
Analysis of Embedded Optical Interferometry in Transparent Elastic Grating for Optical Detection of Ultrasonic Waves


Abstract
:1. Introduction
2. Materials and Methods
2.1. Material Compression under Ultrasonic Illumination
2.2. Optical Reflectance Calculation
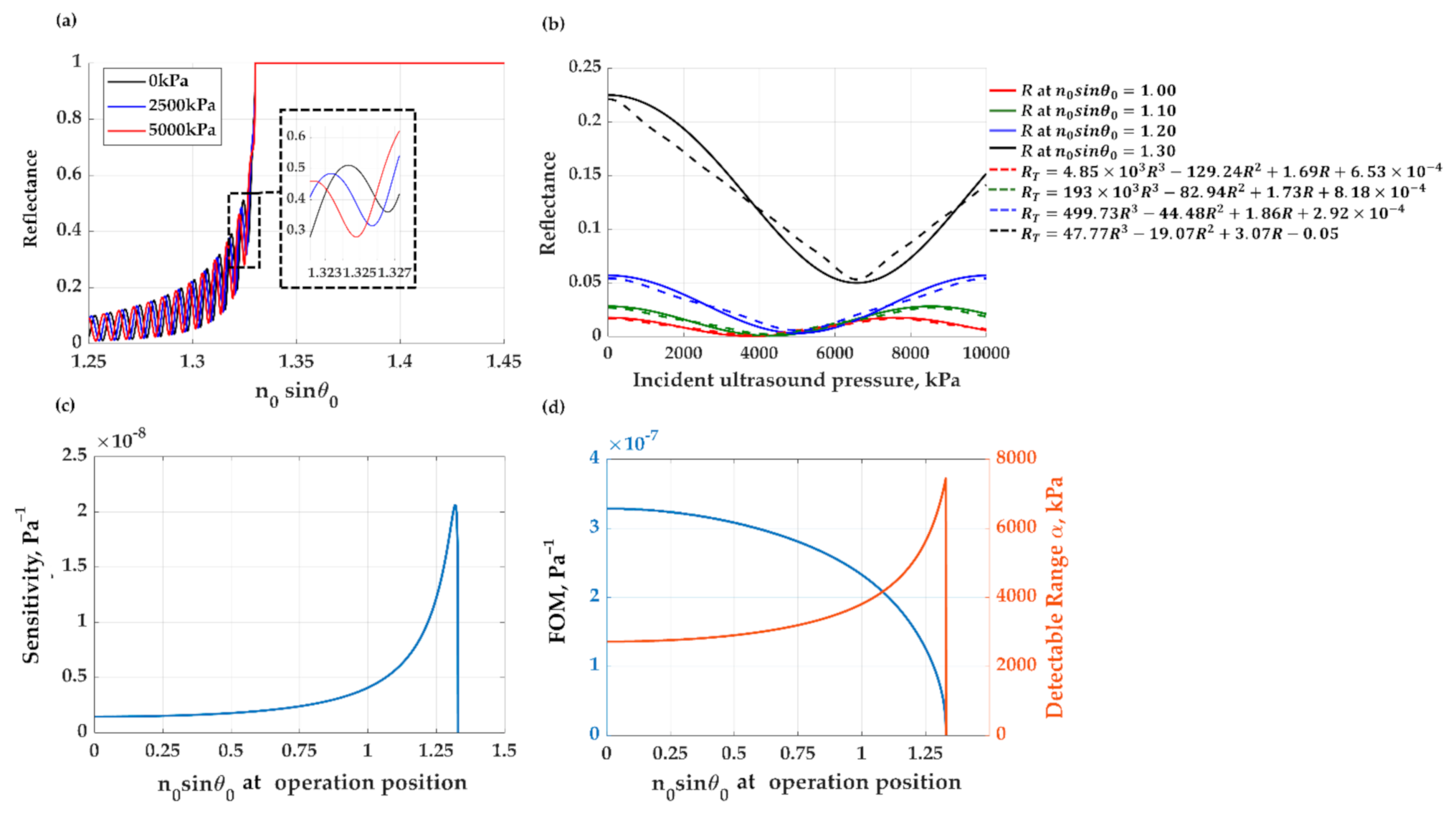
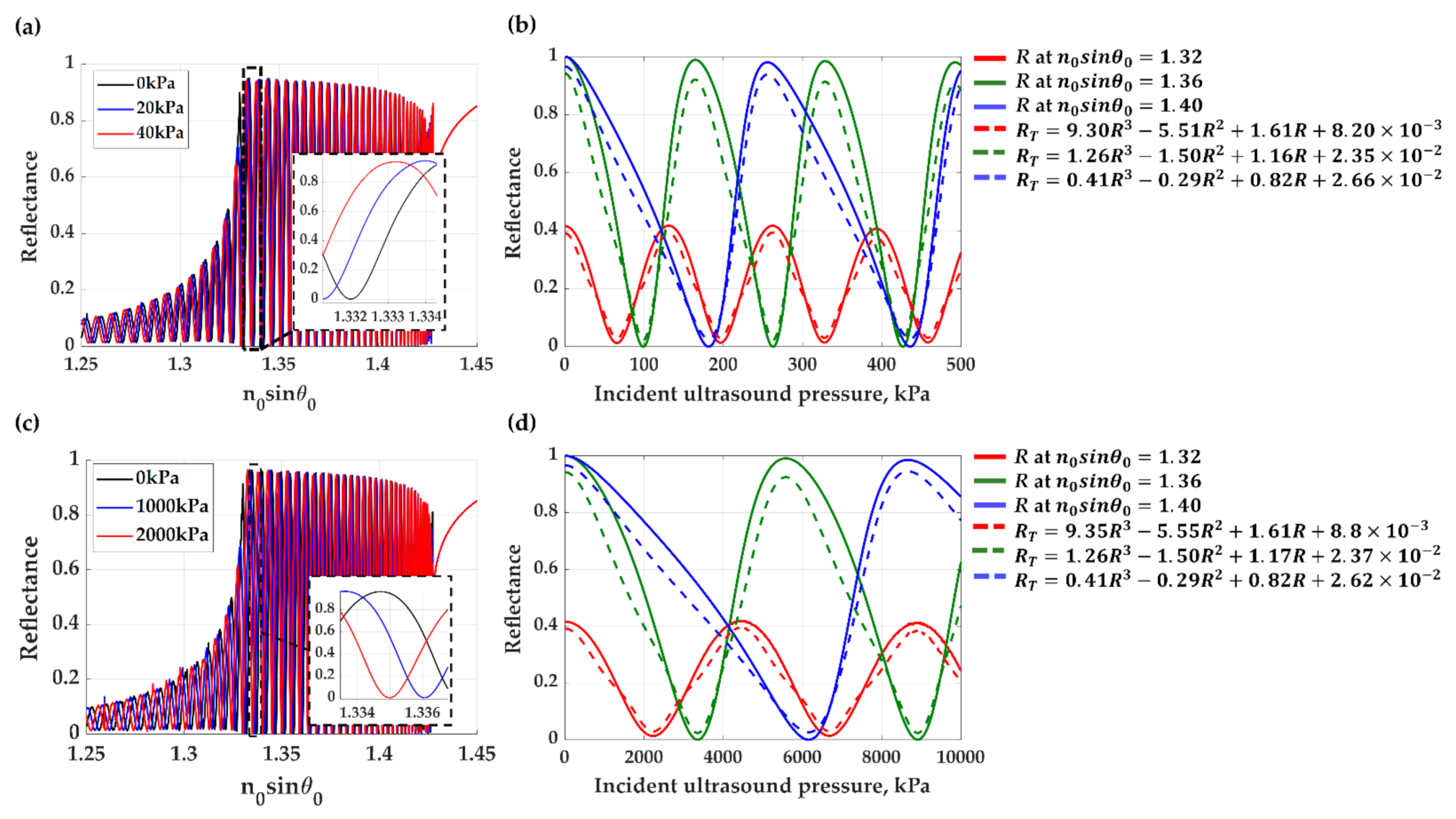
2.3. Non-Linear Response of the FP Modes and Mathematical Transform for Linearization
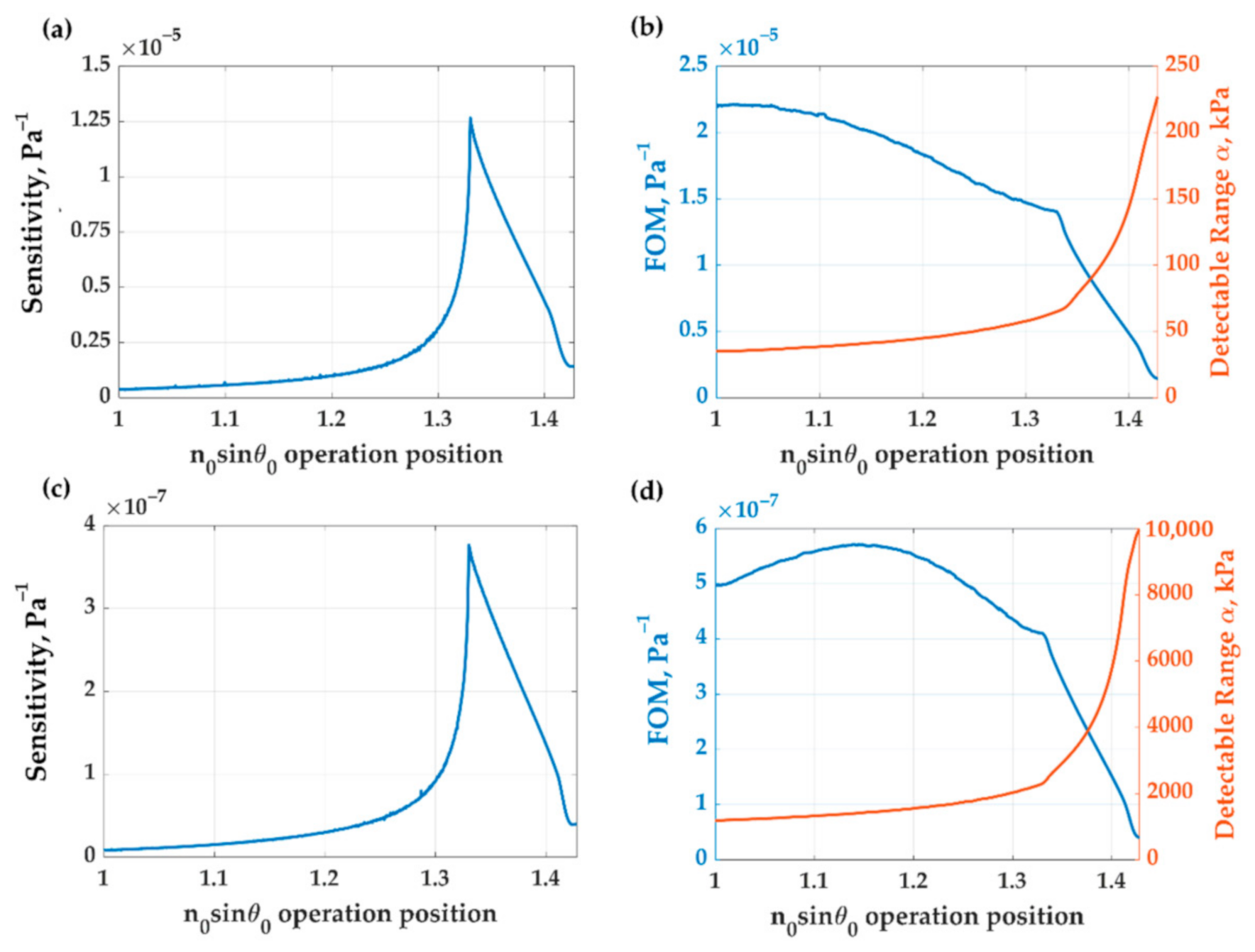
2.4. Comparative Sensor’s Performance Parameters
3. Results and Discussion
3.1. Ultrasonic Detection Using the Uniform PDMS Thin Film
3.1.1. Mechanical Responses of the Uniform PDMS Layer to the Incident Ultrasonic Wave
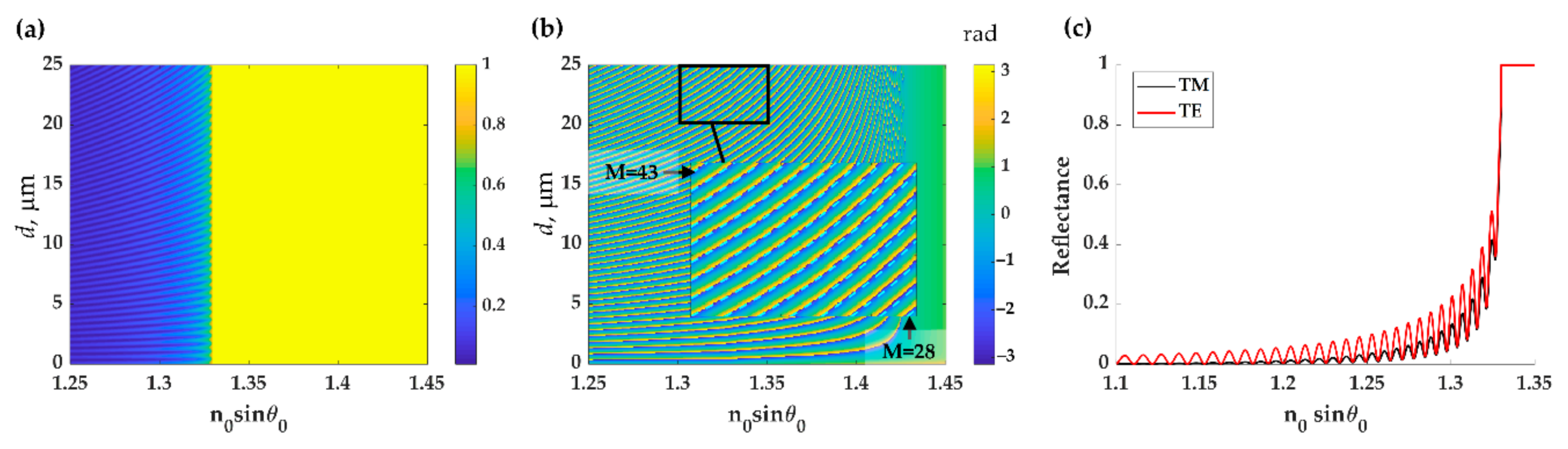
3.1.2. Embedded Fabry–Perot Interferometer Formed by the Two Interfaces of PDMS Layer
3.1.3. Sensorgram of the Uniform PDMS for Ultrasonic Detection
3.2. Ultrasound Detection Using PDMS Grating
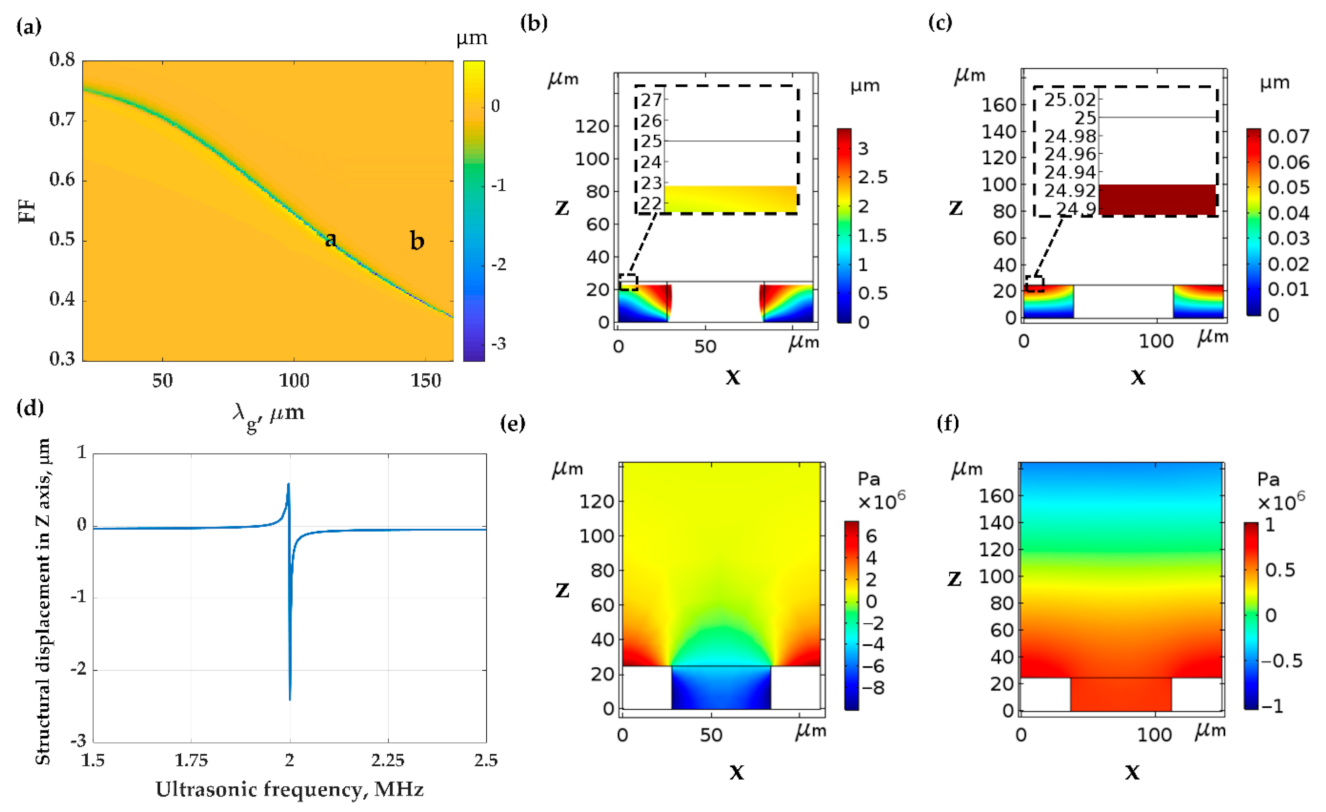
3.2.1. Mechanical Responses of the PDMS Grating to the Incident Ultrasonic Wave
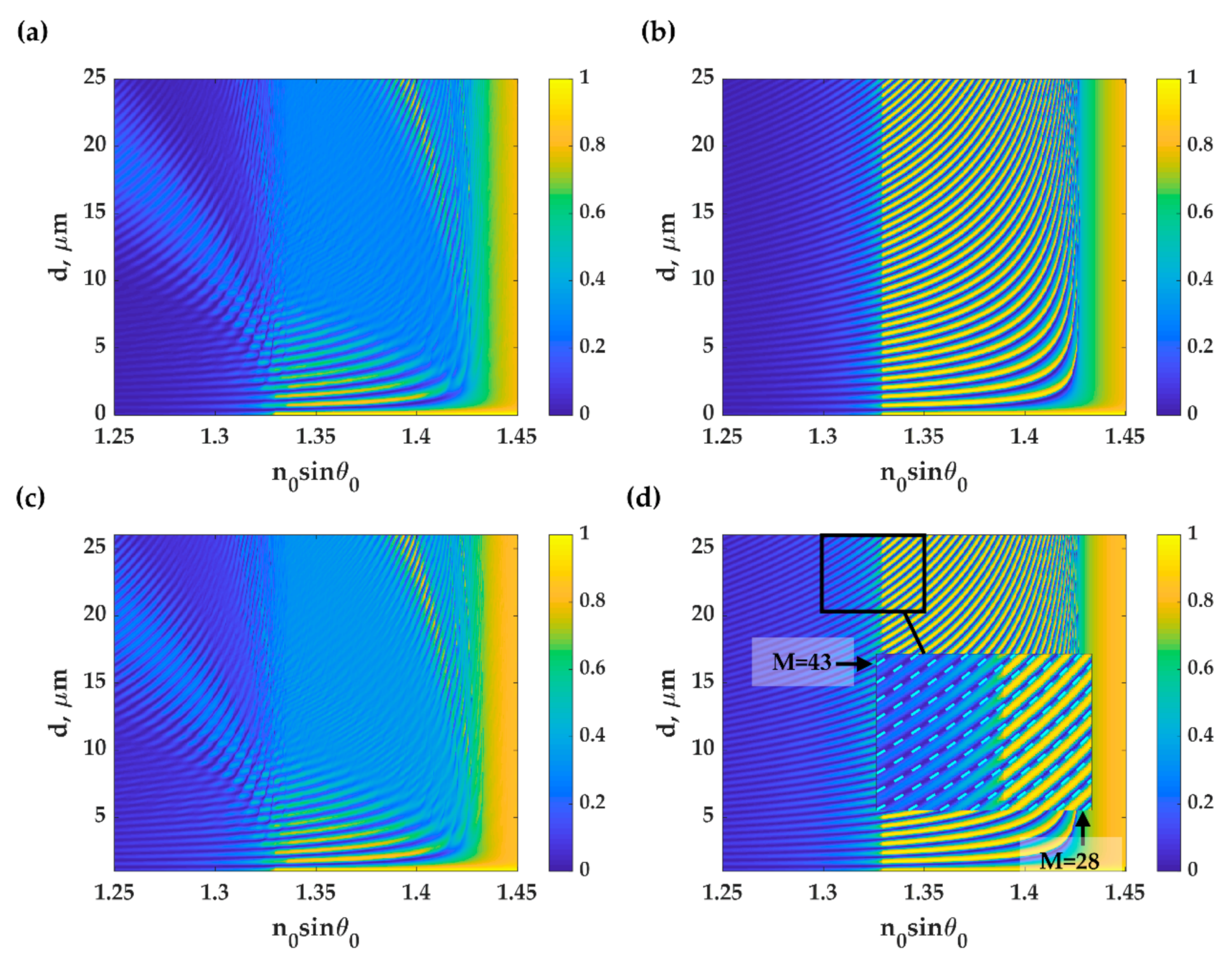
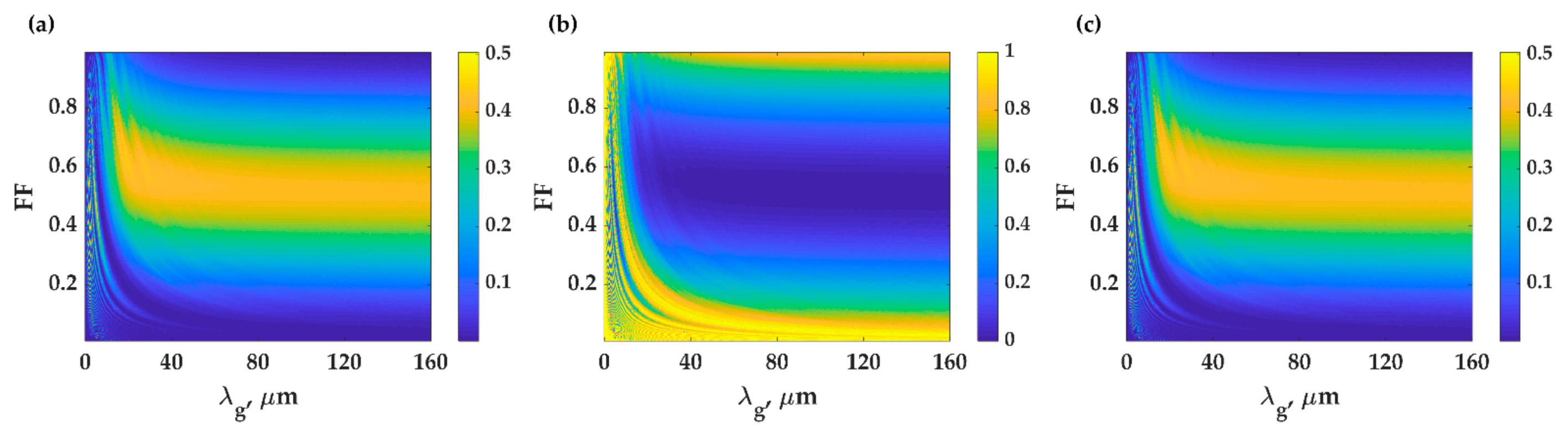
3.2.2. Fabry–Perot Modes Formed by Reflections from Each of the Two Interfaces and Diffraction Provided by the PDMS Grating
3.2.3. Sensorgram of the PDMS Grating for Ultrasonic Detection
3.3. Performance Comparison of Different Thin Film Structures
4. Discussion on Practical Considerations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Carovac, A.; Smajlovic, F.; Junuzovic, D. Application of Ultrasound in Medicine. Acta Inform. Medica 2011, 19, 168–171. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, Q.; Guo, H.; Jin, T.; Qi, W.; Xie, H.; Xi, L. Ultracompact high-resolution photoacoustic microscopy. Opt. Lett. 2018, 43, 1615–1618. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhu, X.; Huang, Z.; Wang, G.; Li, W.; Zou, D.; Li, C. Ultrasonic detection based on polarization-dependent optical reflection. Opt. Lett. 2017, 42, 439. