3.1. Results from the First Experiment Using Dräbensted’s Algorithm for a Combined Signal
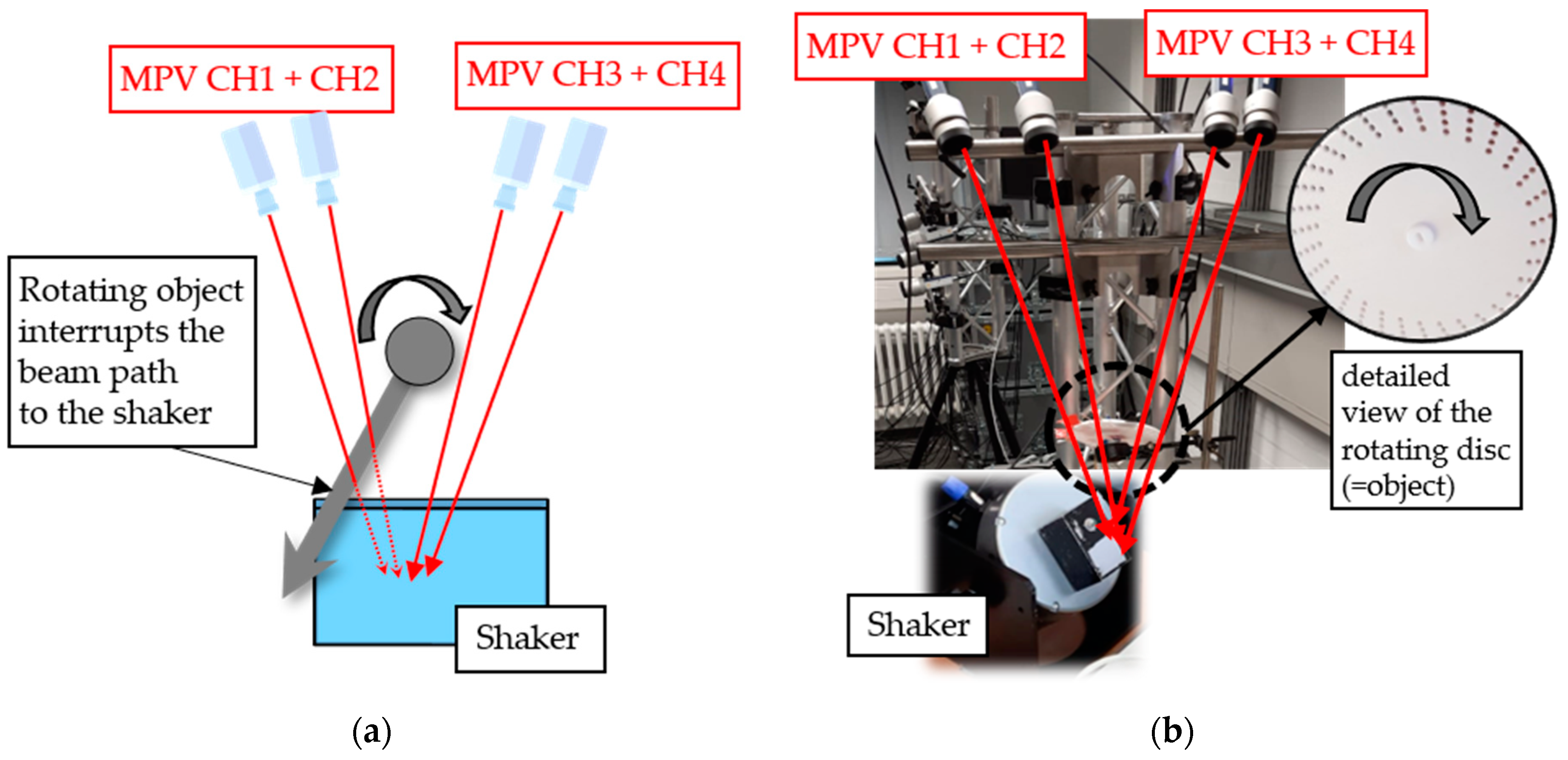
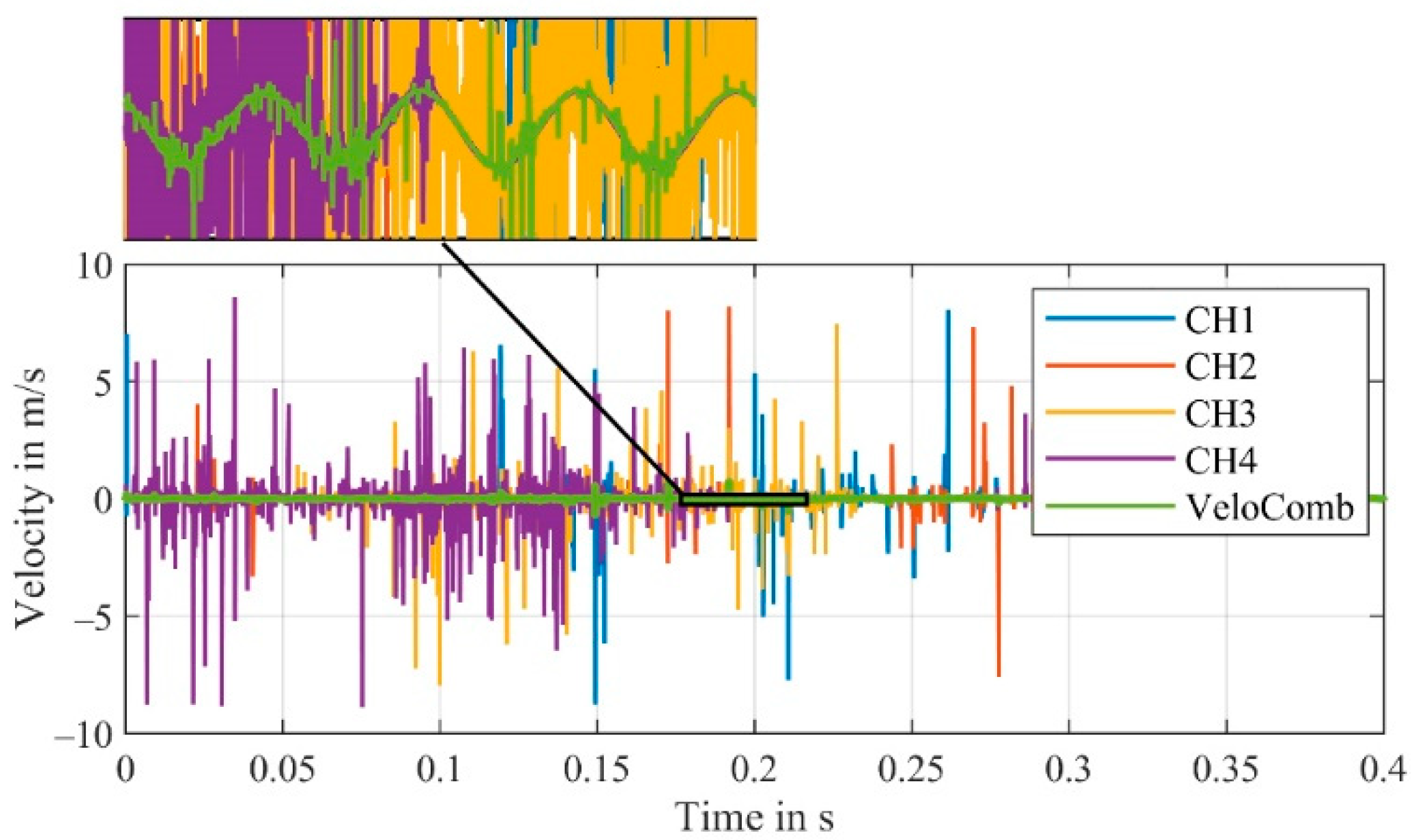
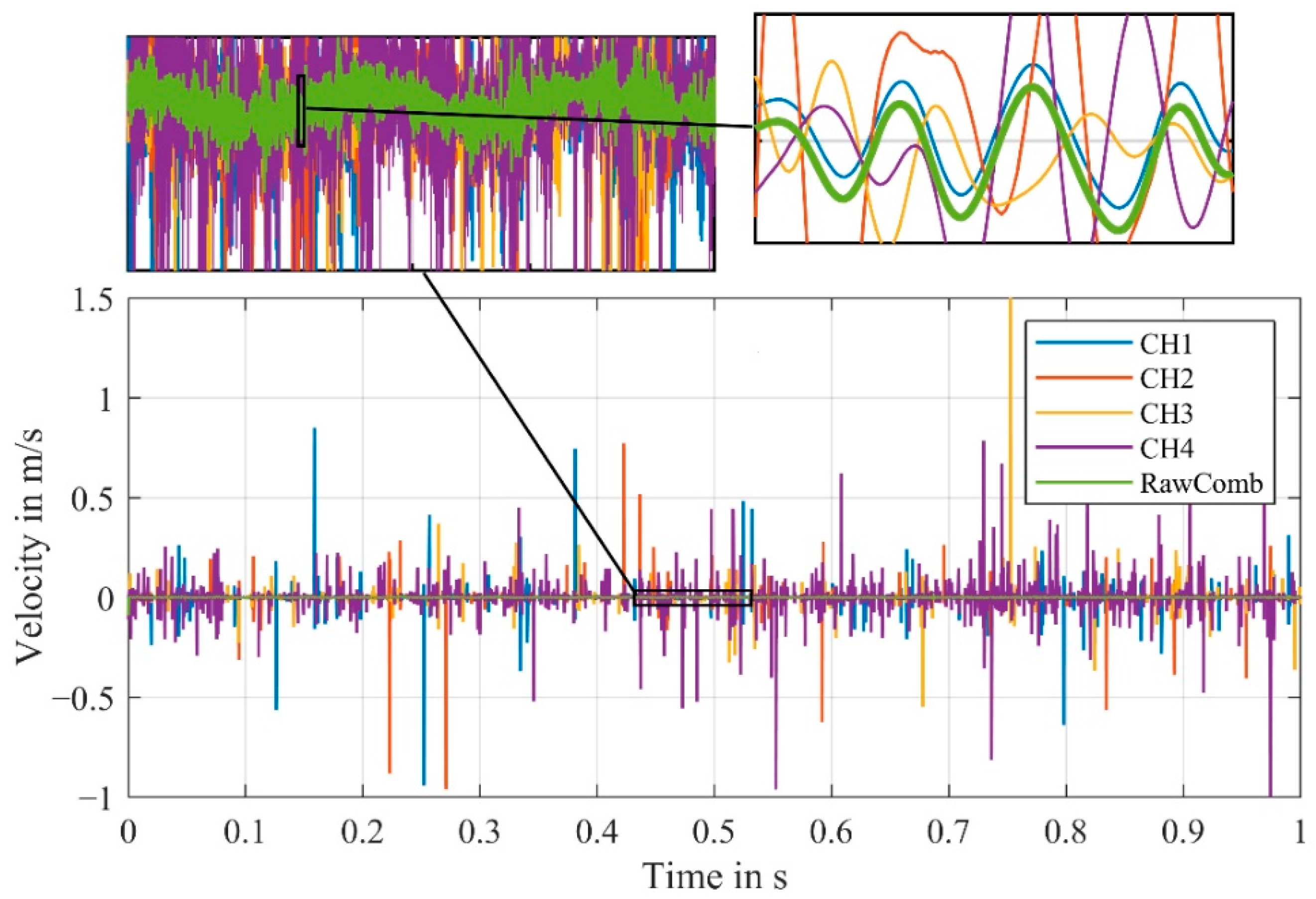
The four signals of a measurement obtained from the first experimental setup, as shown in
Figure 1, are demodulated and the resulting velocity signals are displayed in
Figure 3. In addition, the combined signal derived from the velocity signals of CH1–CH4 with Equations (1) and (2), is also pictured.
