1. Introduction
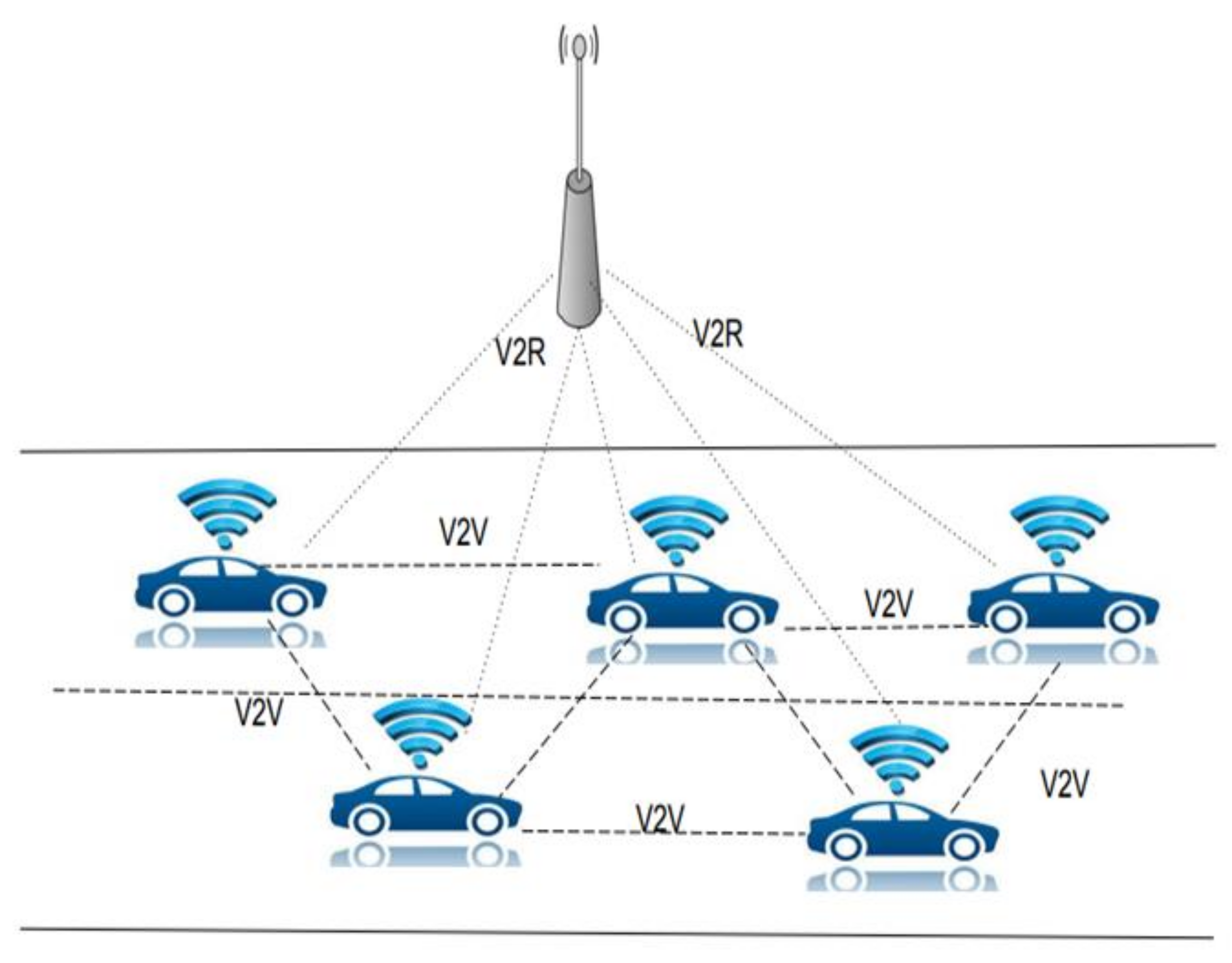
Vehicular ad hoc network (VANET) has a major role in the development of an intelligent transportation system (ITS). It is defined as a wireless network that uses wireless local area network (WLAN) technology for vehicles on the road as the nodes of the network. The network supports communication between vehicles as well as between the vehicle and road-side unit. The VANET structure is depicted in
Figure 1. The applications in VANET include traffic management, safety, and entertainment applications to improve the comfort and safety of road travelers.
The network topology changes often due to the high mobility of vehicles on the road [
1]. This complicates the design of VANET resource allocation and routing. To support communication in VANET, the standard organization IEEE developed dedicated short-range communications (DSRC). VANET uses a frequency spectrum of 5.850 to 5.925 GHz [
2]. This frequency group has seven channels, including a control channel (CCH) for the broadcast of control messages and six data-service channels to support VANET comfort applications.
VANET follows IEEE 802.11p for medium access control. Later, the standard was amended, and VANETs began to use wireless access vehicular environment (WAVE) for security and operations with multiple channels. IEEE 802.11p follows an enhanced distributed coordination function (EDCF) for the access of the channel. EDCF is a contention-based method.
