1. Introduction
The performance of some sound field control applications, such as sound field reproduction and active noise control (ANC), is limited by the physical presence of traditional microphones [
1,
2]. Although the sizes of traditional condenser microphones, including microelectromechanical systems (MEMS) microphones, can be reduced, other associated components (e.g., power supply and data transmission cables) are still required. This is more commanding for fibre-optic microphones [
3,
4], where the optical fibres carrying the light beams cannot be made wireless.
In ANC headrest systems, for example, the aim is to reduce the sound at a user’s ears with error microphones installed therein. This is not desirable in practice due to their intrusiveness to the user. As the first proposal of such a system [
5], it has been one of the main factors limiting the performance. To solve this problem, various virtual sensing algorithms have been proposed to use error microphones placed remote from the user to estimate the sound pressure level (SPL) at the user’s ears [
6]. Although such techniques have realised some improvements [
7,
8], one of the disadvantages is that a large number of microphones are required to control broadband noise originating from various sources. Similar problems also exist in multi-zone sound field control applications [
9]. It is, therefore, desirable to develop a remote acoustic sensing system that can cause little intrusion and interference.
A laser Doppler vibrometer (LDV) is a scientific instrument that is used to make non-contact measurements of surface vibration [
10,
11]. With a very high sensitivity and dynamic range (commercial instruments can measure displacements down to pm (pico-metres) and/or velocities down to nm/s resolution and up to the ’0s m/s peak), it has been widely used in many acoustic and bio-acoustic applications [
12,
13,
14]. In many vibro-acoustic applications, the objects under investigation are present. The vibration levels of these objects can be measured directly by the LDVs for modal analysis and other characterisations [
13,
15,
16]. In many acoustic sensing and control applications, the sound-originating sources can be inaccessible, or the particular point of interest for the pressure measurement is at a space in an air volume. The typical approach is to use one or multiple condenser microphones. However, as mentioned above, the physical presence of the traditional microphones and the cabling imposes various limitations.
In this paper, a piece of retro-reflective tape is directly used as the diaphragm of the remote acoustic sensing arrangement instead of a piece of conventional ultrathin metallised polyester film or metal foil in conventional microphones [
2]. One of the benefits is that the tape can be readily excited, which can lead to a wide dynamic range for the solution. Furthermore, the use of the retro-reflective material allows the laser beam to be at a wide range of angles with retained effective performance [
17]. More importantly, the medium between the LDV and the sensing retro-reflective membrane is simply air, requiring no physical connection between the physical quantity “pick-up” and the signal conditioning. Many applications can potentially benefit from this configuration, for example, the ANC headrests. So far, as we understand, there have been no comprehensive studies on the use of retro-reflective film as a direct acoustic pressure sensing component when combined with LDVs. Even though the dynamic behaviour of membranes has received significant attentions, this has not yet included retro-reflective material membranes, and the related measured signal quality of LDVs when using them. These characteristics are crucial and must be determined before such pick-ups being used in acoustic sensing and control applications.
The theoretical model of the membrane is firstly reviewed to predict the dynamic behaviour, with experiments being carried out and compared to a traditional condenser microphone as a reference. Practical issues that are unique to the system, such as the incidence location, the incidence angle of the laser beam on the retro-reflective membrane and the delay of the measurement signal due to the alternative signal processing, are systematically investigated through a comprehensive series of rigorous experiments. Two particular examples are presented to further demonstrate the promising applications of the presented apparatus in typical scenarios.
The paper is organised as follows. The theoretical analysis of the vibration of a circular membrane is presented in
Section 2. An example of the membrane design is provided in
Section 3, accompanied by some discussions of the design. The experimental performance validation in various aspects is reported in
Section 4, followed by the practical application challenges presented in
Section 5. Some example practical applications and further considerations are presented in
Section 6. Conclusions are drawn in
Section 7.
2. Theoretical Development
The governing equation for a circular membrane shown in
Figure 1 can be written as [
18,
19]
where
is the membrane displacement,
r is the radial coordinate and
is the azimuthal coordinate.
and
p denote the incident sound pressure and the reaction pressure at the membrane surface, respectively.
