
Bearing Fault Diagnosis Using Multidomain Fusion-Based Vibration Imaging and Multitask Learning




Abstract
:1. Introduction
- (1)
- To address variable operating conditions, a composite color image is created by fusing information from multi-domains, such as the raw time-domain signal, the spectrum of time-domain signal, and the envelope spectrum of the time-frequency analysis. This 2-D composite image, named multi-domain fusion-based vibration imaging (MDFVI), is highly effective to generate a unique pattern even with variable speeds and loads.
- (2)
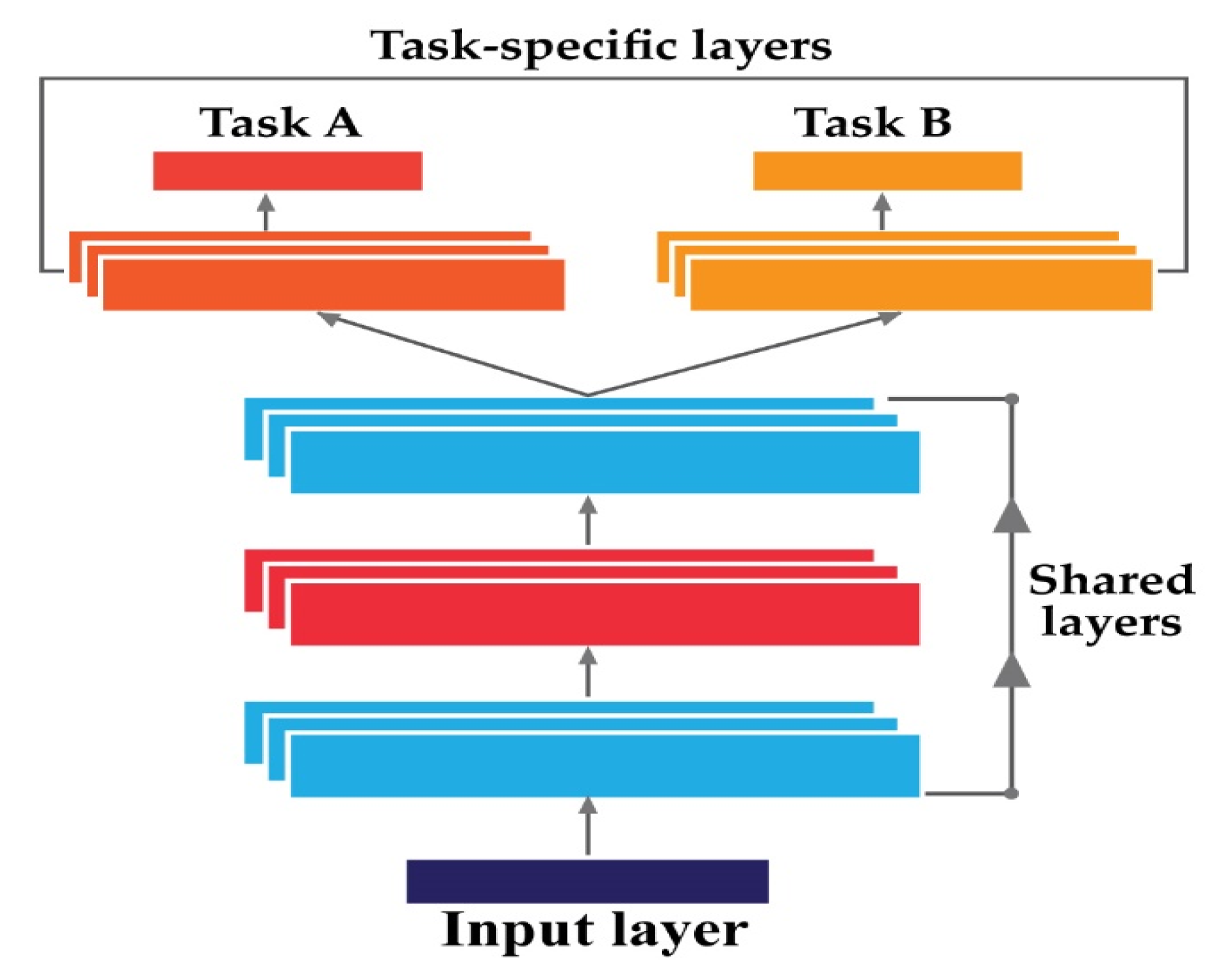
- The developed MDFVI images are further applied as inputs to the CNN-aided MTL network for automatic feature extraction and classification. The proposed network is capable of extracting features in parallel from the time-domain, the frequency-domain, and the time-frequency domain. Additionally, it is capable of predicting variable operating conditions simultaneously: (a) rotating speed and (b) fault types. As a result, multitasking capabilities for bearing fault diagnosis architecture are enabled.
