
Improving the Ability of a Laser Ultrasonic Wave-Based Detection of Damage on the Curved Surface of a Pipe Using a Deep Learning Technique


Abstract
:1. Introduction
2. Ultrasonic Wave Generation Mechanism Using Pulsed Laser
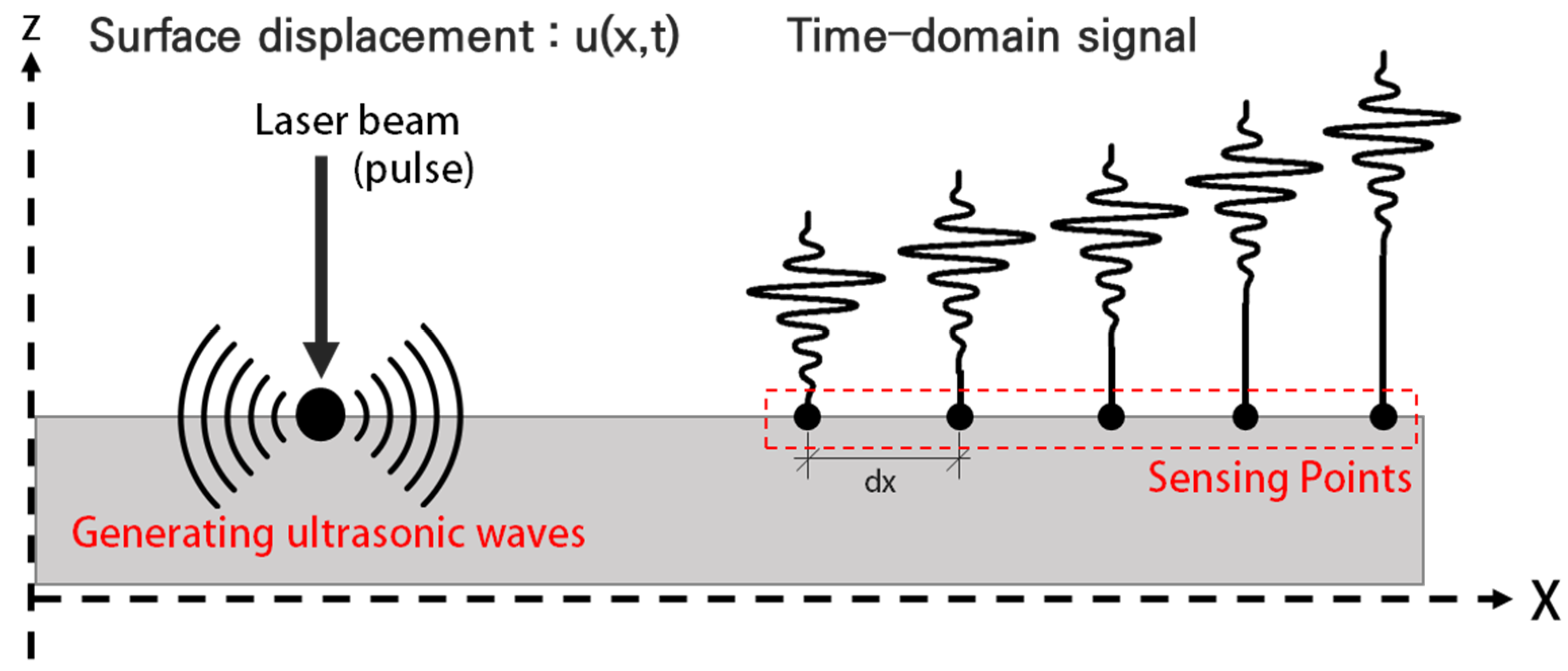