In
Section 3.2, a detailed explanation of the implemented algorithm for raw signals can be found, which is applicable to velocity signals as well.
For the channels CH1–CH4, strong peaks (due to signal dropouts) are visible in the velocity signals. In our application with forced signal dropouts, we know that at any time a channel exists, where a signal without any disturbances can be detected. This fact can generally be assumed for any signal, as the signal dropouts caused by the laser speckle effect are stochastically independent [
21].
We can confirm this by examining the combined signal (VeloComb from [
21] in
Figure 3). In contrast to the individual velocity signals (CH1–CH4), the vibration of the shaker at 100 Hz is clearly visible in the combined signal.
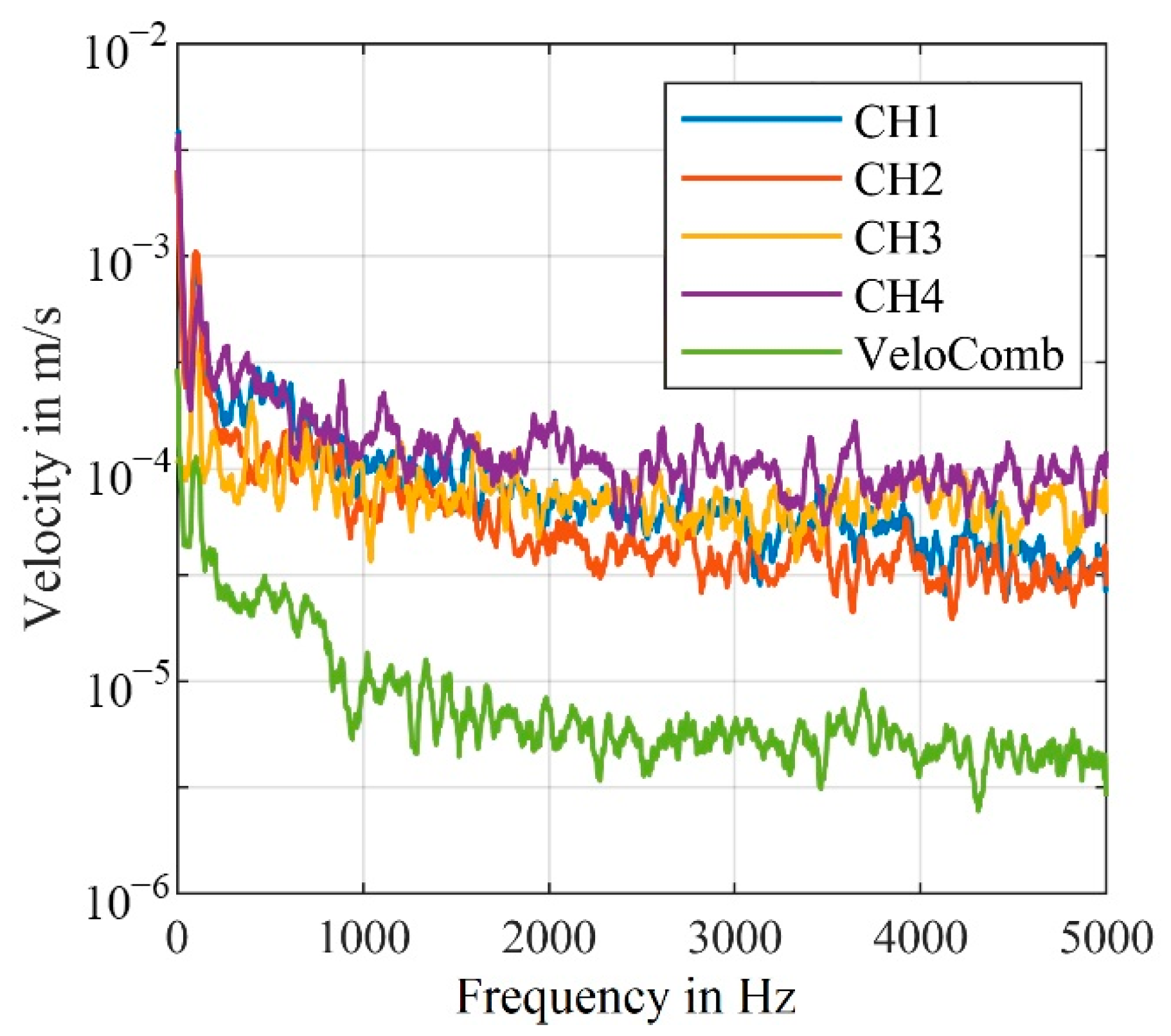
The functionality of the algorithm can also be shown in the spectral results of this measurement shown in
Figure 4. It should be mentioned that the detected frequency at 100 Hz has approx. The same amplitude for all signals; however, the noise level of the combined signal is significantly lower.
