1. Introduction
In recent decades, unmanned aerial vehicles (UAVs) have seen increasing interest within the research communities and industry due to their potential for numerous applications including, for instance, inspection, surveillance, data acquisition, and military applications. Their potential future applications include search and rescue, border patrol, surveillance of wildfires, surveillance of traffic and land surveys. An important type of UAVs are quadrotors, which have useful properties such as a simple structure, and low operation and manufacturing costs [
1,
2]. Numerous control methods have been proposed in order to tackle the quadrotor stability problem, see, e.g., [
3,
4,
5,
6].
In many of the aforementioned applications of quadrotors, designing an attitude controller with high level of performance and reliability is crucial. In the existing literature, a typical method of estimating the quadrotor’s attitude assumes that the angular velocity measurements are required. However, the velocity measurements in quadrotors can be noisy or even not available. Furthermore, using observer-based methods to reconstruct the angular velocity normally lead to inaccurate estimation of the velocity and, hence, degrade the attitude control performance [
7,
8,
9,
10]. This suggests using direct measurements of the attitude rather than indirect estimations.
Theoretically, different methods can be used to measure the attitude of the quadrotor such as: Euler angles, direction cosine matrices, and quaternions. However, the Euler angles have the advantage of being more physically sensible and easier to use, as each of the three Euler angles represents elementary rotations around the three principles axes of the quadrotor: roll, pitch, and yaw. Euler angles can be determined directly based on measurements earth’s magnetic field on the three body axes of the quadrotor. Sensors like AMR (anisotropic magneto resistive) magnetometers [
11] are used to measure earth’s magnetic field.
Motivated by the forgoing, we aim in this paper to design an attitude control scheme for quadrotor systems where the angular velocity measurements or a model-based observer reconstructing the angular velocity are not required. The proposed approach rely on using the nonlinear negative imaginary systems framework, which is recently developed in [
12] for nonlinear systems which are passive from the input to the derivative of the output (rather than the output as in the classical passivity theory). The nonlinear negative imaginary property of the quadrotor system will be established, and we shall employ the stability robustness results of [
12] to design a velocity-free attitude controller by direct use of the Euler angles. For future work, the nonlinear negative imaginary approach can be employed or combined with other techniques as in [
13,
14,
15] to provide the full flight control to quadrotor systems.
The rest of the paper is organized as follows: In
Section 2, main related definitions and robust stability results from the linear/nonlinear negative imaginary literature are reviewed. In
Section 3, we use the Euler–Lagrange dynamics of quadrotors systems to establish the nonlinear negative imaginary property of these systems. We use in
Section 4, an inner-outer loop technique to design a velocity-free stabilizing controller for the attitude of quadrotors based on recently obtained nonlinear NI stability results. Finally, in
Section 5, simulation results and some concluding remarks along with future directions are provided.
2. Preliminaries
Negative imaginary (NI) systems theory has been introduced in [
16] for the control of flexible structures with colocated force actuators and position sensors. NI systems theory has seen significant progress in theory and application in the last decade, see for instance [
17,
18]. In this section, we review some of the related definitions and stability results from the NI literature in both the linear and nonlinear case.
2.1. Negative Imaginary Systems: Linear Case
We consider here the following linear time invariant (LTI) system:
where the matrices
,
, and
. Assume that the system (1) and (2) has the
real-rational proper transfer function
. The frequency domain characterization of the NI property of the above LTI system is given in the following definition.
Definition 1 ([
19])
. A square transfer function matrix is called negative imaginary if the following conditions are satisfied:- 1.
has no pole at the origin and in ;
- 2.
For all , such that is not a pole of , and ;
- 3.
If ; , is a pole of , it is at most a simple pole and the residue matrix is positive semidefinite Hermitian.
A linear time invariant system of the form (1) and (2) is NI if its transfer function is NI. An equivalent time-domain definition of the NI property for the LTI system (1) and (2) is given in the following lemma.
Lemma 1. Suppose that the system (1) and (2) (with ) is controllable and observable. Then, is negative imaginary if and only if there exists matrix P as in LMI (4) such that along the trajectories of the system, the function satisfies A strict notion of the negative imaginary property of the above LTI system is provided in the following definition.