- (3)
- The proposed method is tested on two benchmark datasets from the bearing experiment. The experimental results suggested that the proposed method outperformed state-of-the-arts in both datasets.
2. Technical Background
2.1. Fast-Fourier Transform (FFT)
2.2. Envelope Analysis
2.3. Convolution Neural Network (CNN)
2.3.1. Forward Propagation
2.3.2. Backward Propagation
2.4. Multi-Task Learning with CNN
3. Proposed Methodology
3.1. Multi-Domain Fusion Based Vibration Imaging (MDFVI)
3.2. Multi-Task Learning-Based Diagnostic Framework
3.3. Performance Evaluation Metrics
4. Experimental Setup and Performance Analysis
4.1. Case Study 1: Self-Designed Test Rig
4.1.1. Experimental Setup and Dataset Description
4.1.2. Results and Performance Comparison
- (1)
- (2)
- TFI + CNN: To construct the multi-fusion input, the input is converted into many time-frequency images (TFI), which are then transferred to the MTL-CNN architecture, which is based on the proposed CNN model taken from [37].
- (3)
- GI + CNN: The input is transformed to 2D greyscale pictures (GI), which are then fed into the MTL-CNN, which is based on the proposed CNN from [60].
- (4)
- VMD + MTL-CNN: To generate the multifusion input, each signal is decomposed into a sequence of intrinsic mode functions using variational mode decomposition and then channel wise joined [61]. Then, using the suggested MTL-CNN architecture, those series of intrinsic mode functions are fusioned channel wise for classification.
4.2. Case Study 2: Case Western Reserve University Dataset
4.2.1. Experimental Setup and Dataset Description
4.2.2. Verification and Performance Comparison
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mao, W.; Feng, W.; Liu, Y.; Zhang, D.; Liang, X. A new deep auto-encoder method with fusing discriminant information for bearing fault diagnosis. Mech. Syst. Signal Process. 2021, 150, 107233. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, B.; Gao, D. Bearing fault diagnosis base on multi-scale CNN and LSTM model. J. Intell. Manuf. 2021, 32, 971–987. [Google Scholar] [CrossRef]
- Yan, X.; Liu, Y.; Jia, M.; Zhu, Y. A multi-stage hybrid fault diagnosis approach for rolling element bearing under various working conditions. IEEE Access 2019, 7, 138426–138441. [Google Scholar] [CrossRef]
- Hasan, M.J.; Kim, J.; Kim, C.H.; Kim, J.-M. Health State Classification of a Spherical Tank Using a Hybrid Bag of Features and K-Nearest Neighbor. Appl. Sci. 2020, 10, 2525. [Google Scholar] [CrossRef] [Green Version]
- Mao, W.; Chen, J.; Liang, X.; Zhang, X. A new online detection approach for rolling bearing incipient fault via self-adaptive deep feature matching. IEEE Trans. Instrum. Meas. 2019, 69, 443–456. [Google Scholar] [CrossRef]
- Rai, A.; Kim, J.-M. A novel health indicator based on the Lyapunov exponent, a probabilistic self-organizing map, and the Gini-Simpson index for calculating the RUL of bearings. Measurement 2020, 164, 108002. [Google Scholar] [CrossRef]
- Hasan, M.J.; Sohaib, M.; Kim, J.-M. A Multitask-Aided Transfer Learning-Based Diagnostic Framework for Bearings under Inconsistent Working Conditions. Sensors 2020, 20, 7205. [Google Scholar] [CrossRef]