K is the wavenumber of the membrane [
20,
21] with
where i is the complex number,
is the angular frequency,
and
T are the surface density and tension of the membrane, respectively.
is a damping factor.
The vibration of the membrane satisfies the boundary condition at the rim:
where
a is the membrane radius. The solution for Equation (
1) can be written as
where
is the
in vacuo modal shape of the membrane [
18], i.e.,
where
is the
m-th order Bessel function of the first kind.
can be obtained with Equation (
2) by using the natural frequency
determined by the boundary condition
.
The modal coefficients
in Equation (
4) can be obtained as [
22]
where
S is the membrane area.
The reaction sound pressure inside the backing cavity is governed by the Helmholtz equation [
23],
where
is the acoustic wavenumber with
being the speed of sound in air. The boundary conditions are
where
is the air density, and
D is the depth of the cavity.
The solution to Equation (
7) can be expressed with the modal expansion
where
, and the modal shape
can be written as
By substituting Equation (
9) into Equation (
8a), one can obtain the eigenvalues
from
. In addition, substituting Equation (
9) into Equations (8b) and (8c) yields, respectively,
Applying Equation (
9) into Equation (
6) with
and integrating over the membrane surface derives
where Equation (
11) is used to eliminate
,
denotes the coupling between the membrane vibration and the sound pressure inside the cavity [
23], which can be expressed as
where
is 1 for
and 0 for
,
is 1 for
and 0.5 for
.
The
th mode modal coefficient of the incident sound pressure at the membrane surface in Equation (
13) can be written as
where the incident sound pressure
is assumed to be uniform over the membrane surface.
Similarly, substituting Equation (
4) into Equation (
12) yields
Multiplying
on both sides of Equation (
16) and integrating over the membrane surface generates
where
and
for
.
By solving Equations (
13) and (
17) simultaneously, the modal coefficients
and
can be obtained, and
can then be derived from
in Equation (
11). After the modal coefficients are derived, both the membrane displacement and sound pressure inside the cavity can be calculated from Equations (
4) and (
9), respectively. As the wavelength for the sound pressure in the frequency range of interest (up to 4 kHz) is much larger than the size of the membrane and the cavity, both the membrane vibration and sound pressure inside the cavity are assumed to be axisymmetric, which means the subscript
m should be 0 in all the above equations.
3. Design and Numerical Modelling
Figure 2 shows an example of the illustrated membrane specimen, where a piece of retro-reflective film (half shown for illustration purpose) had been applied upon a cylindrical enclosed tube (inner diameter = 5.6 mm, depth of the backing cavity = 3 mm) made of 3D printed acrylonitrile butadiene styrene. The commercial retro-reflective film (3M—Scotchlite Sheeting 7610 [
17]) was pre-coated with glass beads and a reflective layer to ensure that the reflected laser illumination can be directed in the same direction as in the inbound path back to the LDV optics. The thickness of the retro-reflective film was about 0.1 mm, with the size of the glass beads about 40
m. The material of the supporting base tube can be either polymeric or metallic, even though polymeric material is preferable in certain applications, such as near a magnetic resonance imaging machine, or in applications requiring the membrane to be lightweight. When the membrane was stretched over the supporting base, it can be either clamped by an outer ring as in conventional condenser microphones [
24], or adhered to the side of the supporting base tube. The latter design was chosen here for simplified construction as shown in
Figure 2.
Table 1 provides the parameters of the membrane specimen with its backing cavity.
Using the parameters in
Table 1, the displacement of the membrane specimen excited by a broadband white noise can be calculated using the analytical solution provided in
Section 2. Three values of the membrane tension
T at 20 N/m, 34 N/m and 90 N/m were investigated with a corresponding damping factor
of 100, 180 and 300, retrospectively, selected. The diameter of the membrane was 5.6 mm in this case. The resulting displacements are compared in
Figure 3a. For
T = 20 N/m, the vibration resonance occurred at about 4.2 kHz. Although the overall level was the highest among the three examples when subject to the same SPL, i.e., 1 Pa, the working frequency range was only below 2 kHz, which cannot meet requirements in many applications. When
T = 90 N/m; however, the resonant frequency occurred at approximately 9 kHz. Although the working frequency range was wider (up to 6 kHz), the overall level was low, indicating a low sensitivity that is not desirable in some situations. When
T = 34 N/m, the resonance occurred at 5.5 kHz, allowing the working frequency range of the demonstrated apparatus to be up to approximately 4 kHz. Meanwhile, the overall level (i.e., the sensitivity) was not significantly reduced. Therefore, it was reasonable to choose the design when the tension of the membrane is 34 N/m with a damping factor of 180.