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Dong, B.; Zhang, Z.; Zhang, H.F.; Sun, C. A transparent broadband ultrasonic detector based on an optical microring resonator for photoacoustic micros-copy. Sci. Rep. 2014, 4, 4496. [Google Scholar]
- Li, H.; Dong, B.; Zhang, Z.; Zhang, H.F.; Sun, C. Ultrasound detection using polymer microring optical resonator. Appl. Phys. Lett. 2004, 85, 5418–5420. [Google Scholar]
- Chao, C.-Y.; Ashkenazi, S.; Huang, S.-W.; O’Donnell, M.; Guo, L.J. High-frequency ultrasound sensors using polymer microring resonators. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2007, 54, 957–965. [Google Scholar] [CrossRef]
- Maxwell, A.; Huang, S.-W.; Ling, T.; Kim, J.-S.; Ashkenazi, S.; Guo, L.J. Polymer Microring Resonators for High-Frequency Ultrasound Detection and Imaging. IEEE J. Sel. Top. Quantum Electron. 2008, 14, 191–197. [Google Scholar] [CrossRef]
- Ling, T.; Chen, S.-L.; Guo, L.J. Fabrication and characterization of High Q polymer micro-ring resonator and its application as a sensitive ultrasonic detector. Opt. Express 2011, 19, 861–869. [Google Scholar] [CrossRef]
- Beard, P.; Mills, T. Extrinsic optical-fiber ultrasound sensor using a thin polymer film as a low-finesse Fabry-Perot interferometer. Appl. Opt. 1996, 35, 663–675. [Google Scholar] [CrossRef]
- Culshaw, B.; Thursby, G.; Betz, D.; Sorazu, B. The Detection of Ultrasound Using Fiber-Optic Sensors. IEEE Sensors J. 2008, 8, 1360–1367. [Google Scholar] [CrossRef]
- Wen, H.; Wiesler, D.; Tveten, A.; Danver, B.; Dandridge, A. High-Sensitivity Fiber-Optic Ultrasound Sensors for Medical Imaging Applications. Ultrason. Imaging 1998, 20, 103–112. [Google Scholar] [CrossRef] [Green Version]
- Liu, T.; Han, M. Analysis of π-Phase-Shifted Fiber Bragg Gratings for Ultrasonic Detection. IEEE Sensors J. 2012, 12, 2368–2373. [Google Scholar] [CrossRef]