2.1. Ultrasonic Wave Mode Generation Theory
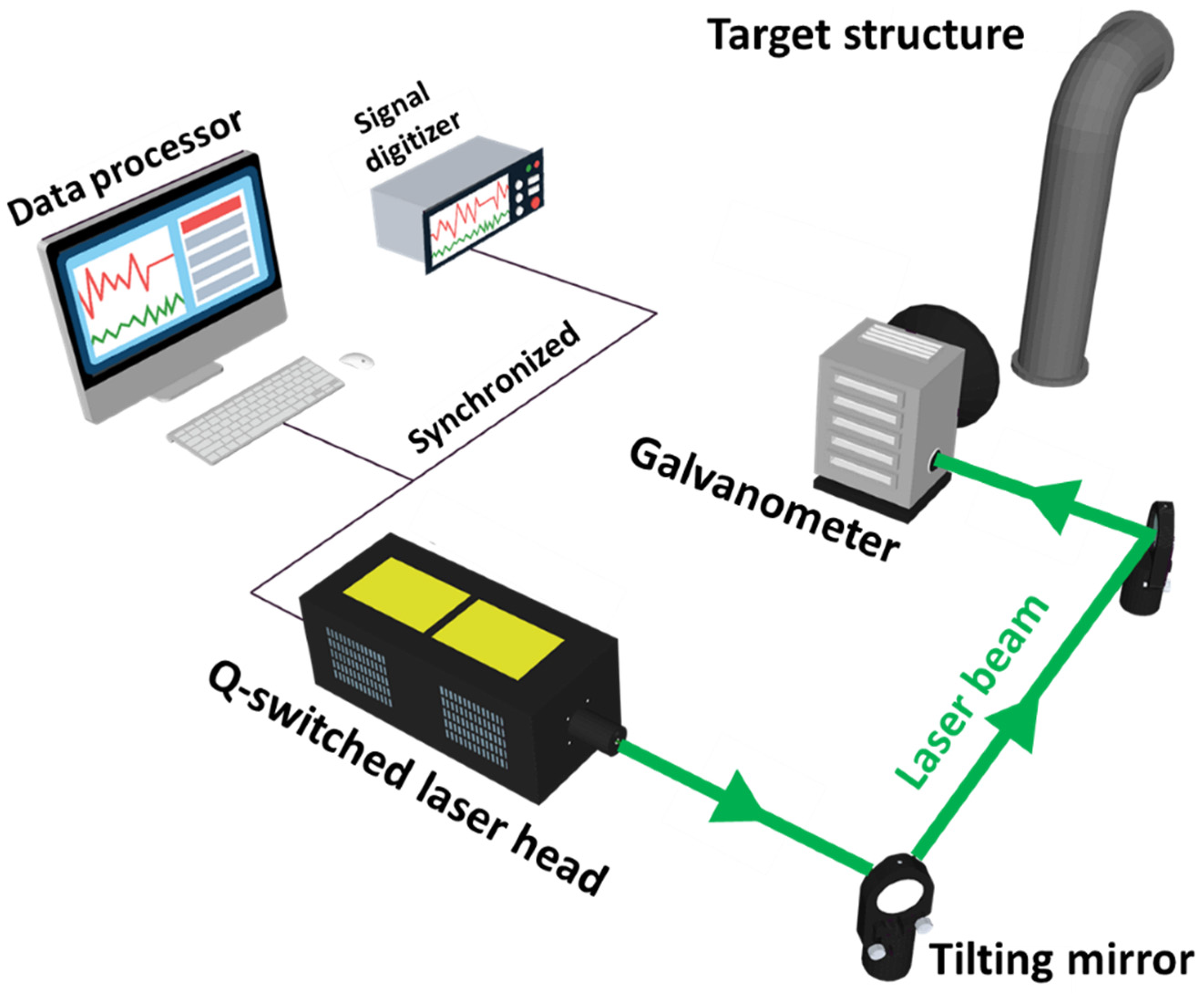
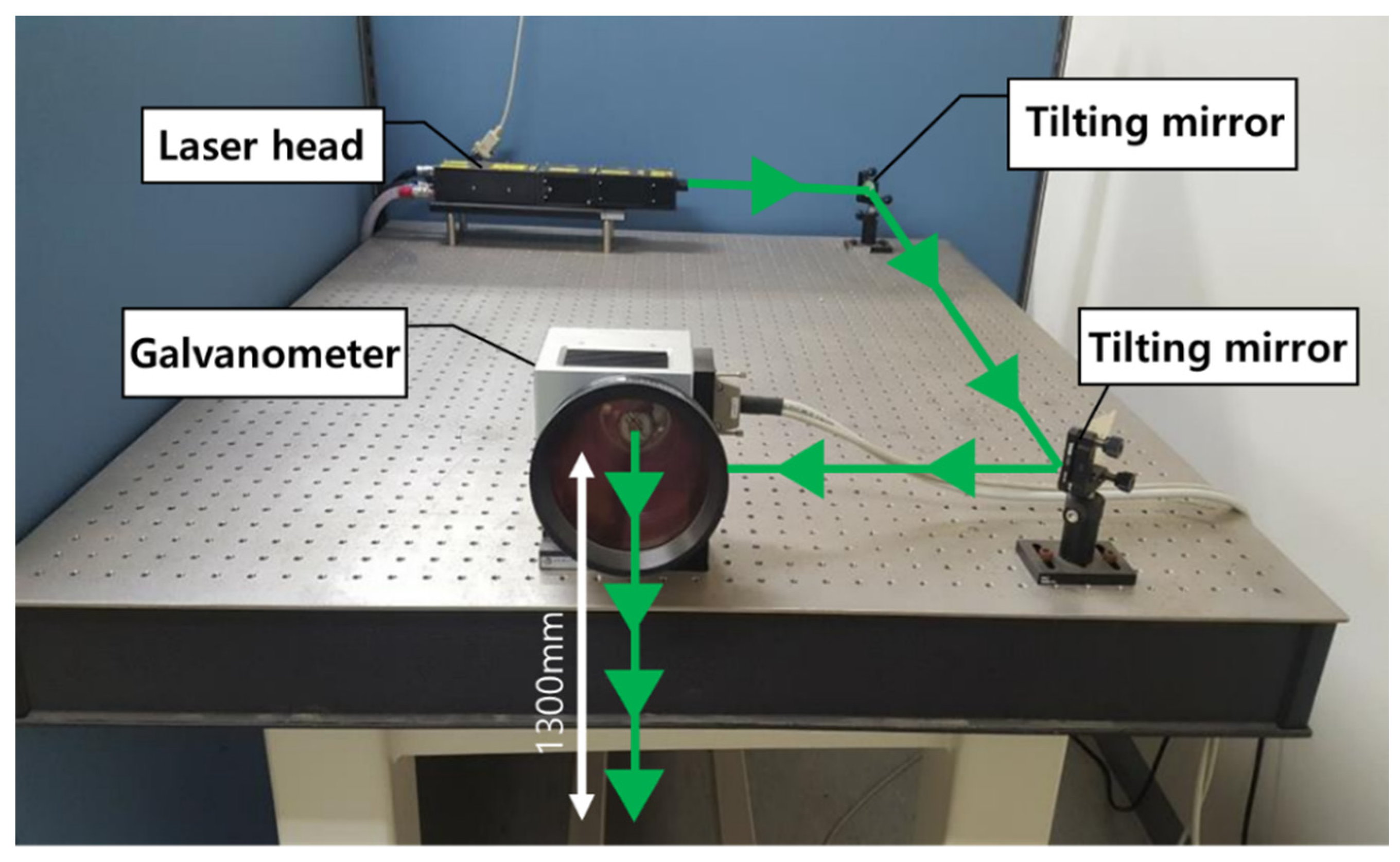
2.2. Ultrasonic Wave Propagation Imaging System Configuration
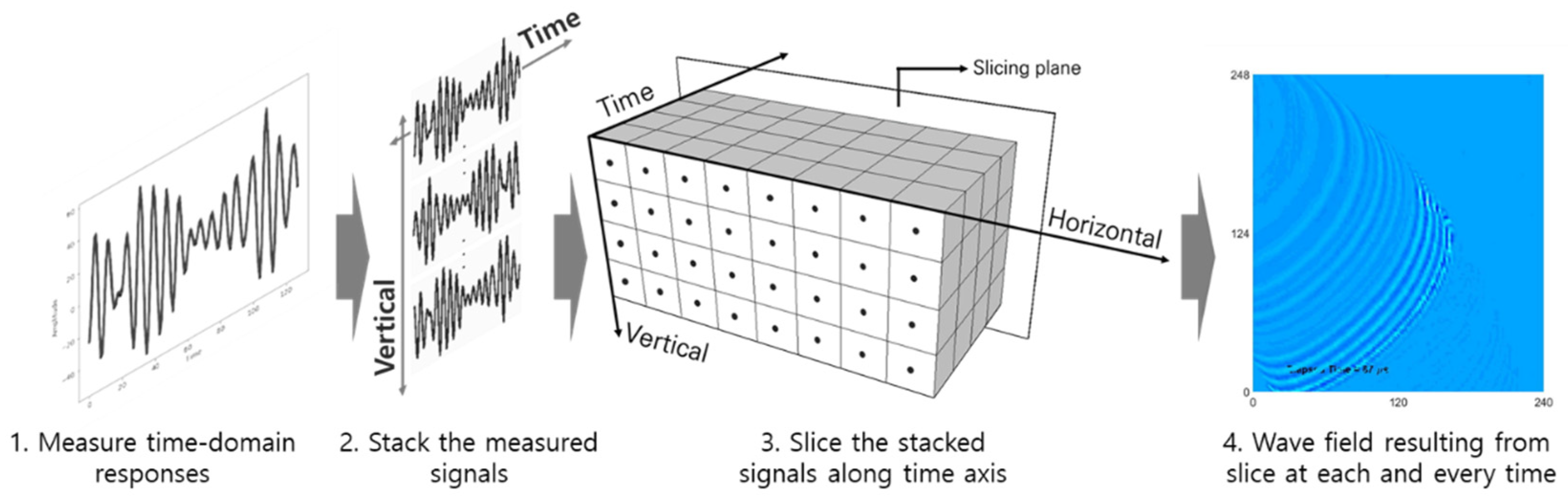
2.3. Ultrasonic Wave Propagation Imaging Algorithm
3. Deep Learning-CNN
