
Nonlinear Ride Height Control of Active Air Suspension System with Output Constraints and Time-Varying Disturbances




Abstract
:1. Introduction
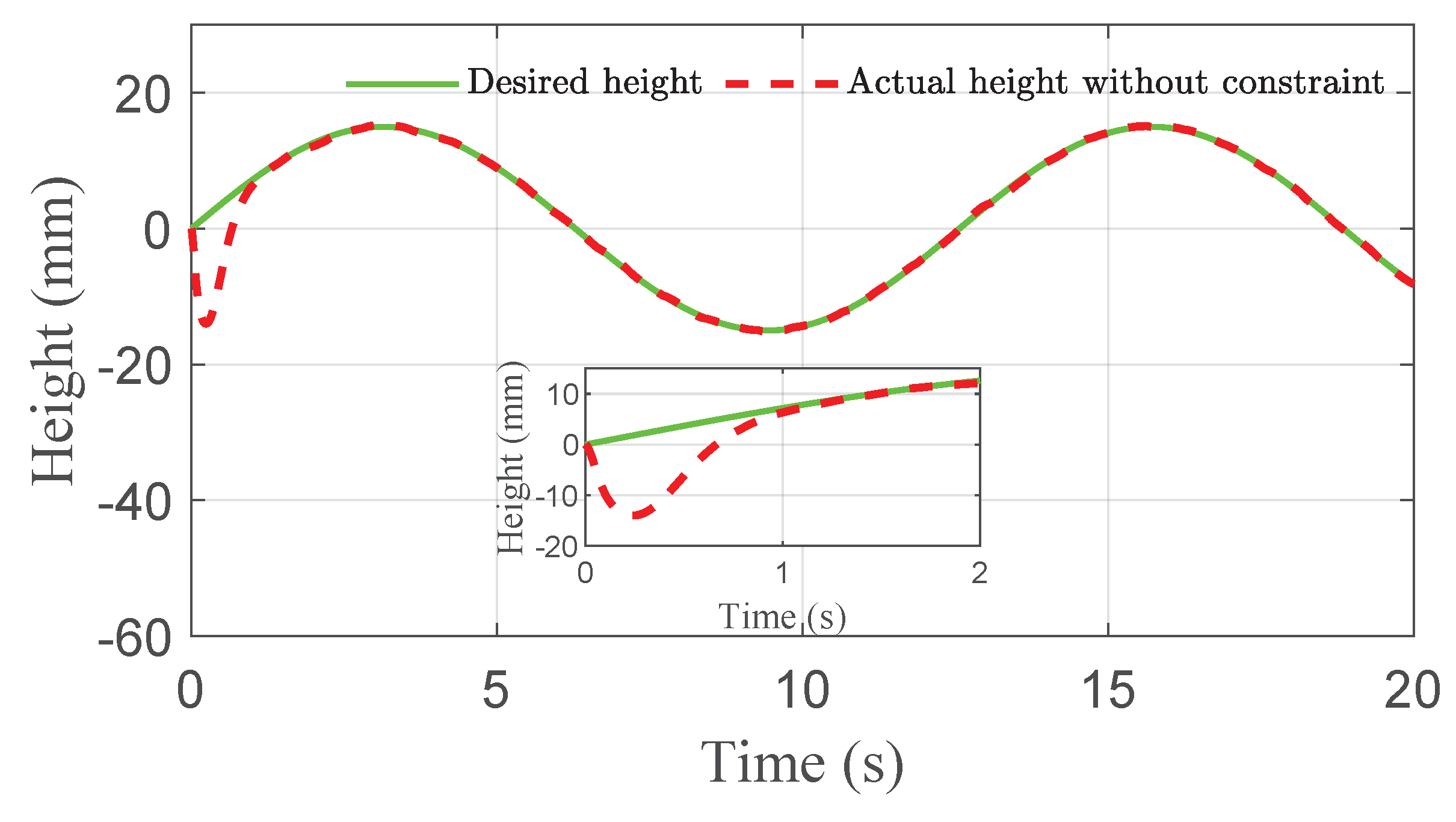
- A nonlinear height tracking controller for the nonlinear AAS system is proposed, guaranteeing that (i) the output height always stays in a predefined range and (ii) uniform ultimate boundedness is achieved.
