.Y.; Xu, P.; Shen, L.; Zhao, C.S. Investigation on dynamic calibration for an optical-fiber solids concentration probe in gas-solid two-phase flows. Sensors 2013, 13, 9201–9222. [Google Scholar] [CrossRef]
- Cashdollar, L.J.; Chen, K.P. Fiber Bragg grating flow sensors powered by in-fiber light. IEEE Sens. J. 2005, 5, 1327–1331. [Google Scholar] [CrossRef]
- Schena, E.; Saccomandi, P.; Silvestri, S. A high sensitivity fiber optic macro-bend based gas flow rate transducer for low flow rates: Theory, working principle, and static calibration. Rev. Sci. Instrum. 2013, 84, 024301. [Google Scholar] [CrossRef]
- Zhao, Y.; Gu, Y.F.; Lv, R.Q.; Yang, Y. A small probe-type flowmeter based on the differential fiber Bragg grating measurement method. IEEE Trans. Instrum. Meas. 2017, 66, 502–507. [Google Scholar] [CrossRef]
- Lv, R.Q.; Zheng, H.K.; Zhao, Y.; Gu, Y.F. An optical fiber sensor for simultaneous measurement of flow rate and temperature in the pipeline. Opt. Fiber Technol. 2018, 45, 313–318. [Google Scholar] [CrossRef]
- Thompson, A.S.; Maynes, D.; Blotter, J.D. Internal turbulent flow induced pipe vibrations with and without baffle plates. Fluids Eng. Div. Summer Meet. 2010, 54518, 649–659. [Google Scholar]
- Campagna, M.M.; Dinardo, G.; Fabbiano, L.; Vacca, G. Fluid flow measurements by means of vibration monitoring. Meas. Sci. Technol. 2015, 26, 115306. [Google Scholar] [CrossRef]
- Lannes, D.P.; Gama, A.L.; Bento, T.F.B. Measurement of flow rate using straight pipes and pipe bends with integrated piezoelectric sensors. Flow Meas. Instrum. 2018, 60, 208–216. [Google Scholar] [CrossRef]
- Stajanca, P.; Chruscicki, S.; Homann, T. Detection of leak-induced pipeline vibrations using fiber—Optic distributed acoustic sensing. Sensors 2018, 18, 2841. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shang, Y.; Liu, X.H.; Wang, C.; Zhao, W.A. Research on optical fiber flow test method with non-intrusion. Photonic Sens. 2014, 4, 132–136. [Google Scholar] [CrossRef] [Green Version]
- Ni, J.S.; Shang, Y.; Wang, C.; Zhao, W.A.; Li, C.; Cao, B.; Huang, S.; Wang, C.; Peng, G.D. Non-intrusive flow measurement based on a distributed feedback fiber laser. Chin. Opt. Lett. 2020, 18, 021204. [Google Scholar] [CrossRef]
- Wang, Z.N.; Zhang, B.; Xiong, J.; Fu, Y.; Lin, S.T.; Jiang, J.L.; Chen, Y.X.; Wu, Y.; Meng, Q.Y.; Rao, Y.J. Distributed acoustic sensing based on pulse-coding phase-sensitive OTDR. IEEE Internet Things J. 2018, 6, 6117–6124. [Google Scholar] [CrossRef]
- Lin, S.T.; Wang, Z.N.; Xiong, J.; Fu, Y.; Jiang, J.L.; Wu, Y.; Chen, Y.X.; Lu, C.Y.; Rao, Y.J. Rayleigh fading suppression in one-dimensional optical scatters. IEEE Access 2019, 7, 17125–17132. [Google Scholar] [CrossRef]