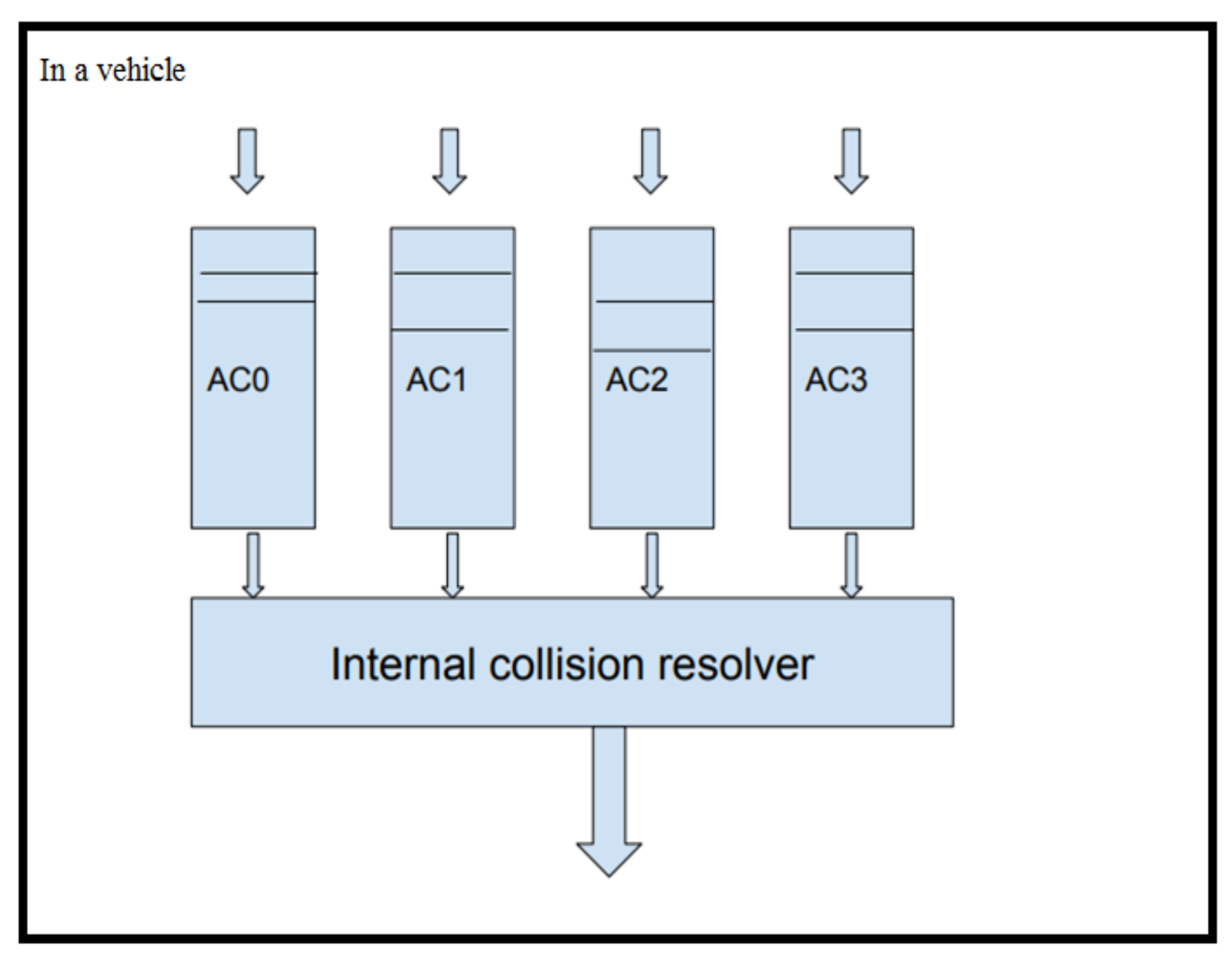
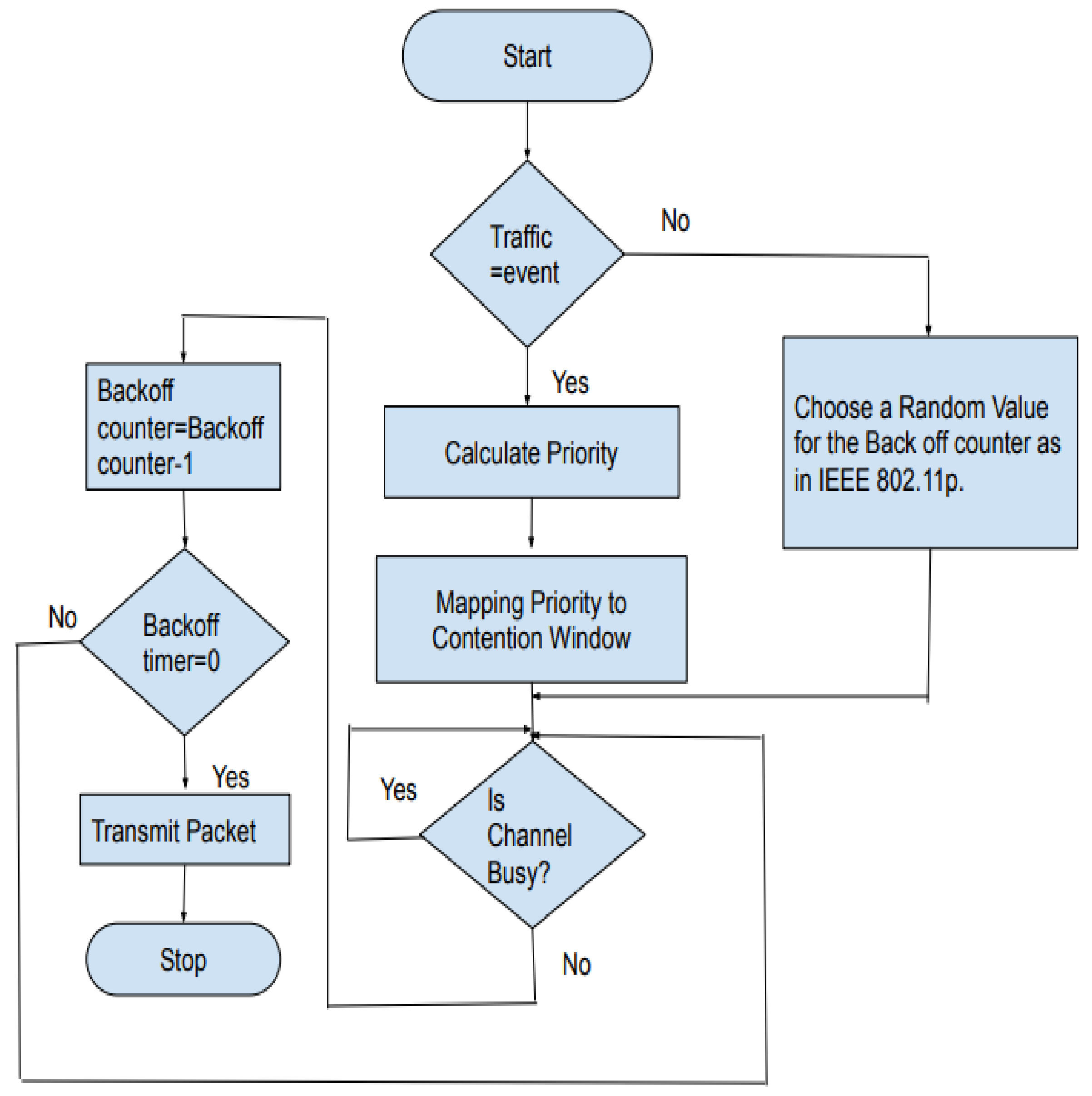
Figure 2 shows IEEE 802.11p working in a vehicle. It categorizes the traffic in a vehicle into four based on the access category. The packets are scheduled internally by an internal scheduler. The scheduled packet from each node will have to contend with other nodes that follow the same protocol in the network for obtaining channel access for transmission.
The carrier sense multiple access/collision avoidance (CSMA/CA) technique is used by the nodes to access the channel. Before attempting transmission, the node will check the type of access category and adapt the transmission parameters as shown in
Table 1. Then, the node will sense the channel for an arbitrary inter frame space (AIFS) period. If the transmission medium is idle for AIFS time, the node will select a back off value from the contention window at random, which will prevent a node from accessing the channel at the same time as other nodes. The node will continue sensing the medium during the back off period. If the medium is not free, the back off timer will be frozen, and the node will try to connect the channel after waiting for some time. If the medium is free, the node will access the channel. IEEE 802.11p follows the broadcast mode of communication to transmit safety messages over the control channel. The transmission is not acknowledged, as too many acknowledgements from the nodes can congest the channel. IEEE 802.11p has a poor performance for safety messages [
3].
1.1. Motivation and Objectives
