
Application of a Drone Magnetometer System to Military Mine Detection in the Demilitarized Zone


Abstract
:1. Introduction
1.1. Unmanned Aerial Vehicle (UAV) System for Unexploded Ordnance (UXO) Detection
1.2. Aim and Scope
2. Experimental Materials
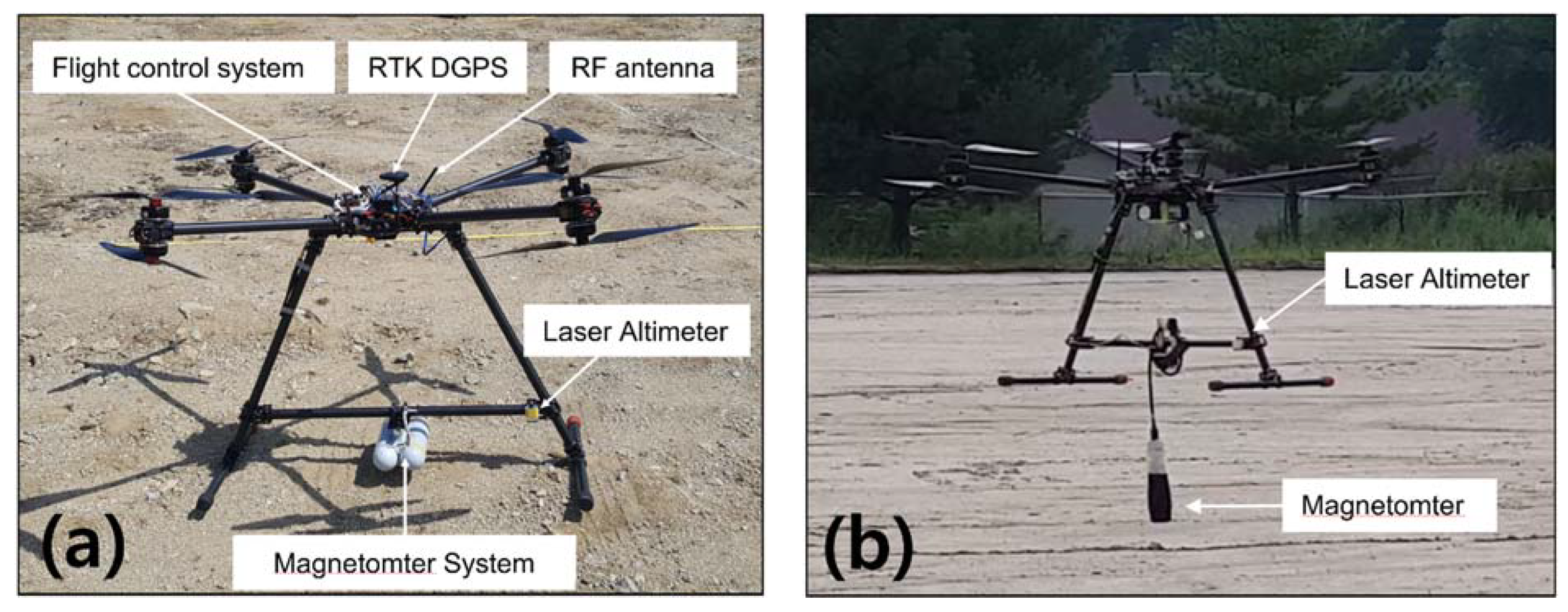
2.1. Drone System
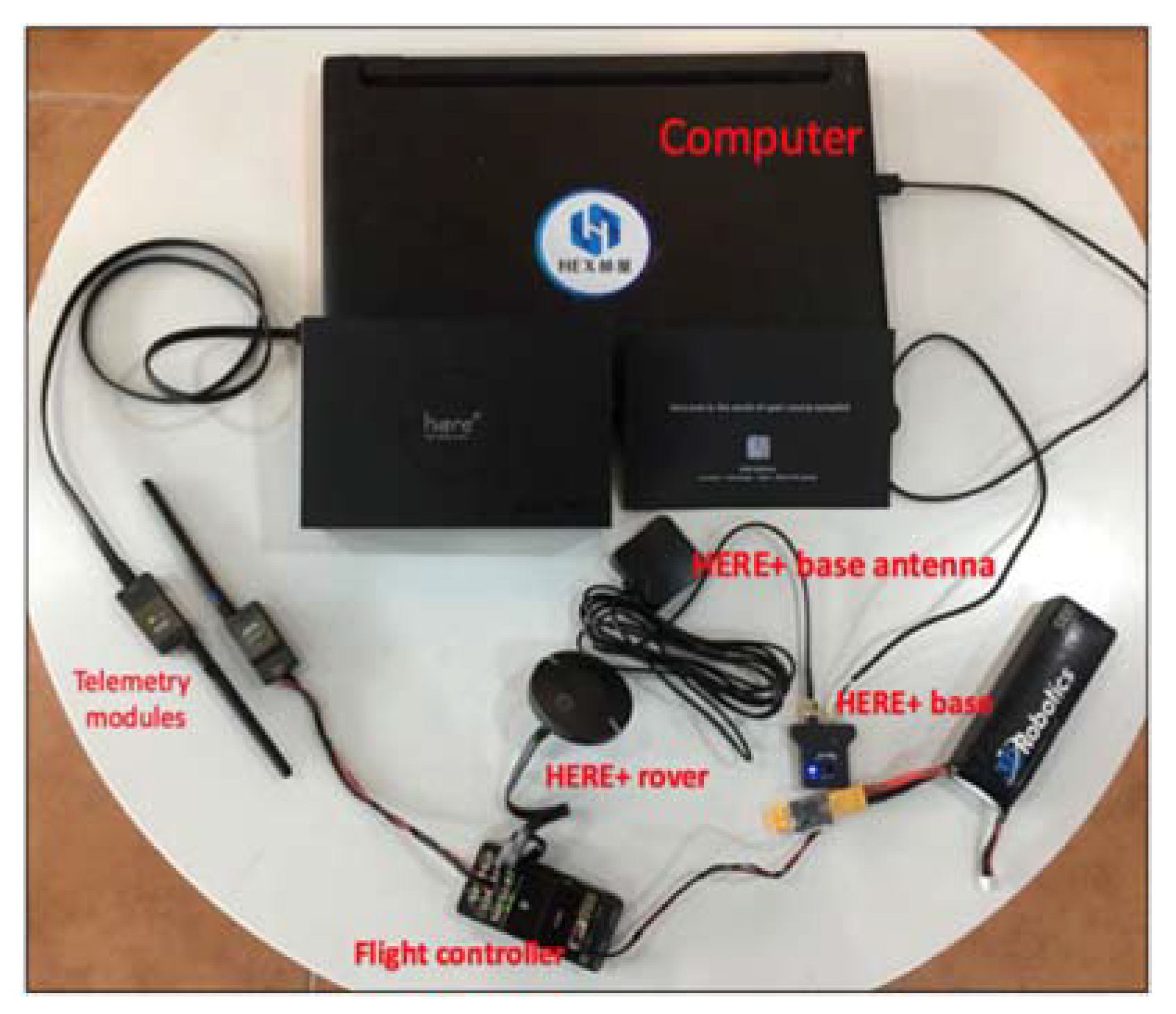