Definition 2 ([
19])
. A square transfer function matrix is strictly negative imaginary (SNI) if:- 1.
has no poles in ;
- 2.
for .
The next two lemmas provide a state-space characterization of the NI and SNI properties for the LTI system (1) and (2), respectively.
Lemma 2 ([
20])
. Let be a minimal state-space realization of the transfer function matrix . Then is negative imaginary if and only if , and there exist matrices , , and such that the following LMI is satisfied: Lemma 3 ([
21])
. Let be a minimal state-space realization of the transfer function matrix . Then is strictly negative imaginary if and only if:- 1.
, ;
- 2.
there exists a matrix , such that - 3.
the transfer function matrix has full column rank at for any where . That is, rank for any .
The stability robustness of a positive feedback interconnection of NI system is established in the following theorem:
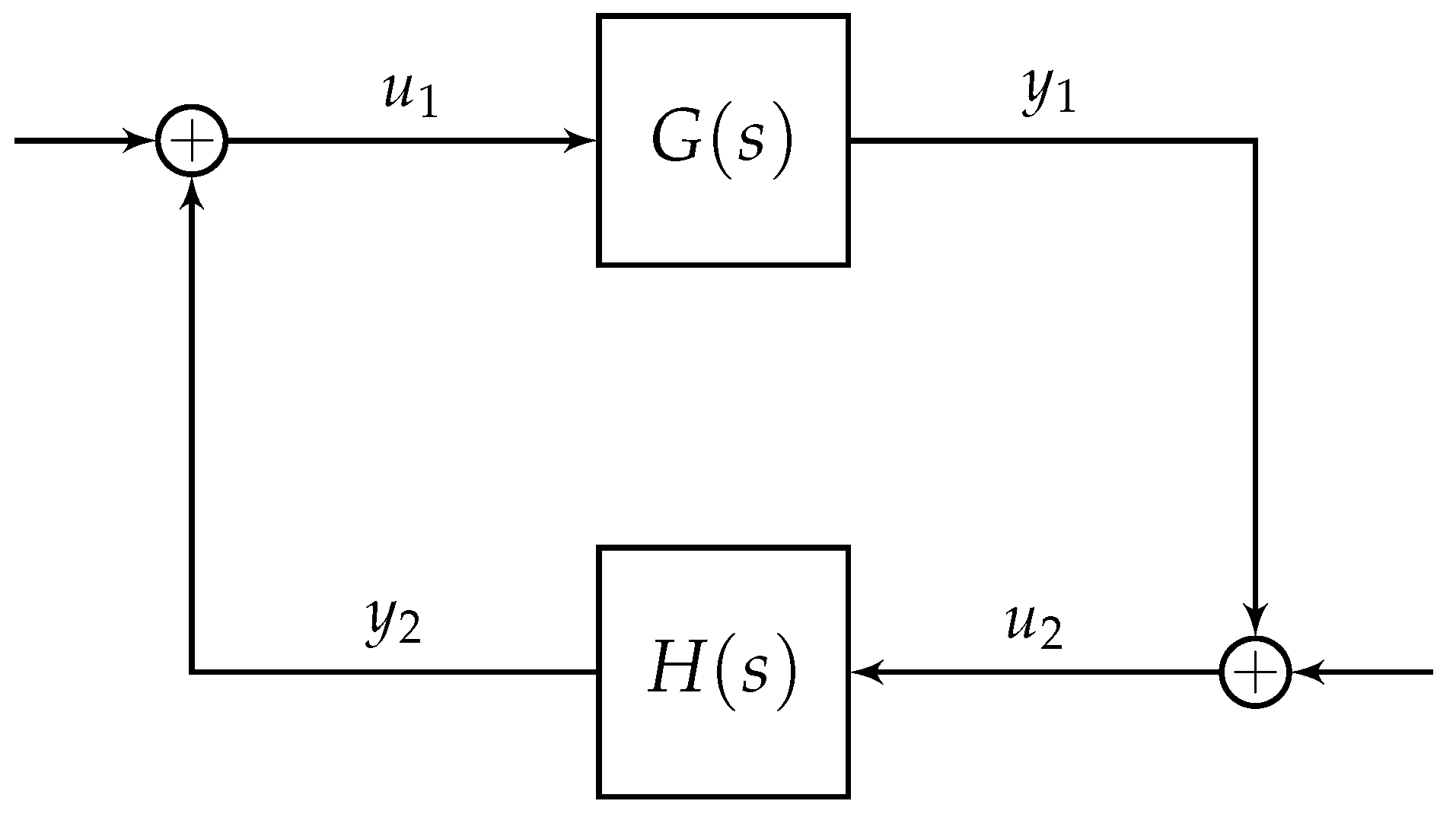
Theorem 1. [16] Assume is a negative imaginary system with no poles at the origin and is a strictly negative imaginary system such that and . Then, the positive feedback interconnection of and , as in Figure 1, is internally stable if and only ifwhere denotes the maximum eigenvalue of a matrix with only real eigenvalues. 2.2. Nonlinear Negative Imaginary Systems
In [
12], negative imaginary systems theory has been recently generalized to nonlinear systems. Here, we review the main definitions and stability results of nonlinear negative imaginary systems. We consider the following multi-input multi-output (MIMO) general nonlinear system of the form
where
is Lipschitz continuous function and
is continuously differentiable function. The following definitions give a time-domain characterization of the nonlinear negative imaginary property of the nonlinear system (5) and (6).
Definition 3 ([
12])
. The system (5) and (6) is said to be nonlinear negative imaginary if there exists a non-negative function of a class such that the following dissipative inequalityholds for all . Here, the function V is called a storage function. Analogously to [
22] for passive systems, we introduce a slightly stronger notions of the above definition for the purpose of stability analysis. We have the following two definitions.
Definition 4 ([
12])
. The system (5) and (6) is said to be a marginally strictly nonlinear NI system if the dissipative inequality (7) is satisfied, and for all and such thatfor all , then , and is a constant vector. Definition 5 ([