In addition, the diameter of the membrane
d was considered.
Figure 3b shows three examples when the diameter is 4.0 mm, 5.6 mm and 7.0 mm. The tension and the damping factor remained the same at 34 N/m and 180, respectively. Similar to the case of the membrane tension, when
d = 4.0 mm, the vibration resonance was at 7.8 kHz, but the sensitivity was significantly low. On the other hand, when
d = 7.0 mm, the sensitivity was increased; however, the resonance decreased to 4.3 kHz, leaving a working frequency range below 3 kHz only. When
d = 5.6 mm, the working frequency range was up to 4 kHz with a satisfactory sensitivity compared to other scenarios.
In summary, the membrane tension is an important design factor. Increasing the membrane tension, decreasing the diameter or decreasing the surface density can increase the resonance frequency, thus extending the working frequency range. However, the sensitivity and the dynamic range are reduced correspondingly [
18]. Therefore, for a given microphone design and material, i.e., a fixed diameter and surface density, this retro-reflective membrane should be properly stretched to have a balance between a sufficient sensitivity and a high natural frequency for specified applications.
With the frequency range of the membrane demonstrated hereinafter, the parameters of the retro-reflective membrane were chosen as d = 5.6 mm, T = 34 N/m and = 180 such that the presented remote sensing system can measure various types of sound and noise, including human speech, which is generally below 4 kHz.
4. Experimental Performance Validation
As shown in
Section 2, the displacement of the membrane is proportional to the incident sound pressure, and the output signal from the LDV can be multiplied by the sensitivity, converting the electrical signal from the LDV to the corresponding sound pressure. This is a similar approach to that used for condenser microphones, which use a sensitivity to convert the measured capacitance (converted to voltage) into sound pressure. As the sound pressure at the exact point of the membrane is unknown, a reference microphone (or multiple microphones) can be placed extremely close to the membrane specimen to monitor the sound pressure for calibration.
Figure 4a shows the system configuration for calibration and evaluation. The experimental setup, shown in
Figure 4b, was carried out in a hemi-anechoic chamber. The membrane under test was placed on a metal rod with an adjacent reference microphone (Brüel & Kjær Type 4191) placed a distance of 0.01 m (
) away. The LDV (Polytec NLV-2500-5) was located approximately 1.3 m (
) away with a displacement sensitivity setting of 50 nm/V. The laser beam was maintained at the centre of the membrane throughout the experiments. A loudspeaker (Genelec 8010A) was placed approximately 1.0 m (
) from the microphone. The SPL measured by the reference microphone was 90 dB.