2.2. Real-Time Kinematic (RTK) System
2.3. Magnetometer
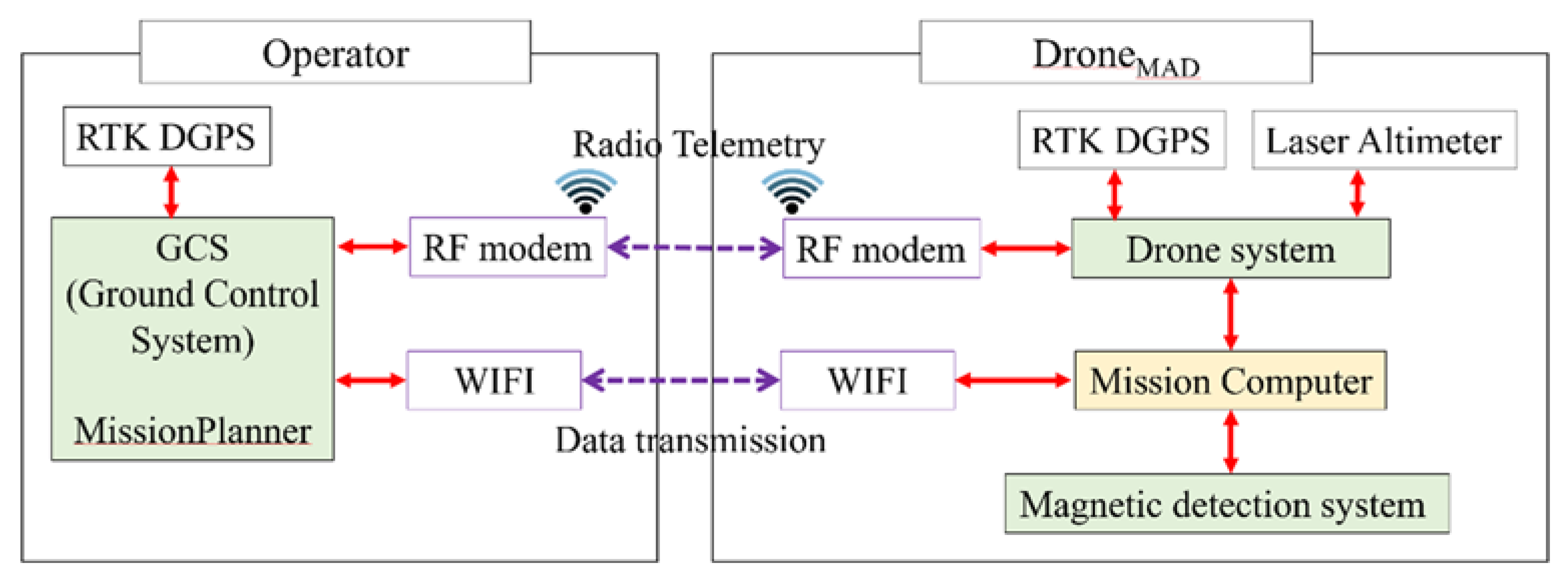
2.4. Radio Frequency (RF) Modem and Wireless Network (WiFi) Transmission
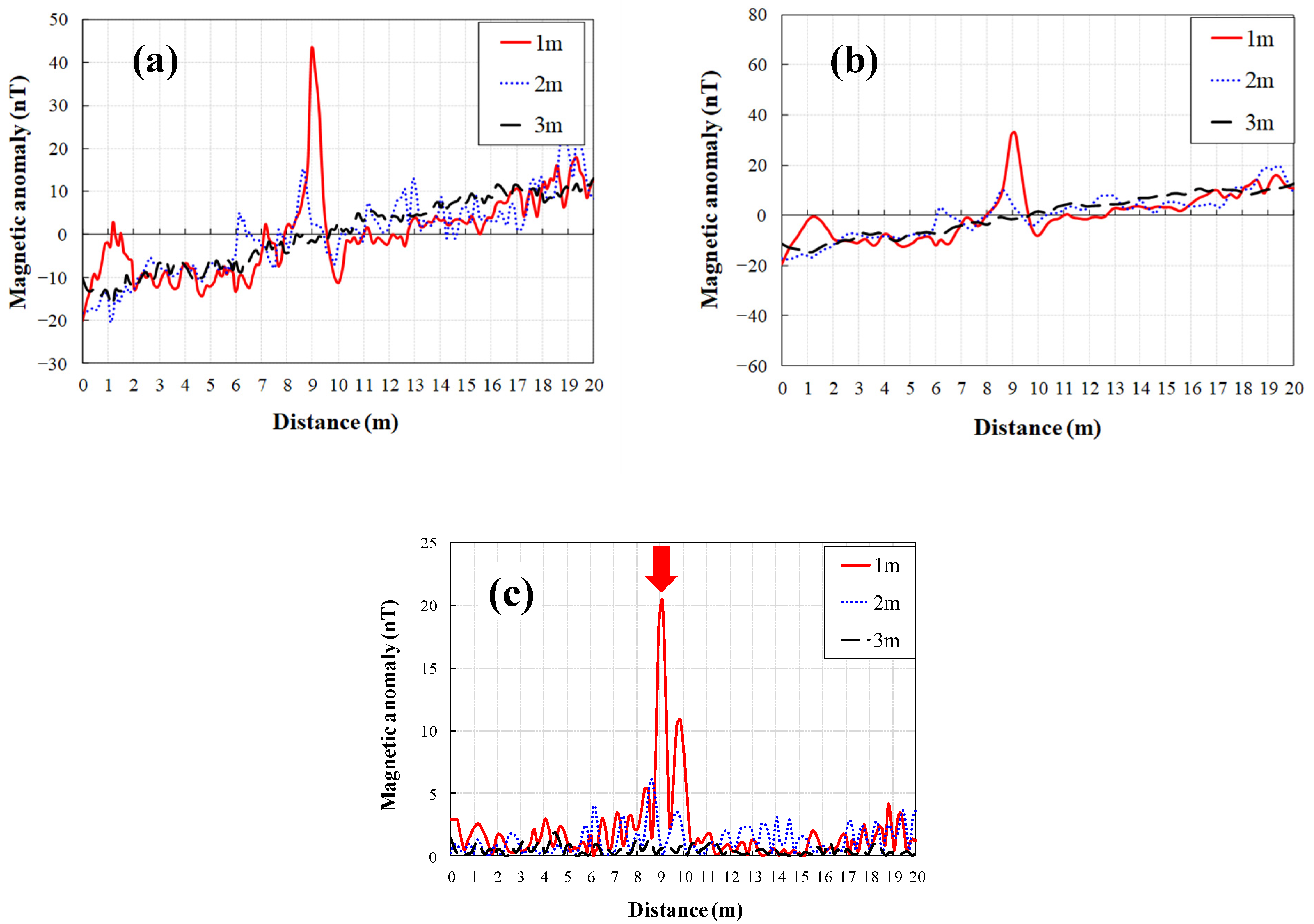
2.5. Altimeter Selection Experiment
3. Data Processing to Distinguish M16 Land Mines
4. Results and Discussions
