
Wireless Torque and Power Transfer Using Multiple Coils with LCC-S Topology for Implantable Medical Drug Pump

 , , , , , , and
, , , , , , and
Abstract
:1. Introduction
2. Analysis of WTT and WPT for Implantable Medical Device
2.1. Proposed WTT and WPT System
2.2. Methodology of Wireless Torque Transfer

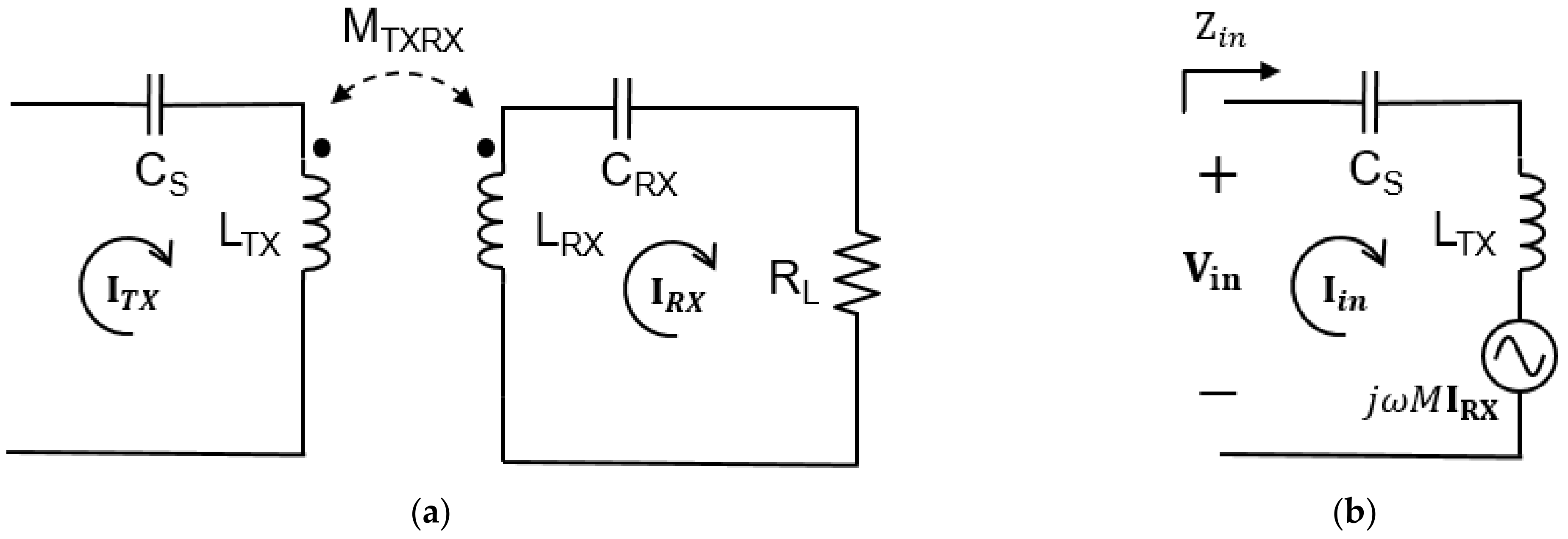
2.3. Method of Wireless Power Transfer
2.4. Method of Receiving Coil Detection
3. Simulation
3.1. Simulation Setup
3.2. Simulation Result
4. Experiments
4.1. Experiment Setup
4.2. Experiment Result
5. EMF Safety
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, Z.; Pang, H.; Georgiadis, A.; Cecati, C. Wireless power transfer—An overview. IEEE Trans. Ind. Electron. 2018, 66, 1044–1058. [Google Scholar] [CrossRef]
- Arai, H. Wireless power transfer system. J. Electromagn. Eng. Sci. 2011, 11, 143–151. [Google Scholar] [CrossRef]
- Ahn, S.Y.; Chun, Y.B.; Cho, D.H.; Kim, J.H. Wireless power transfer technology in on-line electric vehicle. J. Electromagn. Eng. Sci. 2011, 11, 174–182. [Google Scholar] [CrossRef]
- La Rosa, R.; Livreri, P.; Trigona, C.; Di Donato, L.; Sorbello, G. Strategies and techniques for powering wireless sensor nodes through energy harvesting and wireless power transfer. Sensors 2019, 19, 2660. [Google Scholar] [CrossRef] [Green Version]
- Haerinia, M.; Noghanian, S. A printed wearable dual-band antenna for wireless power transfer. Sensors 2019, 19, 1732. [Google Scholar] [CrossRef] [Green Version]
- Khan, S.R.; Pavuluri, S.K.; Cummins, G.; Desmulliez, M.P. Wireless power transfer techniques for implantable medical devices: A review. Sensors 2020, 20, 3487. [Google Scholar] [CrossRef] [PubMed]
- Campi, T.; Cruciani, S.; Palandrani, F.; De Santis, V.; Hirata, A.; Feliziani, M. Wireless power transfer charging system for AIMDs and pacemakers. IEEE Trans. Microw. Theory Tech. 2016, 64, 633–642. [Google Scholar] [CrossRef]
- Kim, D.; Jeong, D.; Kim, J.; Kim, H.; Kim, J.; Park, S.M.; Ahn, S. Design and implementation of a wireless charging-based cardiac monitoring system focused on temperature reduction and robust power transfer efficiency. Energies 2020, 13, 1008. [Google Scholar] [CrossRef] [Green Version]
- Kumar, A.; Pillai, J. Implantable drug delivery systems: An overview. Nanostruct. Eng. Cells Tissues Organs 2018, 473–511. [Google Scholar] [CrossRef]
- White, F.M. Fluid Mechanics, 4th ed.; McGraw-Hill: New York, NY, USA, 1998; pp. 770–790. [Google Scholar]
- Tang, S.C.; Lun, T.L.T.; Guo, Z.; Kwok, K.W.; McDannold, N.J. Intermediate range wireless power transfer with segmented coil transmitters for implantable heart pumps. IEEE Trans. Power Electron. 2016, 32, 3844–3857. [Google Scholar] [CrossRef]