12])
. The system (5) and (6) is said to be weakly strictly nonlinear NI system if it is marginally strictly nonlinear NI and globally asymptotically stable with . Remark 1. For LTI systems of the form (1) and (2), weakly strictly nonlinear negative imaginary property becomes strictly negative imaginary property. This can be readily seen by considering a positive definite storage function as , where x is the state vector of the system and the matrix P is positive definite symmetric matrix which satisfies the LMI (4). Differentiating V with respect to time, we have , where is the output of the auxiliary system given by which has no zeros on the imaginary axis except at the origin (see Lemma 3). Since the system is stable, can consist only of exponentially decaying terms and sinusoids (including zero frequency). Note that . The condition that has no zeros on the imaginary axis implies it is not zero for all , which guarantees the convergence of to a (possibly zero) constant.
In what follows, we highlight the main robust stability result introduced in [
12] for the positive feedback interconnection of two nonlinear NI systems. This nonlinear stability result will be used later to robustly stabilize the attitude of the quadrotor system.
Now, consider the following general two MIMO nonlinear systems described by:
and
where
is a
function with
,
is continuous and locally Lipschitz in
for bounded
, and where
. We shall consider the open-loop interconnection of the systems
and
as shown in
Figure 2. This interconnected system determines the stability properties of the closed-loop system, see [
12]. We have the following assumptions for the open-loop interconnection of systems
and
.
Assumption 1. For any constant , there exists a unique solution to the equationssuch that implies and the mapping is continuous. Assumption 2. For any constant , there exists a unique solution to the equationssuch that implies and the mapping is continuous. Assumption 3. , for any constant where .
Assumption 4. For any constant , let be defined as in Assumption 1 and be defined as in Assumption 2 where . Then there exits a constant such that for any and with defined as in Assumption 2, the following sector bound condition:holds. The stability robustness of the positive feedback interconnections of systems and has been given in the next theorem using the Lyapunov theory and the LaSalle’s invariance principal.