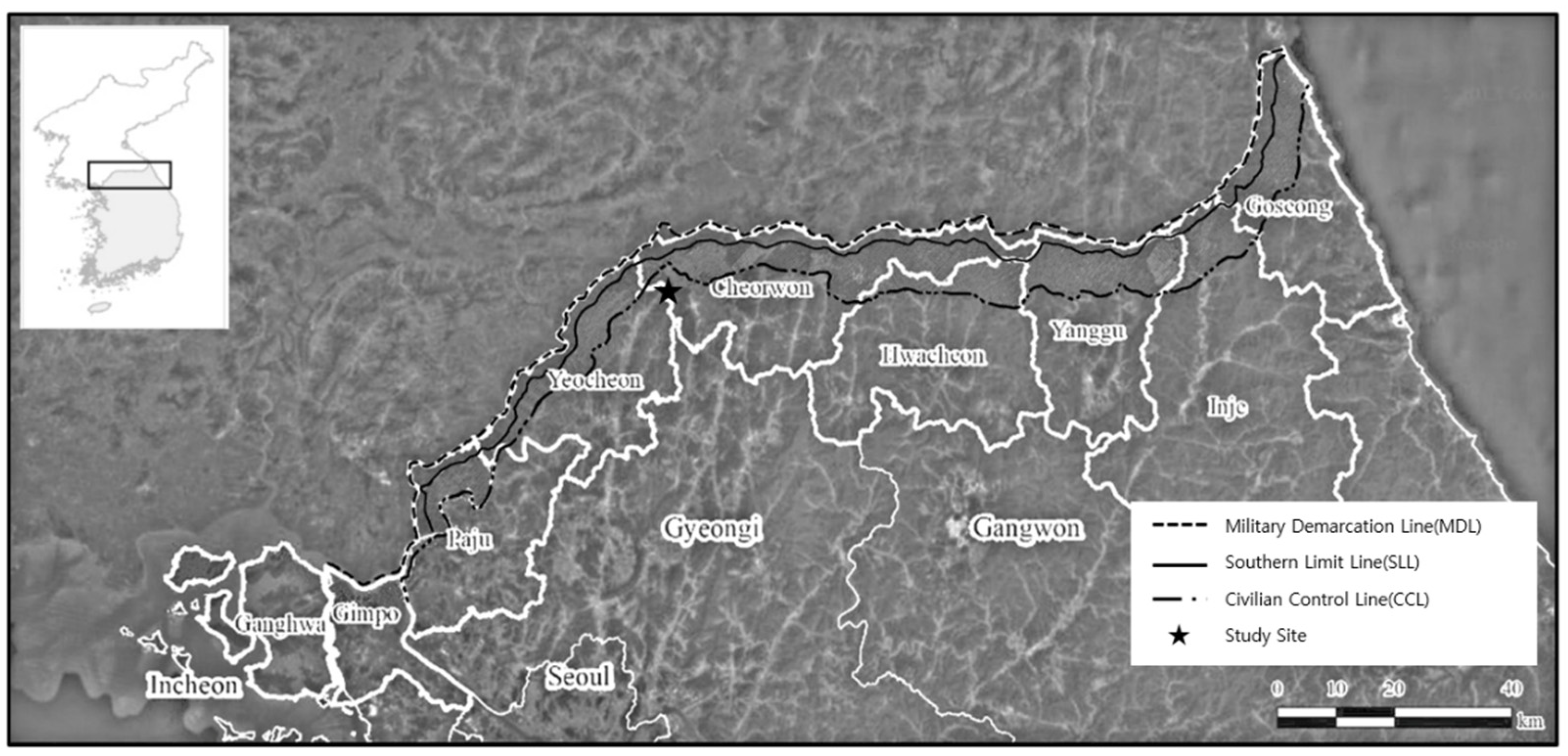
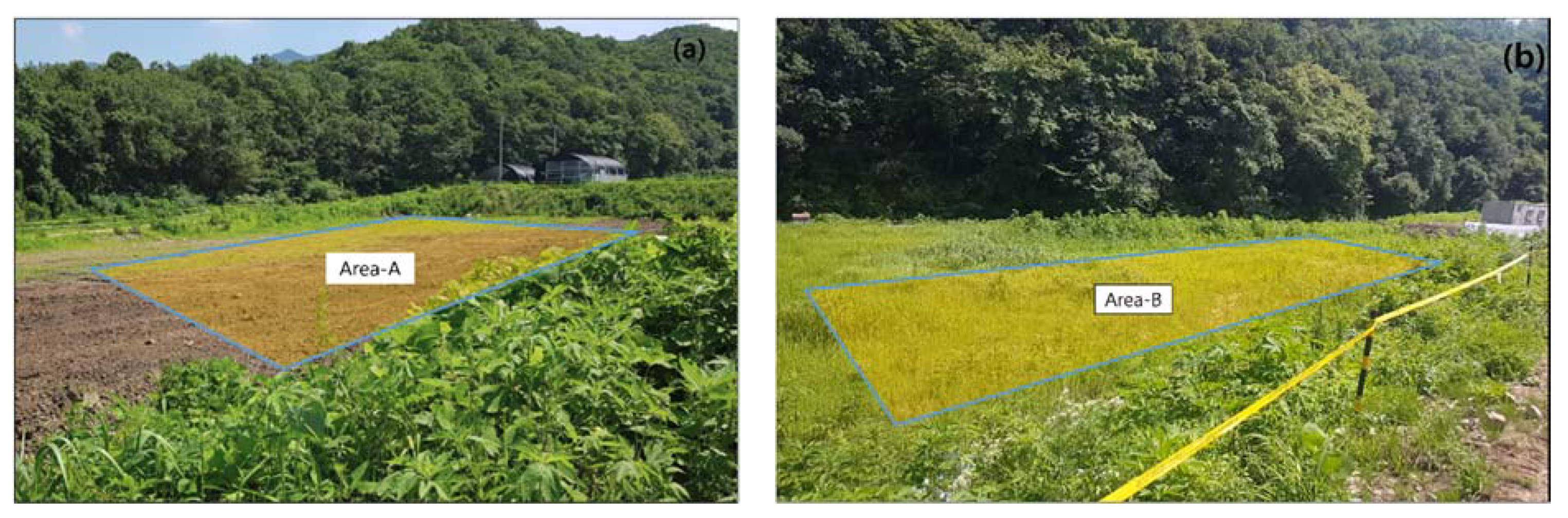
4.1. Site Introduction
4.2. Drone Flight
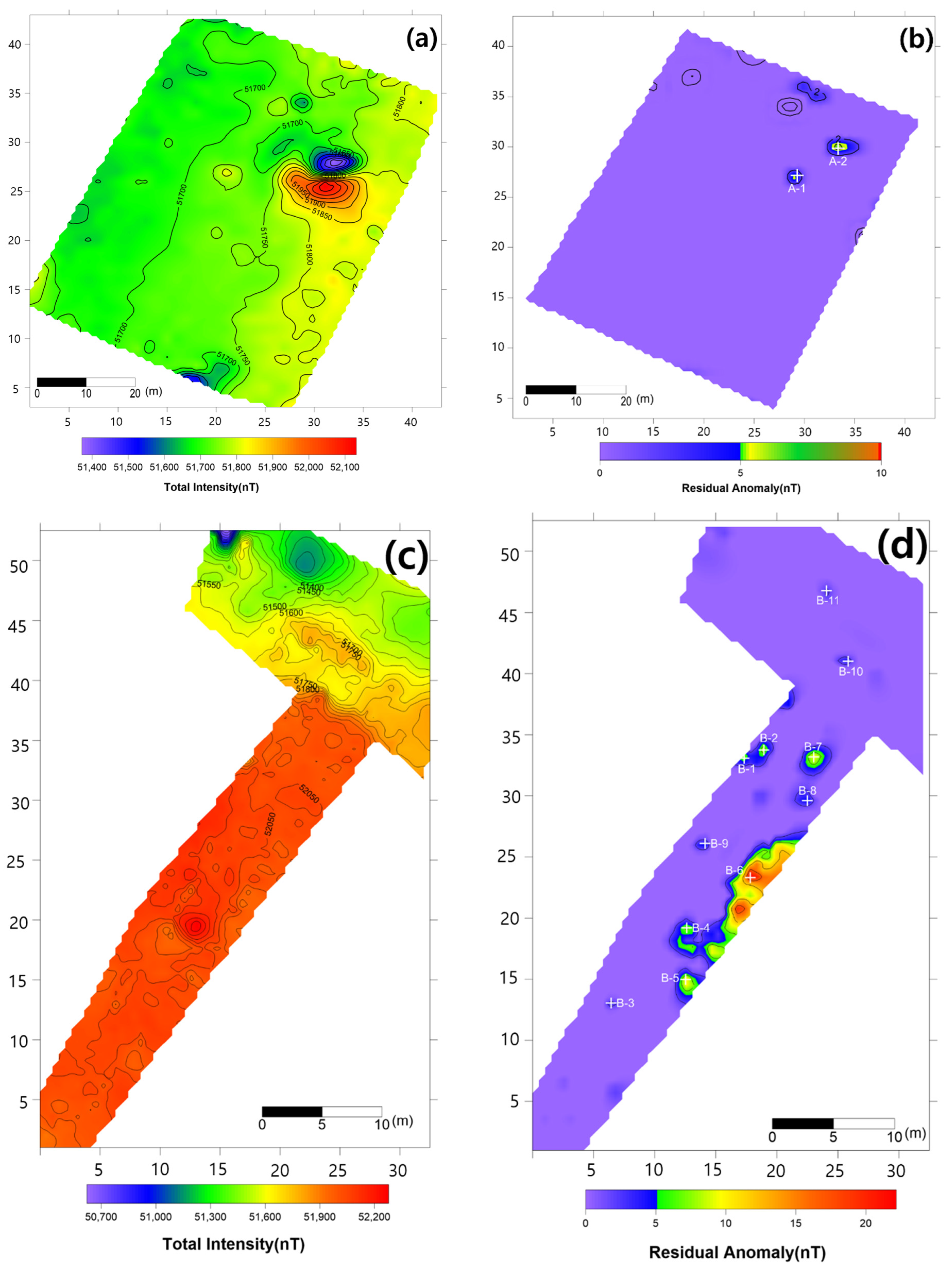
4.3. Magnetic Survey Results
4.4. Anomaly Detection and Military Identification Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Choi, S.R.; Park, E.J. Research on Estimating the Conservation Values of Major Resources in the Korean DMZ and its Vicinity. 2010. Available online: https://www.koreascience.or.kr/article/JAKO201017551614467.page (accessed on 15 March 2021).
- Park, J.; Lee, J. Spatial Pattern and Factor Analyses for Forest Sustainable Development Goals within South Korea’s Civilian Control Zone. Sustainability 2018, 10, 3500. [Google Scholar] [CrossRef] [Green Version]
- NIER. Ecological Survey Near DMZ—Ecological Survey over the Northern Region of Civilian Control Line to National Institute of Environmental Research. 2012. Available online: https://www.nier.go.kr/NIER/egovEngIndex.jsp (accessed on 15 March 2021).