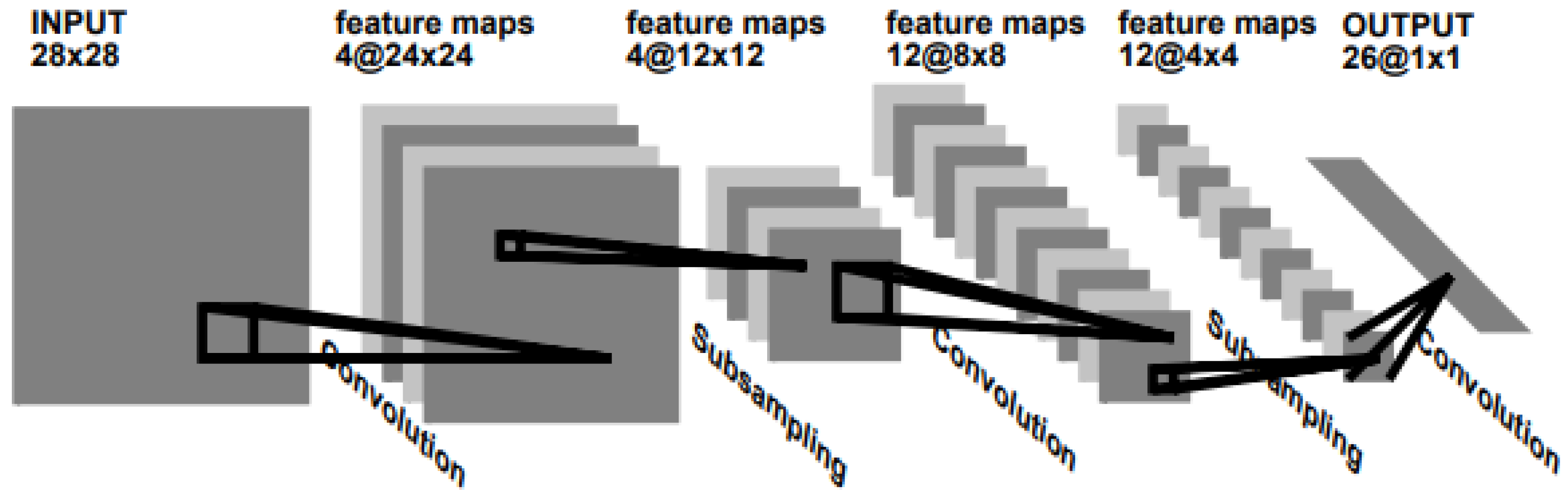
3.1. CNN
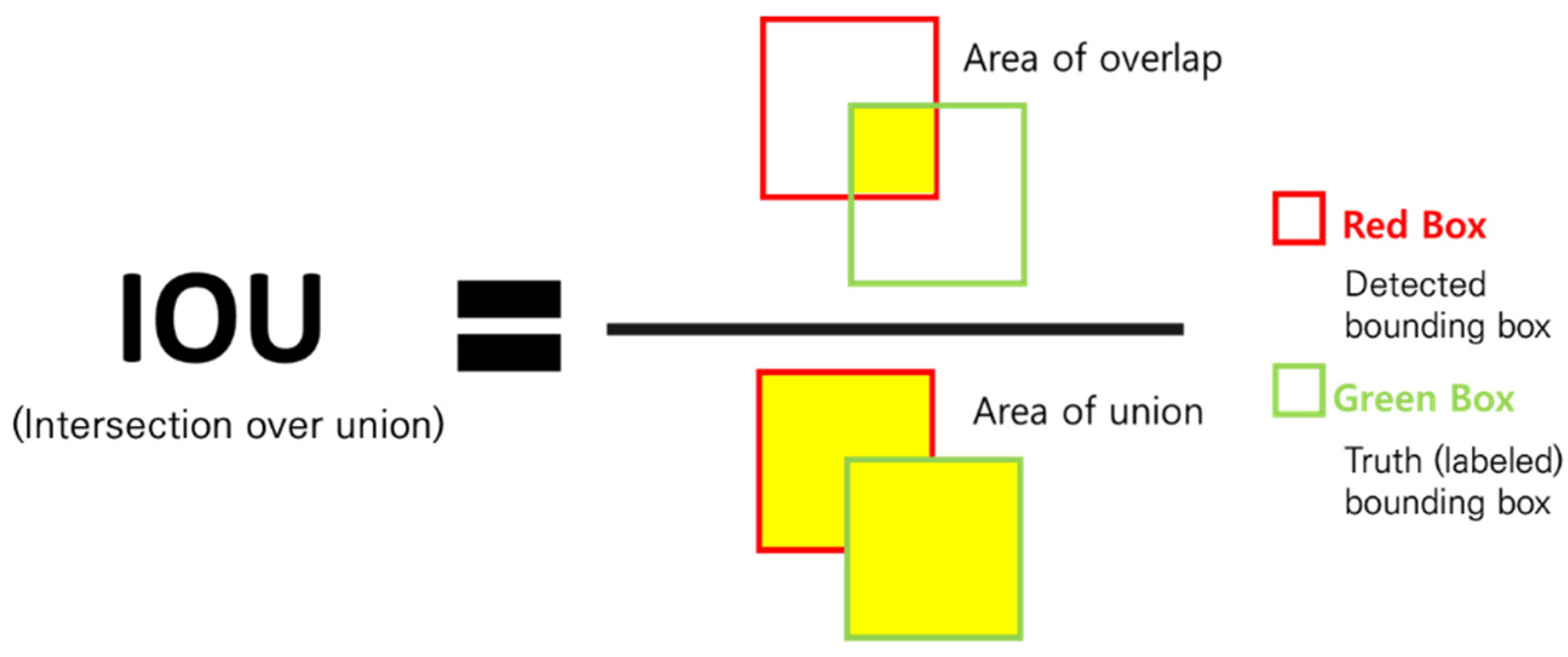
3.2. Object Detection
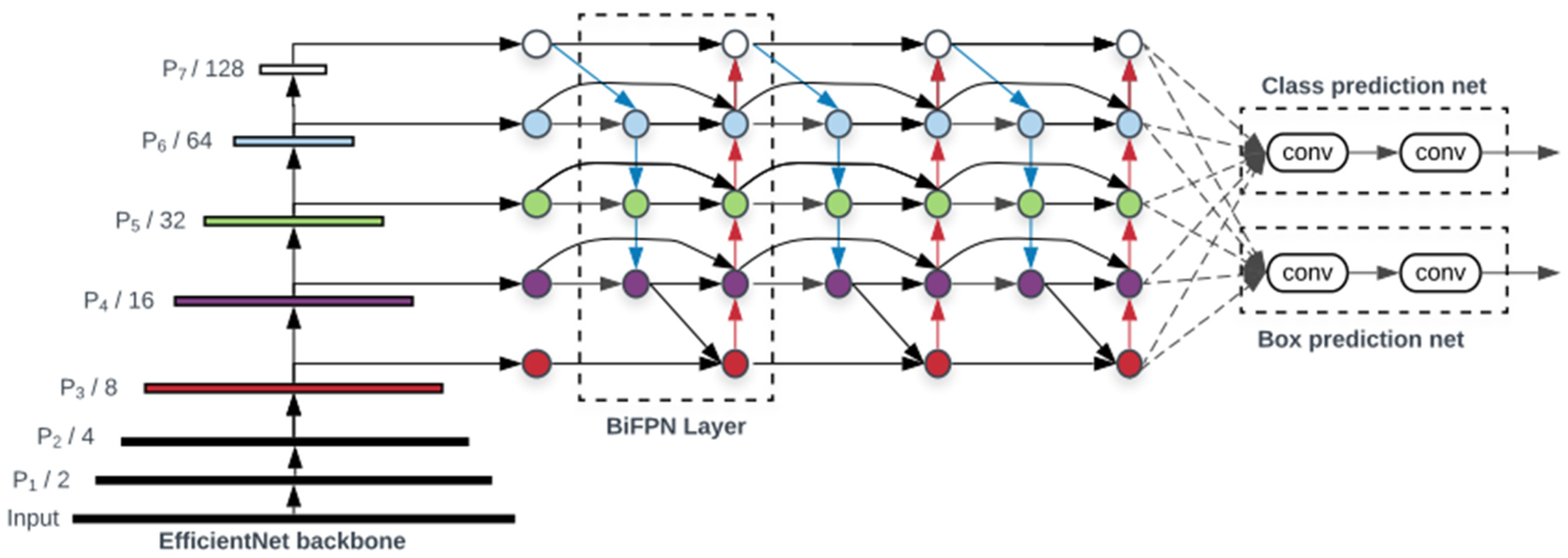
3.3. EfficientDet
4. UWPI-System-Based Pipe Damage Detection Experiment and CNN Learning
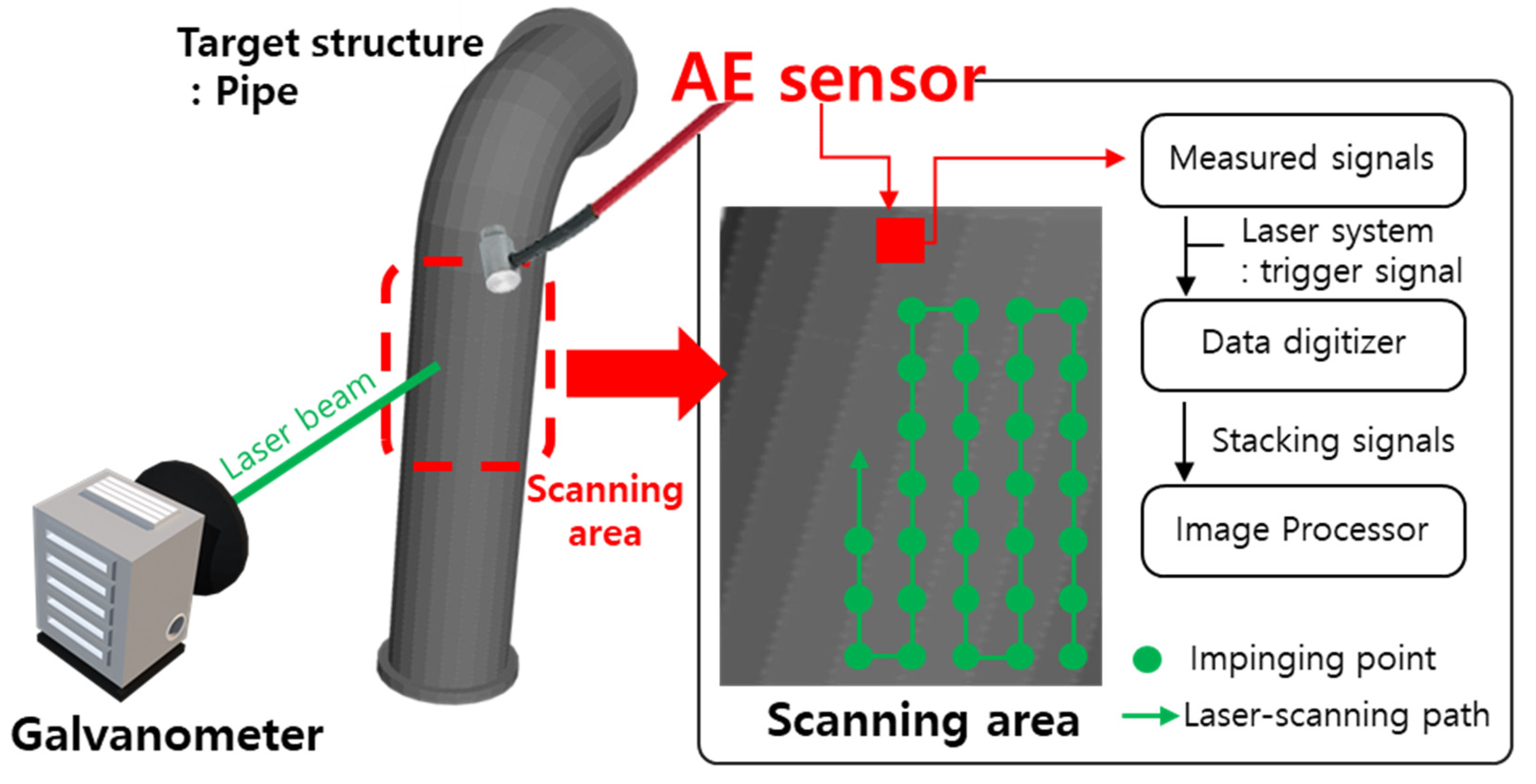