The main application in the Intelligent Transportation System is the provision of driver assistance to avoid casualties on the road. The forward collision warning application of co-operative collision warning works with the safety messages. The safety messages are of two types, and the first one is the routine safety messages (non-emergency) that are periodically updated by the nodes. These messages contain the details of its position, speed, etc. The second type of safety message is the event safety (emergency) messages that occur due to certain events that happen on the road. Safety messages are disseminated through the control channel to the neighboring nodes by means of broadcast mode of communication. Therefore, they follow AIFSN with two and a contention window range of three. These messages must be disseminated quickly so as to make the driver take the necessary steps to avoid accidents. However, in IEEE 802.11p, both these safety messages are considered with the same priority, and broadcast messages lack an acknowledgement. Therefore, there is a chance that the messages may not reach the neighboring nodes on time.
Packets from an emergency vehicle should be transmitted with priority as its impact on other vehicles is high. The routine safety messages also must be given a fair chance to be transmitted, as it is necessary for the vehicles to be alerted about the details of neighbor nodes to avoid accidents. In this work, a priority-based cooperative MAC that works with an adaptive contention window mechanism for the provision quality of service in the forward collision warning application is proposed. The scheme studies the context of a packet, its average relative distance with other nodes, and the average velocity of the platoon to calculate the priority of the packet. The priority values of the packet from on-the-road cars are used to adaptively modify the contention window parameter.