3.1.1. Limitations of the Algorithm
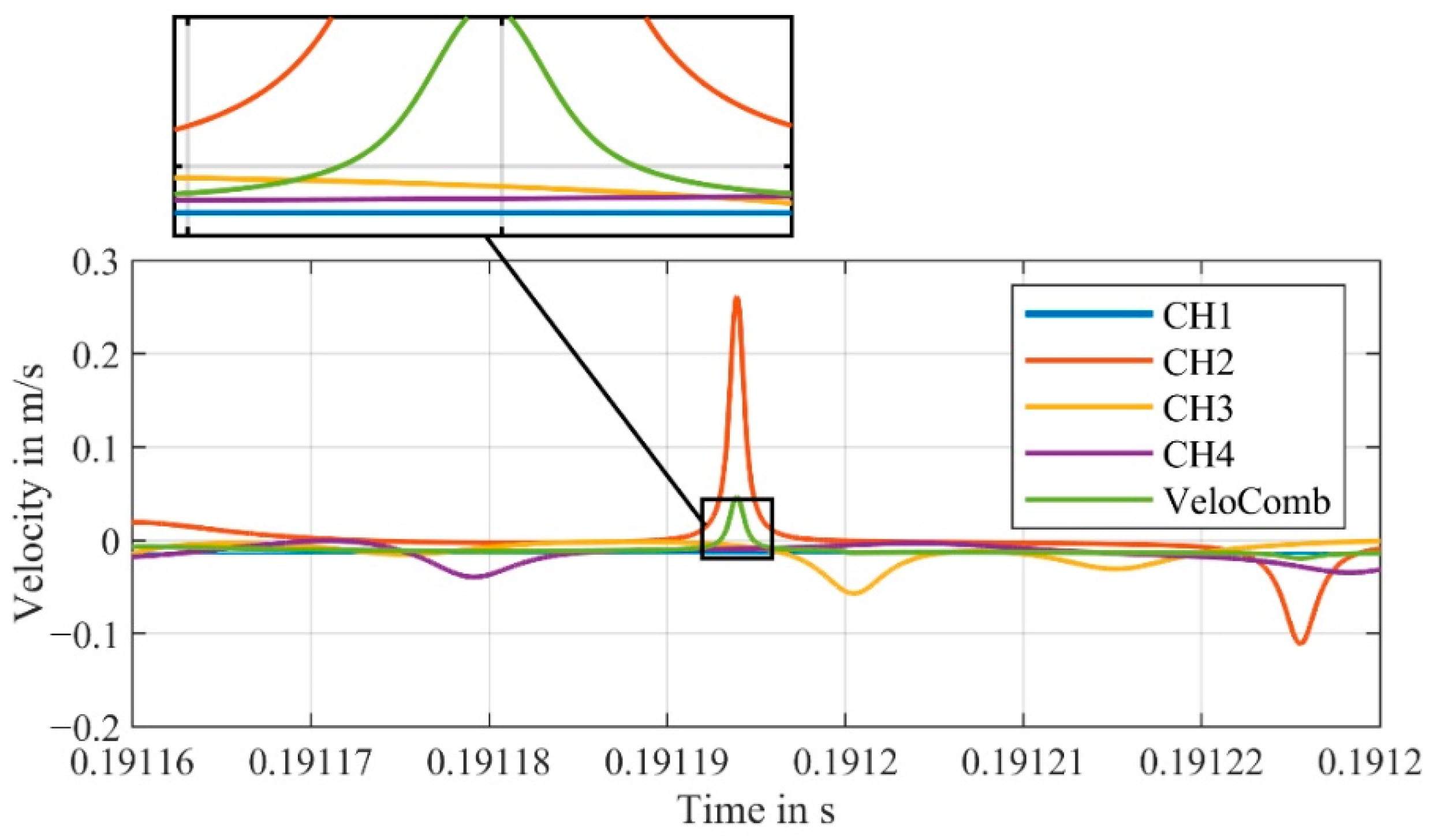
Upon closer inspection of the velocity signal of the combined signal (VeloComb), some smaller noise peaks can still be seen. For a better illustration, a magnified section of the velocity signals from
Figure 3 are shown in
Figure 5.
The cause of these peaks can be explained by examining the weighting factors
from Equation (2), required for the determination of the combined signal. We calculate these with a section of the signal with a length of 1000 samples. In the section shown in
Figure 5, the weighting factors are
and
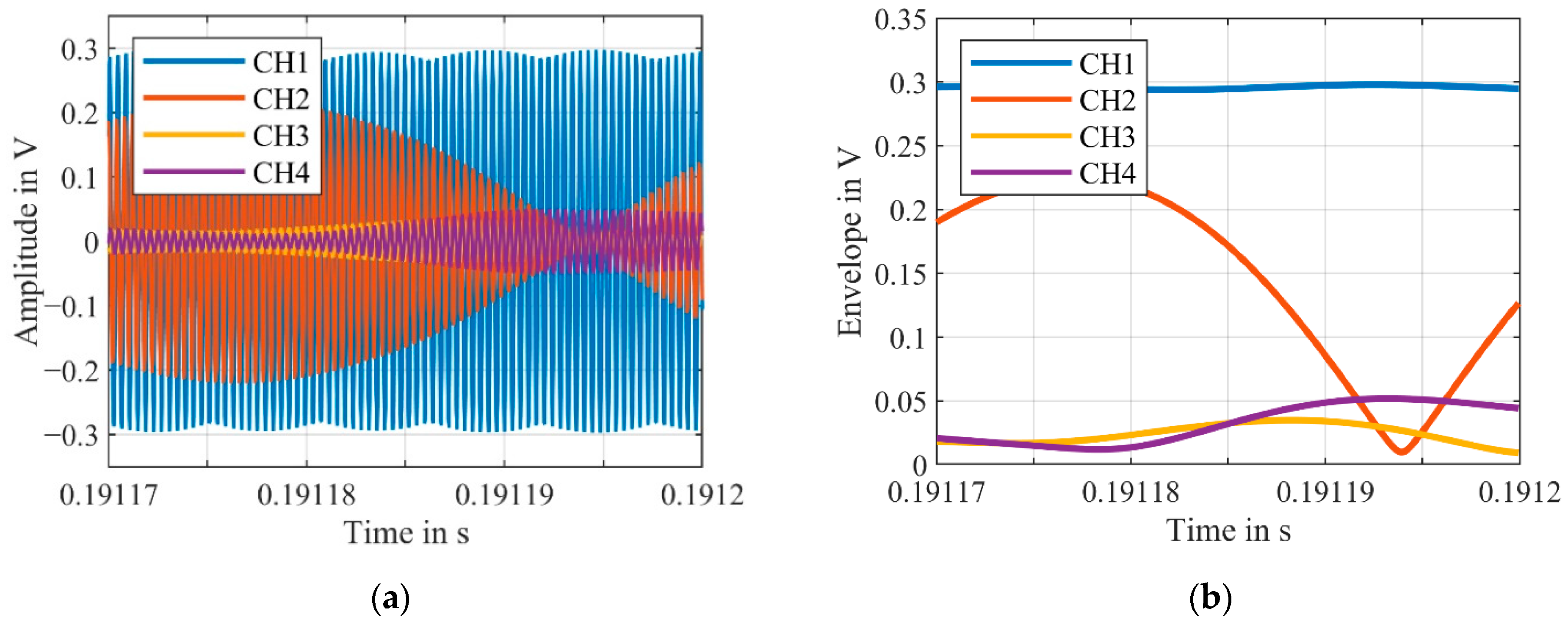
. Thus, CH1 has the greatest influence on the combined signal at 80%. Considering the corresponding section of the raw signal, shown in
Figure 6, this estimation is realistic.
Considering
Figure 5 and
Figure 6, the cause of the peaks of the combined signal can be attributed to the voltage drop of CH2, which is illustrated with the upper signal envelope of the raw signals, shown in
Figure 6b. Despite a small weighting factor for CH2, this causes a large peak in the resulting combined velocity signal.
An additional source of error are the transition points of the sections where discontinuities can occur. This will be discussed in more detail further in the paper.
To account for the error of the voltage drop from CH2 (possibly caused by a signal dropout), needs to be close to zero at the displayed section. For this purpose, the time interval used for deriving the weightings factors must be shorter than approximately 5 s. Depending on the sampling rate (we recorded 10 MSamples and sampled with either 25 MHz or 10 MHz, which is both sufficient for the carrier frequency of 2.5 MHz), this corresponds to 200 or 80 samples for the determination of the CNR to calculate the weighting factors .
In addition to the significantly increased computing cost, the susceptibility to errors of the calculated CNR is significantly higher with fewer samples. This in turn can lead to further errors that cannot easily be compensated. Therefore, the signal quality is only slightly better even with a short sample length for determining the weighting factors.
A possible solution to this problem is to use a considerably higher sample rate, which leads to an exponentially higher computing cost and, therefore, is not possible.
An easier to implement method to prevent these errors is to introduce an exponent in the calculation of the weighting factors. This still only works in certain cases and is implemented in Equation (6) in the following section, which describes a modified algorithm developed by us.