- Kim, E. Toward an Anthropology of Landmines: Rogue Infrastructure and Military Waste in the Korean DMZ. Cult. Anthropol. 2016, 31, 162–187. [Google Scholar] [CrossRef]
- Greenwood, W.; Lynch, J.; Zekkos, D. Applications of UAVs in Civil Infrastructure. J. Infrastruct. Syst. 2019, 25, 04019002. [Google Scholar] [CrossRef]
- Irizarry, J.; Costa, D.B. Exploratory Study of Potential Applications of Unmanned Aerial Systems for Construction Management Tasks. J. Manag. Eng. 2016, 32, 05016001. [Google Scholar] [CrossRef]
- de Melo, R.R.S.; Costa, D.B.; Álvares, J.S.; Irizarry, J. Applicability of unmanned aerial system (UAS) for safety inspection on construction sites. Saf. Sci. 2017, 98, 174–185. [Google Scholar] [CrossRef]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Zhou, S.; Gheisari, M. Unmanned aerial system applications in construction: A systematic review. Constr. Innov. Inf. Process Manag. 2018, 18, 453–468. [Google Scholar] [CrossRef]
- Barbedo, J. A Review on the Use of Unmanned Aerial Vehicles and Imaging Sensors for Monitoring and Assessing Plant Stresses. Drones 2019, 3, 40. [Google Scholar] [CrossRef] [Green Version]
- Hassler, S.C.; Baysal-Gurel, F. Unmanned Aircraft System (UAS) Technology and Applications in Agriculture. Agronomy 2019, 9, 618. [Google Scholar] [CrossRef] [Green Version]
- Mogili, U.R.; Deepak, B.B.V.L. Review on Application of Drone Systems in Precision Agriculture. Procedia Comput. Sci. 2018, 133, 502–509. [Google Scholar] [CrossRef]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A review on UAV-based applications for precision agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef] [Green Version]
- Manfreda, S.; McCabe, M.; Miller, P.; Lucas, R.; Madrigal, V.P.; Mallinis, G.; Ben-Dor, E.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the Use of Unmanned Aerial Systems for Environmental Monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef] [Green Version]
- Villa, T.; Gonzalez, L.F.; Miljievic, B.; Ristovski, Z.; Morawska, L. An Overview of Small Unmanned Aerial Vehicles for Air Quality Measurements: Present Applications and Future Prospectives. Sensors 2016, 16, 1072. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Linchant, J.; Lisein, J.; Semeki, J.; Lejeune, P.; Vermeulen, C. Are unmanned aircraft systems (UASs) the future of wildlife monitoring? A review of accomplishments and challenges. Mammal Rev. 2015, 45, 239–252. [Google Scholar] [CrossRef]
- Rees, A.; Avens, L.; Ballorain, K.; Bevan, E.; Broderick, A.; Carthy, R.; Christianen, M.; Duclos, G.; Heithaus, M.R.; Johnston, D.; et al. The potential of unmanned aerial systems for sea turtle research and conservation: A review and future directions. Endanger. Species Res. 2017, 35, 81–100. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.; Shao, Q.; Yue, H. Surveying Wild Animals from Satellites, Manned Aircraft and Unmanned Aerial Systems (UASs): A Review. Remote Sens. 2019, 11, 1308. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.; Choi, Y. Reviews of unmanned aerial vehicle (drone) technology trends and its applications in the mining industry. Geosyst. Eng. 2016, 19, 197–204. [Google Scholar] [CrossRef]
- Park, S.; Choi, Y. Applications of Unmanned Aerial Vehicles in Mining from Exploration to Reclamation: A Review. Minerals 2020, 10, 663. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. Towards the Internet of Flying Robots: A Survey. Sensors 2018, 18, 4038. [Google Scholar] [CrossRef] [Green Version]
- Kanellakis, C.; Nikolakopoulos, G. Survey on Computer Vision for UAVs: Current Developments and Trends. J. Intell. Robot. Syst. 2017, 87, 141–168. [Google Scholar] [CrossRef] [Green Version]
- Nikulin, A.; De Smet, T.; Baur, J.; Frazer, W.; Abramowitz, J. Detection and Identification of Remnant PFM-1 ‘Butterfly Mines’ with a UAV-Based Thermal-Imaging Protocol. Remote Sens. 2018, 10, 1672. [Google Scholar] [CrossRef] [Green Version]
- Colorado, J.; Perez, M.; Mondragon, I.; Mendez, D.; Parra, C.; Devia, C.; Martinez-Moritz, J.; Neira, L. An integrated aerial system for landmine detection: SDR-based Ground Penetrating Radar onboard an autonomous drone. Adv. Robot. 2017, 31, 791–808. [Google Scholar] [CrossRef]
- Garcia-Fernandez, M.; Lopez, Y.; Arboleya, A.; Gonzalez-Valdes, B.; Rodriguez-Vaqueiro, Y.; Andrés, F.L.-H.; Garcia, A.P. Synthetic Aperture Radar Imaging System for Landmine Detection Using a Ground Penetrating Radar on Board a Unmanned Aerial Vehicle. IEEE Access 2018, 6, 45100–45112. [Google Scholar] [CrossRef]