- Qu, J.; Zhang, Z.; Gong, T. A novel intelligent method for mechanical fault diagnosis based on dual-tree complex wavelet packet transform and multiple classifier fusion. Neurocomputing 2016, 171, 837–853. [Google Scholar] [CrossRef]
- Chen, G.; Liu, F.; Huang, W. Sparse discriminant manifold projections for bearing fault diagnosis. J. Sound Vib. 2017, 399, 330–344. [Google Scholar] [CrossRef]
- Zheng, H.; Wang, R.; Yang, Y.; Li, Y.; Xu, M. Intelligent fault identification based on multisource domain generalization towards actual diagnosis scenario. IEEE Trans. Ind. Electron. 2019, 67, 1293–1304. [Google Scholar] [CrossRef]
- Oh, H.; Jung, J.H.; Jeon, B.C.; Youn, B.D. Scalable and unsupervised feature engineering using vibration-imaging and deep learning for rotor system diagnosis. IEEE Trans. Ind. Electron. 2017, 65, 3539–3549. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, M.; Wan, S.; He, Y.; Wang, X. A bearing fault diagnosis method based on multiscale dispersion entropy and GG clustering. Measurement 2021, 185, 110023. [Google Scholar] [CrossRef]
- Ali, J.B.; Fnaiech, N.; Saidi, L.; Chebel-Morello, B.; Fnaiech, F. Application of empirical mode decomposition and artificial neural network for automatic bearing fault diagnosis based on vibration signals. Appl. Acoust. 2015, 89, 16–27. [Google Scholar]
- Shao, S.-Y.; Sun, W.-J.; Yan, R.-Q.; Wang, P.; Gao, R.X. A deep learning approach for fault diagnosis of induction motors in manufacturing. Chin. J. Mech. Eng. 2017, 30, 1347–1356. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Huang, J.; Ren, G.; Wang, D. A hydraulic fault diagnosis method based on sliding-window spectrum feature and deep belief network. J. Vibroeng. 2017, 19, 4272–4284. [Google Scholar]
- Yan, X.; Jia, M. A novel optimized SVM classification algorithm with multi-domain feature and its application to fault diagnosis of rolling bearing. Neurocomputing 2018, 313, 47–64. [Google Scholar] [CrossRef]
- Sohaib, M.; Kim, C.-H.; Kim, J.-M. A Hybrid Feature Model and Deep-Learning-Based Bearing Fault Diagnosis. Sensors 2017, 17, 2876. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Li, S.; Song, L.; Cui, L.; Wang, P. An enhanced intelligent diagnosis method based on multi-sensor image fusion via improved deep learning network. IEEE Trans. Instrum. Meas. 2019, 69, 2648–2657. [Google Scholar] [CrossRef]
- Huang, R.; Liao, Y.; Zhang, S.; Li, W. Deep decoupling convolutional neural network for intelligent compound fault diagnosis. IEEE Access 2018, 7, 1848–1858. [Google Scholar] [CrossRef]
- Zhang, W.; Peng, G.; Li, C.; Chen, Y.; Zhang, Z. A new deep learning model for fault diagnosis with good anti-noise and domain adaptation ability on raw vibration signals. Sensors 2017, 17, 425. [Google Scholar] [CrossRef]
- Kang, M.; Islam, M.R.; Kim, J.; Kim, J.M.; Pecht, M. A Hybrid Feature Selection Scheme for Reducing Diagnostic Performance Deterioration Caused by Outliers in Data-Driven Diagnostics. IEEE Trans. Ind. Electron. 2016, 63, 3299–3310. [Google Scholar] [CrossRef]
- Ince, T.; Kiranyaz, S.; Eren, L.; Askar, M.; Gabbouj, M. Real-Time Motor Fault Detection by 1-D Convolutional Neural Networks. IEEE Trans. Ind. Electron. 2016, 63, 7067–7075. [Google Scholar] [CrossRef]