Theorem 2 ([
12])
. Consider a positive feedback interconnection of systems and where , . Suppose that the system is nonlinear NI and zero-state observable, and the system is weakly strictly nonlinear NI. Moreover, suppose that Assumptions 1–4 are satisfied. Then, the equilibrium point of the closed-loop system of and is asymptotically stable. 4. Attitude Control Design
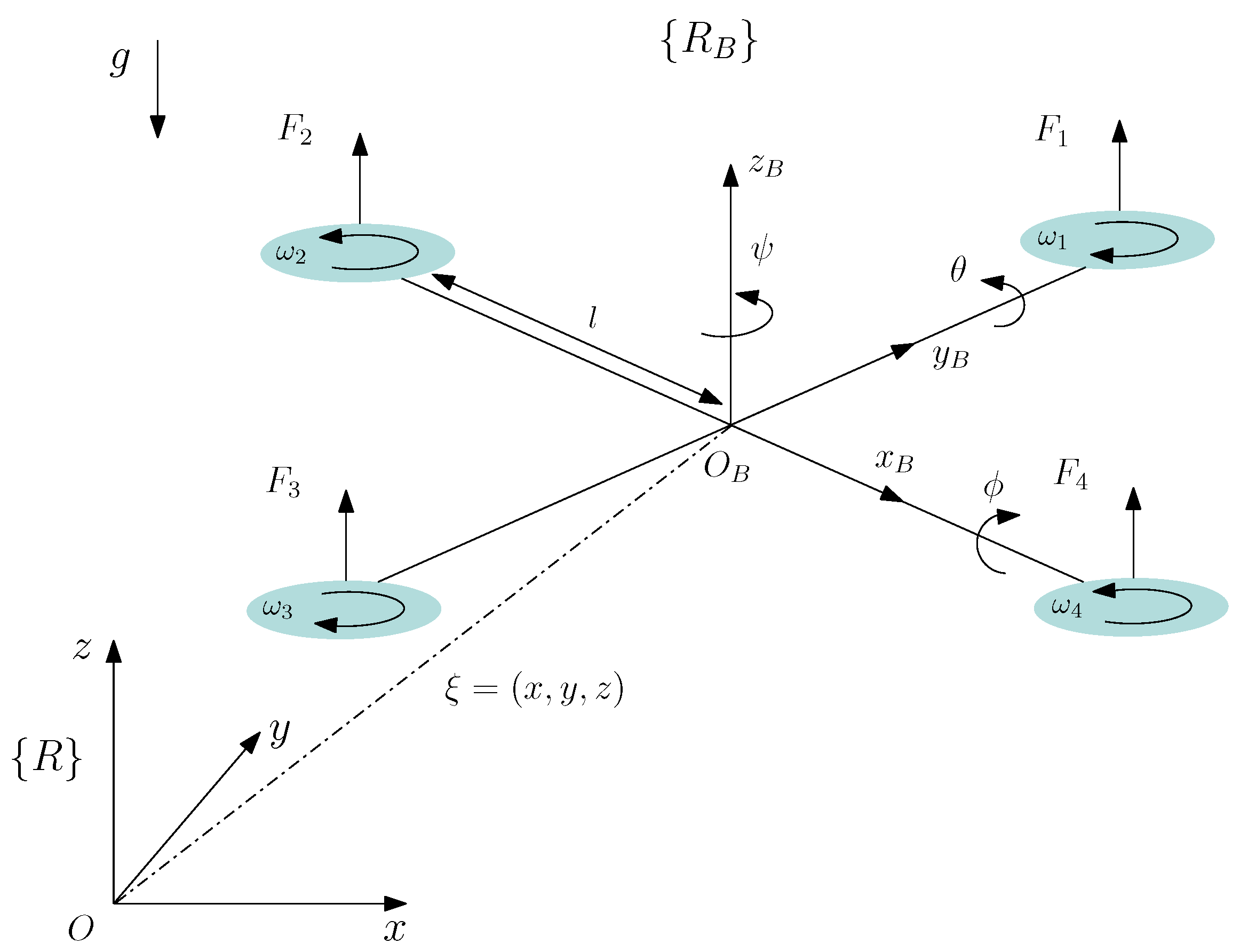
As it can be seen from the previous section, the state-space model of the quadrotor can be divided into two subsystems, one of which, the rotational subsystem, describes the dynamics of the attitude (i.e., the angles) and the other describes the translation of the quadrotor. In this paper, we are interested in the problem of stabilizing the attitude of the quadrotor around a desired reference signal by using a nonlinear negative imaginary approach. For this purpose we confine ourselves to the rotational subsystem whose state is a restriction to the last 6 components of
representing the roll, pitch and yaw angles and their time derivatives. The rotational subsystem is then described by the differential equation
In recent studies, the use of a multi-loop control architecture has been proposed for a variety of quadrotor control problems; see for instance [
25,
26]. In this section, we propose an inner-outer loop architecture based on the nonlinear negative theory [
12] to robustly stabilize the attitude, i.e., the Euler angles, around desired reference signal
, where the angular velocity measurements are not needed.