1.2. Novelty and Contributions
We proposed a priority-based cooperative medium access control (PCMAC) protocol that makes the following contributions:
The protocol improves IEEE 802.11p performance for supporting forward collision warning applications in VANET. The scheme improves the delivery of emergency (event) messages by prioritizing them over the non-emergency messages by using an adaptive contention window.
The proposed scheme provides a service differentiation among the emergency and non-emergency message in the safety category of IEEE 802.11p by implementing a dynamic contention window for the emergency packets based on the priority of the packet from the node at the instant. The non-emergency message, the routine safety message in IEEE 802.11p, follows the same strategy that was implemented in IEEE 802.11p.
The performance of the broadcast with service differentiation for emergency messages over non-emergency message in the safety category of IEEE 802.11p with an analytical model is studied.
1.3. Paper Organization
The remaining section of the paper is structured as follows. Related research reported in the relevant area is outlined in
Section 2.
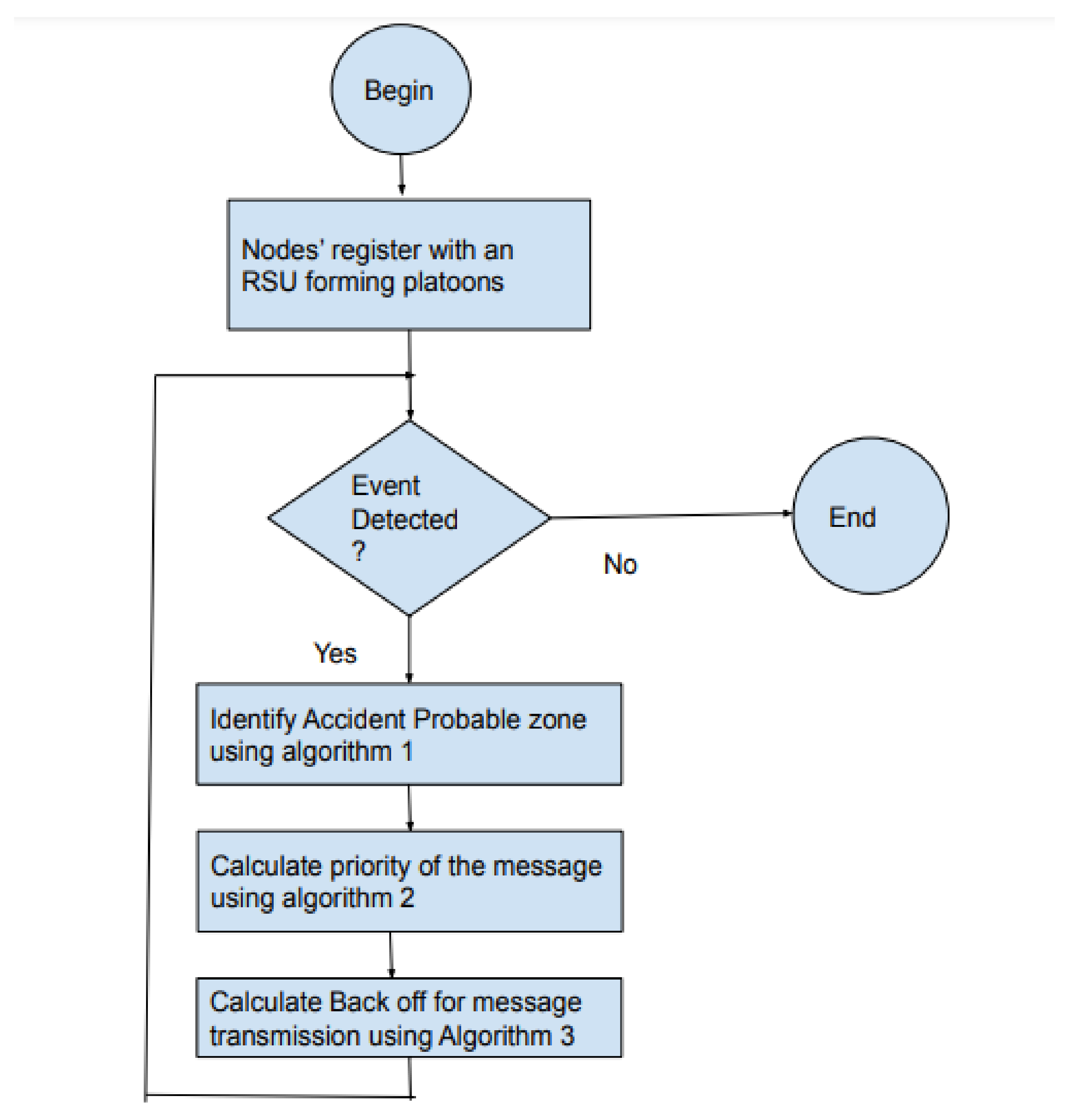
Section 3 describes the proposed priority-based cooperative MAC.
Section 4 presents the mathematical modeling of the scheme, followed by discussions on the results obtained in
Section 5.
Section 6 gives the concluding remarks.