- Zhang, T.; Liu, S.; Wei, Y.; Zhang, H. A novel feature adaptive extraction method based on deep learning for bearing fault diagnosis. Measurement 2021, 185, 110030. [Google Scholar] [CrossRef]
- Dobrescu, A.; Giuffrida, M.V.; Tsaftaris, S.A. Doing More With Less: A Multitask Deep Learning Approach in Plant Phenotyping. Front. Plant Sci. 2020, 11, 141. [Google Scholar] [CrossRef] [PubMed]
- Pan, S.J.; Yang, Q. A survey on transfer learning. IEEE Trans. Knowl. Data Eng. 2009, 22, 1345–1359. [Google Scholar] [CrossRef]
- Randall, R.B.; Antoni, J. Rolling element bearing diagnostics-A tutorial. Mech. Syst. Signal Process. 2011, 25, 485–520. [Google Scholar] [CrossRef]
- Pang, B.; Tang, G.; Tian, T.; Zhou, C. Rolling Bearing Fault Diagnosis Based on an Improved HTT Transform. Sensors 2018, 18, 1203. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sadoughi, M.; Hu, C. Physics-based convolutional neural network for fault diagnosis of rolling element bearings. IEEE Sens. J. 2019, 19, 4181–4192. [Google Scholar] [CrossRef]
- Howard, I. A Review of Rolling Element Bearing Vibration, Detection, Diagnosis and Prognosis; DSTO-AMRL Report; DSTO-RR-00113; DATO: Canberra, Australia, 1994. [Google Scholar]
- Lecun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Hasan, M.J.; Islam, M.M.M.; Kim, J.M. Acoustic spectral imaging and transfer learning for reliable bearing fault diagnosis under variable speed conditions. Meas. J. Int. Meas. Confed. 2019, 138, 620–631. [Google Scholar] [CrossRef]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A simple way to prevent neural networks from overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Ioffe, S.; Szegedy, C. Batch normalization: Accelerating deep network training by reducing internal covariate shift. arXiv 2015, arXiv:1502.03167. [Google Scholar]
- Dahl, G.E.; Sainath, T.N.; Hinton, G.E. Improving deep neural networks for LVCSR using rectified linear units and dropout. In Proceedings of the 2013 IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 8609–8613. [Google Scholar]
- Wang, H.; Xu, J.; Yan, R.; Gao, R.X. A New Intelligent Bearing Fault Diagnosis Method Using SDP Representation and SE-CNN. IEEE Trans. Instrum. Meas. 2019, 69, 2377–2389. [Google Scholar] [CrossRef]
- Zhao, M.; Kang, M.; Tang, B.; Pecht, M. Multiple Wavelet Coefficients Fusion in Deep Residual Networks for Fault Diagnosis. IEEE Trans. Ind. Electron. 2019, 66, 4696–4706. [Google Scholar] [CrossRef]
- Wang, J.; Mo, Z.; Zhang, H.; Miao, Q. A deep learning method for bearing fault diagnosis based on time-frequency image. IEEE Access 2019, 7, 42373–42383. [Google Scholar] [CrossRef]
- Jing, L.; Zhao, M.; Li, P.; Xu, X. A convolutional neural network based feature learning and fault diagnosis method for the condition monitoring of gearbox. Measurement 2017, 111, 1–10. [Google Scholar] [CrossRef]
- Ma, J.; Wu, F.; Zhu, J.; Xu, D.; Kong, D. A pre-trained convolutional neural network based method for thyroid nodule diagnosis. Ultrasonics 2017, 73, 221–230. [Google Scholar] [CrossRef] [PubMed]
- Brownlee, J. What is the Difference Between a Batch and an Epoch in a Neural Network? Mach. Learn. Mastery 2018. Available online: https://machinelearningmastery.com/difference-between-a-batch-and-an-epoch/ (accessed on 19 December 2021).