- Sipos, D.; Gleich, D. A Lightweight and Low-Power UAV-Borne Ground Penetrating Radar Design for Landmine Detection. Sensors 2020, 20, 2234. [Google Scholar] [CrossRef] [Green Version]
- Pochanin, G.; Capineri, L.; Bechtel, T.; Ruban, V. Radar Systems for Landmine Detection. In Proceedings of the 2020 IEEE Ukrainian Microwave Week, Kharkiv, Ukraine, 21–25 September 2020. [Google Scholar]
- Solla, M.; Pérez-Gracia, V.; Fontul, S. A Review of GPR Application on Transport Infrastructures: Troubleshooting and Best Practices. Remote Sens. 2021, 13, 672. [Google Scholar] [CrossRef]
- Ardekani, M.R.M.; Jacques, D.C.; Lambot, S. A Layered Vegetation Model for GPR Full-Wave Inversion. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 18–28. [Google Scholar] [CrossRef]
- Macharet, D.G.; Perez-Imaz, H.I.A.; Rezeck, P.A.F.; Potje, G.A.; Benyosef, L.C.C.; Wiermann, A.; Freitas, G.M.; Garcia, L.G.U.; Campos, M.F.M. Autonomous Aeromagnetic Surveys Using a Fluxgate Magnetometer. Sensors 2016, 16, 2169. [Google Scholar] [CrossRef] [Green Version]
- Jackisch, R.; Lorenz, S.; Kirsch, M.; Zimmermann, R.; Tusa, L.; Pirttijärvi, M.; Saartenoja, A.; Ugalde, H.; Madriz, Y.; Savolainen, M.; et al. Integrated Geological and Geophysical Mapping of a Carbonatite-Hosting Outcrop in Siilinjärvi, Finland, Using Unmanned Aerial Systems. Remote Sens. 2020, 12, 2998. [Google Scholar] [CrossRef]
- Walter, C.; Braun, A.; Fotopoulos, G. High-resolution unmanned aerial vehicle aeromagnetic surveys for mineral exploration targets. Geophys. Prospect. 2019, 68, 334–349. [Google Scholar] [CrossRef]
- Walter, C.; Braun, A.; Fotopoulos, G. Spectral Analysis of Magnetometer Swing in High-Resolution UAV-borne Aeromagnetic Surveys. In Proceedings of the 2019 IEEE Systems and Technologies for Remote Sensing Applications Through Unmanned Aerial Systems (STRATUS), Rochester, NY, USA, 25–27 February 2019; pp. 1–4. [Google Scholar]
- Guerrero-Sánchez, M.-E.; Hernández-González, O.; Lozano, R.; García-Beltrán, C.-D.; Valencia-Palomo, G.; López-Estrada, F.-R. Energy-Based Control and LMI-Based Control for a Quadrotor Transporting a Payload. Mathematics 2019, 7, 1090. [Google Scholar] [CrossRef] [Green Version]
- Barikbin, B.; Fakharian, A. Trajectory tracking for quadrotor UAV transporting cable-suspended payload in wind presence. Trans. Inst. Meas. Control 2019, 41, 1243–1255. [Google Scholar] [CrossRef]
- Mu, Y.; Zhang, X.; Xie, W.; Zheng, Y. Automatic Detection of Near-Surface Targets for Unmanned Aerial Vehicle (UAV) Magnetic Survey. Remote Sens. 2020, 12, 452. [Google Scholar] [CrossRef] [Green Version]
- Gailler, L.; Labazuy, P.; Régis, E.; Bontemps, M.; Souriot, T.; Bacques, G.; Carton, B. Validation of a New UAV Magnetic Prospecting Tool for Volcano Monitoring and Geohazard Assessment. Remote. Sens. 2021, 13, 894. [Google Scholar] [CrossRef]
- Ganesh, Y.; Raju, R.; Hegde, R. Surveillance Drone for Landmine Detection. In Proceedings of the 2015 International Conference on Advanced Computing and Communications (ADCOM), Chennai, India, 18–20 September 2015; pp. 33–38. [Google Scholar]
- Yoo, L.-S.; Lee, J.-H.; Ko, S.-H.; Jung, S.-K.; Lee, S.-H.; Lee, Y.-K. A Drone Fitted With a Magnetometer Detects Landmines. IEEE Geosci. Remote Sens. Lett. 2020, 17, 2035–2039. [Google Scholar] [CrossRef]
- Jiang, D.; Zeng, Z.; Zhou, S.; Guan, Y.; Lin, T. Integration of an Aeromagnetic Measurement System Based on an Unmanned Aerial Vehicle Platform and Its Application in the Exploration of the Ma’anshan Magnetite Deposit. IEEE Access 2020, 8, 189576–189586. [Google Scholar] [CrossRef]
- Coyle, M.; Dumont, R.; Keating, P.; Kiss, F.; Miles, W. Geological Survey of Canada aeromagnetic surveys: Design, Quality Assurance, And Data Dissemination. Can. Geol. 2014. [Google Scholar] [CrossRef]
- Gavazzi, B.; Le Maire, P.; De Lépinay, J.M.; Calou, P.; Munschy, M. Fluxgate three-component magnetometers for cost-effective ground, UAV and airborne magnetic surveys for industrial and academic geoscience applications and comparison with current industrial standards through case studies. Géoméch. Energy Environ. 2019, 20, 100117. [Google Scholar] [CrossRef]
- Munschy, M.; Boulanger, D.; Ulrich, P.; Bouiflane, M. Magnetic mapping for the detection and characterization of UXO: Use of multi-sensor fluxgate 3-axis magnetometers and methods of interpretation. J. Appl. Geophys. 2007, 61, 168–183. [Google Scholar] [CrossRef]
- Geometrics. How Does Magnetometer Noise Vary with Sample Rate? 2018. Available online: https://www.geometrics.com/support/how-does-magnetometer-noise-vary-with-sample-rate/ (accessed on 1 April 2021).