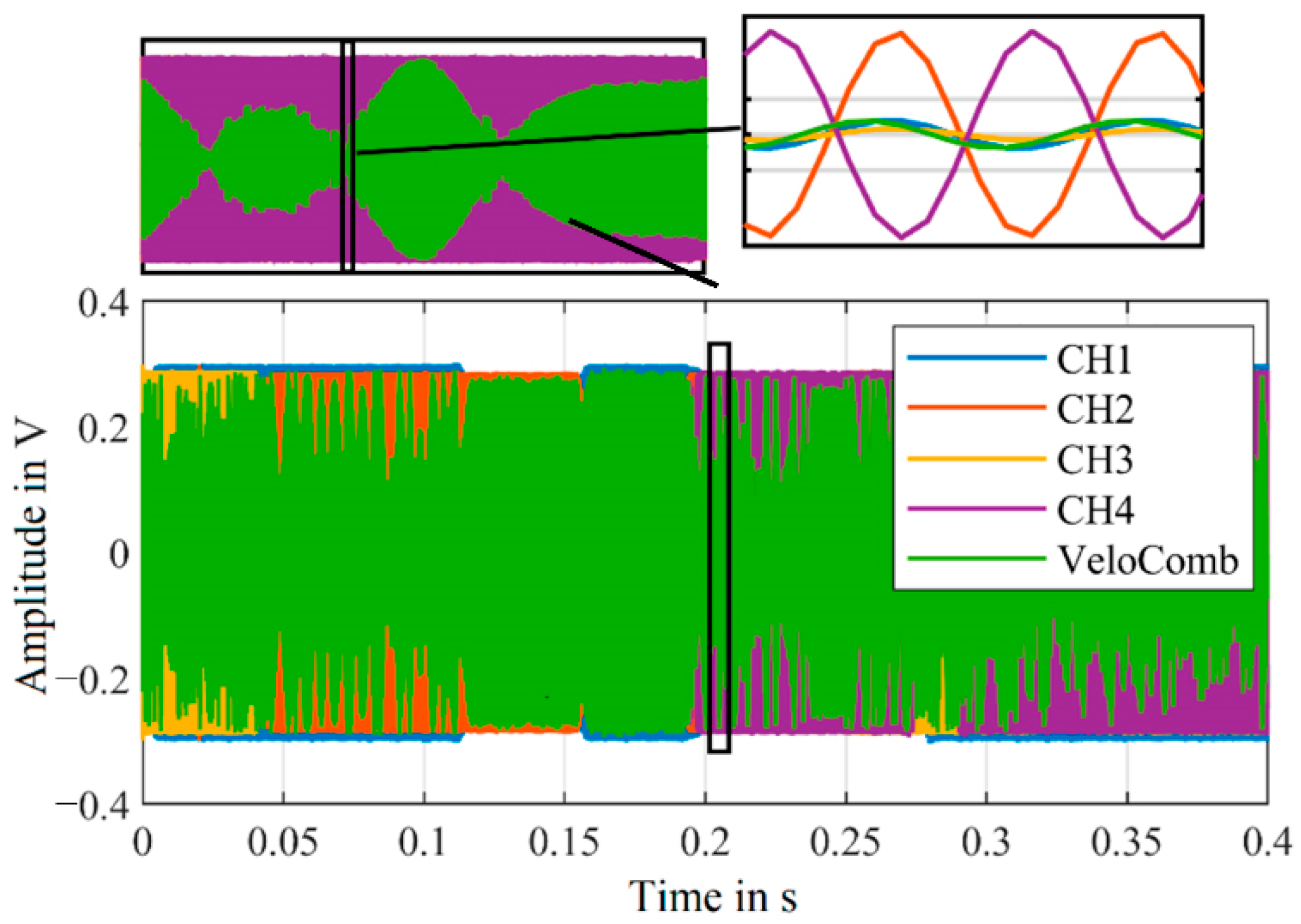
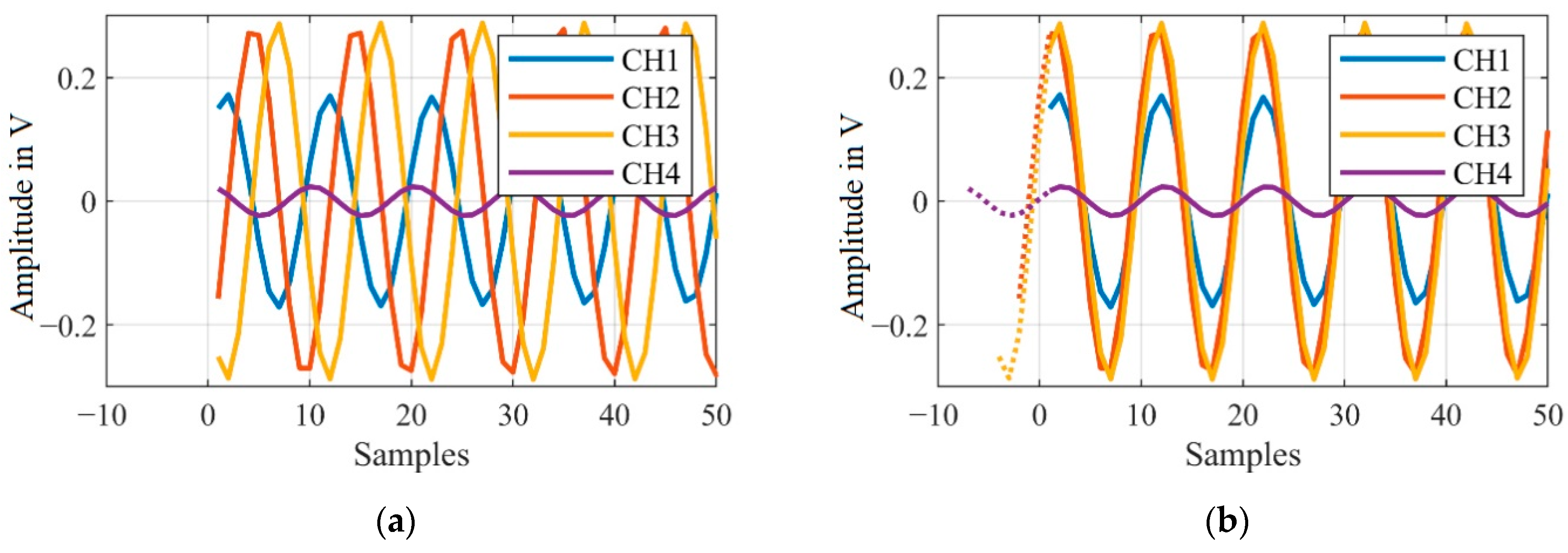
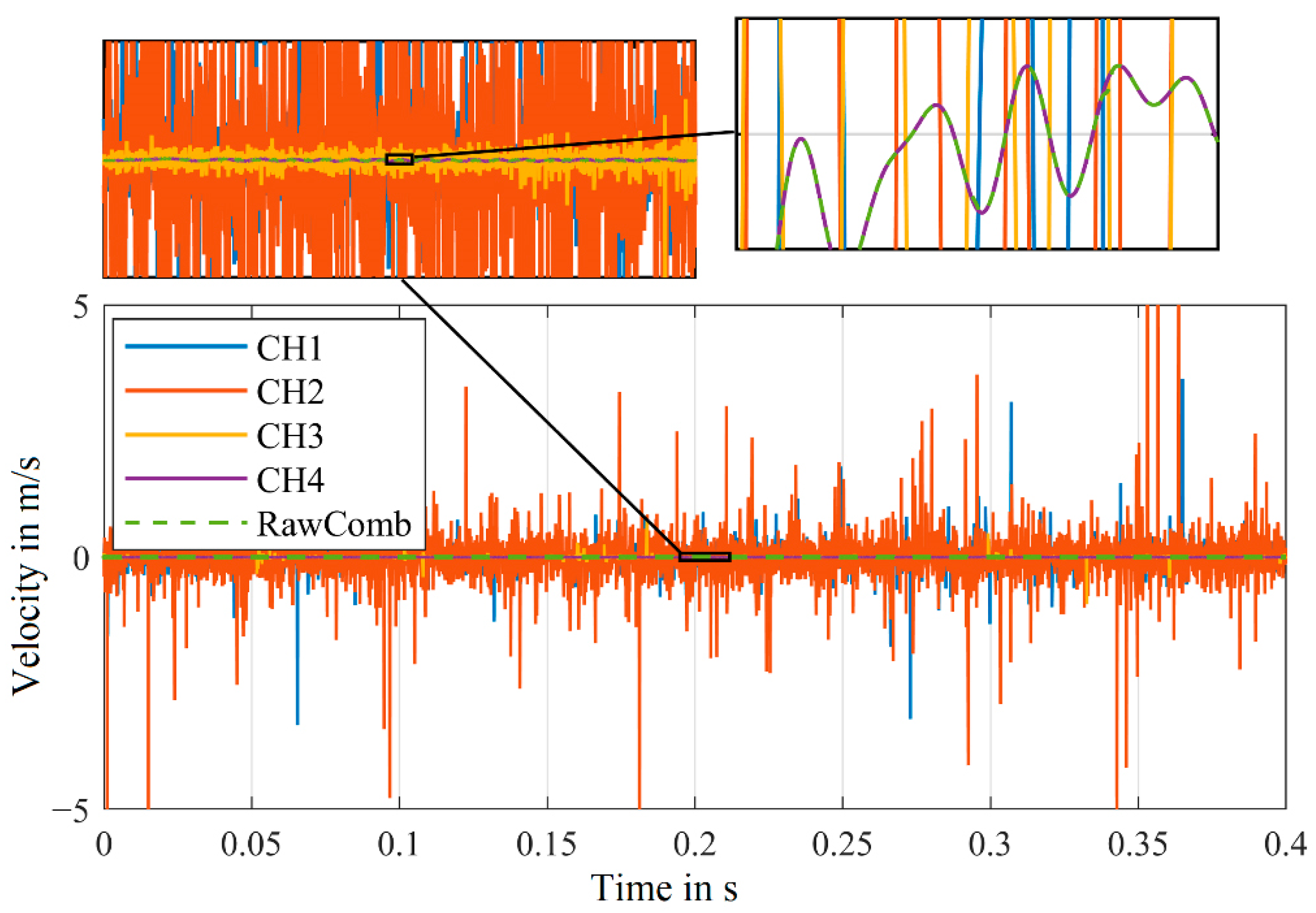
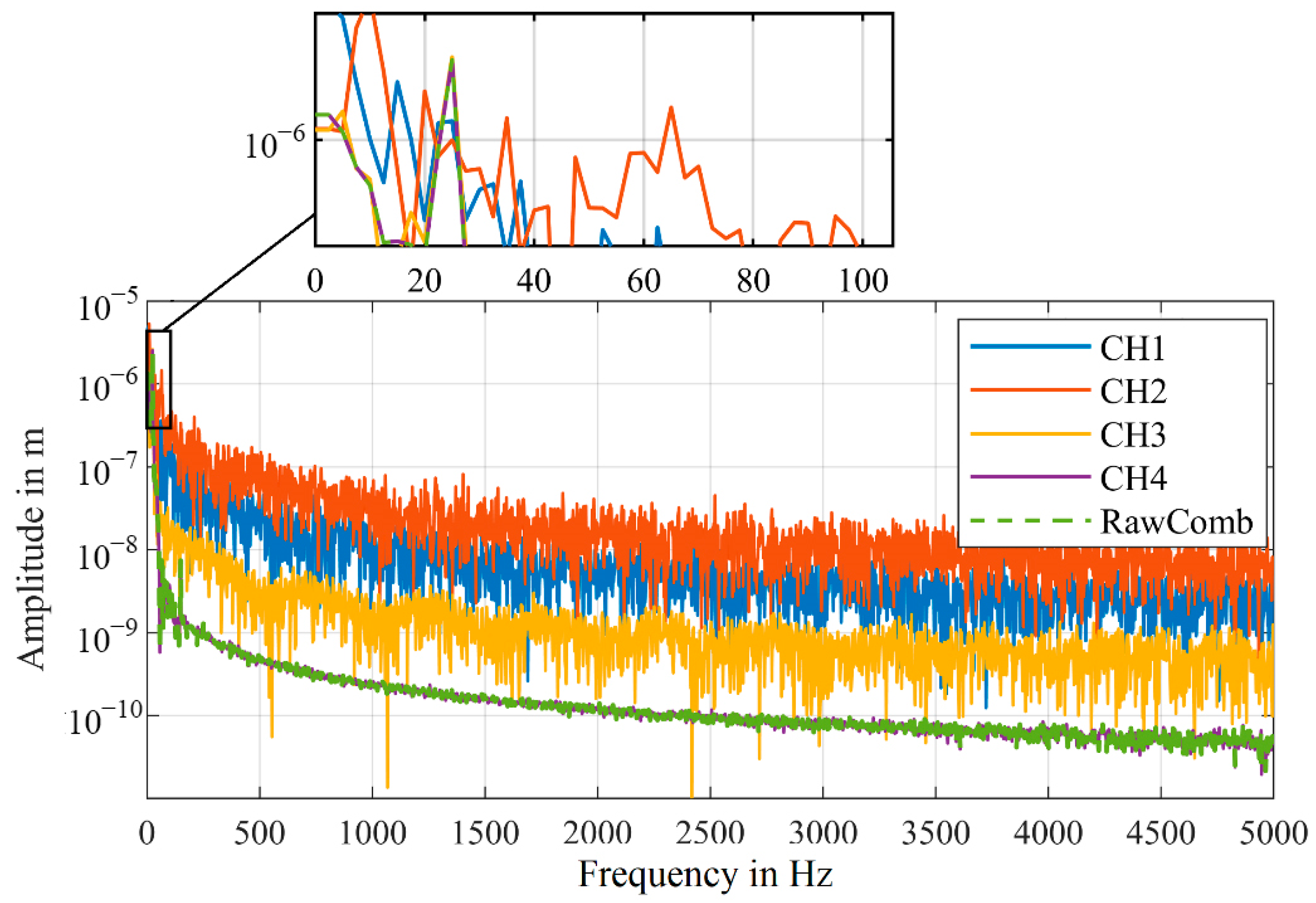
Another approach for signal optimization is the combination of the raw signals of the individual channels instead of the velocity signals. However, there is a non-constant phase difference of the individual channels, which prevents a simple addition of the raw signals [
21]. Therefore, a simple addition of the signals can lead to an elimination of the combined signal. This is illustrated in
Figure 7, showing the combined signal calculated from the raw signals from the first experimental setup, shown in
Figure 1, based on the weighting factors from Equation (2).
At the magnified section (top right in
Figure 7), the combined signal is obtained from equal parts of CH2 and CH4 by the weighting factors. As these channels have a similar amplitude and are shifted by approx. 180° in their phase, the resulting signal is close to zero.
Overall, the algorithm from Dräbenstedt [
21] for calculating the combined signal does still yield very good results, as shown in
Figure 3 and
Figure 4. In the following sections we attempt to further improve the results of the combined signal, to achieve an even better signal reliability.
3.2. Modified Algorithm to Obtain the Combined Signal from Raw Signals
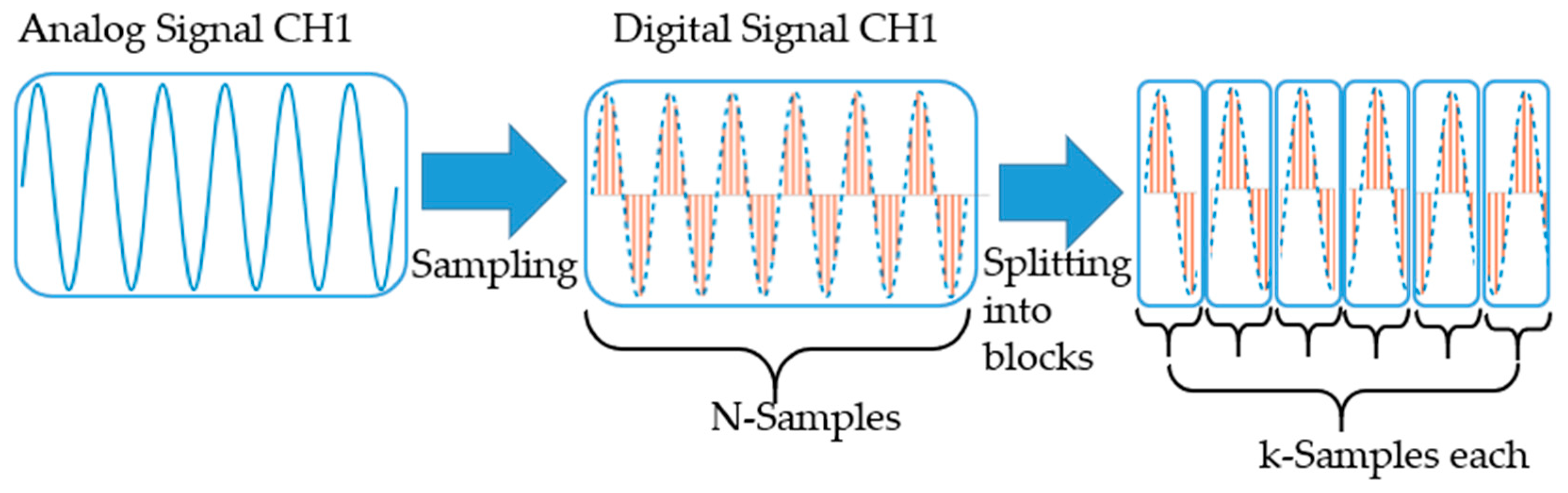
In order to solve the discontinuity problems at the transition points of the sections, an examination of these transition points is necessary. In this section we examine, if the problem of the non-constant phase difference of the raw signals of the individual channels with respect to each other can be solved simultaneously.
For this purpose, the individual channels are digitized with a sampling rate Fs (either 10 or 25 MHz). Each digital signal consists of N samples (here 10 MSamples) and is subsequently split into blocks with a length of k (here 1000 samples). As mentioned above, a much shorter block length requires a lot of computing power and causes problems in the reliable determination of the CNR for the weighting factors. This process is illustrated for a channel in
Figure 8.
The weighting factors are then calculated for the resulting blocks of the four channels depending on the signal strength. These weighting factors can be calculated either in the time or frequency domain (for calculating the CNR). For the calculation in the time domain, an auxiliary factor is calculated from the median of the absolute value of the block of a signal according to Equation (4).