2. Related Work
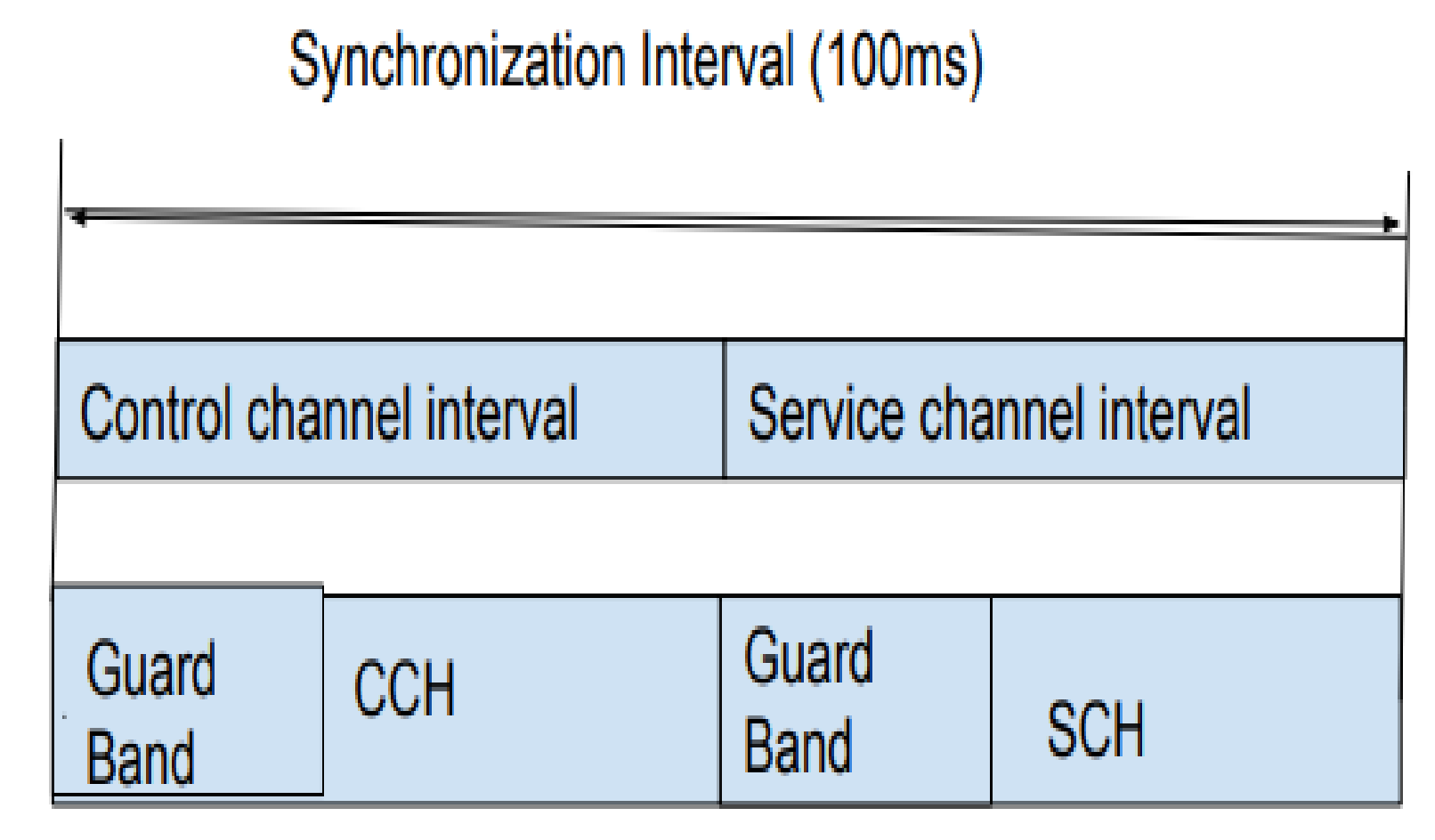
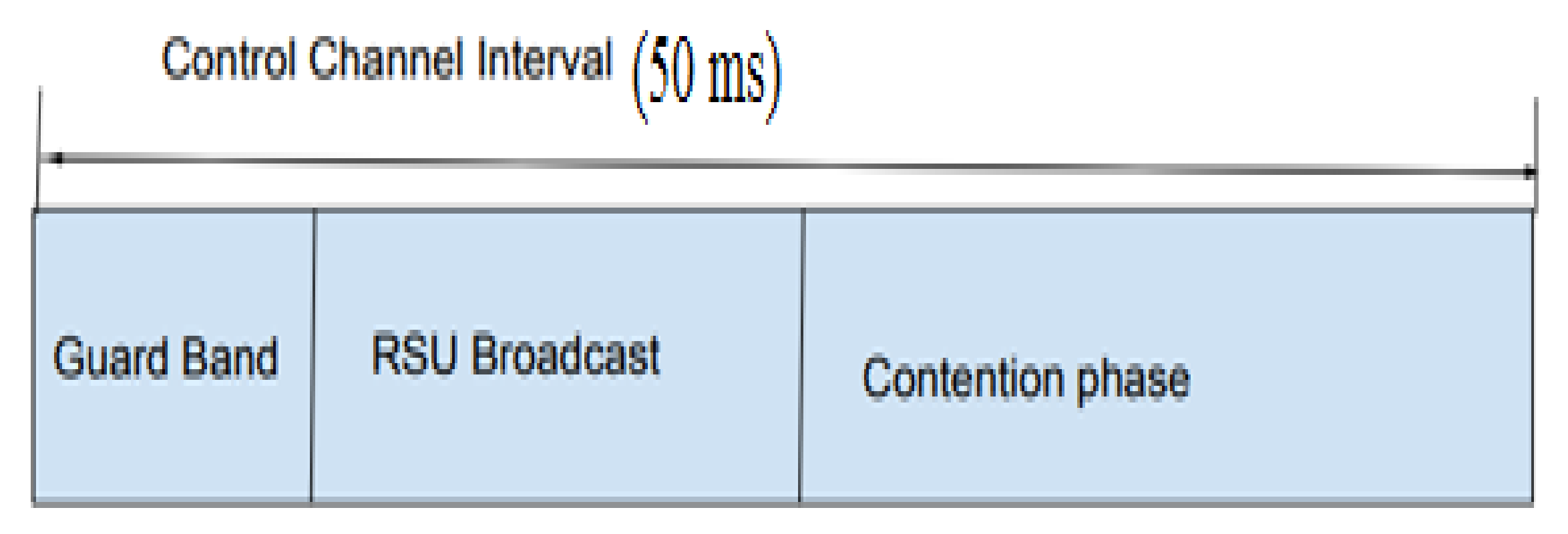
According to the literature, the idea of Vehicular Ad-hoc Networks was introduced in the early 1980s, and research in this field exploded in the 2000s. The vehicles use the channels in the communication band (5.8–5.9 GHZ) designated by DSRC to convey non-safety and safety messages. DSRC also developed IEEE 802.11p as the MAC for resource sharing. Later, with the amendment of wireless access in vehicular environments (WAVE), the system moved on to a multi-channel scenario that follows a synchronous interval that alternates between control channels and data channels, as shown in
Figure 3. VANET broadcasts control messages over the control channel and data services over the service channels. The safety messages and data channel negotiation happen at the control channel and during the service channel interval; non-safety data transfer happens at the negotiated data channel. Each vehicle must compete with other cars for the control channel to convey data. The priority of safety communications is always higher than that of non-safety data communications. The control channel communication happens by broadcast. The broadcast message will not have an acknowledgement from the receivers. When the node density increases, the contention for channel increases, and as a result, the chances of the message to be transmitted are low. The studies show that IEEE 802.11p has a poor performance with broadcast [
3].
The safety messages can be both the routine update messages that are periodically sent between vehicles [
6] and the event messages that are created upon the occurrence of an event [
7]. IEEE 802.11p supports service differentiation for different applications in VANET. Many studies have been conducted to enhance the performance of IEEE802.11p by modifying the transmission parameters [
8,
9,
10,
11]. Bianchi suggested a statistical approach to analyze the channel utilization and throughput [