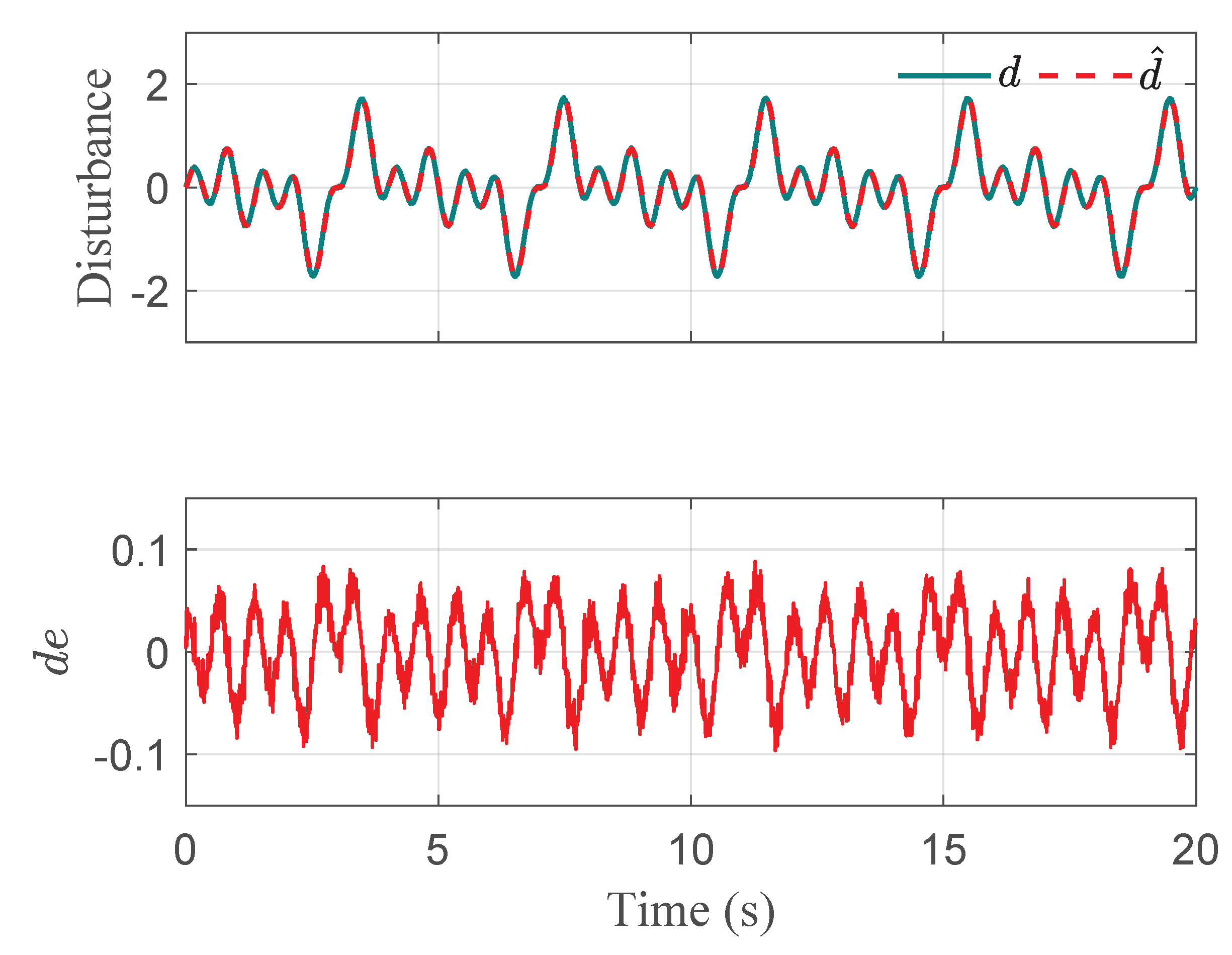
- A nonlinear disturbance observer is designed to compensate the time-varying disturbances caused by external random road excitation and perturbations in the AAS system.