Alternatively, this factor can be determined in the frequency domain according to Equation (5) with the CNR, which is calculated
The factors
which are proportional to the signal strength, are then normalized so that their sum is one. The resulting weighting factors
, for one block of the length k, are thus calculated by Equation (6).
The exponent α allows a stronger weighting to be implemented. For large α the weighting of the channels with greater signal strength in the combined signal is exponentially increased (for
). For the calculation via the CNR and for α = 1, these factors are equivalent to the factors calculated by Equation (2). For α > 2 the shown problem in
Figure 5 can already be decreased significantly. The combined signal can then be calculated blockwise from the resulting weighting factors
.
Altogether, the combined raw signal
is given by Equation (7), with N total samples split into
blocks, with a length of k samples each (in this case
).
The result of the calculation using Equation (4) or Equation (5) differs only slightly, as both methods have a similar proportionality to the signal strength. For future work we will consider their computing times.
As mentioned above, one problem with this calculation are discontinuities at the combined signal blocks, which contribute to a distortion of the signal and to a higher noise level. Furthermore, there is a time-invariant phase offset between the individual raw signals, which, as shown in
Figure 5, can lead to an elimination as well as other incorrectly detected frequencies. To solve this, we implemented an algorithm that shifts the blocks of the individual channels in phase by means of peak detection, to match their phase. The algorithm first finds the peaks
of the sinusoidal raw signals by Equation (8). We implemented this with the MATLAB
TM function
peaks, but a customized implementation via a local maxima detection is also possible.
Then the sample length of the phase offset
is calculated in Equation (9) by using the first detected peak
with the calculated sample length of the phase offset
the individual raw signals are phase shifted according to Equation (10).
An example of a small section of one block of the raw signals before and after correction, is shown in
Figure 9.
In the selected section of the raw signal, the first detected peak amplitude belongs to CH1, consequently all other channels are aligned accordingly. In this case CH2 is shifted by three samples, CH3 by five samples and CH4 by eight samples.
Afterwards, the samples before and after the transition points are interpolated to correct missing samples due to the phase shift and discontinuities due to the blockwise combination.