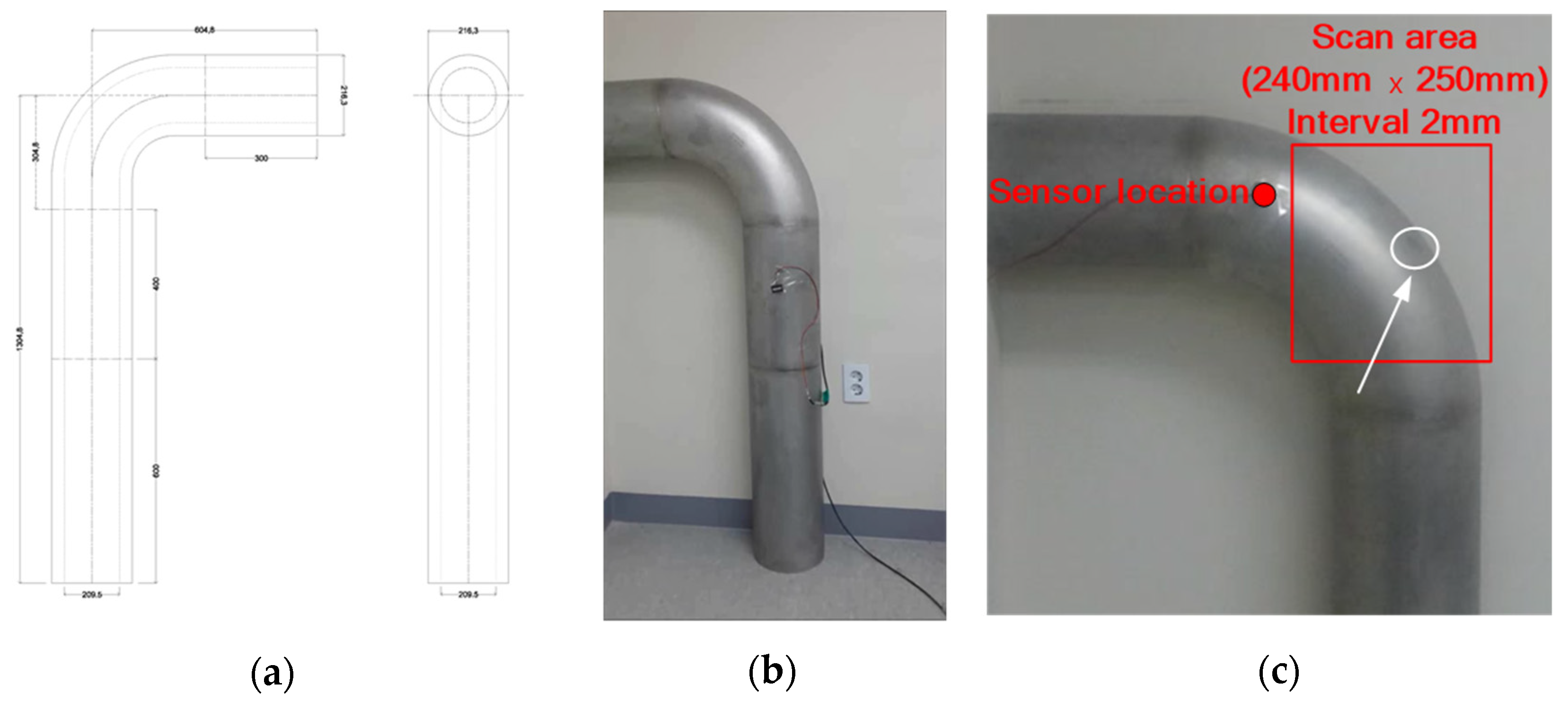
4.1. Detecting External Damage to Pipe Bends Using UWPI System
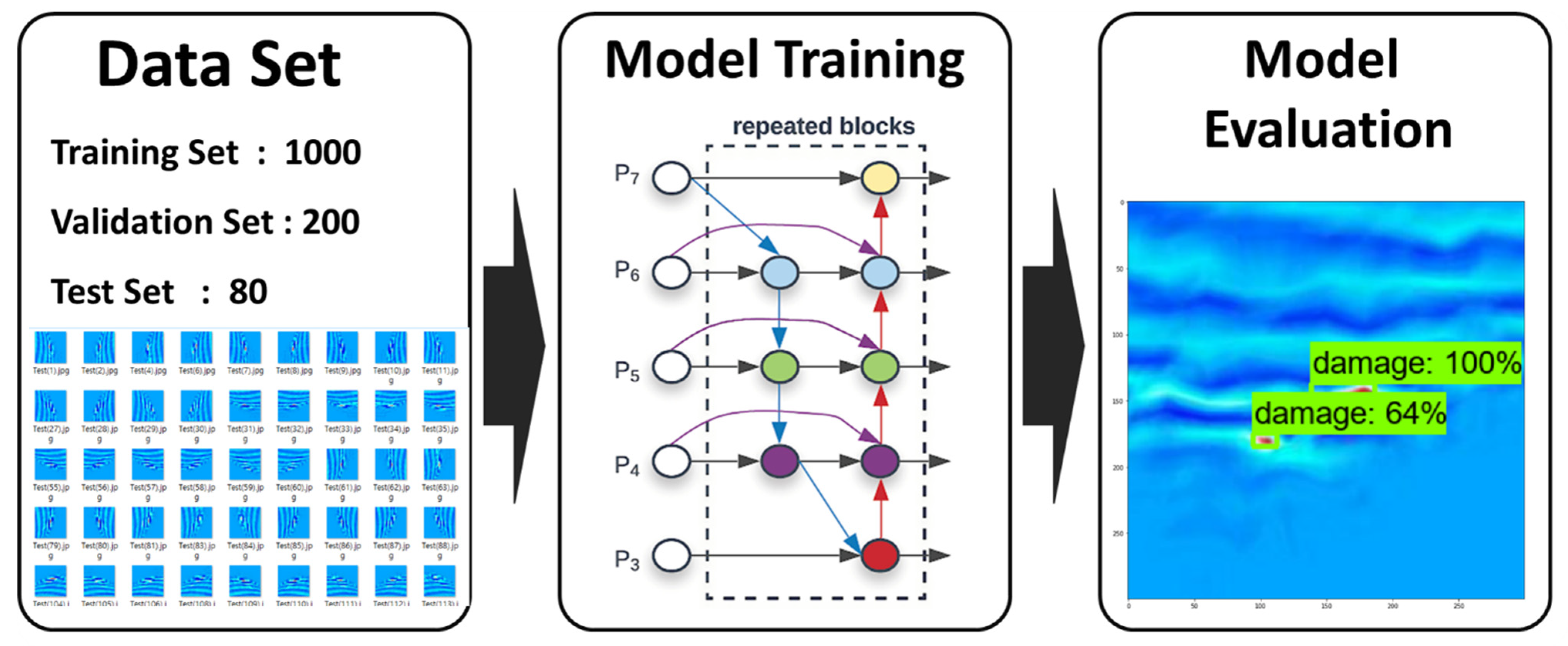
4.2. CNN Learning Using Damage Data
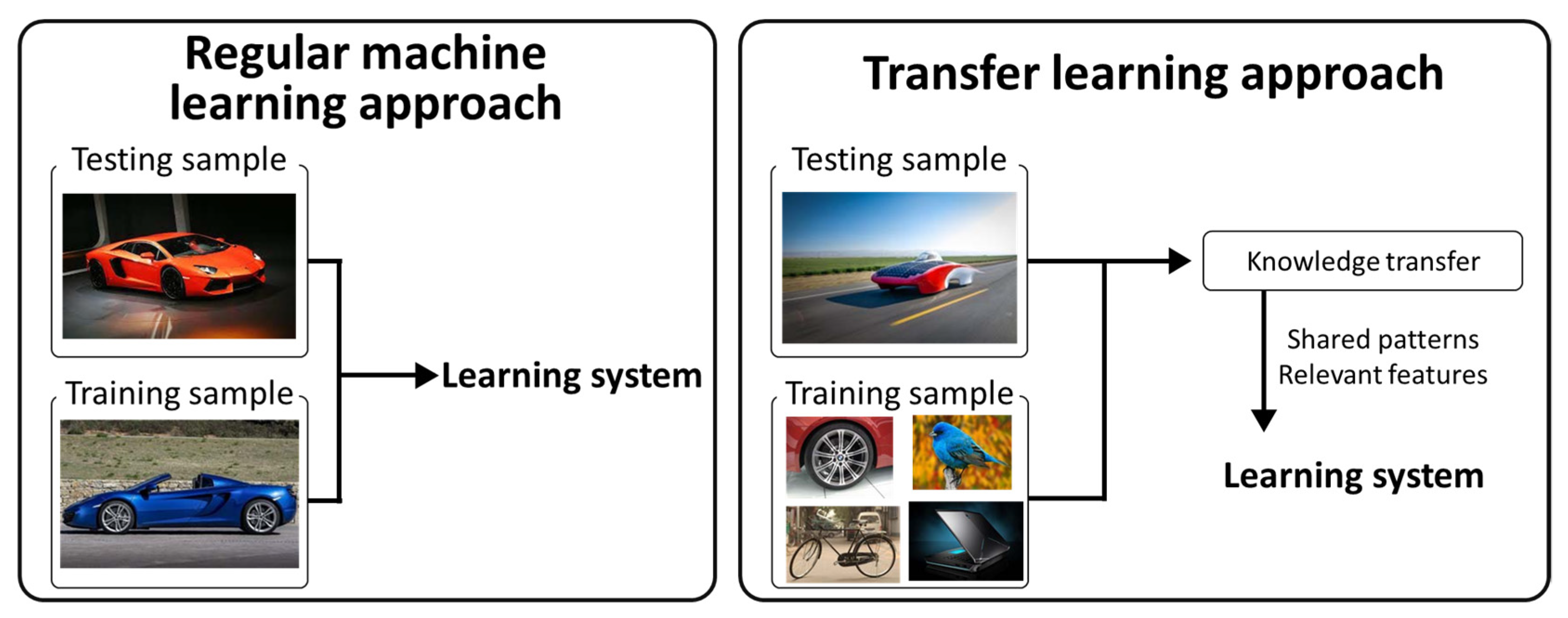
4.2.1. Transfer Learning