2. Notation
3. Problem Formulation
3.1. ASS Modeling
3.2. Output Constraint and Barrier Lyapunov Function
3.3. Problem Statement
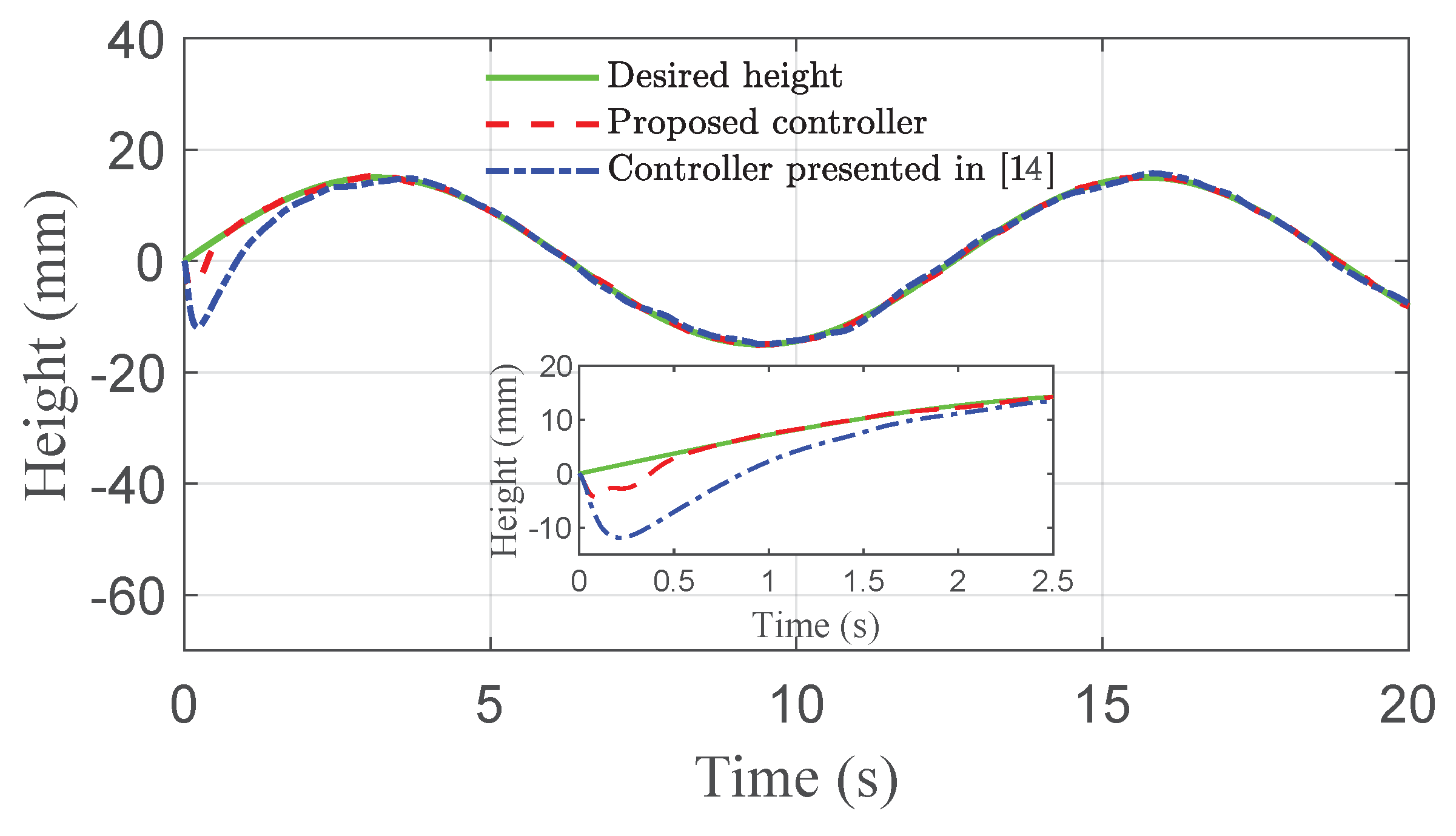
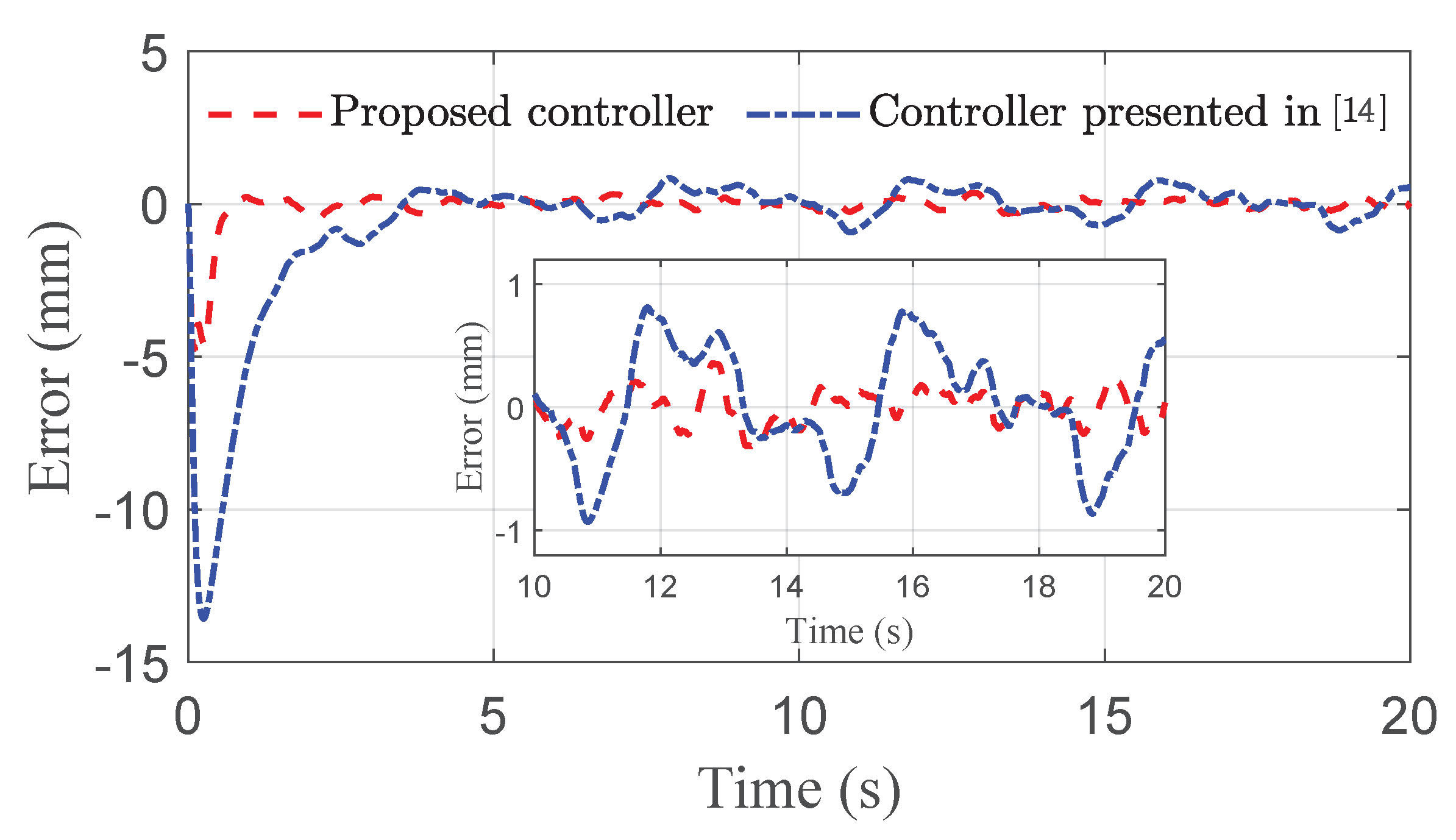
- The proposed ride height controller can guarantee the accurate trajectory tracking performance in the presence of time-varying disturbances.
- Due to the mechanical structure and travel limitation of the AAS, the dynamic height should be restrained within its allowable maximum value, which is expressed as .