- Beard, P.; Perennes, F.; Mills, T. Transduction mechanisms of the Fabry-Perot polymer film sensing concept for wideband ultrasound detection. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1999, 46, 1575–1582. [Google Scholar] [CrossRef]
- Buchmann, J.; Zhang, E.; Scharfenorth, C.; Spannekrebs, B.; Villringer, C.; Laufer, J. Evaluation of Fabry-Perot polymer film sensors made using hard dielectric mirror deposition. Photons Plus Ultrasound Imaging Sens. 2016, 9708, 970856. [Google Scholar] [CrossRef]
- Wang, J.; Wang, M.; Xu, J.; Peng, L.; Yang, M.; Xia, M.; Jiang, D. Underwater blast wave pressure sensor based on polymer film fiber Fabry-Perot cavity. Appl. Opt. 2014, 53, 6494–6502. [Google Scholar] [CrossRef]
- Zhang, E.; Laufer, J.; Beard, P. Backward-mode multiwavelength photoacoustic scanner using a planar Fabry-Perot polymer film ultrasound sensor for high-resolution three-dimensional imaging of biological tissues. Appl. Opt. 2008, 47, 561–577. [Google Scholar] [CrossRef]
- Han, M.; Guo, F.; Lu, Y. Optical fiber refractometer based on cladding-mode Bragg grating. Appl. Opt. 2010, 35, 399–401. [Google Scholar] [CrossRef]
- Learkthanakhachon, S.; Pechprasarn, S.; Somekh, M.G. Optical detection of ultrasound by lateral shearing interference of a transparent PDMS thin film. Opt. Lett. 2018, 43, 5797–5800. [Google Scholar] [CrossRef]
- COMSOL INC. The Acoustic-Solid Ineraction, Frequency Domain Interface; COMSOL INC.: Stockholm, Sweden, 2018; pp. 270–272. [Google Scholar]
- Johansson, L.; Enlund, J.; Johansson, S.; Katardjiev, I.; Yantchev, V. Surface acoustic wave induced particle manipulation in a PDMS channel-principle concepts for contin-uous flow applications. Biomed. Microdevices 2011, 14, 279–289. [Google Scholar] [CrossRef]
