2.3.1. Establishment of Equivalent Circuit Model of Transformer Winding
At present, there are many studies on the transient circuit model of transformer winding at high frequency, mainly including the multi-conductor transmission line model that takes each turn of transformer winding as a transmission line, the uniform transmission line model that combines single-conductor and multi-conductor transmission lines, and the mixed model of a multi-conductor transmission line and concentrated parameter [
23,
24,
25,
26]. However, the calculation of a multi-conductor transmission line model is large, and the error of the uniform transmission line model is large. It is difficult to determine the parameters of components in the hybrid model. In Reference [
27], ANSYS Maxwell was used to establish the two-dimensional model of the transformer, and the inter-turn capacitance, inter-cake capacitance, radial capacitance, and inductance of the transformer winding were calculated. Then, the equivalent circuit model of the winding was established. By referring to this model, the transformer winding is equivalent to a two-port network composed of capacitance, inductance, and resistance [
28], as shown in
Figure 7.
The high-voltage side winding of the transformer is composed of 14 windings, and each disc unit includes series inductance , series resistance , longitudinal capacitance , longitudinal resistance , radial capacitance , and radial resistance . Series inductance represents the inductance of winding. Series resistance is the resistance of winding. The longitudinal capacitance is composed of inter-turn capacitance and inter-cake capacitance. Longitudinal resistance is the dielectric loss between winding turns or cakes. Radial capacitance consists of capacitance between winding and core, capacitance between winding and winding, and capacitance between winding and tank. Radial resistance is the dielectric loss between winding turns or cakes. The VFTO signal at the transformer winding inlet and the response signal at the output end are measured to calculate the frequency response curve.
2.3.2. Parameter Calculation of Transformer Winding Equivalent Circuit
The calculation formula of resistance per unit length of transformer winding turns is as follows:
In the formula, is the calculated frequency. is the permeability of a conductor. is the resistivity of the conductor. and are the two side lengths of the conductor’s rectangular section.
- 2.
Calculation of series inductance parameters
The frequency of VFTO is high. After the transformer is injected, the transformer core has little effect on the transmission of energy, so it can be ignored [
12,
13,
14]. Therefore, the winding of the transformer is equivalent to a hollow coil. The calculation formula of inductance of a hollow coil can be used to calculate inductance of winding. Since the average diameter of the winding is much larger than the thickness of the wire cake, the inductance of the winding is calculated by using the formula of the inductance calculated by the planar coil. The formula is as follows:
in the formula,
is the vacuum permeability.
is the number of turns of single-line cake.
is the average diameter of winding.
is the correlation function.
- 3
Calculation of Longitudinal Capacitance Parameters
The longitudinal capacitance includes inter-cake capacitance and inter-turn capacitance. Since the average diameter of the transformer coil is much larger than the width of the coil, the inter-turn capacitance
and inter-cake
capacitance can be obtained according to the calculation principle of the plate capacitance:
In the formula,
is the bare width of the axial wire.
is the total thickness of paper insulation.
is the dielectric constant of vacuum.
is the relative dielectric constant of paper insulation.
In the formula, is the equivalent dielectric constant of the inter-cake insulation. is the width of the line cake. is the insulation thickness between cakes.
- 4
Calculation of radial capacitance parameters
The radial capacitance
is composed of the capacitance between the winding and the core, the capacitance between the winding and the winding, and the capacitance between the winding and the tank. The calculation formula is as follows:
In the formula, is the equivalent dielectric constant of winding and core medium. is the axial height of winding. is the inner radius of winding. is the outer radius of the core.
The schematic diagram of the insulation between the winding pie of the transformer is shown in
Figure 8, and the calculation parameters in Formulas (4)–(8) are marked in the figure.
The relevant size parameters of a 500 kV transformer are shown in
Table 3. According to these parameters and formulas, the equivalent circuit parameters of transformer winding are calculated, as shown in
Table 4.