- Yoo, S.; Lee, K.S.; Park, C.-H. Landscape Ecological Evaluation for Avian Fauna Habitats at the Forest Swamp Minefields of Civilian Control Zone (CCZ) Close to the Demilitarized Zone (DMZ) of Korea. Korean J. Environ. Ecol. 2012, 26, 247–256. [Google Scholar]
- Ranđelović, D.M.; Vorotović, G.S.; Bengin, A.Č.; Petrović, P.N. Quadcopter altitude estimation using low-cost barometric, infrared, ultrasonic and LIDAR sensors. FME Trans. 2021, 49, 21–28. [Google Scholar] [CrossRef]
- Hentschke, M.; Freitas, E.P.; Hennig, C.H.; da Veiga, I.C.G. In Evaluation of Altitude Sensors for a Crop Spraying Drone. Drones 2018, 2, 25. [Google Scholar] [CrossRef] [Green Version]
- Choi, K.-S.; Hyun, J.-W.; Jang, J.-W.; Ahn, D.-M.; Hong, G.-Y. Ground Altitude Measurement Algorithm using Laser Altimeter and Ultrasonic Rangefinder for UAV. J. Adv. Navig. Technol. 2013, 17, 749–756. [Google Scholar] [CrossRef] [Green Version]
- Moskowitz, B.; Jackson, M.; Chandler, V. Geophysical Properties of the Near-Surface Earth: Magnetic Properties. In Treatise on Geophysics; Elsevier: Amsterdam, The Netherlands, 2015. [Google Scholar]
- Ofstad, F.; Stampolidis, A. Helicopter-Borne Magnetic and Radiometric Geophysical Survey in the Altevann Area, Bardu and Målselv Municipalities, Troms; Geological Survey of Norway: Troms, Norway, 2014. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specifications | LW20 | SF11c |
|---|---|---|
| Type | laser | laser |
| Resolution | 1 cm | 1 cm |
| Accuracy | <10 cm | <10 cm |
| Power | 2 mW | 15 mW |
| Range | <100 m | <120 m |
| Weight | 20 g | 35 g |
| Beam Angle | <0.5° | <0.2° |
| price | 425 USD | 390 USD |
| Areas | Location (m) | Anomaly | Photo | Objects | |
|---|---|---|---|---|---|
| x | y | nT | |||
| A-1 | 28.29 | 24.15 | 5.39 |  | Rebar |
| A-2 | 32.37 | 26.85 | 6.45 |  | artillery shells |
| B-1 | 17.32 | 32.07 | 6.21 |  | can |
| B-2 | 18.94 | 32.75 | 8.01 |  | can |
| B-3 | 6.43 | 12.05 | 2.17 | - | none |
| B-4 | 12.62 | 18.2 | 7.6 |  | artillery shells |
| B-5 | 12.53 | 13.98 | 10 |  | motor |
| B-6 | 17.83 | 22.31 | 21.2 |  | Metal Pipes |
| B-7 | 23.02 | 32.18 | 9.44 |  | Construction waste |
| B-8 | 22.5 | 28.61 | 5.13 |  | Rebar |
| B-9 | 14.12 | 25.11 | 3.76 | - | none |
| B-10 | 25.84 | 40.01 | 3.06 | - | none |
| B-11 | 24.07 | 45.78 | 2.36 | - | none |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yoo, L.-S.; Lee, J.-H.; Lee, Y.-K.; Jung, S.-K.; Choi, Y. Application of a Drone Magnetometer System to Military Mine Detection in the Demilitarized Zone. Sensors 2021, 21, 3175. https://doi.org/10.3390/s21093175
Yoo L-S, Lee J-H, Lee Y-K, Jung S-K, Choi Y. Application of a Drone Magnetometer System to Military Mine Detection in the Demilitarized Zone. Sensors. 2021; 21(9):3175. https://doi.org/10.3390/s21093175
Chicago/Turabian StyleYoo, Lee-Sun, Jung-Han Lee, Yong-Kuk Lee, Seom-Kyu Jung, and Yosoon Choi. 2021. "Application of a Drone Magnetometer System to Military Mine Detection in the Demilitarized Zone" Sensors 21, no. 9: 3175. https://doi.org/10.3390/s21093175