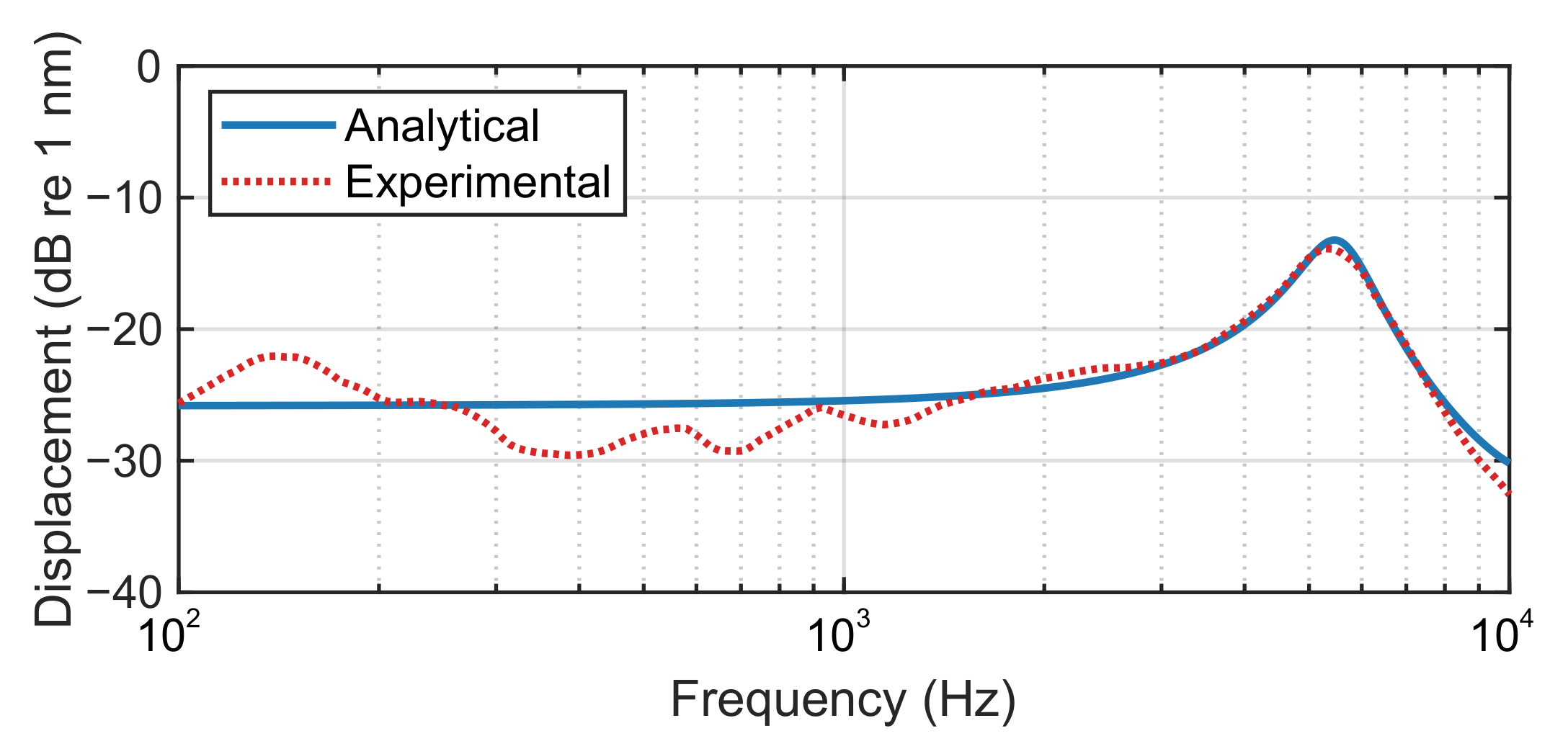
The spectrum of the membrane displacement was obtained initially and compared with the analytical solution in
Section 2 in
Figure 5. It can be seen that the trend of the experimental results generally agrees with the analytical equivalent. There is a little discrepancy in the low frequency range, which might be caused by some minor distortion in the membrane and some minor reflections from the hemi-anechoic chamber. Nonetheless, the analytical model is valid for predicting the behaviour of the membrane.
4.1. Sensitivity
Conventional microphones use capacitance to represent the displacement of the microphone diaphragm, whereas the remote acoustic sensing apparatus uses the LDV to measure the membrane vibration displacement directly. The unit of sensitivity becomes nm/Pa instead of mV/Pa as for conventional microphones. However, the sensitivity of the proposed sensor cannot be made exactly like that of a condenser microphone. The sensitivity can be calculated by comparing the membrane displacement from the LDV to the SPL from the adjacent reference microphone.
Figure 6 shows the both the displacement measurement from the LDV and the SPL measured by the reference microphone and the signals were recorded using the “Steady-State Response (SSR) Analyzer” in the Brüel & Kjær Pulse LabShop software. The sensitivity of the membrane was calculated from the difference between the two as about 6.7 nm/Pa (or 16.6 dB re 1 nm/Pa) for the range of 200 Hz to 4 kHz.