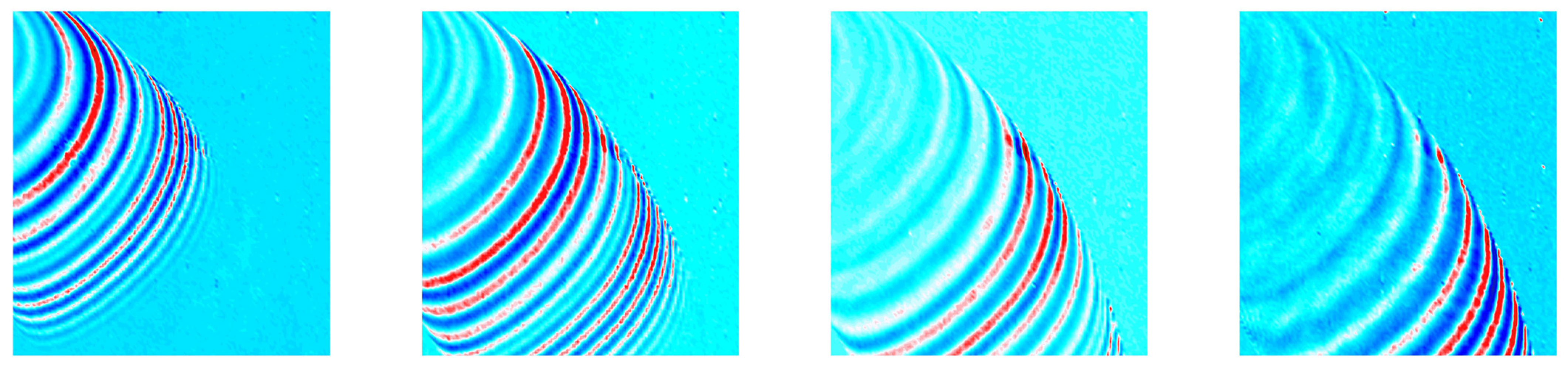
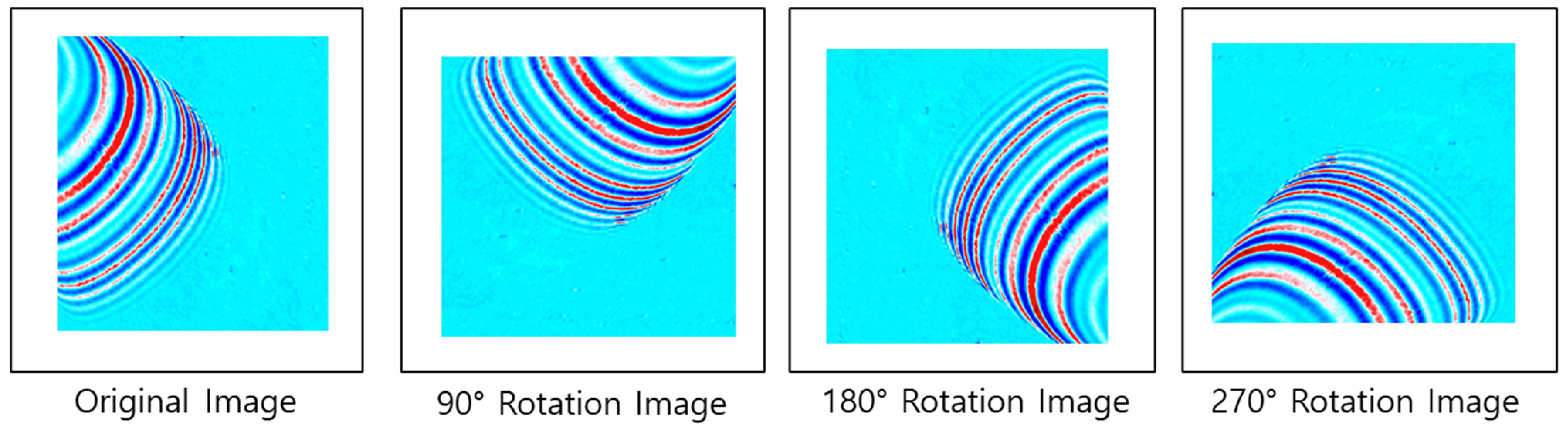
4.2.2. Train Dataset
4.2.3. Training Dataset
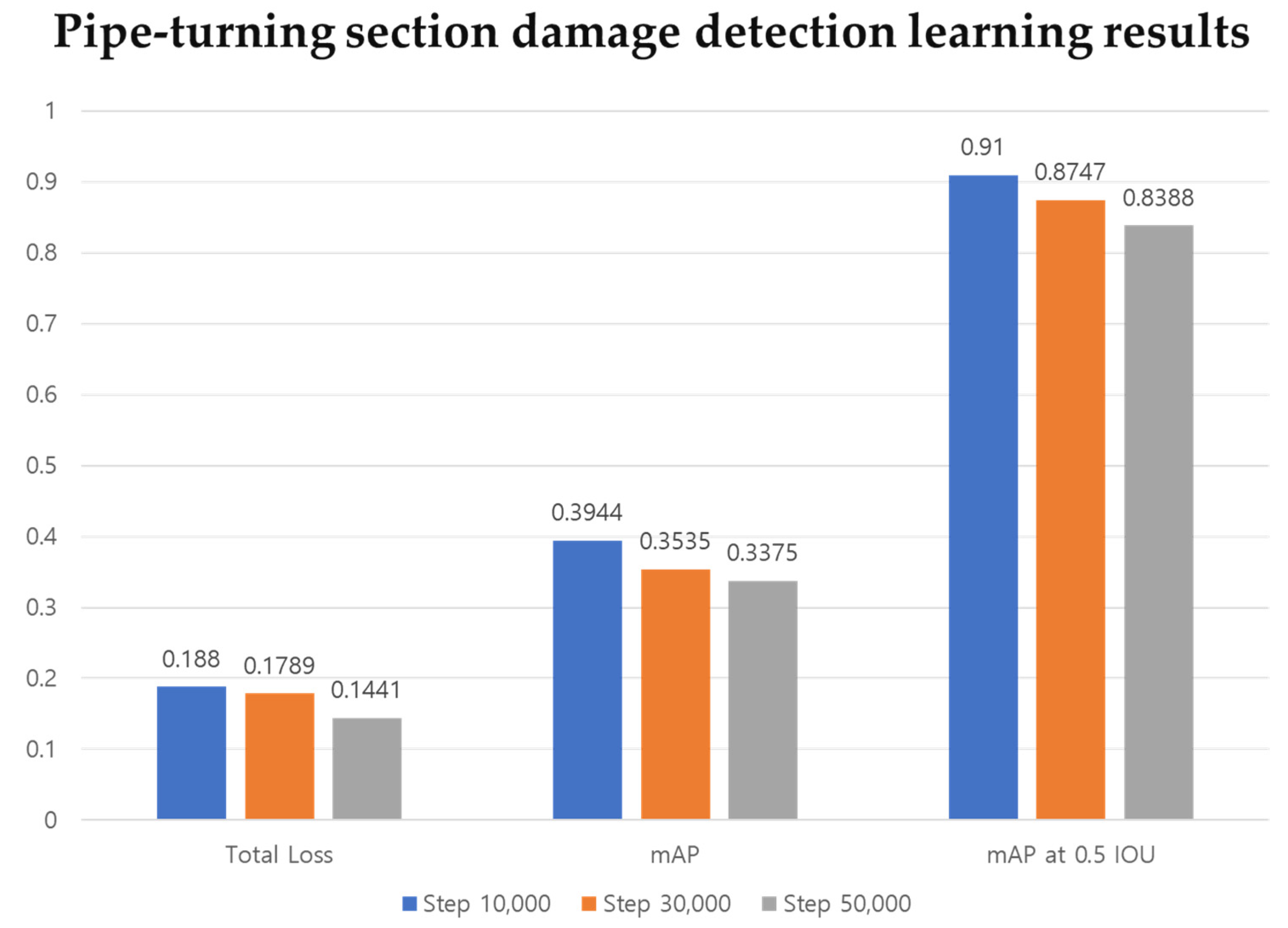
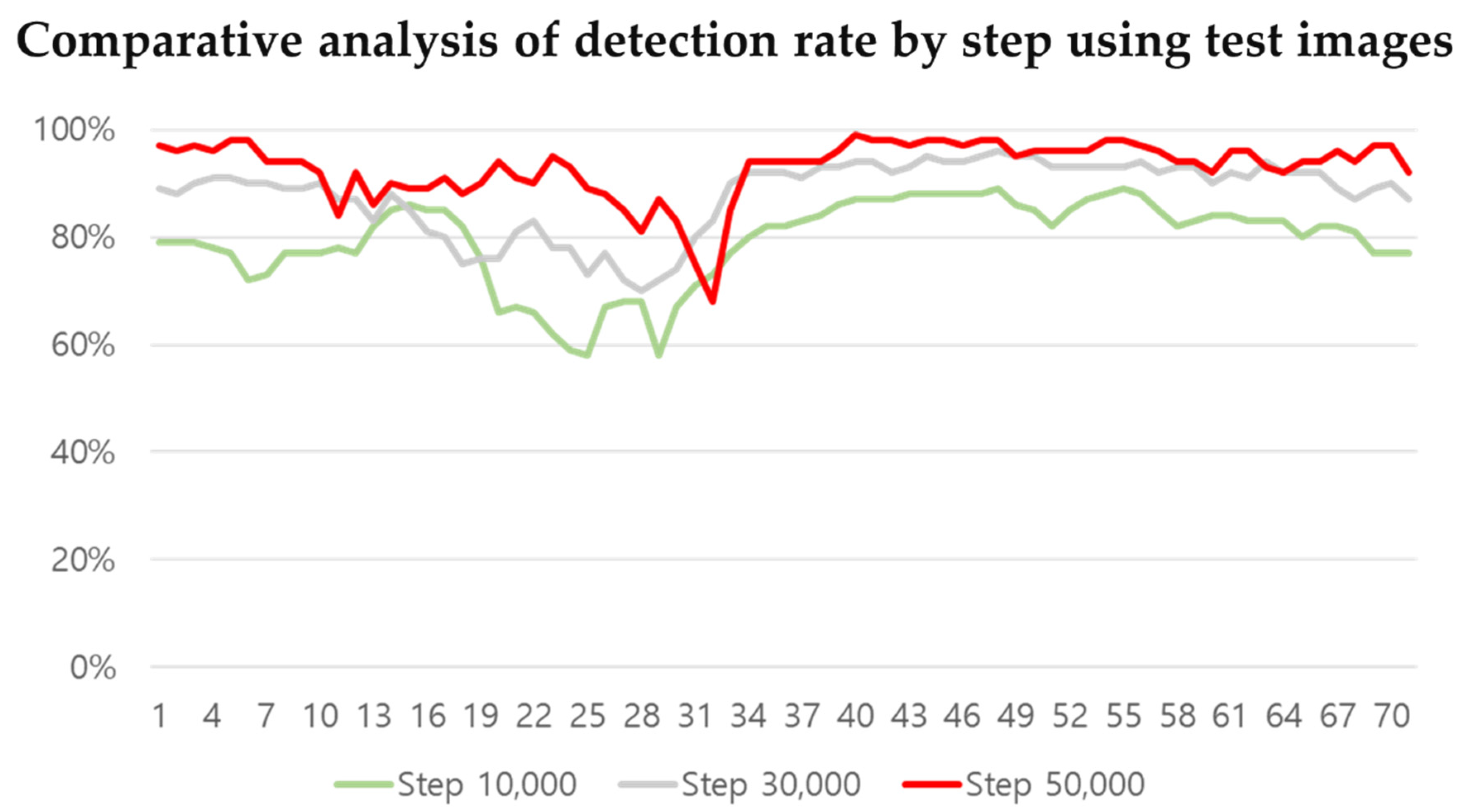
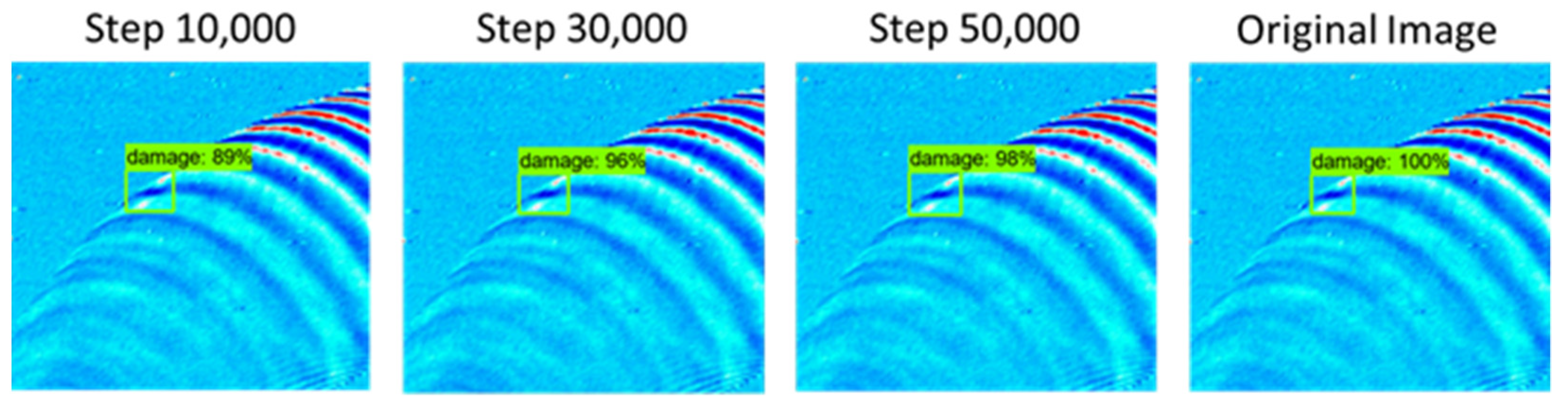
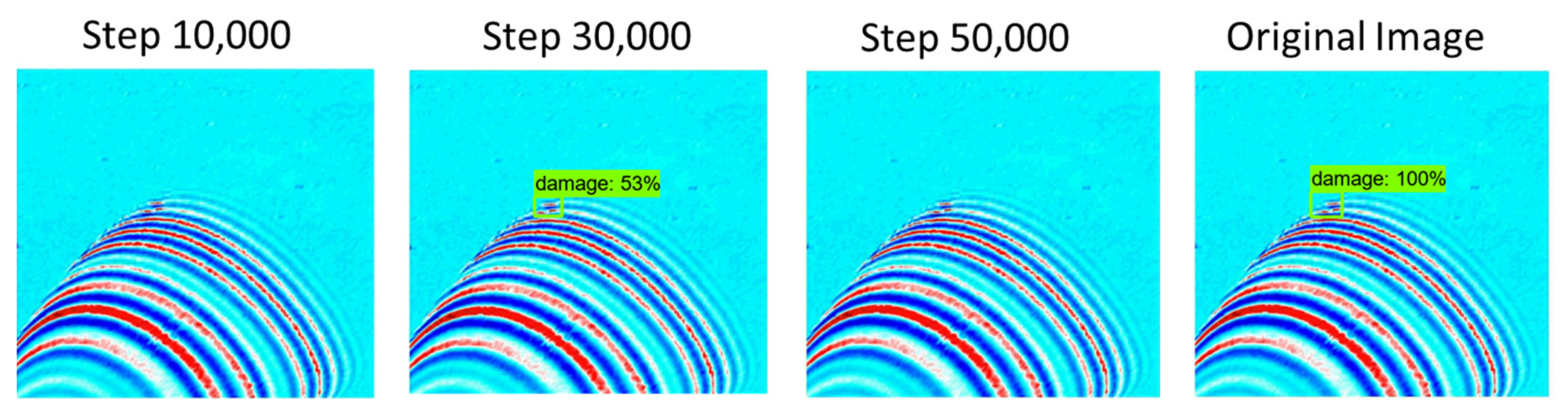
4.2.4. UWPI Data Deep Learning Result
5. Conclusions
- Through additional experiments and research, we intend to secure UWPI data according to the damage size using laser scanning techniques for the components (curved part, curved pipe part, bolted joint part, welding, etc.) of pipes.