12]. In this work, safety message transmission assures the quality of service by improving the performance of IEEE 802.11p for forward collision avoidance.
The transmission parameter and contention window is modified to improve the performance of IEEE 802.11p, adapting it to various applications of VANET. Existing works that alter the contention window with cooperative collision warning that supports QoS with broadcast communication is studied in this section.
To meet the needs of the IEEE802.11p network with fluctuating network density in [
13], the minimum and maximum contention windows are changed based on network performance. The authors in [
14] discuss dynamic contention window adaption and transmission power for automobiles on the basis of the density of nodes and the packet collision rate. However, the performance of the scheme will be affected at high power levels. The authors [
15] use the traffic density in the network to alter the contention window size. The performance of IEEE802.11p with an adaptive back-off window is examined in two different ways in [
16]. The first is a centralized method in which the base station calculates an appropriate contention window based on vehicle density. The second technique is a distributed approach, in which each vehicle chooses the back-off time based on their local channel information. A self-adjusting contention window-based technique for increasing VANET efficiency that utilizes the persistence factor is discussed in [
17]. The authors of [
18] discuss an adaptive contention window approach that maps the priority value to the node density.
The method can effectively increase overall throughput and reduce packet collision rate and delay time. However, the contention windows in these schemes are calculated as the function of the sum of the number of competing nodes detected by both the sender and the receiver. The number of competing nodes vary at each instant, and it is difficult to track this value. The schemes do not consider the mobility of the nodes.