Notice that the previous fluctuations in the displacement measurement is also present in the reference microphone, which can confirm some minor reflections in the testing environment. When the sensitivity was calculated, the fluctuation is reduced to about ±2 dB from 200 Hz to about 4 kHz. However, the magnitude of the sensitivity is still high below 200 Hz, e.g., about 7 dB difference at 100 Hz, even though the displacement measurement from
Figure 5 was in agreement with the analytical result. This may be caused by the sensor head vibration from the LDV, which is more likely excited by low frequency sound. This issue has been extensively studied and solutions can be found in [
25].
4.2. Noise Floor and Limits
The overall background sound pressure level in the hemi-anechoic chamber measured by the reference microphone was approximately 23 dBA to 20
Pa. Meanwhile, the total background noise of the LDV was measured to be about −51 dBA re 1 nm, which was determined by pointing the LDV to the floor of the hemi-anechoic chamber. The background noise of the LDV cannot be simply translated to a sound pressure level using the sensitivity because the membrane displacement may not be proportional at a very low sound pressure level. To investigate this, the sound source with a white noise was decreased from a total value of 90 dB to 50 dB with a step of 10 dB. As shown in
Figure 7a, the decrements were mostly consistent across the spectrum. In addition, three tonal signals at 500 Hz, 1 kHz and 4 kHz were set to various levels from 90 dB to 10 dB to observe the corresponding membrane displacement, which is shown in
Figure 7b. Overall, the membrane displacement is valid only when the SPL is above an overall level of about 60 dB. Below this level, the change in the membrane displacement is not proportional to the one in the SPL. This can also be observed in
Figure 7, where the decrements of the displacement from 20 dB to 10 dB below 300 Hz did not follow the trend. To measure an even lower SPL, a larger membrane can be used, though the effective frequency range may be reduced as discussed in
Section 3. The maximum SPL in these tests was only up to 90 dB due to the rating of the sound source (96 dB maximum). However, the upper limit of the proposed system could be well beyond this, likely above 130 dB.
4.3. Total Harmonic Distortion (THD)
The harmonic distortion is an important property to evaluate a microphone for sound measurements. Because the LDV measures the vibration of the target, the main sources contributing to the distortion are anticipated to be the membrane itself and the supporting base. The total harmonic distortion (THD) at a frequency can be calculated with
where
is the amplitude of the
j-th harmonic. The THD spectrum measured by the reference microphone and the constructed membrane is shown in