- Pottier, B.; Ducouret, G.; Frétigny, C.; Lequeux, F.; Talini, L. High bandwidth linear viscoelastic properties of complex fluids from the measurement of their free surface fluctuations. Soft Matter 2011, 7, 7843–7850. [Google Scholar] [CrossRef]
- Onishi, M.; Crabtree, K.; Chipman, R.A. Formulation of rigorous coupled-wave theory for gratings in bianisotropic media. J. Opt. Soc. Am. A 2011, 28, 1747–1758. [Google Scholar] [CrossRef]
- Mohammed, Z.H. The Fresnel Coefficient of Thin Film Multilayer Using Transfer Matrix Method TMM. IOP Conf. Ser. Mater. Sci. Eng. 2019, 518, 32026. [Google Scholar] [CrossRef]
- Schneider, F.; Draheim, J.; Kamberger, R.; Wallrabe, U. Process and material properties of polydimethylsiloxane (PDMS) for Optical MEMS. Sens. Actuators A Phys. 2009, 151, 95–99. [Google Scholar] [CrossRef]
- Valdes-Gonzalez, T.; Inagawa, J.; Ido, T. Characterization of the interactions of β-amyloid peptides with glycolipid receptors by surface plasmon resonance. Spectroscopy 2003, 17, 241–254. [Google Scholar] [CrossRef] [Green Version]
- Minkina, W. Non-linear models of temperature sensor dynamics. Sens. Actuators A Phys. 1992, 30, 209–214. [Google Scholar] [CrossRef]
- Tao, R.; Deng, B.; Wang, Y. Research progress of the fractional Fourier transform in signal processing. Sci. China Ser. F Inf. Sci. 2006, 49, 1–25. [Google Scholar] [CrossRef]
- Cotton, N.J.; Wilamowski, B.M. Compensation of Sensors Nonlinearity with Neural Networks. In Proceedings of the 2010 24th IEEE International Conference on Advanced Information Networking and Applications, Perth, Australia, 20–23 April 2010; pp. 1210–1217. [Google Scholar]
- Chen, P.; Shu, X.; Cao, H.; Sugden, K. High-sensitivity and large-dynamic-range refractive index sensors employing weak composite Fabry–Perot cavities. Opt. Lett. 2017, 42, 3145–3148. [Google Scholar] [CrossRef]
- Morón, C.; Cabrera, C.; Morón, A.; García, A.; González, M. Magnetic Sensors Based on Amorphous Ferromagnetic Materials: A Review. Sensors 2015, 15, 28340–28366. [Google Scholar] [CrossRef] [Green Version]