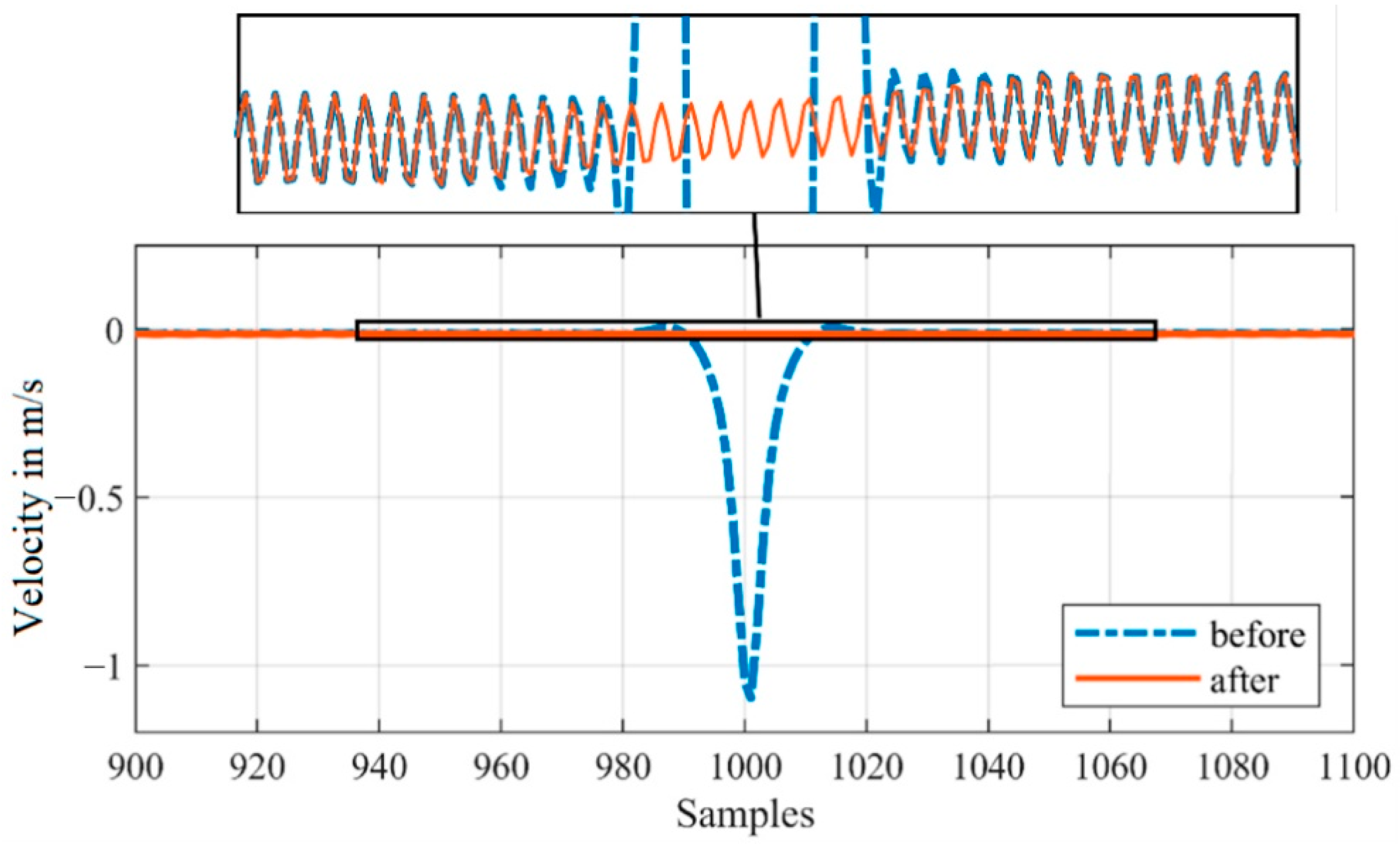
In
Figure 10, a small section of the combined demodulated velocity signal around a transition point of two blocks (between j = 1 and j = 2 with k = 1000) is shown before and after interpolation.
Due to this preceding method, we can minimize the impact of both the discontinuities and the phase offset without distorting the original signal, as can be seen by the magnified section in
Figure 10.
This is possible, because these errors always occur in the same locations around the transition points. Errors similar to the one shown in
Figure 5 are random and therefore much harder to compensate.
3.3. Comparison of the Algorithms
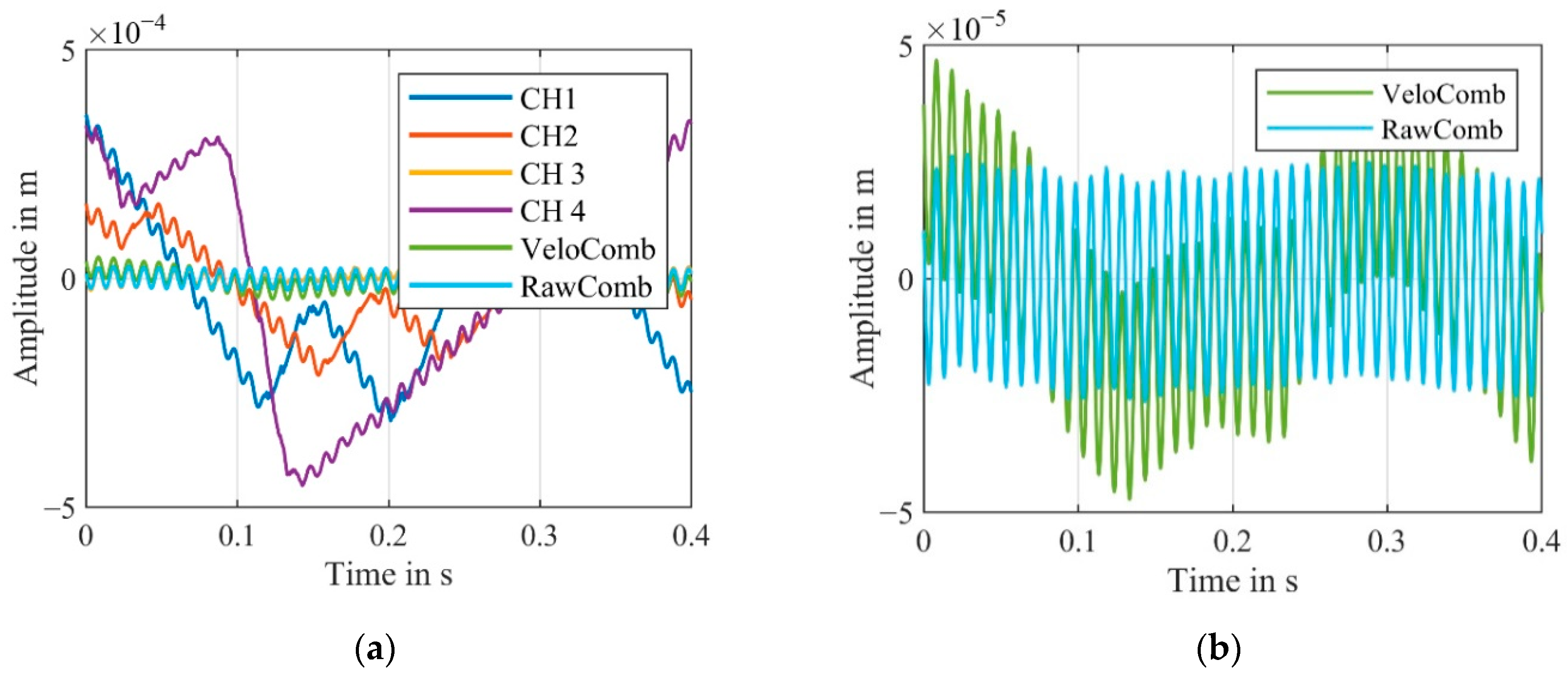
With our modified algorithm a combined velocity signal is calculated (with α = 5) from the same measurement and from the first experimental setup as before. The combined signal from the raw channels, the demodulated velocity signals of the individual channels and the combined signal from the velocity signals is shown in
Figure 11.
The resulting velocity signal from our algorithm is significantly less noisy. The peaks of the combined signal, in comparison to the combined signal derived from the demodulated velocity signals, are mostly gone.