- Kim, D.; Hwang, K.; Park, J.; Park, H.H.; Ahn, S. Miniaturization of implantable micro-robot propulsion using a wireless power transfer system. Micromachines 2017, 8, 269. [Google Scholar] [CrossRef] [PubMed]
- Bhatia, G.; Lau, M.E.; Koury, K.M.; Gulur, P. Intrathecal Drug Delivery (ITDD) systems for cancer pain. F1000Research 2013, 2, 96. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Mai, R.; Liu, D.; Li, Y.; He, Z. Efficiency optimization for wireless dynamic charging system with overlapped DD coil arrays. IEEE Trans. Power Electron. 2017, 33, 2832–2846. [Google Scholar] [CrossRef]
- Kim, D.; Park, J.; Park, B.; Shin, Y.; Kim, K.; Park, H.H.; Ahn, S. Propulsion and Rotation of Microrobot Based on a Force on a Magnetic Material in a Time-Varying Magnetic Field Using a Wireless Power Transfer System. IEEE Trans. Magn. 2019, 56, 1–5. [Google Scholar] [CrossRef]
- Cheng, D.K. Fundamentals of Engineering Electromagnetics, 1st ed.; Pearson: London, UK, 1992; pp. 185–223. [Google Scholar]
- Rhee, J.; Shin, Y.; Kim, H.; Kim, J.; Lee, C.; Huh, S.; Woo, S.; Son, S.; Ahn, S. Wireless Torque Transfer using Rotating Magnetic Field with Multiple Coils. In Proceedings of the 2021 IEEE Wireless Power Transfer Conference (WPTC), San Diego, CA, USA, 1–4 June 2021; pp. 1–3. [Google Scholar] [CrossRef]
- Wang, C.S.; Covic, G.A.; Stielau, O.H. Power transfer capability and bifurcation phenomena of loosely coupled inductive power transfer systems. IEEE Trans. Ind. Electron. 2004, 51, 148–157. [Google Scholar] [CrossRef]
- Zhang, W.; Mi, C.C. Compensation topologies of high-power wireless power transfer systems. IEEE Trans. Veh. Technol. 2015, 65, 4768–4778. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, H.; Shin, C.S.; Seo, K.H.; Park, S.J.; Kim, D.H. A comparative study of SS and LCC-S compensation topology of inductive power transfer systems for EV chargers. In Proceedings of the 2019 IEEE 10th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Xi’an, China, 3–6 June 2019; pp. 99–104. [Google Scholar]
- Kim, D.H.; Ahn, D. Maximum efficiency point tracking for multiple-transmitter wireless power transfer. IEEE Trans. Power Electron. 2019, 35, 11391–11400. [Google Scholar] [CrossRef]
- ETSI EN 302 195-2, V1.1.1. Radio Equipment in the Frequency Rage 9 kHz to 316 kHz for Ultra Low Power Active Medical Implants and Accessories. Available online: https://www.etsi.org/deliver/etsi_en/302100_302199/30219502/01.01.01_60/en_30219502.V010101p.pdf (accessed on 20 October 2021).