- Couture, O.; Fink, M.; Tanter, M. Ultrasound contrast plane wave imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control. 2012, 59, 2676–2683. [Google Scholar] [CrossRef] [PubMed]
- Guillermic, R.-M.; Lanoy, M.; Strybulevych, A.; Page, J. A PDMS-based broadband acoustic impedance matched material for underwater applications. Ultrasonics 2019, 94, 152–157. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Alkins, R.; Hynynen, K. 10.08—Ultrasound Therapy, in Comprehensive Biomedical Physics; Brahme, A., Ed.; Elsevier: Oxford, UK, 2014; pp. 153–168. [Google Scholar]
- Talukdar, A.; Qazi, M.; Koley, G. High frequency dynamic bending response of piezoresistive GaN microcantilevers. Appl. Phys. Lett. 2012, 101, 252102. [Google Scholar] [CrossRef]
- Pechprasarn, S.; Zhang, B.; Albutt, D.; Zhang, J.; Somekh, M. Ultrastable embedded surface plasmon confocal interferometry. Light. Sci. Appl. 2014, 3, e187. [Google Scholar] [CrossRef]
- Ouseph, P.J.; Driver, K.; Conklin, J. Polarization of light by reflection and the Brewster angle. Am. J. Phys. 2001, 69, 1166–1168. [Google Scholar] [CrossRef]
- Heideman, R.G.; Kooyman, R.P.H.; Greve, J. Performance of a highly sensitive optical waveguide Mach-Zehnder inter-ferometer immunosensor. Sens. Actuators B Chem. 1993, 10, 209–217. [Google Scholar] [CrossRef] [Green Version]
- De Groot, P.J. A review of selected topics in interferometric optical metrology. Rep. Prog. Phys. 2019, 82, 56101. [Google Scholar] [CrossRef]
- Bronowicki, A.J.; Macdonald, R.; Gürsel, Y.; Goullioud, R.; Neville, T.; Platus, D.L. Dual stage passive vibration isolation for optical interferometer missions. Astron. Telesc. Instrum. 2003, 4852, 753–764. [Google Scholar] [CrossRef]