4. Nonlinear Backstepping Controller Synthesis
4.1. Disturbance Observer Design
4.2. Constrained Controller Design
5. Simulation Verification
5.1. Simulation Conditions
5.2. Simulation Results and Analysis
5.3. Comparison of Simulation Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cao, D.; Song, X.; Ahmadian, M. Editors’ perspectives: Road vehicle suspension design, dynamics, and control. Veh. Syst. Dyn. 2011, 49, 3–28. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.; Wong, P.K.; Ma, X.B.; Xie, Z.C. Chassis integrated control for active suspension, active front steering and direct yaw moment systems using hierarchical strategy. Veh. Syst. Dyn. 2017, 55, 72–103. [Google Scholar] [CrossRef]
- Riofrio, A.; Sanz, S.; Boada, M.J.L.; Boada, B.L. A LQR-Based Controller with Estimation of Road Bank for Improving Vehicle Lateral and Rollover Stability via Active Suspension. Sensors 2017, 17, 2318. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Aly, A.A.; Salem, F.A. Vehicle suspension systems control: A review. Int. J. Control Autom. Syst. 2013, 2, 46–54. [Google Scholar]
- Huang, Y.B.; Na, J.; Wu, X.; Liu, X.Q.; Guo, Y. Adaptive control of nonlinear uncertain active suspension systems with prescribed performance. ISA Trans. 2015, 54, 145–155. [Google Scholar] [CrossRef] [PubMed]
- Zhao, J.; Wong, P.K.; Xie, Z.C.; Wei, C.Y.; Zhao, R.C. Design and evaluation of a rode comfort of based suspension system using an optimal stiffness-determination method. Trans. Can. Soc. Mech. Eng. 2016, 40, 773–785. [Google Scholar] [CrossRef]
- Sun, X.Q.; Cai, Y.F.; Chen, L.; Liu, Y.L.; Wang, S.H. Vehicle height and posture control of the electronic air suspension system using the hybrid system approach. Veh. Syst. Dyn. 2016, 54, 328–352. [Google Scholar] [CrossRef]
- Sun, X.Q.; Cai, Y.F.; Wang, S.H.; Liu, Y.L.; Chen, L. Design of a hybrid model predictive controller for the vehicle height adjustment system of an electronic air suspension. Proc. IMechE Part D J. Automob. Eng. 2016, 230, 1504–1520. [Google Scholar] [CrossRef]
- Gao, Z.; Chen, S.; Zhao, Y.; Nan, J. Height Adjustment of Vehicles Based on a Static Equilibrium Position State Observation Algorithm. Energies 2016, 11, 455. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.J. Development and analysis of an air spring model. Int. J. Automot. Technol. 2010, 11, 471–479. [Google Scholar] [CrossRef]
- Kim, H.; Lee, H. Height and leveling control of automotive air suspension system using sliding mode approach. IEEE Trans. Veh. Technol. 2011, 60, 2027–2041. [Google Scholar]
- Sun, W.; Pan, H.; Zhang, Y.F.; Gao, H.J. Multi-objective control for uncertain nonlinear active suspension systems. Mechatronics 2014, 24, 318–327. [Google Scholar] [CrossRef]
- Pang, H.; Zhang, X.; Xu, Z. Adaptive backstepping-based tracking control design for nonlinear active suspension system with parameter uncertainties and safety constraints. ISA Trans. 2019, 88, 23–36. [Google Scholar] [CrossRef]
- Zhao, R.C.; Xie, W.; Wong, P.K.; Cabecinhas, D.; Silvestre, C. Robust ride height control for active air suspension systems with multiple unmodeled dynamics and parametric uncertainties. IEEE Access 2019, 7, 59185–59199. [Google Scholar] [CrossRef]
- Sun, W.; Gao, H.; Kaynak, O. Finite frequency control for active vehicle suspension systems. IEEE Trans. Control Syst. Technol. 2011, 19, 416–422. [Google Scholar] [CrossRef]
- Kong, Y.S.; Zhao, D.X.; Yang, B.; Han, C.H.; Han, K. Robust non-fragile H∞/L2 − L∞ control of uncertain linear system with time-delay and application to vehicle active suspension. Int. J. Robust Nonlinear Control 2015, 25, 2122–2141. [Google Scholar] [CrossRef]