- Kim, J.; Kim, H.; Kim, D.; Park, J.; Park, B.; Huh, S.; Ahn, S. Analysis of Eddy Current Loss for Wireless Power Transfer in Conductive Medium Using Z-Parameters Method. In Proceedings of the IEEE Wireless Power Transfer Conference (WPTC), Seoul, Korea, 15–19 November 2020; pp. 432–434. [Google Scholar] [CrossRef]
- Kim, J.; Kim, K.; Kim, H.; Kim, D.; Park, J.; Ahn, S. An efficient modeling for underwater wireless power transfer using z-parameters. IEEE Trans. Electromagn. Compat. 2019, 61, 2006–2014. [Google Scholar] [CrossRef]
- Ahn, D. Transmitter coil resonant frequency selection for wireless power transfer. IEEE Trans. Power Electron. 2017, 33, 5029–5041. [Google Scholar] [CrossRef]
- Blevins, R.D. Applied Fluid Dynamics Handbook; Krieger Publishing Company: New York, NY, USA, 1984; pp. 330–439. [Google Scholar]
- ICNIRP. Guidelines for limiting exposure to time-varying electric, magnetic and electromagnetic fields (up to 300 GHZ). Health Phys. 1998, 74, 494–522. [Google Scholar]
- ICNIRP. Guidelines for limiting exposure to electromagnetic fields (100 kHz to 300 GHZ). Health Phys. 2020, 118, 483–524. [Google Scholar] [CrossRef] [PubMed]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Parameters | Symbol |
|---|---|---|---|
| DC input voltage | Resistance of TX coil | ||
| Inverter output voltage | Resistance of RX coil | ||
| Load resistance voltage | Series inductance | ||
| Current flowing in | Inductance of TX coil | ||
| Current flowing in | Inductance of RX coil | ||
| Current flowing in | Parallel capacitance | ||
| Current flowing in | Series capacitance | ||
| Current flowing in | Matching capacitance of RX coil | ||
| Load resistance | Mutual inductance between TX coil and RX coil |
| Size | Width [mm] | Length [mm] | Height [mm] |
|---|---|---|---|
| TX coils | - | - | 2.28 |
| RX coil | 20 | 71.5 | 4.6 |
| Ferrite (TX) | 200 | 200 | 4 |
| Ferrite (RX) | 17.2 | 71.5 | 1.8 |
| Air gap | - | - | 20 |
| Conductivity [s/m] | ||||
|---|---|---|---|---|
| Air | 0 | 52.597 | 27.959 | 4.805 |
| Water | 0.01 | 52.597 | 27.959 | 4.804 |
| Tissue | Muscle 0.367 Fat 0.0434 Skin 0.00057 | 52.603 | 27.957 | 4.802 |
| [deg] | 0 | 30 | 60 | ||||
|---|---|---|---|---|---|---|---|
| k | 0.042 | 0.094 | 0.042 | 0.1 | 0.05 | 0.11 | 0.042 |
| PTE [%] | 24.5 | 63.1 | 23.3 | 66.4 | 30.3 | 68.4 | 24.5 |
| PTE [%] | [uNm] | |||||
|---|---|---|---|---|---|---|
| 10 | 9.3 | 2.52 | 26.9 | 5.6 | 0.56 | 6.425 |
| 20 | 8.6 | 2.12 | 24.5 | 5.6 | 0.33 | 6.424 |
| 50 | 7 | 0.75 | 10.7 | 5.6 | 0.15 | 6.431 |
| Coil | Type | Number of Turns | Inductance [uH] | |||||
|---|---|---|---|---|---|---|---|---|
| TX coil 1 (Yellow) | Litz wire (2.28 mm) | 28 | 52.9 | 11.3 | 37 | 143 | - | 170 |
| TX coil 2 (Green) | 47.9 | 41 | 140 | |||||
| TX coil 3 (Blue) | 42.6 | 49 | 120 | |||||
| RX coil (Red) | Litz wire (1.3 mm) | 47 | 30.3 | - | - | - | 54 | 160 |
| [deg] | 0 | 30 | 60 | ||||
|---|---|---|---|---|---|---|---|
| 470 | 422 | 280 | 170 | 222 | 409 | 460 | |
| 170 | 450 | 457 | 280 | 140 | 140 | 188 | |
| 250 | 116 | 120 | 300 | 453 | 350 | 220 |
| [deg] | 0 | 30 | 60 | |||
|---|---|---|---|---|---|---|
| [rad/s] | 0.0748 | 0.0873 | 0.0722 | 0.0748 | 0.0776 | 0.0911 |
| [cm/s] | 0.262 | 0.306 | 0.253 | 0.268 | 0.272 | 0.282 |
| Frequency [kHz] | Local SAR [W/kg] | Max SAR [W/kg] | |
|---|---|---|---|
| ICNIRP 2020 | Proposed model | 0.0468 | |
| 2 | 0.0086 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rhee, J.; Shin, Y.; Woo, S.; Lee, C.; Kim, D.; Ahn, J.; Kim, H.; Ahn, S. Wireless Torque and Power Transfer Using Multiple Coils with LCC-S Topology for Implantable Medical Drug Pump. Sensors 2021, 21, 8150. https://doi.org/10.3390/s21238150
Rhee J, Shin Y, Woo S, Lee C, Kim D, Ahn J, Kim H, Ahn S. Wireless Torque and Power Transfer Using Multiple Coils with LCC-S Topology for Implantable Medical Drug Pump. Sensors. 2021; 21(23):8150. https://doi.org/10.3390/s21238150
Chicago/Turabian StyleRhee, Jaewon, Yujun Shin, Seongho Woo, Changmin Lee, Dongwook Kim, Jangyong Ahn, Haerim Kim, and Seungyoung Ahn. 2021. "Wireless Torque and Power Transfer Using Multiple Coils with LCC-S Topology for Implantable Medical Drug Pump" Sensors 21, no. 23: 8150. https://doi.org/10.3390/s21238150