- Pechprasarn, S.; Learkthanakhachon, S.; Zheng, G.; Shen, H.; Lei, D.Y.; Somekh, M.G. Grating-coupled Otto configuration for hybridized surface phonon polariton excitation for local refractive index sensitivity enhancement. Opt. Express 2016, 24, 19517–19530. [Google Scholar] [CrossRef]
- Sasivimolkul, S.; Pechprasarn, S.; Somekh, M.G. Analysis of open grating based Fabry-Pérot resonance structures with potential applications for ultrasensitive refractive index sensing. IEEE Sensors J. 2021. [Google Scholar] [CrossRef]
- Shen, M.; Learkthanakhachon, S.; Pechprasarn, S.; Zhang, Y.; Somekh, M.G. Adjustable microscopic measurement of nanogap waveguide and plasmonic structures. Appl. Opt. 2018, 57, 3453–3462. [Google Scholar] [CrossRef]
- Ramesh, A.; Ramesh, P. Trade-off between sensitivity and dynamic range in designing MEMS capacitive pressure sensor. In Proceedings of the TENCON 2015 IEEE Region 10 Conference, Macao, China, 1–4 November 2015. [Google Scholar]
- Hashimoto, K.-Y.; Omori, T.; Yamaguchi, M. Analysis of saw excitation and propagation under periodic metallic grating structures. Int. J. High Speed Electron. Syst. 2000, 10, 685–734. [Google Scholar] [CrossRef]
- El Fissi, L.; Jaouad, A.; Vandormael, D.; Francis, L. Fabrication of new Interdigital Transducers for Surface Acoustic Wave Device. Phys. Procedia 2015, 70, 936–940. [Google Scholar] [CrossRef] [Green Version]
- Jian, X.; Dixon, S.; Guo, N.; Edwards, R. Rayleigh wave interaction with surface-breaking cracks. J. Appl. Phys. 2007, 101, 64906. [Google Scholar] [CrossRef]
- Malitson, I.H. Interspecimen Comparison of the Refractive Index of Fused Silica. J. Opt. Soc. Am. 1965, 55, 1205–1208. [Google Scholar] [CrossRef]
- Devore, J.R. Refractive Indices of Rutile and Sphalerite. J. Opt. Soc. Am. 1951, 41, 416–419. [Google Scholar] [CrossRef]
- Sangworasil, M.; Pechprasarn, S.; Learkthanakhachon, S.; Ittipornnuson, K.; Suvarnaphaet, P.; Albutt, N. Investigation on feasibility of using surface plasmons resonance (SPR) sensor for ultrasonic detection: A novel optical detection of ultrasonic waves. In Proceedings of the 2016 9th Biomedical Engineering International Conference (BMEiCON), Laung Prabang, Laos, 7–9 December 2016; pp. 1–3. [Google Scholar]