- Ruder, S. An overview of multi-task learning in deep neural networks. arXiv 2017, arXiv:1706.05098. [Google Scholar]
- Hasan, M.J.; Kim, J.-M. Bearing Fault Diagnosis under Variable Rotational Speeds Using Stockwell Transform-Based Vibration Imaging and Transfer Learning. Appl. Sci. 2018, 8, 2357. [Google Scholar] [CrossRef] [Green Version]
- Long, M.; Cao, Z.; Wang, J.; Philip, S.Y. Learning multiple tasks with multilinear relationship networks. In Proceedings of the Advances in Neural Information Processing Systems, Online, 4 December 2017; pp. 1594–1603. [Google Scholar]
- Hoang, D.-T.; Kang, H.-J. Rolling element bearing fault diagnosis using convolutional neural network and vibration image. Cogn. Syst. Res. 2019, 53, 42–50. [Google Scholar] [CrossRef]
- Hasan, M.J.; Kim, J.-M. Deep Convolutional Neural Network with 2D Spectral Energy Maps for Fault Diagnosis of Gearboxes under Variable Speed. In Proceedings of the Mediterranean Conference on Pattern Recognition and Artificial Intelligence, Online, 18 December 2019; pp. 106–117. [Google Scholar]
- Tao, H.; Wang, P.; Chen, Y.; Stojanovic, V.; Yang, H. An unsupervised fault diagnosis method for rolling bearing using STFT and generative neural networks. J. Frankl. Inst. 2020, 357, 7286–7307. [Google Scholar] [CrossRef]
- Yin, Q.; Shen, L.; Lu, M.; Wang, X.; Liu, Z. Selection of optimal window length using STFT for quantitative SNR analysis of LFM signal. J. Syst. Eng. Electron. 2013, 24, 26–35. [Google Scholar] [CrossRef]
- Cao, P.; Zhang, S.; Tang, J. Preprocessing-Free Gear Fault Diagnosis Using Small Datasets with Deep Convolutional Neural Network-Based Transfer Learning. IEEE Access 2018, 6, 26241–26253. [Google Scholar] [CrossRef]
- Luque, A.; Carrasco, A.; Martín, A.; de las Heras, A. The impact of class imbalance in classification performance metrics based on the binary confusion matrix. Pattern Recognit. 2019, 91, 216–231. [Google Scholar] [CrossRef]
- Goutte, C.; Gaussier, E. A probabilistic interpretation of precision, recall and F-score, with implication for evaluation. In Proceedings of the European Conference on Information Retrieval, Santiago de Compostela, Spain, 21–23 March 2005; Springer: Berlin/Heidelberg, Germany, 2005; pp. 345–359. [Google Scholar]
- van der Maaten, L.; Hinton, G. Visualizing data using t-SNE. J. Mach. Learn. Res. 2008, 9, 2579–2605. [Google Scholar]
- Browne, M.W. Cross-validation methods. J. Math. Psychol. 2000, 44, 108–132. [Google Scholar] [CrossRef] [Green Version]
- Case Western Reserve University. Case Western Bearing Data Center. 2017. Available online: https://engineering.case.edu/bearingdatacenter (accessed on 13 November 2021).
- Sohaib, M.; Kim, J.-M. Fault diagnosis of rotary machine bearings under inconsistent working conditions. IEEE Trans. Instrum. Meas. 2019, 69, 3334–3347. [Google Scholar] [CrossRef]
- Hasan, M.J.; Sohaib, M.; Kim, J.-M. An Explainable AI-Based Fault Diagnosis Model for Bearings. Sensors 2021, 21, 4070. [Google Scholar] [CrossRef]
- Piezotronic, P. Sensor Details. Available online: http://www.pcb.com/contentstore/mktgContent/IMI_Downloads/IM%0AI-RouteBased_LowRes.pdf (accessed on 13 November 2021).