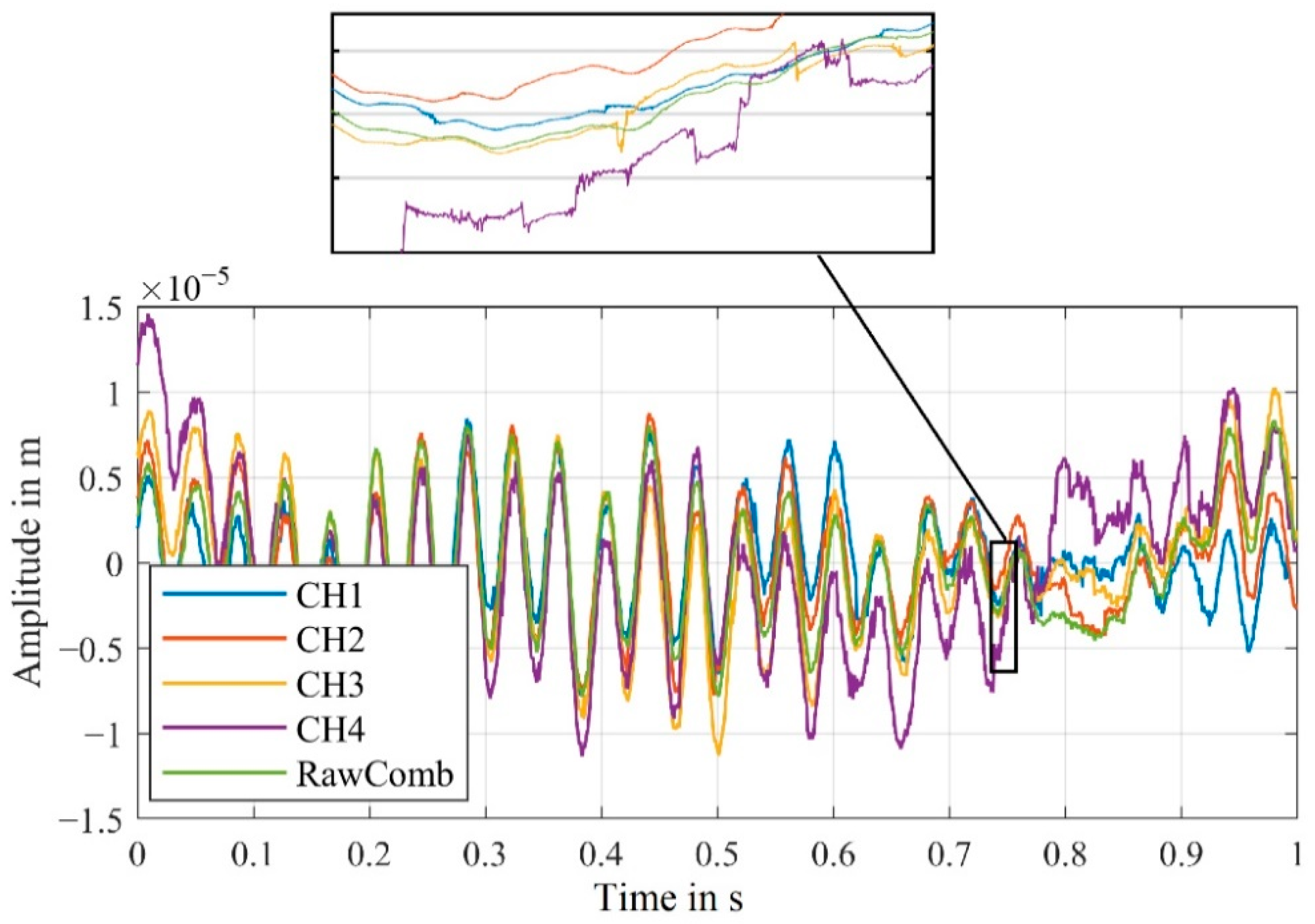
Figure 12 additionally shows the displacement signals derived from the velocity signals. The offset resulting from the difference between the actual carrier frequency and the carrier frequency assumed for demodulation was compensated for each signal.
The functionality of the algorithms is evident in both combined signals—because most of the time just one channel is affected by signal dropouts, this time segment can be replaced in the combined signal by the other channels.
The shaker’s vibration frequency of 100 Hz is visible in all signals. For the combined signal from the old algorithm, a slight offset can still be seen compared to the combined signal from the algorithm developed by us. The cause of this offset can be explained by the disturbances visible in the velocity signal in
Figure 11.
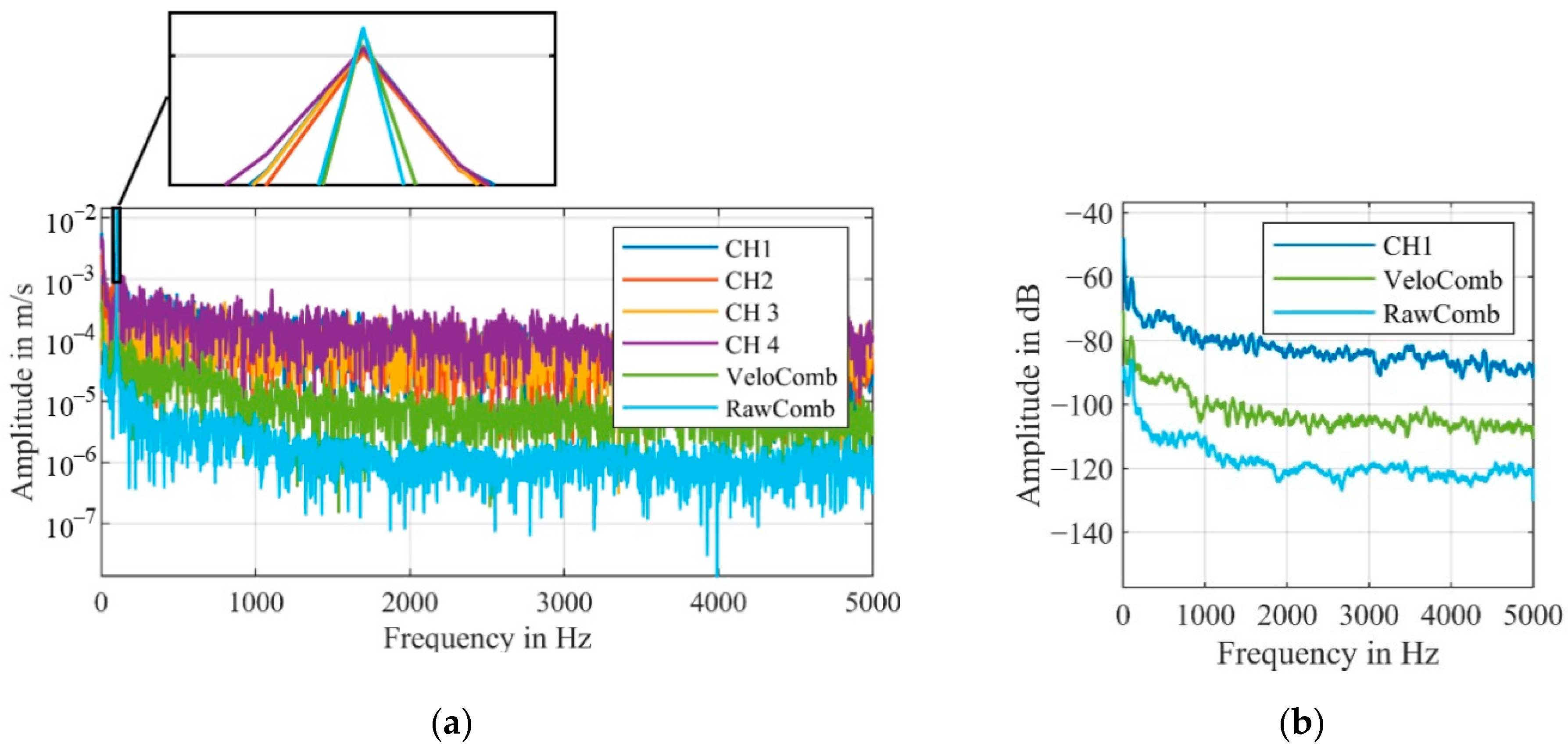
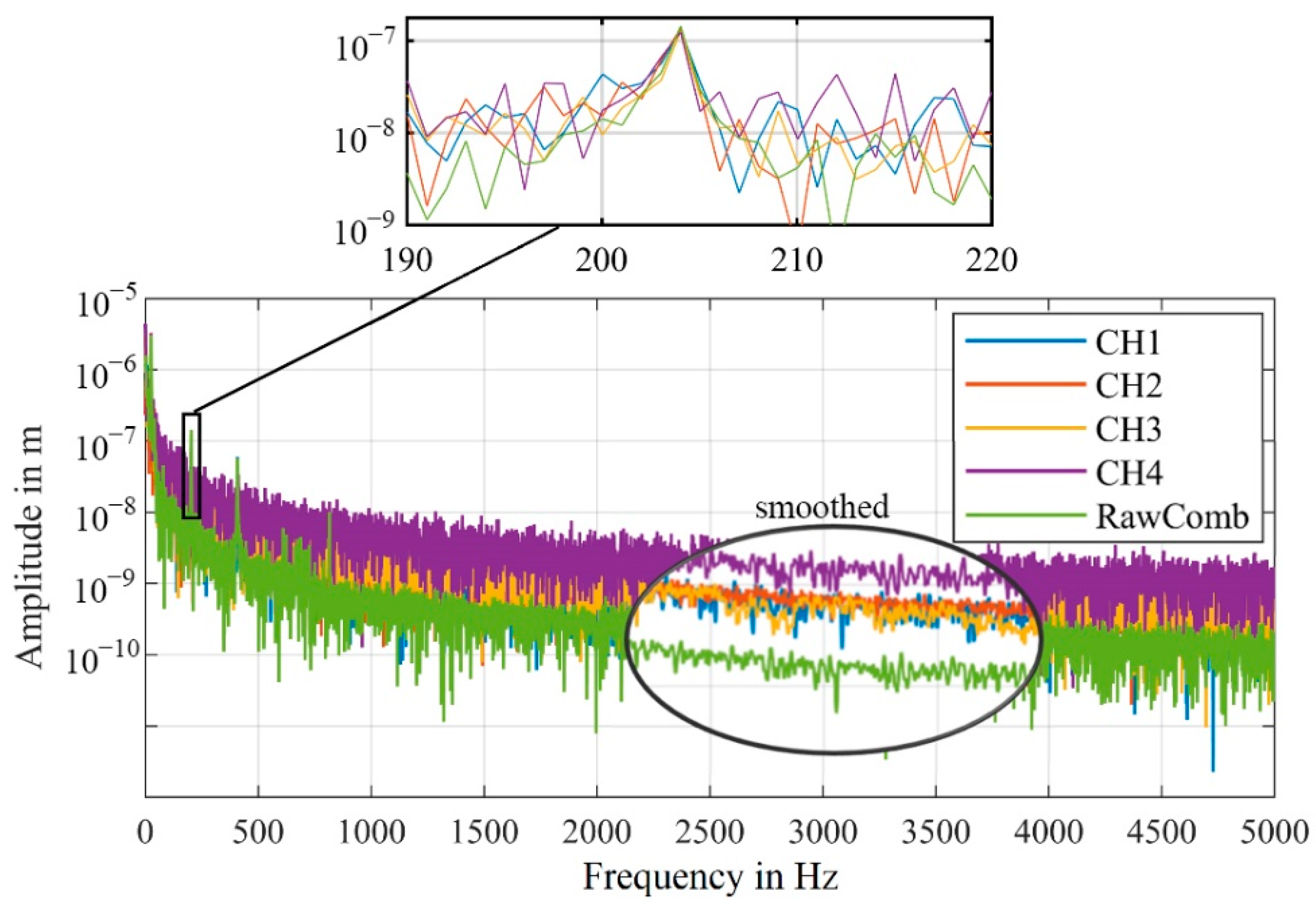
The difference between the algorithms can also be shown by the significantly lower noise in the frequency spectrum, as shown in
Figure 13.