4.1. Inner-Control Loop
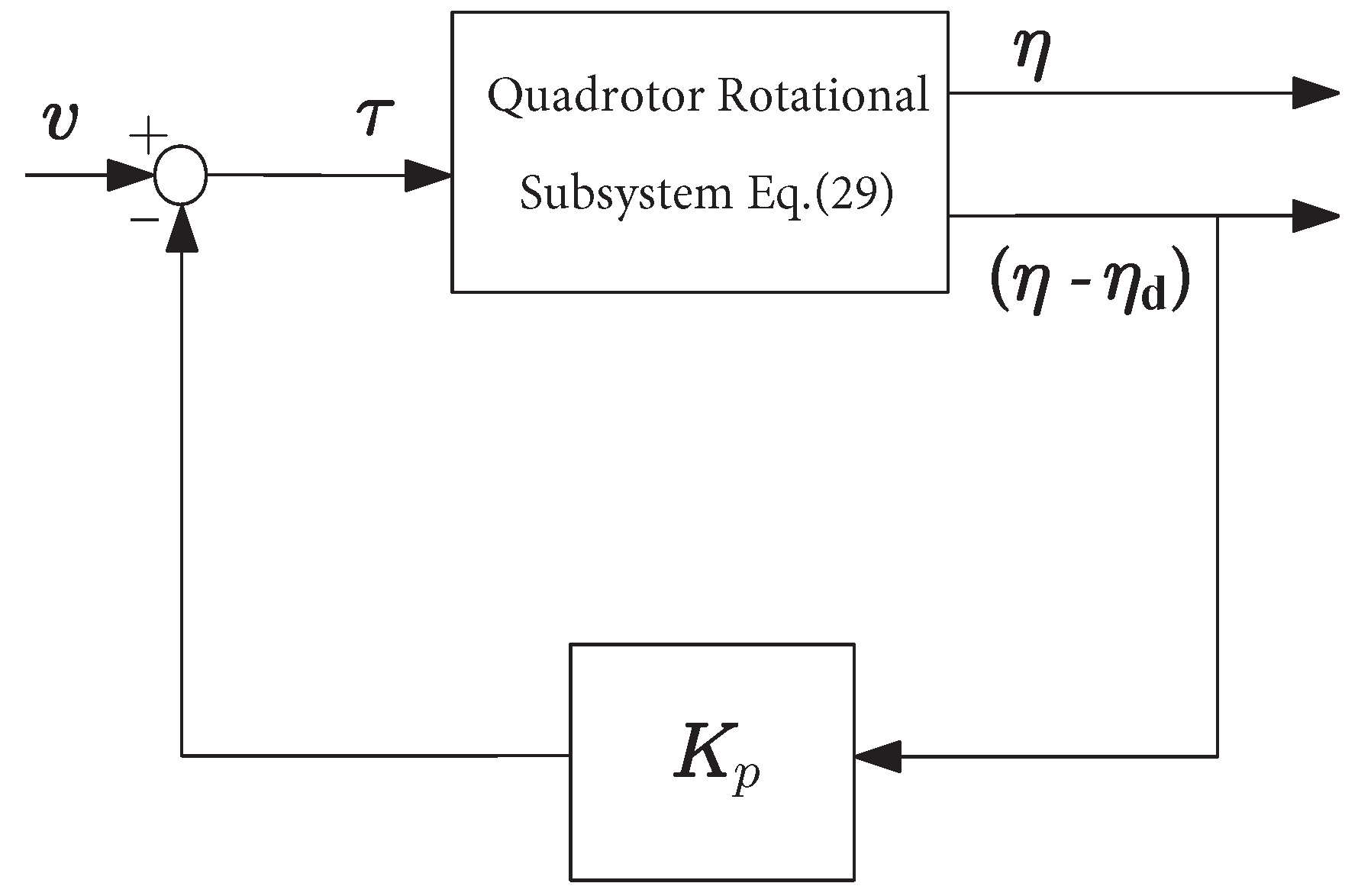
The inner-control loop is mainly designed due to the free motion behavior of the quadrotor. We define the following feedback control law:
where
denotes the new input torque of the quadrotor, and
is a positive diagonal matrix and the diagonal elements are used as tuning parameters. The architecture of the inner-loop can be interpreted as a proportional-only controller as seen in
Figure 4 below.