- Amar, M.; Gondal, I.; Wilson, C. Vibration spectrum imaging: A novel bearing fault classification approach. IEEE Trans. Ind. Electron. 2015, 62, 494–502. [Google Scholar] [CrossRef]
- Hoang, D.T.; Kang, H.J. A Motor Current Signal-Based Bearing Fault Diagnosis Using Deep Learning and Information Fusion. IEEE Trans. Instrum. Meas. 2019, 69, 3325–3333. [Google Scholar] [CrossRef]
- Guo, S.; Zhang, B.; Yang, T.; Lyu, D.; Gao, W. Multitask Convolutional Neural Network with Information Fusion for Bearing Fault Diagnosis and Localization. IEEE Trans. Ind. Electron. 2019, 67, 8005–8015. [Google Scholar] [CrossRef]
- Pucciarelli, G. Wavelet analysis in volcanology: The case of phlegrean fields. J. Environ. Sci. Eng. A 2017, 6, 300–307. [Google Scholar]
- Cui, H.; Guan, Y.; Chen, H. Rolling element fault diagnosis based on VMD and sensitivity MCKD. IEEE Access 2021, 9, 120297–120308. [Google Scholar] [CrossRef]
- Xiao, F. Multi-sensor data fusion based on the belief divergence measure of evidences and the belief entropy. Inf. Fusion 2019, 46, 23–32. [Google Scholar] [CrossRef]
- Shao, H.; Lin, J.; Zhang, L.; Galar, D.; Kumar, U. A novel approach of multisensory fusion to collaborative fault diagnosis in maintenance. Inf. Fusion 2021, 74, 65–76. [Google Scholar] [CrossRef]
- Zhang, Z.-H.; Min, F.; Chen, G.-S.; Shen, S.-P.; Wen, Z.-C.; Zhou, X.-B. Tri-Partition State Alphabet-Based Sequential Pattern for Multivariate Time Series. Cognit. Comput. 2021, 11, 11294. [Google Scholar] [CrossRef]
- Ran, X.; Zhou, X.; Lei, M.; Tepsan, W.; Deng, W. A novel k-means clustering algorithm with a noise algorithm for capturing urban hotspots. Appl. Sci. 2021, 11, 11202. [Google Scholar] [CrossRef]
- Case Western Reserve University. Bearing Data Center Website. Available online: http://csegroups.case.edu/bearingdatacenter/pages/download-data-file (accessed on 13 November 2021).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Health Type | Shaft Speed (rpm) | Crack Size | |
|---|---|---|---|
| Length (mm) | |||
| Dataset 1 | NT | 300 | - |
| IRT | 6 | ||
| ORT | 6 | ||
| RT | 6 | ||
| Dataset 2 | NT | 400 | - |
| IRT | 6 | ||
| ORT | 6 | ||
| RT | 6 | ||
| Dataset 3 | NT | 500 | - |
| IRT | 6 | ||
| ORT | 6 | ||
| RT | 6 |
| Dataset | Train (60%) | Test (40%) | Total Samples | Sample/Health Type | |
|---|---|---|---|---|---|
| Training (80%) | Validation (20%) | ||||
| 1 | 384 | 96 | 320 | 800 | 200 |
| 2 | 384 | 96 | 320 | 800 | 200 |
| 3 | 384 | 96 | 320 | 800 | 200 |
| Total | 1152 | 288 | 960 | ||
| Tasks | Conditions | F1 (%) | aF1 (%) |
|---|---|---|---|
| Task 1: Speed detection | 300 RPM | 100 | 99.99 |
| 400 RPM | 99.99 | ||