Figure 8. As a well-designed and manufactured sensor, the THD of the reference microphone is small overall, which is below 3% above 150 Hz and below 1% above 300 Hz. The custom-made retro-reflective membrane has a similar result, except for some slightly higher THD at a few frequencies below 300 Hz. Above 300 Hz, the THD for the custom-made retro-reflective membrane is also approximately 1%.
7. Conclusions
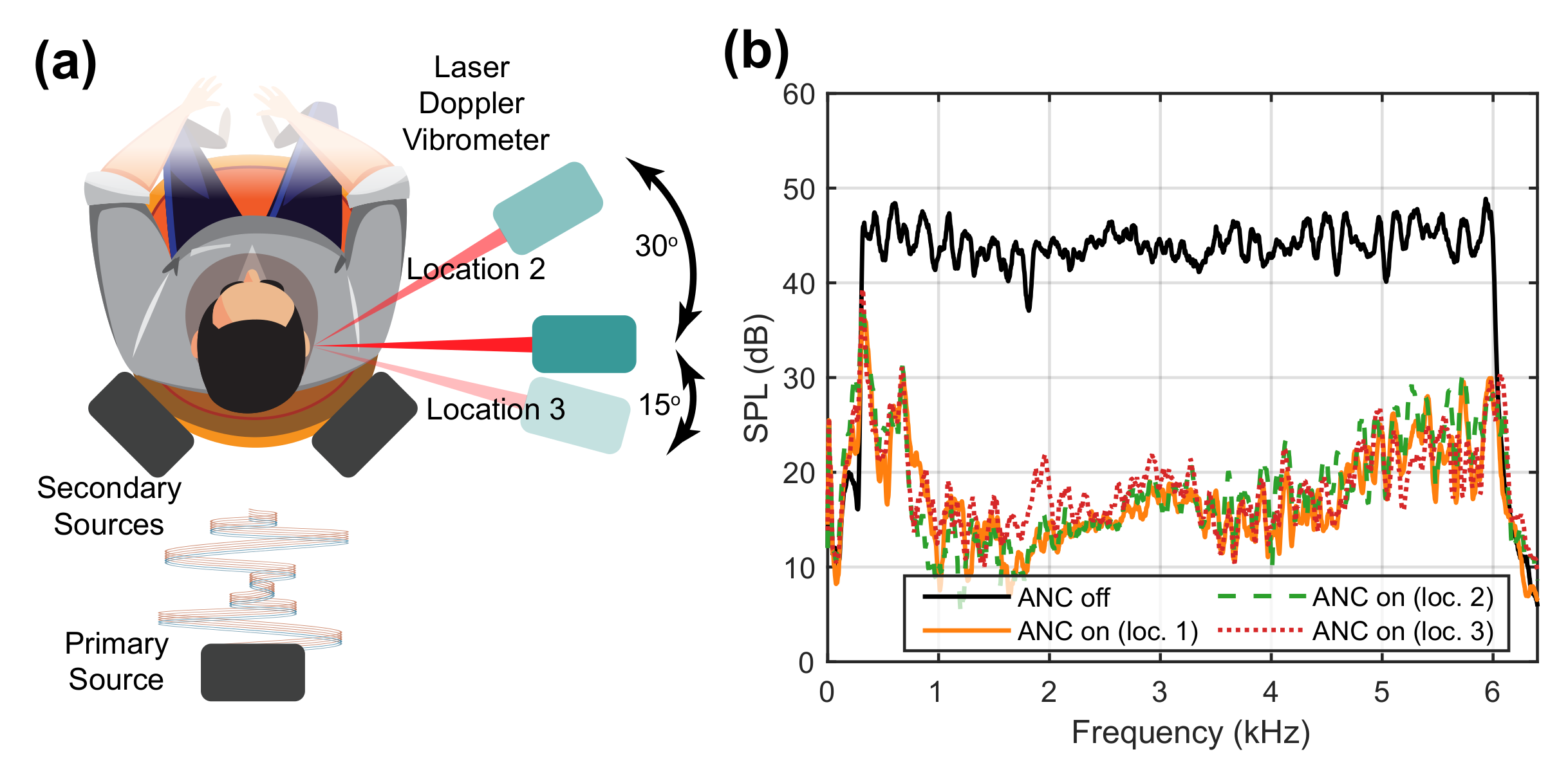
This paper reports a remote acoustic sensing apparatus that consists of a retro-reflective membrane and an LDV at a remote location. This system can measure acoustical pressure signals at remote locations with a minimal instrumentation footprint. The small circular membrane pick-up without any cables can be placed at the location of interest, whereby an LDV can then measure the acoustically induced membrane surface vibration at that remote location. The membrane was purposefully chosen to be retro-reflective to allow a wide range of LDV laser beam incidence angles. The sensitivity of the proposed sensor was calculated, and the noise floor of the LDV and the THD are reported. In addition, some practical issues in applications, such as the exact laser beam incidence location on the membrane, the incidence angle and the signal latency, were addressed. The demonstrated membrane has a working frequency range from 200 Hz to 4 kHz, which is sufficient in some acoustic sensing, speech measuring applications. The initial measurement results indicate that the presented acoustic sensing apparatus has potential in applications when traditional microphones cannot be installed, such as in an ANC headrest. In this case, the frequency range of the controlled noise was from 300 Hz to 6 kHz. The sound pressure reduction level was over 20 dB.
However, it should be noted that there are some factors potentially limiting the functionality of the proposed system. First, although the system allows for remote and wireless acoustic measurements, small membranes are still required as the acoustic pick-ups. Second, since the measurements are made from the LDVs placed at a remote location, the paths for the laser beams must be cleared and thus the placement of these devices can be limited. One possible solution can be to include one or multiple small galvanometer-driven beam-steering mirrors to redirect the laser beams depending on a specific application. Last, the laser beams from LDVs might be disturbing or hazardous particularly when human users are involved. Although eye-safe, such a system should be designed such that these hazards shall be minimised.
Future work will include designing the membrane to yield a solution with a wider frequency range. For example, using a thinner material (e.g., graphene) treated to be retro-reflective can possibly be used to both broaden the frequency range and improve the sensitivity.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}