The designed torque
is then defined as follows,
Using (32), and setting the desired reference signal
, the rotational subsystem can be put in the form
:
or equivalently,
The above rotational dynamical system (33) can be seen as a nonlinear negative imaginary system from the input to the output according to the following lemma.
Lemma 5. Consider the quadrotor rotational subsystem (33) with as input and as output. Then, the system (33) is a nonlinear negative imaginary system with respect to the following positive-definite storage function, Proof. It can be easily shown that
V is a valid storage function; since the rotational inertia matrix
is positive definite and
. Taking the time derivative of
V we obtain
which shows that the system (33) is nonlinear negative imaginary from the input
to the output
. □
4.2. Outer-Control Loop
We aim here to design the outer control loop of the rotational subsystem in order to get a positive-feedback closed-loop system which guarantees the asymptotic stability of the quadrotor attitude in view of Theorem 2. For simplicity, we will use the following linear MIMO integral resonant controller as the outer control loop controller,
Here,
and
are positive-definite matrices given by
, and
, where
and
are tuning parameters. The transfer function matrix
is strictly negative imaginary [
16]. The dc-gain (the gain of the system at steady-state) of the controller is
.
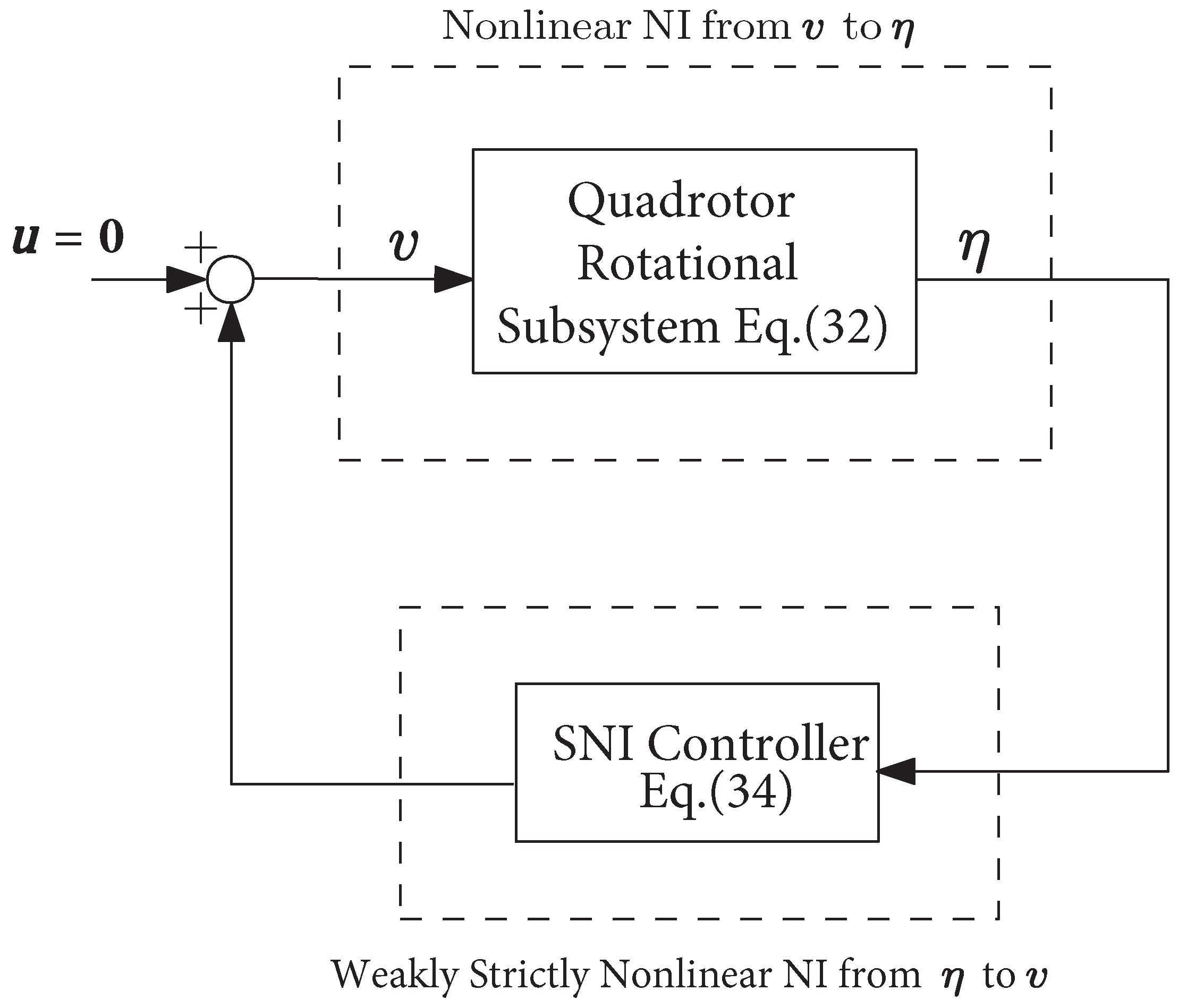
In order to apply Theorem 2, we need to validate Assumptions 1–4 on the open-loop interconnection (as shown in
Figure 5) of the quadrotor rotational subsystem (33) and the SNI controller (35) in the steady-state case. We have