- This study confirmed the possibility of detecting damage to pipes based on laser scanning through the transfer learning technique, and based on this, we intend to propose a better detection technique using new algorithms and large amounts of data.
- To acquire ultrasonic signals in the laser scanning system, this study used the AE sensor installed directly on the pipe. Therefore, we intend to develop a noncontact nondestructive system for efficient pipe damage detection by using laser diameter vibration (LDV) instead of an AE sensor.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Gunarathna, R.N.P.; Sivahar, V. Challenges in Monitoring Metallic Pipeline Corrosion Using Ultrasonic Waves—A Review Article. Eng. J. Inst. Eng. 2021, 54, 67–75. [Google Scholar]
- Lee, C.; Kang, D.; Park, S. Visualization of Fatigue Cracks at Structural Members Using a Pulsed Laser Scanning System. Res. Nondestruct. Eval. 2014, 26, 123–132. [Google Scholar] [CrossRef]
- Lee, C.; Park, S. Flaw Imaging Technique for Plate-Like Structures Using Scanning Laser Source Actuation. Shock. Vib. 2014, 2014, 1–14. [Google Scholar] [CrossRef]
- Lee, C.; Park, S. Damage visualization of pipeline structures using laser-induced ultrasonic waves. Struct. Heal. Monit. 2015, 14, 475–488. [Google Scholar] [CrossRef]
- Tran, D.Q.; Kim, J.-W.; Tola, K.D.; Kim, W.; Park, S. Artificial Intelligence-Based Bolt Loosening Diagnosis Using Deep Learning Algorithms for Laser Ultrasonic Wave Propagation Data. Sensors 2020, 20, 5329. [Google Scholar] [CrossRef]
- Tola, K.D.; Tran, D.Q.; Yu, B.; Park, S. Determination of Plate Corrosion Dimension Using Nd:YAG Pulsed Laser-generated Wavefield and Experimental Dispersion Curves. Materials 2020, 13, 1436. [Google Scholar] [CrossRef] [Green Version]
- Lee, C.; Zhang, A.; Yu, B.; Park, S. Comparison Study between RMS and Edge Detection Image Processing Algorithms for a Pulsed Laser UWPI (Ultrasonic Wave Propagation Imaging)-Based NDT Technique. Sensors 2017, 17, 1224. [Google Scholar] [CrossRef] [Green Version]
- Michaels, J.E. Ultrasonic wavefield imaging: Research tool or emerging NDE method? AIP Conf. Proc. 2017, 1806, 020001. [Google Scholar] [CrossRef] [Green Version]
- Carmen, V.; David, S.M. Intensity-Based Optical Systems for Fluid Level Detection. Recent Pat. Electr. Electron. Eng. 2012, 5, 85–95. [Google Scholar]
- Safizadeh, M.; Azizzadeh, T. Corrosion detection of internal pipeline using NDT optical inspection system. NDT E Int. 2012, 52, 144–148. [Google Scholar] [CrossRef]
- Chen, G.; Katagiri, T.; Song, H.; Yusa, N.; Hashizume, H. Investigation of the effect of a bend on pipe inspection using microwave NDT. NDT E Int. 2020, 110, 102208. [Google Scholar] [CrossRef]
- Miro, J.V.; Hunt, D.; Ulapane, N.; Behrens, M. Towards Automatic Robotic NDT Dense Mapping for Pipeline Integrity Inspection. In Field and Service Robotics; Springer: Manhattan, NY, USA, 2017; Volume 5, pp. 319–333. [Google Scholar]
- Kim, S.; Kim, C.H.; Bae, Y.-G.; Na, H.; Jung, S. NDT inspection mobile robot with spiral driven mechanism in pipes. In Proceedings of the IEEE ISR 2013, Seoul, Korea, 24–26 October 2013; pp. 1–2. [Google Scholar]
- Krys, D.; Najjaran, H. Development of Visual Simultaneous Localization and Mapping (VSLAM) for a Pipe Inspection Robot. In Proceedings of the 2007 International Symposium on Computational Intelligence in Robotics and Automation, Jacksonville, FL, USA, 20–23 June 2007; pp. 344–349. [Google Scholar]
- Dai, L.; Feng, H.; Wang, T.; Xuan, W.; Liang, Z.; Yang, X. Pipe Crack Recognition Based on Eddy Current NDT and 2D Impedance Characteristics. Appl. Sci. 2019, 9, 689. [Google Scholar] [CrossRef] [Green Version]
- Cha, Y.-J.; Choi, W.; Büyüköztürk, O. Deep Learning-Based Crack Damage Detection Using Convolutional Neural Networks. Comput. Civ. Infrastruct. Eng. 2017, 32, 361–378. [Google Scholar] [CrossRef]
- Azimi, M.; Eslamlou, A.D.; Pekcan, G. Data-Driven Structural Health Monitoring and Damage Detection through Deep Learning: State-of-the-Art Review. Sensors 2020, 20, 2778. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Y.; Newsam, S. Dense Net for dense flow. In Proceedings of the 2017 IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017; pp. 790–794. [Google Scholar]
- Shao, L.; Zhu, F.; Li, X. Transfer Learning for Visual Categorization: A Survey. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 1019–1034. [Google Scholar] [CrossRef] [PubMed]
- Hayward, G.; Hyslop, J. Determination of lamb wave dispersion data in lossy anisotropic plates using time domain finite el-ement analysis. Part I: Theory and experimental verification. IEEE Trans. 2006, 53, 443–448. [Google Scholar]
- Drain, L.E. Laser Ultrasonics Techniques and Applications; Routledge: Abington, UK, 2019. [Google Scholar]
- White, R.M. Generation of Elastic Waves by Transient Surface Heating. J. Appl. Phys. 1963, 34, 3559–3567. [Google Scholar] [CrossRef]
- Zhu, H.; Ge, W.; Liu, Z. Deep Learning-Based Classification of Weld Surface Defects. Appl. Sci. 2019, 9, 3312. [Google Scholar] [CrossRef] [Green Version]
- Hinton, G.E. Deep belief networks. Scholarpedia 2009, 4, 5947. [Google Scholar] [CrossRef]
- LeCun, Y.; Yoshua, B. Convolutional networks for images, speech, and time series. In The Handbook of Brain Theory and Neural Networks; MIT Press: Cambridge, MA, USA, 1997; pp. 255–258. [Google Scholar]
- Pascal, V.; Hugo, L.; Isabelle, L.; Yoshua, B.; Manzagol, P.-A. Stacked Denoising Autoencoders: Learning Useful Representations in a Deep Network with a Local Denoising Criterion. J. Mach. Learn. Res. 2010, 11, 3371–3408. [Google Scholar]
- Hinton, G.E.; Osindero, S.; Teh, Y.-W. A Fast Learning Algorithm for Deep Belief Nets. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef]
- LeCun, Y.; Bottou, L.; Bengio, Y.; Haffner, P. Gradient-based learning applied to document recognition. Proc. IEEE 1998, 86, 2278–2324. [Google Scholar] [CrossRef] [Green Version]
- Jozefowicz, R.; Vinyals, O.; Schuster, M.; Shazeer, N.; Wu, Y. Exploring the limits of language modeling. In Proceedings of the 2011 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Prague, Czech Republic, 22–27 May 2011; pp. 5528–5531. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef]
- Lee, H.S. A Structure of Convolutional Neural Networks for Image Contents Search. Master’s Thesis, Graduate School of Chung-Ang University, Seoul, Korea, 2018. [Google Scholar]
- TensorFlow. Available online: https://www.tensorflow.org/ (accessed on 9 November 2015).