IEEE 802.11p provides service differentiation for different categories of data. However, it treats the beacon and event message as a safety category. The event messages should be given higher priority when compared to the beacon messages. The drivers can react as they receive the event messages and thereby reduce the number of accident cases on the road. The beacon message is periodically broadcast. It should also be given a fair chance to access the channel, as it is very much needed by the vehicles to learn about the neighboring vehicles in its locality. Many literatures have priority assignment in combination with IEEE802.11e. In [
19], an inter-vehicle communication, where the chance of transmission is improved by repeatedly delivering high priority signals over low priority messages, is studied. However, there are chances for the high priority signals to occupy the channel always, and this leads to the under-utilization of service channels. The authors of [
20] concentrated on the issue of ensuring fairness for the nodes with varying mobility under each RSU. The topic of balancing throughput and fairness is treated as a multi-objective optimization problem in [
21]. RSU calculates the ideal transmission probability, and the nodes begin transmission at a lower level than this value. It calculates the fairness index after a brief period and dynamically updates the probability of transmission based on the value. However, the threshold for the probability of transmission is set per the ideal channel conditions, and this may vary the performance. In [
22], the velocity and density of the network is considered to provision the QoS of different traffic classes. However, these schemes do not consider the network conditions along with the velocity of the node, which plays a pivotal role in performance of the system.
In [
23], the suitability of DSRC to support vehicular safety application called cooperative collision warning (CCW) is studied. It also discusses the different types of applications that are issued under CCW. They found that the necessary QoS is dependent upon the application’s parameters setting. In [
24], a rapport between network traffic and emergency cases over the highway is studied. The article studied some of the emergency cases over the highway and showed that the impact of accidents on the near-by vehicles traveling is grounded on parameters such as speed, relative location of the nodes from the accident, and moving direction of the vehicle. The work aims to improve throughput for the reduction of travel time, fuel consumption, etc. In [
25], the focus is on achieving low latency for delivering emergency warnings in case of an event. The authors discuss the application challenges, focusing on congestion control issues linked with the vehicular cooperative collision warning application. It considers the existence of one or more broken vehicles. The simulation results showed that the warning message delivery delay is low when the channel conditions are poor. In [
26], priority-based direction aware MAC protocol is discussed. The protocol proposes a cluster based V2V MAC protocol called PDMAC for prioritizing warning message delivery in VANETs. It considers the severity level, direction, and message type. PDMAC also suggests a method to synchronize the clock for inter-vehicular communication. The scenario considered in this work is a highway. It reduces message loss rate and end-to-end delays, increasing network throughput. However, the protocol has communication overhead. It considers only the speed factor to analyze the severity of the message. In [
27], a frame in this protocol has two types of slots, TDMA slots for beacon broadcast and CSMA slots for transmitting warning messages. It uses a stochastic model based on minimum safety distance to forecast the average number of accidents that could happen in the platoon. This value is used to determine the part of CSMA segment in the time frame of the protocol. However, the transmission delay is relatively larger in an overload traffic scenario.
Broadcast over the control channel is studied using an analytical model in [
28]. V2V collision avoidance applications with context-aware communication is studied in [
29]. The authors of [
30] discuss the prioritization of received data flow on the basis of the impact of the message on a vehicle acting as receiver. This paper states that prioritization must be done based on severity metric. The work defines severity based on the application as a metric of vehicle speed, direction, and position. A dynamic information quantity-based to an emergency-degree is studied in [