, this implies
and
which shows for every constant value of
there is a corresponding unique value of
and hence Assumption 1 holds. Furthermore, Assumption 2 trivially holds since the controller (35) is a linear system.
We can easily see that Assumption 3 is valid since we have
, where
, it yields
Lastly, using (36) we see that
where
Thus, to ensure that Assumption 4 is valid such that
, we choose the tuning parameter
such that:
Based upon the above arguments, we have found a lower bound on the DC-gain of the outer controller that is necessary to achieve asymptotic stability of the attitude vector around the reference signal by virtue of Theorem 2. We summarize the above result in the following theorem.
Theorem 3. Consider the closed-loop system, as in Figure 6, of the quadrotor rotational subsystem (33) and the strictly negative imaginary controller (35). Assume that the system (33) is zero-state observable, and the condition (37) is satisfied. Then the closed-loop system is asymptotically stable. Proof. The proof follows from the proof of Theorem 2 along with remark 1. □
Figure 6.
Block diagram of the proposed attitude control system comprised of a positive feedback interconnection of the rotational subsystem (33) and SNI controller (35).
Figure 6.
Block diagram of the proposed attitude control system comprised of a positive feedback interconnection of the rotational subsystem (33) and SNI controller (35).
Remark 4. The above stability result leads to a robust control system since the stability is guaranteed irrespective of the quadrotor and controller parameters so long as the condition (37) is satisfied.