- Rath, J.J.; Defoort, M.; Karimi, H.R.; Veluvolu, K.C. Output Feedback Active Suspension Control With Higher Order Terminal Sliding Mode. IEEE Trans. Ind. Electron. 2017, 64, 1392–1403. [Google Scholar] [CrossRef]
- Liu, Y.; Chen, H. Adaptive Sliding Mode Control for Uncertain Active Suspension Systems With Prescribed Performance. IEEE Trans. Syst. Man. Cybern 2020, 1–9. [Google Scholar] [CrossRef]
- Na, J.; Huang, Y.; Wu, X.; Su, S.F.; Li, G. Adaptive finite-time fuzzy control of nonlinear active suspension systems with input delay. IEEE Trans. Cybern. 2019, 50, 2639–2650. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.J.; Zeng, Q.; Tong, S.; Chen, P.; Liu, L. Adaptive neural network control for active suspension systems with time-varying vertical displacement and speed constraints. IEEE Trans. Ind. Electron. 2019, 66, 9458–9466. [Google Scholar] [CrossRef]
- Zhao, R.C.; Xie, W.; Wong, P.K.; Cabecinhas, D.; Silvestre, C. Adaptive vehicle posture and height synchronization control of active air suspension systems with multiple uncertainties. Nonlinear Dyn. 2020, 99, 2109–2127. [Google Scholar] [CrossRef]
- Tee, K.P.; Ge, S.S.; Tay, E.H. Barrier Lyapunov functions for the control of output-constrained nonlinear systems. Automatica 2009, 45, 918–927. [Google Scholar]
- Tee, K.P.; Ren, B.; Ge, S.S. Control of nonlinear systems with time-varying output constraints. Automatica 2011, 47, 2511–2516. [Google Scholar] [CrossRef]
- Jin, X. Adaptive Fixed-Time Control for MIMO Nonlinear Systems With Asymmetric Output Constraints Using Universal Barrier Functions. IEEE Trans. Autom. Control 2018, 64, 3046–3053. [Google Scholar] [CrossRef]
- Xie, W.; Reis, J.; Cabecinhas, D.; Silvestre, C. Design and experimental validation of a nonlinear controller for underactuated surface vessels. Nonlinear Dyn. 2020, 102, 2563–2581. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Symbol | Description |
|---|---|---|---|
| height of vehicle sprung mass | sprung mass of quarter vehicle | ||
| unsprung mass displacement | unsprung mass of quarter vehicle | ||
| desired height | desired change of air mass for air spring | ||
| road excitation | area of adjustable air spring | ||
| initial height of sprung mass | maximum value of desired height | ||
| damping coefficient of damper | maximum value of sprung height | ||
| air spring pressure | time-varying disturbances | ||
| initial air pressure | maximum value of disturbances | ||
| air spring volume | tire stiffness | ||
| heat transfer rate | u | control input | |
| air spring force | damping force |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 178 (mm) | 9 | ||
| b | 40 | ||
| 4 | |||
| 100 | |||
| 1.4 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, R.; Xie, W.; Zhao, J.; Wong, P.K.; Silvestre, C. Nonlinear Ride Height Control of Active Air Suspension System with Output Constraints and Time-Varying Disturbances. Sensors 2021, 21, 1539. https://doi.org/10.3390/s21041539
Zhao R, Xie W, Zhao J, Wong PK, Silvestre C. Nonlinear Ride Height Control of Active Air Suspension System with Output Constraints and Time-Varying Disturbances. Sensors. 2021; 21(4):1539. https://doi.org/10.3390/s21041539
Chicago/Turabian StyleZhao, Rongchen, Wei Xie, Jin Zhao, Pak Kin Wong, and Carlos Silvestre. 2021. "Nonlinear Ride Height Control of Active Air Suspension System with Output Constraints and Time-Varying Disturbances" Sensors 21, no. 4: 1539. https://doi.org/10.3390/s21041539