- Liu, M.; Sun, J.; Sun, Y.; Bock, C.; Chen, Q. Thickness-dependent mechanical properties of polydimethylsiloxane membranes. J. Micromech. Microeng. 2009, 19, 35028. [Google Scholar] [CrossRef]
- Chow, T.W.; Pechprasarn, S.; Meng, J.; Somekh, M.G. Single shot embedded surface plasmon microscopy with vortex illumination. Opt. Express 2016, 24, 10797–10805. [Google Scholar] [CrossRef]
- Somekh, M.G.; Pechprasarn, S. Surface plasmon, surface wave, and enhanced evanescent wave microscopy. In Handbook of Photonics for Biomedical Engineering; Springer: Berlin/Heidelberg, Germany, 2017; pp. 503–543. [Google Scholar]
- Suvarnaphaet, P.; Pechprasarn, S. Enhancement of Long-Range Surface Plasmon Excitation, Dynamic Range and Figure of Merit Using a Dielectric Resonant Cavity. Sensors 2018, 18, 2757. [Google Scholar] [CrossRef] [Green Version]
- Suvarnaphaet, P.; Pechprasarn, S. Quantitative Cross-Platform Performance Comparison between Different Detection Mechanisms in Surface Plasmon Sensors for Voltage Sensing. Sensors 2018, 18, 3136. [Google Scholar] [CrossRef] [Green Version]
- Zhang, B.; Cui, J.; Duan, J.; Cui, M. A new fabrication method for nano-gratings based on the high flexibility of PDMS. Opt. Laser Technol. 2017, 92, 206–210. [Google Scholar] [CrossRef]
- Bhagat, A.A.S.; Jothimuthu, P.; Papautsky, I. Photodefinable polydimethylsiloxane (PDMS) for rapid lab-on-a-chip prototyping. Lab Chip 2007, 7, 1192–1197. [Google Scholar] [CrossRef]
- Park, C.-S.; Joo, K.-I.; Kang, S.-W.; Kim, H.-R. A PDMS-Coated Optical Fiber Bragg Grating Sensor for Enhancing Temperature Sensitivity. J. Opt. Soc. Korea 2011, 15, 329–334. [Google Scholar] [CrossRef]