5. Simulation Results
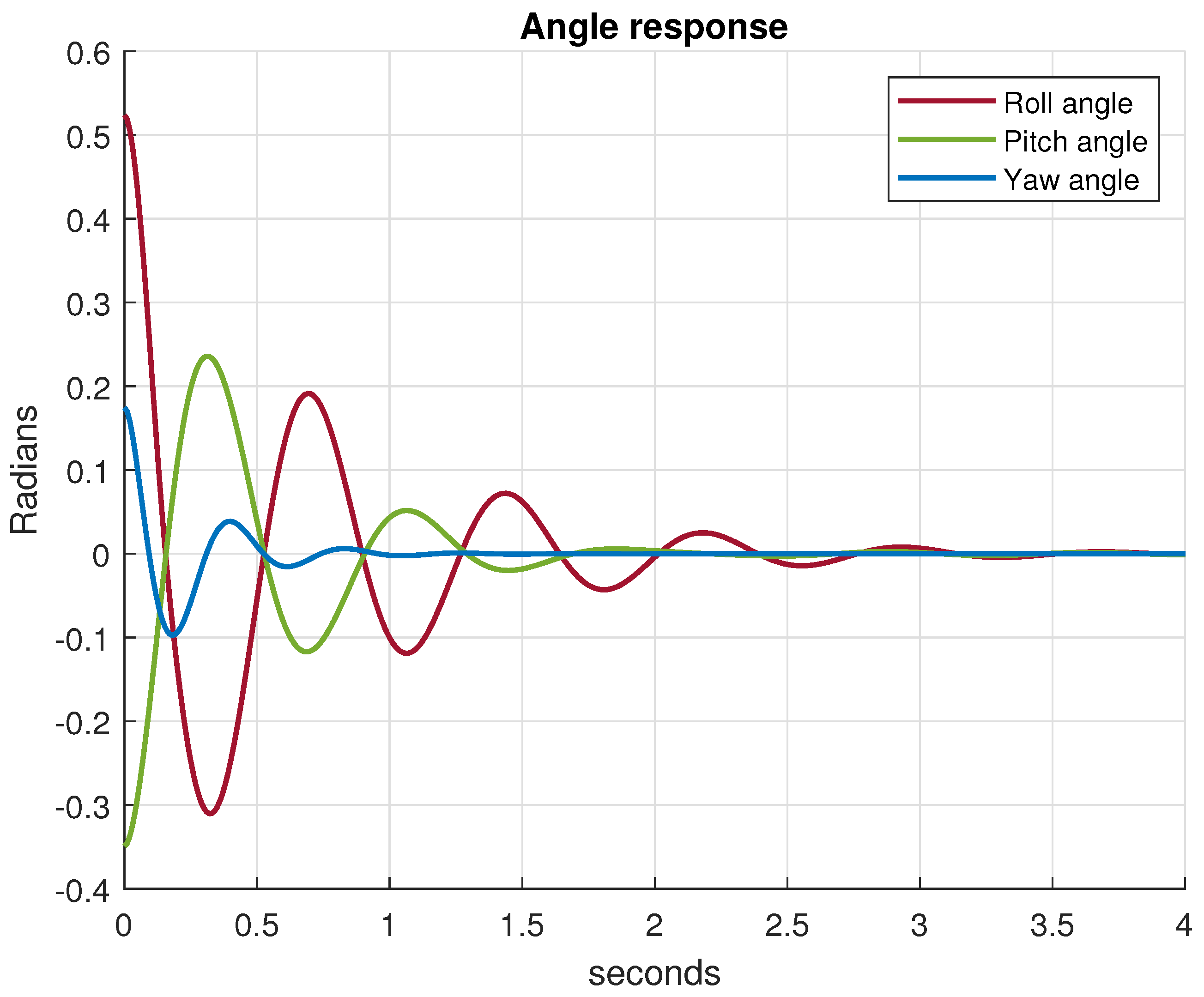
In order to verify the proposed attitude control method in this paper, we present a simulation results of the underlying quadrotor system tracking a desired reference attitude
. The quadrotor parameters used in the simulation are given as follows:
. Using these parameters, the quadrotor rotational subsystem (33) is then implemented in MATLAB/Simulink for a simulation. The parameters of the inner-loop controller are chosen as
. Based on the result of Theorem 3, the tuning gains of the outer controller are set as
, and
. We assume that the initial state of the attitude vector is
, where the control goal is to stabilize the quadrotor at a hovering position, i.e.,
. The obtained control result is shown in
Figure 7 as a time plot of all Euler angles of the quadrotor system. The simulations show that the proposed control method asymptotically stabilize the attitude of the quadrotor to the desired reference signal.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}