The relatively large amplitude of the shaker at 100 Hz is detected with a similar amplitude in all four channels as well as in the combined signals. Because of the signal dropouts, forced by our setup, in the individual channels, the noise level is significantly higher.
For CH1 and CH2, the amplitude at 100 Hz is just slightly above the noise level, making the detection of an unknown frequency unrealistic. Generally, only higher amplitudes can reliably be detected in the individual channels, that are affected by signal dropouts.
In order to estimate the noise reduction more accurately,
Figure 13b shows the smoothed frequency spectra of the combined as well as one individual velocity signal. For this measurement, the algorithm, that calculates the combined signal from the velocity signals (VeloComb), reduces the mean noise level in the frequency range up to 5000 Hz by 17 dB. Our algorithm that calculates the combined signal from the raw signals (RawComb) decreases the mean noise level by an additional 15 dB. Therefore, only the algorithm using the raw signals will be described in the following parts of this article, as it consistently achieves better results.
All previously shown results used measurements from the first experimental setup, which had the main objective of generating a reliable, reproducible signal as a basis for developing and testing the presented algorithm. To test our algorithm further, the results from the second experiment with only one active channel, which is much closer to real world applications, are presented in the following section.
3.3.1. Further Examination of the Developed Algorithm through the Second Experiment
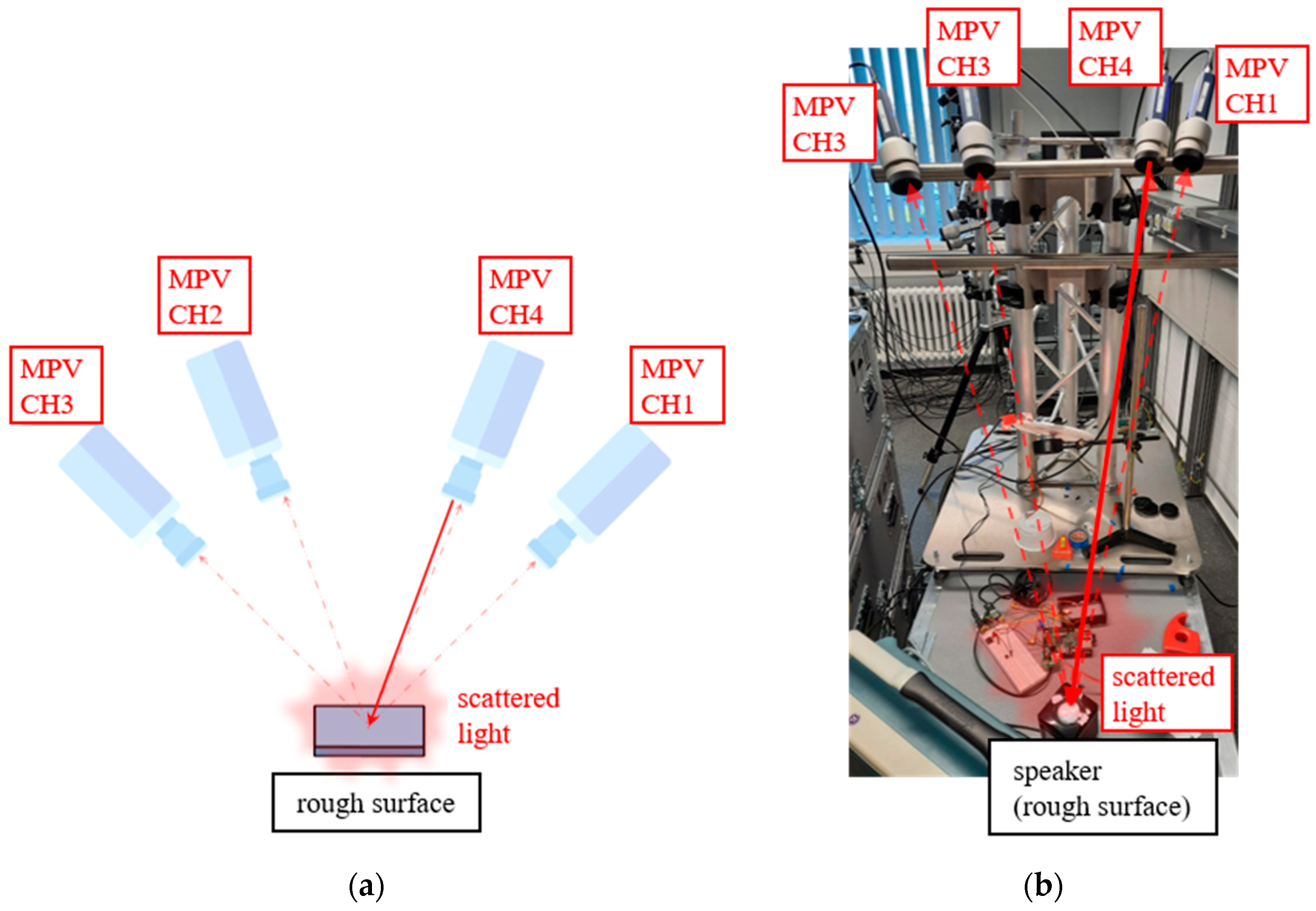
The first experiment results in predictable signals that are helpful for the development of the algorithm. The signals are thus applicable to real world applications in a limited extent only. For a more representative comparison, the second experiment is more suitable. Using the experimental setup for the second experiment shown in
Section 2, measurements are recorded and demodulated (Fs = 10 MHz, RBW = 1 Hz). In
Figure 14, the demodulated velocity signals of the four channels as well as a combined signal derived from the four raw signals of one measurement are shown. By aiming the measuring beam at a poorly reflecting part of the speaker, the signal level is relatively low and signal dropouts can be seen in the demodulated signal.
Compared to the measurement from the first experimental setup on the shaker and four active channels, the measurement on the speaker and only one active channel results in a considerably higher noise level in the velocity signals.
For the active channel CH4 and the passive channels CH1–CH3, numerous signal dropouts can be seen. Since the signal dropouts are uncorrelated, it is likely that one channel detects the vibration of the speaker at any given time. The fundamental vibration of the speaker at 205 Hz is recognizable in the displacement signals derived from the velocity signals, shown in
Figure 15.
The disturbances of the individual channels are also visible in the displacement signals, resulting in a higher noise level of the frequency spectra, shown in
Figure 16.
Due to the lower noise level of combined signal, the functionality of the algorithm can be shown. The relatively large amplitude of the speaker’s vibration frequency is detected almost identically by all signals. With these results, we can demonstrate that the algorithm yields good results for close to real-world applications. For this measurement, the mean noise level in the frequency range up to 5000 Hz of the combined signal (RawComb) was reduced by 10 dB compared to the mean noise level of the signals of the individual channels.
3.3.2. Conditions for Successful Diversity Measurements
For a successful measurement, a correct alignment of the passive measuring heads is essential, otherwise insufficient amounts of light reach the detectors resulting in a correspondingly poor signal quality.
Figure 17 shows an example of such a case.
For this purpose, the measurement object is arbitrary since the aim of this section is only to demonstrate a measurement with incorrect alignment. For this measurement, the speaker was removed, and the measurement was conducted on the laboratory table underneath (no active vibration). The resulting poor alignment of the measuring heads results in a poor signal quality for all passive channels, as very little light reaches the sensors of the measuring heads. This causes numerous peaks in the velocity signals of CH1 and CH2. In such a case, the combined signal obtained by our algorithm is largely equivalent to the signal with the highest signal strength (in this case CH4). This is visible in the matching velocity signal in
Figure 17 and in the almost identical frequency spectrum, shown in
Figure 18.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

