- Lowndes, R.H.; Hallett, M.B. A versatile light microscope heating stage for biological temperatures. J. Microsc. 1986, 142, 371–374. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensitivity (Pa−1) | FOM (Pa−1) | Detectable Range, α (kPa) | FOM × α | |
|---|---|---|---|---|
| SPR sensor [49] | 6.1 × 10−9 | 4.7 × 10−8 | 315,000 | 1.49 |
| FP mode in PDMS thin film (n0sinθ0 = 0) | 1.5 × 10−9 | 3.3 × 10−7 | 2720 | 0.90 |
| FP mode in PDMS thin film (n0sinθ0 = 1.32) | 2.1 × 10−8 | 5.0 × 10−8 | 7130 | 0.35 |
| FP interferometer with bimetallic layer [15] | 6.5 × 10−8 | 7.4 × 10−7 | 2160 | 0.16 |
| FP interferometer with Bragg reflector [14] | 1.9 × 10−6 | 3.4 × 10−6 | 280 | 0.97 |
| Grating structure with SAW at operating point (a) (n0sinθ0 = 1.00) | 3.7 × 10−7 | 2.2 × 10−5 | 35 | 0.77 |
| Grating structure with SAW at operating point (a) (n0sinθ0 = 1.33) | 1.3 × 10−5 | 1.4 × 10−5 | 67 | 0.93 |
| Grating structure without SAW at operating point (b) (n0sinθ0 = 1.14) | 2.0 × 10−8 | 5.7 × 10−7 | 1400 | 0.80 |
| Grating structure without SAW at operating point (b) (n0sinθ0 = 1.33) | 3.8 × 10−7 | 4.0 × 10−7 | 2388 | 0.95 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sukkasem, C.; Sasivimolkul, S.; Suvarnaphaet, P.; Pechprasarn, S. Analysis of Embedded Optical Interferometry in Transparent Elastic Grating for Optical Detection of Ultrasonic Waves. Sensors 2021, 21, 2787. https://doi.org/10.3390/s21082787
Sukkasem C, Sasivimolkul S, Suvarnaphaet P, Pechprasarn S. Analysis of Embedded Optical Interferometry in Transparent Elastic Grating for Optical Detection of Ultrasonic Waves. Sensors. 2021; 21(8):2787. https://doi.org/10.3390/s21082787
Chicago/Turabian StyleSukkasem, Chayanisa, Suvicha Sasivimolkul, Phitsini Suvarnaphaet, and Suejit Pechprasarn. 2021. "Analysis of Embedded Optical Interferometry in Transparent Elastic Grating for Optical Detection of Ultrasonic Waves" Sensors 21, no. 8: 2787. https://doi.org/10.3390/s21082787