- Keras. Available online: https://github.com/keras-team/keras (accessed on 14 June 2015).
- Abadi, M.; Barham, P.; Chen, J.; Chen, Z.; Davis, A.; Dean, J.; Devin, M.; Ghemawat, S.; Irving, G.; Isard, M.; et al. TensorFlow: A system for large-scale machine learning. In Proceedings of the 12th USENIX Symposium on Operating Systems Design and Implementation, Savannah, GA, USA, 2–4 November 2016; pp. 256–283. [Google Scholar]
- Tan, M.; Pang, R.; Le, Q.V. Efficient Det: Scalable and Efficient Object Detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 10778–10787. [Google Scholar]
- Tan, M.; Le, Q.V. Efficient Net: Rethinking Model Scaling for Convolutional Neural Networks. In Proceedings of the 36th International Conference on Machine Learning (ICML 2019), Long Beach, CA, USA, 28 May 2019; pp. 6105–6114. [Google Scholar]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D. 2014.Microsoft COCO: Common objects in context. Comput. Vis. ECCV 2014, 8693, 740–755. [Google Scholar]
- Liu, B.; Wei, Y.; Zhang, Y.; Yang, Q. Deep Neural Networks for High Dimension, Low Sample Size Data. In Proceedings of the Twenty-Sixth International Joint Conference on Artificial Intelligence (IJCAI-17), Melbourne, Australia, 19–25 August 2017; pp. 2287–2293. [Google Scholar] [CrossRef] [Green Version]
- Pan, S.J.; Yang, Q. A Survey on Transfer Learning. IEEE Trans. Knowl. Data Eng. 2010, 22, 1345–1359. [Google Scholar] [CrossRef]
- Rezatofighi, H.; Tsoi, N.; Gwak, J.; Sadeghian, A.; Reid, I.; Savarese, S. Generalized Intersection Over Union: A Metric and a Loss for Bounding Box Regression. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 658–666. [Google Scholar]
- Everingham, M.; Van Gool, L.; Williams, C.K.I.; Winn, J.; Zisserman, A. The Pascal Visual Object Classes (VOC) Challenge. Int. J. Comput. Vis. 2010, 88, 303–338. [Google Scholar] [CrossRef] [Green Version]
- Kim, M.; Shin, S.; Suh, Y. Application of Deep Learning Algorithm for Detecting Construction Workers Wearing Safety Helmet Using Computer Vision. J. Korean Soc. Saf. 2019, 34, 29–37. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Laser Head: Brilliant Ultra GRM100 | Galvanometer: Scancube 10 |
|---|---|
| Wavelength: 1064 nm | Wavelength: 1064 nm |
| Energy per pulse: 100 mJ | Tracking error: 0.16 ms |
| Pulse repetition rate: 20 Hz | Positioning speed: 10 m/s |
| Pulse duration: 6.5 ns | Max. angular velocity: 100 rad/s |
| Beam diameter: 3 mm | (within 0.35 rad) |
| Batch Size | Steps | Epochs | No. of Samples |
|---|---|---|---|
| 8 | 10,000 | 80 | 1000 |
| 8 | 30,000 | 240 | 1000 |
| 8 | 50,000 | 400 | 1000 |
| Test Image | Step 10,000 | Step 30,000 | Step 50,000 |
|---|---|---|---|
| 1 | 79% | 89% | 97% |
| 2 | 79% | 88% | 96% |
| 3 | 79% | 90% | 97% |
| 4 | 78% | 91% | 96% |
| 5 | 77% | 91% | 98% |
| 6 | 72% | 90% | 98% |
| 7 | 73% | 90% | 94% |
| 8 | 77% | 89% | 94% |
| 9 | 77% | 89% | 94% |
| 10 | 77% | 90% | 92% |
| 11 | 78% | 87% | 84% |
| 12 | 77% | 87% | 92% |
| 13 | 82% | 83% | 86% |
| 14 | 85% | 88% | 90% |
| 15 | 86% | 85% | 89% |
| 16 | 85% | 81% | 89% |
| 17 | 85% | 80% | 91% |
| 18 | 82% | 75% | 88% |
| 19 | 76% | 76% | 90% |
| 20 | 66% | 76% | 94% |
| 21 | 67% | 81% | 91% |
| 22 | 66% | 83% | 90% |
| 23 | 62% | 78% | 95% |
| 24 | 59% | 78% | 93% |
| 25 | 58% | 73% | 89% |
| 26 | 67% | 77% | 88% |
| 27 | 68% | 72% | 85% |
| 28 | 68% | 70% | 81% |
| 29 | 58% | 72% | 87% |
| 30 | 67% | 74% | 83% |
| 31 | 71% | 80% | 75% |
| 32 | 73% | 83% | 68% |
| 33 | 77% | 90% | 85% |
| 34 | 80% | 92% | 94% |
| 35 | 82% | 92% | 94% |
| 36 | 82% | 92% | 94% |
| 37 | 83% | 91% | 94% |
| 38 | 84% | 93% | 94% |
| 39 | 86% | 93% | 96% |
| 40 | 87% | 94% | 99% |
| 41 | 87% | 94% | 98% |
| 42 | 87% | 92% | 98% |
| 43 | 88% | 93% | 97% |
| 44 | 88% | 95% | 98% |
| 45 | 88% | 94% | 98% |
| 46 | 88% | 94% | 97% |
| 47 | 88% | 95% | 98% |
| 48 | 89% | 96% | 98% |
| 49 | 86% | 95% | 95% |
| 50 | 85% | 95% | 96% |
| 51 | 82% | 93% | 96% |
| 52 | 85% | 93% | 96% |
| 53 | 87% | 93% | 96% |
| 54 | 88% | 93% | 98% |
| 55 | 89% | 93% | 98% |
| 56 | 88% | 94% | 97% |
| 57 | 85% | 92% | 96% |
| 58 | 82% | 93% | 94% |
| 59 | 83% | 93% | 94% |
| 60 | 84% | 90% | 92% |
| 61 | 84% | 92% | 96% |
| 62 | 83% | 91% | 96% |
| 63 | 83% | 94% | 93% |
| 64 | 83% | 92% | 92% |
| 65 | 80% | 92% | 94% |
| 66 | 82% | 92% | 94% |
| 67 | 82% | 89% | 96% |
| 68 | 81% | 87% | 94% |
| 69 | 77% | 89% | 97% |
| 70 | 77% | 90% | 97% |
| 71 | 77% | 87% | 92% |
| 72 | 63% | 68% | 64% |
| 73 | 51% | 57% | 0% |
| 74 | 0% | 66% | 52% |
| 75 | 58% | 69% | 0% |
| 76 | 50% | 70% | 53% |
| 77 | 0% | 53% | 0% |
| 78 | 0% | 56% | 58% |
| 79 | 67% | 76% | 50% |
| 80 | 87% | 93% | 98% |
| Average detection rate | 75% | 86% | 88% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, B.; Tola, K.D.; Lee, C.; Park, S. Improving the Ability of a Laser Ultrasonic Wave-Based Detection of Damage on the Curved Surface of a Pipe Using a Deep Learning Technique. Sensors 2021, 21, 7105. https://doi.org/10.3390/s21217105
Yu B, Tola KD, Lee C, Park S. Improving the Ability of a Laser Ultrasonic Wave-Based Detection of Damage on the Curved Surface of a Pipe Using a Deep Learning Technique. Sensors. 2021; 21(21):7105. https://doi.org/10.3390/s21217105
Chicago/Turabian StyleYu, Byoungjoon, Kassahun Demissie Tola, Changgil Lee, and Seunghee Park. 2021. "Improving the Ability of a Laser Ultrasonic Wave-Based Detection of Damage on the Curved Surface of a Pipe Using a Deep Learning Technique" Sensors 21, no. 21: 7105. https://doi.org/10.3390/s21217105