| 500 RPM | 100 | ||
| Task 2: Health type detection | NT | 100 | 100 |
| IRT | 100 | ||
| ORT | 100 | ||
| RT | 100 |
| Methods | Tasks | aF1 (%) | Improvement (Proposed − Current) |
|---|---|---|---|
| WC + MTL | Task 1 | 91.21 | 99.99 − 91.21 = 8.78 |
| Task 2 | 93.45 | 100 − 93.45 = 6.55 | |
| TFI + CNN | Task 1 | 93.41 | 99.99 − 93.41 = 6.58 |
| Task 2 | 93.95 | 100 − 93.95 = 6.05 | |
| GI + CNN | Task 1 | 87.48 | 99.99 − 87.48 = 12.51 |
| Task 2 | 86.92 | 100 − 86.92 = 13.08 | |
| VMD + MTL-CNN | Task 1 | 81.38 | 100 − 81.38 = 18.62 |
| Task 2 | 80.52 | 100 − 80.52 = 19.48 | |
| Proposed | Task 1 | 99.99 | - |
| Task 2 | 100 | - |
| Health Type | RPM | Load | Crack Size | |
|---|---|---|---|---|
| Length (Inches) | ||||
| Dataset 1 | NT | 1797 | 0 | - |
| IRT | 0 | 0.007 | ||
| ORT | 0 | 0.007 | ||
| BT | 0 | 0.007 | ||
| Dataset 2 | NT | 1772 | 1 | - |
| IRT | 1 | 0.007 | ||
| ORT | 1 | 0.007 | ||
| BT | 1 | 0.007 | ||
| Dataset 3 | NT | 1750 | 2 | - |
| IRT | 2 | 0.007 | ||
| ORT | 2 | 0.007 | ||
| BT | 2 | 0.007 |
| Dataset | Training (60%) | Testing (40%) | Total Samples | Sample/Health Type | |
|---|---|---|---|---|---|
| Training (80%) | Validation (20%) | ||||
| 1 | 480 | 120 | 400 | 1000 | 250 |
| 2 | 480 | 120 | 400 | 1000 | 250 |
| 3 | 480 | 120 | 400 | 1000 | 250 |
| Total | 1440 | 360 | 1200 | ||
| Tasks | Conditions | F1 (%) | aF1 (%) |
|---|---|---|---|
| Task 1: Speed detection | 1797 RPM | 100 | 100 |
| 1772 RPM | 100 | ||
| 1750 RPM | 100 | ||
| Task 2: Health type detection | NT | 100 | 100 |
| IRT | 100 | ||
| ORT | 100 | ||
| RT | 100 |
| Methods | Tasks | aF1 (%) | Improvement (Proposed − Reference Model) |
|---|---|---|---|
| WC + MTL | Task 1 | 96.21 | 100 − 96.21 = 3.79 |
| Task 2 | 97.43 | 100 − 97.43 = 2.57 | |
| TFI + CNN | Task 1 | 98.79 | 100 − 98.79 = 1.21 |
| Task 2 | 98.13 | 100 − 93.13 = 1.87 | |
| GI + CNN | Task 1 | 93.41 | 100 − 93.41 = 6.59 |
| Task 2 | 93.55 | 100 − 93.55 = 6.45 | |
| Proposed | Task 1 | 100 | - |
| Task 2 | 100 | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hasan, M.J.; Islam, M.M.M.; Kim, J.-M. Bearing Fault Diagnosis Using Multidomain Fusion-Based Vibration Imaging and Multitask Learning. Sensors 2022, 22, 56. https://doi.org/10.3390/s22010056
Hasan MJ, Islam MMM, Kim J-M. Bearing Fault Diagnosis Using Multidomain Fusion-Based Vibration Imaging and Multitask Learning. Sensors. 2022; 22(1):56. https://doi.org/10.3390/s22010056
Chicago/Turabian StyleHasan, Md Junayed, M. M. Manjurul Islam, and Jong-Myon Kim. 2022. "Bearing Fault Diagnosis Using Multidomain Fusion-Based Vibration Imaging and Multitask Learning" Sensors 22, no. 1: 56. https://doi.org/10.3390/s22010056