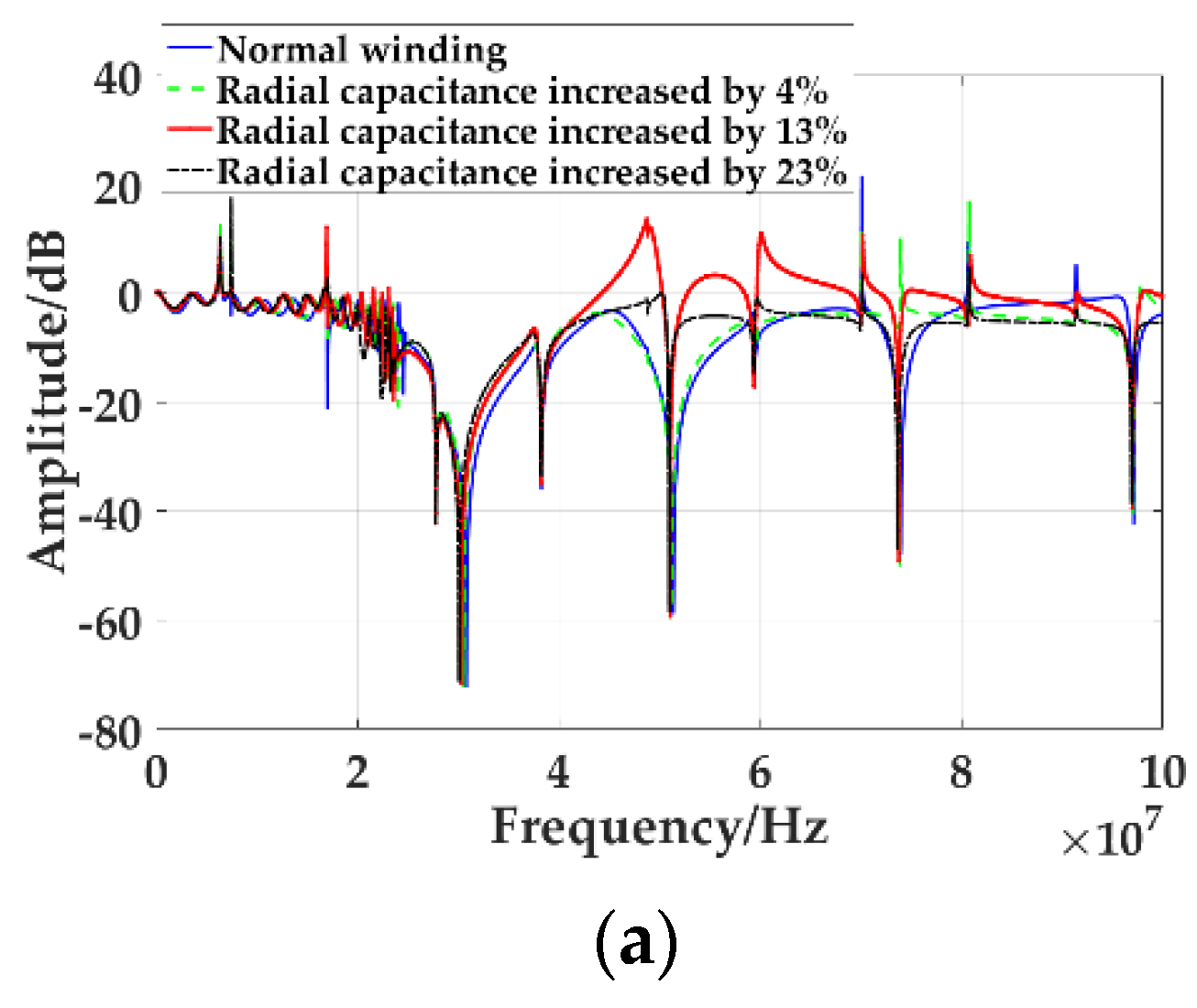
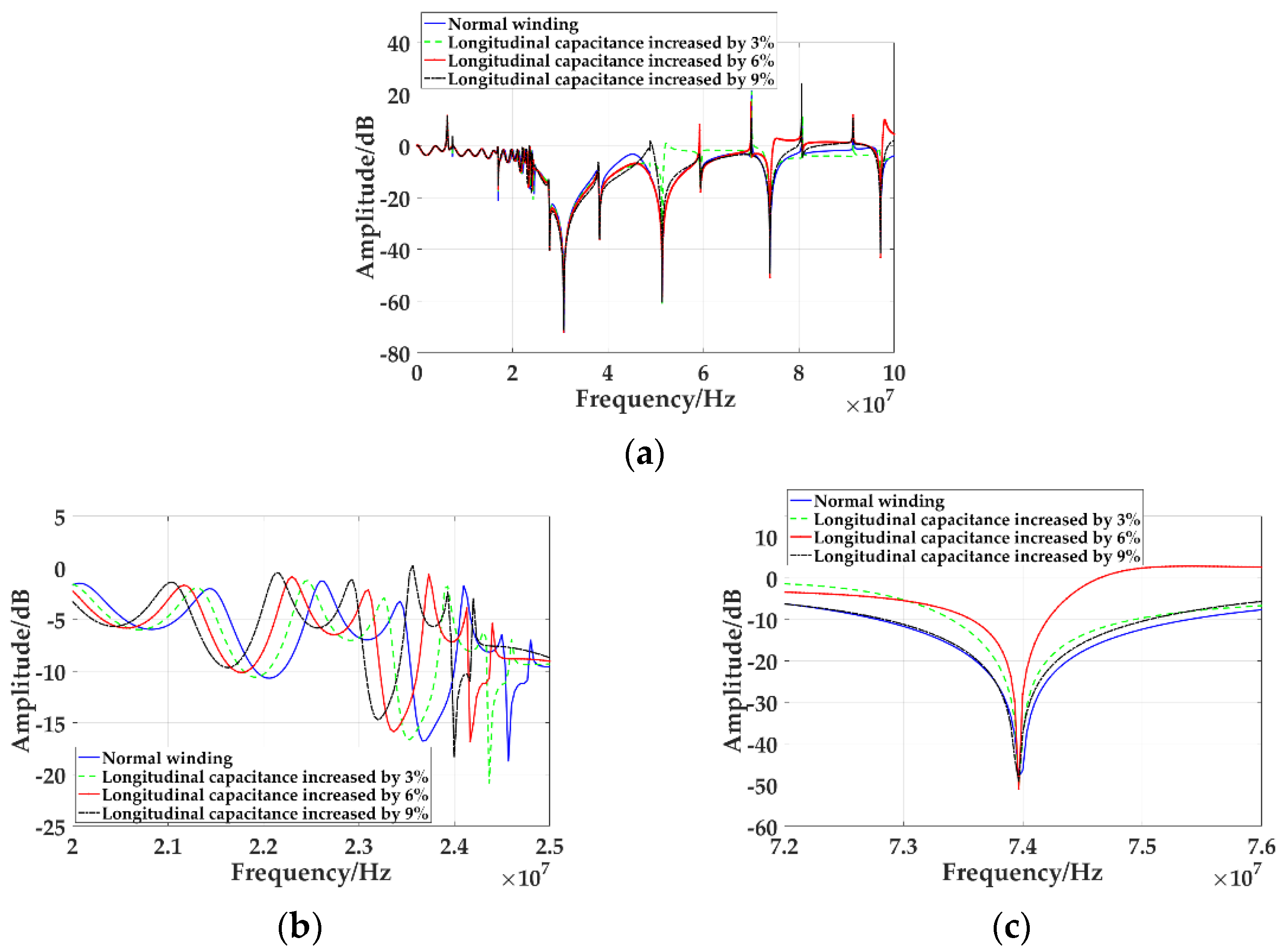
The change of transformer winding equivalent circuit parameters will affect its frequency response characteristics. Since the winding is composed of inductance, capacitance, and resistance, the phenomenon of multi-frequency resonance will occur in the transformer winding. The peak on the frequency response curve is due to the series resonance inside the transformer winding. The valley on the frequency response curve is due to the parallel resonance inside the transformer winding. For the determined transformer winding, the corresponding equivalent circuit parameters are constant; then, the frequency response curve is also uniquely determined. However, when the transformer winding deforms, the corresponding equivalent circuit parameters will change, which is reflected in the change of frequency or amplitude of the peak and trough on the frequency response curve. Therefore, the deformation type and degree of transformer winding can be analyzed through the change of the frequency response curve.
In Reference [
25], the variation of the equivalent circuit parameters of the winding corresponding to the faults of the winding axis deviation, radial deformation, and the change of inter-cake spacing is simulated, as shown in
Table 5. The fault diagram of winding axial offset, radial deformation, and disc spacing change is shown in
Figure 9. When the axial offset fault occurs in the high voltage winding, the capacitance between the high-voltage and low-voltage winding changes greatly. Since the distance between the high-voltage winding and the oil tank is far, the capacitance between the two changes little. Overall, the radial capacitance of the winding increases. When the radial deformation of the high voltage winding occurs, the winding will produce a plum blossom or drum-shaped deformation phenomenon. The series inductance and longitudinal capacitance increase with the deepening of the deformation degree. Since the capacitance between the high-voltage winding and the low-voltage winding decreases, and the capacitance between the tank increases, the two offset each other, so the radial capacitance value does not necessarily decrease with the increase of the deformation variable. When the transformer winding is subjected to axial electromagnetic force, the spacing between the winding wire cakes decreases, resulting in an increase in the capacitance between the cakes. Overall, the longitudinal capacitance increases.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