- Li, Z.Q.; Zhang, J.W.; Wang, M.N.; Zhong, Y.Z.; Fei, P. Fiber distributed acoustic sensing using convolutional long short-term memory network: A field test on high-speed railway intrusion detection. Opt. Express 2020, 28, 2925–2938. [Google Scholar] [CrossRef]
- Vahabi, N.; Willman, E.; Baghsiahi, H. Fluid flow velocity measurement in active wells using fiber optic distributed acoustic sensors. IEEE Sens. J. 2020, 20, 11499–11507. [Google Scholar] [CrossRef]
- Lior, I.; Sladen, A.; Rivet, D.; Ampuero, J.P.; Hello, Y.; Becerril, C.; Martins, H.; Lamare, P.; Jestin, C.; Tsagkli, S.; et al. On the Detection Capabilities of Underwater Distributed Acoustic Sensing. J. Geophys. Res. Solid Earth 2021, 126, e2020JB020925. [Google Scholar] [CrossRef]
- Evans, R.P.; Blotter, J.D.; Stephens, A.G. Flow rate measurements using flow-induced pipe vibration. J. Fluids Eng. -Trans. ASME 2004, 126, 280–285. [Google Scholar] [CrossRef]
- Barnoski, M.K.; Jensen, S.M. Fiber Waveguides: A Novel Technique for Investigating Attenuation Characteristics. Appl. Opt. 1976, 15, 2112–2115. [Google Scholar] [CrossRef]
- Wu, X.Q.; Tao, R.; Zhang, Q.F.; Zhang, G.; Li, L.; Peng, J.; Yu, B.L. Eliminating additional laser intensity modulation with an analog divider for fiber-optic interferometers. Opt. Commun. 2012, 285, 738–741. [Google Scholar] [CrossRef]
- Liu, Y.L.; Zhang, W.T.; Xu, T.W.; He, J.; Zhang, F.X.; Li, F. Fiber laser sensing system and its applications. Photonic Sens. 2011, 1, 43–53. [Google Scholar] [CrossRef] [Green Version]
- Todd, M.D.; Seaver, M.; Bucholtz, F. Improved, operationally-passive interferometric demodulation method using 3 × 3 coupler. Electron. Lett. 2002, 38, 784–786. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Value | Description |
|---|---|---|
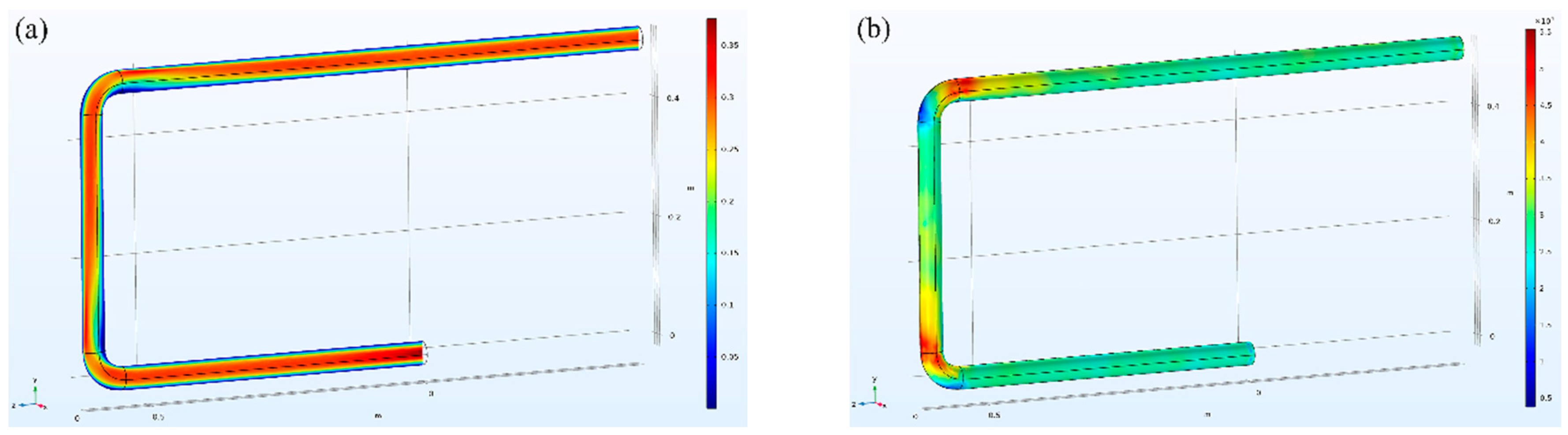
| D | 40 [mm] | Pipe diameter |
| Lin | 600 [mm] | Entrance length |
| Lc | 500 [mm] | Connection length |
| Lout | 1000 [mm] | Exit length |
| Rc | 50 [mm] | Coil radius |
| Rhof | 965.35 [kg/m3] | Density |
| Muf | 3.145 × 10−4 [Pa·s] | Dynamic viscosity |
| Uavg | 5 [m/s] | Average speed |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shang, Y.; Wang, C.; Zhang, Y.; Zhao, W.; Ni, J.; Peng, G. Non-Intrusive Pipeline Flow Detection Based on Distributed Fiber Turbulent Vibration Sensing. Sensors 2022, 22, 4044. https://doi.org/10.3390/s22114044
Shang Y, Wang C, Zhang Y, Zhao W, Ni J, Peng G. Non-Intrusive Pipeline Flow Detection Based on Distributed Fiber Turbulent Vibration Sensing. Sensors. 2022; 22(11):4044. https://doi.org/10.3390/s22114044
Chicago/Turabian StyleShang, Ying, Chen Wang, Yongkang Zhang, Wenan Zhao, Jiasheng Ni, and Gangding Peng. 2022. "Non-Intrusive Pipeline Flow Detection Based on Distributed Fiber Turbulent Vibration Sensing" Sensors 22, no. 11: 4044. https://doi.org/10.3390/s22114044