31] to support safety service in VANET. The work deals with performance improvement of the broadcast in IEEE 802.11p using dynamic updating of contention window based on the change in vehicle density.
The studies on the safety message dissemination can be classified into three categories: (1) those based on network statistics and density, (2) those based on the mobility of nodes, and (3) those based on the severity of the message. The last category combines the first two categories with other parameters such as the direction, location, and access type to learn the severity of the message. The overview of the works is summarized in
Table 2.
The review of the literature clearly demonstrated the necessity for an enhancement in IEEE802.11p for the provision quality of service for the forward collision warning system. The proposed improvement is discussed in the next section.
4. Mathematical Modeling
Safety message dissemination for driver assistance and comfort applications for travelers are the major applications in intelligent transportation systems. For supporting driver assistance, the vehicles will periodically broadcast safety messages to the other vehicles within its vicinity. However, as the vehicles density increases, the competition for channel access increases, leading to the deterioration of system performance. A message entering the buffer will be transmitted only if the previous message in the buffer is already sent. We have followed the model similar to [
9,
28]. These models used the sojourn time of the vehicle to model back-off. In PCMAC, the impact of a node or the severity of the node, as referred to in [
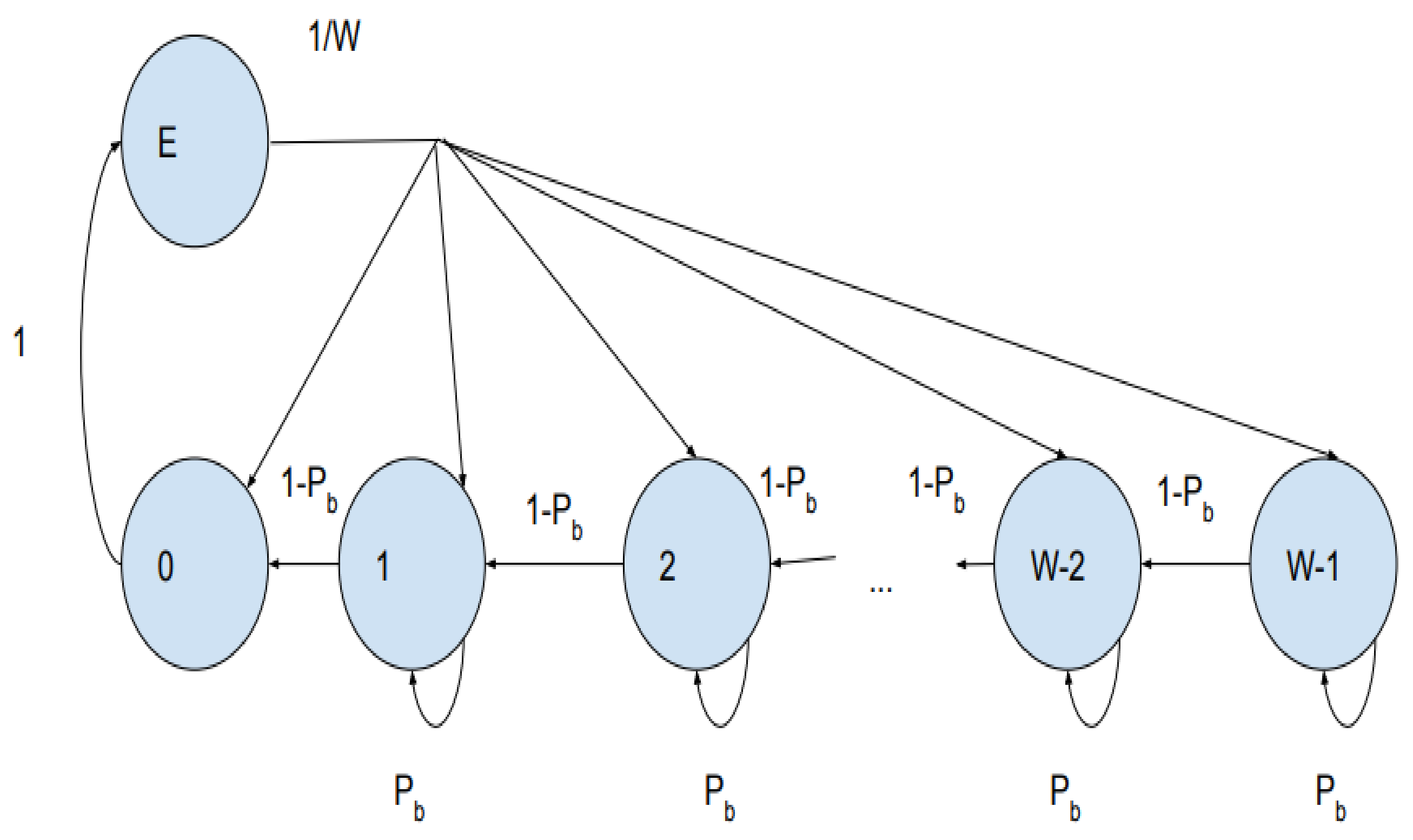
30] with respect to an accident in its surrounding, is analyzed, and the nodes are prioritized based on their severity. The priority value of a node depends on the relative distance of the node from the accident, the average velocity of the platoon, and the position of the node at that instant. A one-dimensional Markov chain is used to study the performance of safety message broadcast in VANET.
In
Figure 8, P
b represents the chance of the medium to be busy and P
f = (1 − P
b) represents the likelihood of the medium to be free. The values of P
b and P
f are defined in terms of CW, which is randomly chosen from the interval of 0 to (W−1). Vacant state of the buffer is represented as state E. After the transmission of a message, the packet will enter an empty state, so the transition probability to move from state 0 to state E is 1. The transition probabilities as per
Figure 8 are as follows:
Let
b(
t) represent the stochastic processes for the back-off timer, and
can have the probability values of CW being k.
Therefore, from (7) we can write as
After substituting (8) in (9) we obtain
.
as the transmission probability of the node represented as
.
Equation (10) shows that the transmission probability depends on the contention Window (W).
The value of W is mapped to the priority of the node at an instant. Priority is calculated as a function of Impacti(t). The average relative distance of nodes is with respect to nodei at instant t and Average velocity of the platoon at instant t. Considering the range as 100 m and the maximum velocity of the vehicle as 100 Km/h, the maximum possible value of priority depends on the Impacti(t). Impact is measured as shown in Equation (1), where the maximum number of nodes possible behind a node is (N−1).
Let n0 be the cardinality of the low priority node set and n1 be the cardinality of the high priority node set. The collision probability of the beacon message is studied by analyzing the events that happen in time slots. In a time slot, the following events can happen:
The probability of the medium to be idle, i.e., this condition happens when no node tries to occupy the channel.
Probability of the channel to be busy, i.e., this condition happens when at least one node in the network tries to occupy the channel.
Probability of success, i.e., this condition happens when only one node selects the channel for transmission.
Therefore, the probability of collision,
.
PCMAC works with an adaptive contention window as per the priority of the packet from a node at an instant, and therefore, the expectation of back off value is given in Equation (15).
In broadcast, the time of transmitting a packet,
where
and
.
For a broadcast operation, an acknowledgement is not obtained from the nodes to know whether the attempted transmission had a packet collision or successful transmission. Therefore, the time for a successful transmission and the time for a packet collision, is equal.
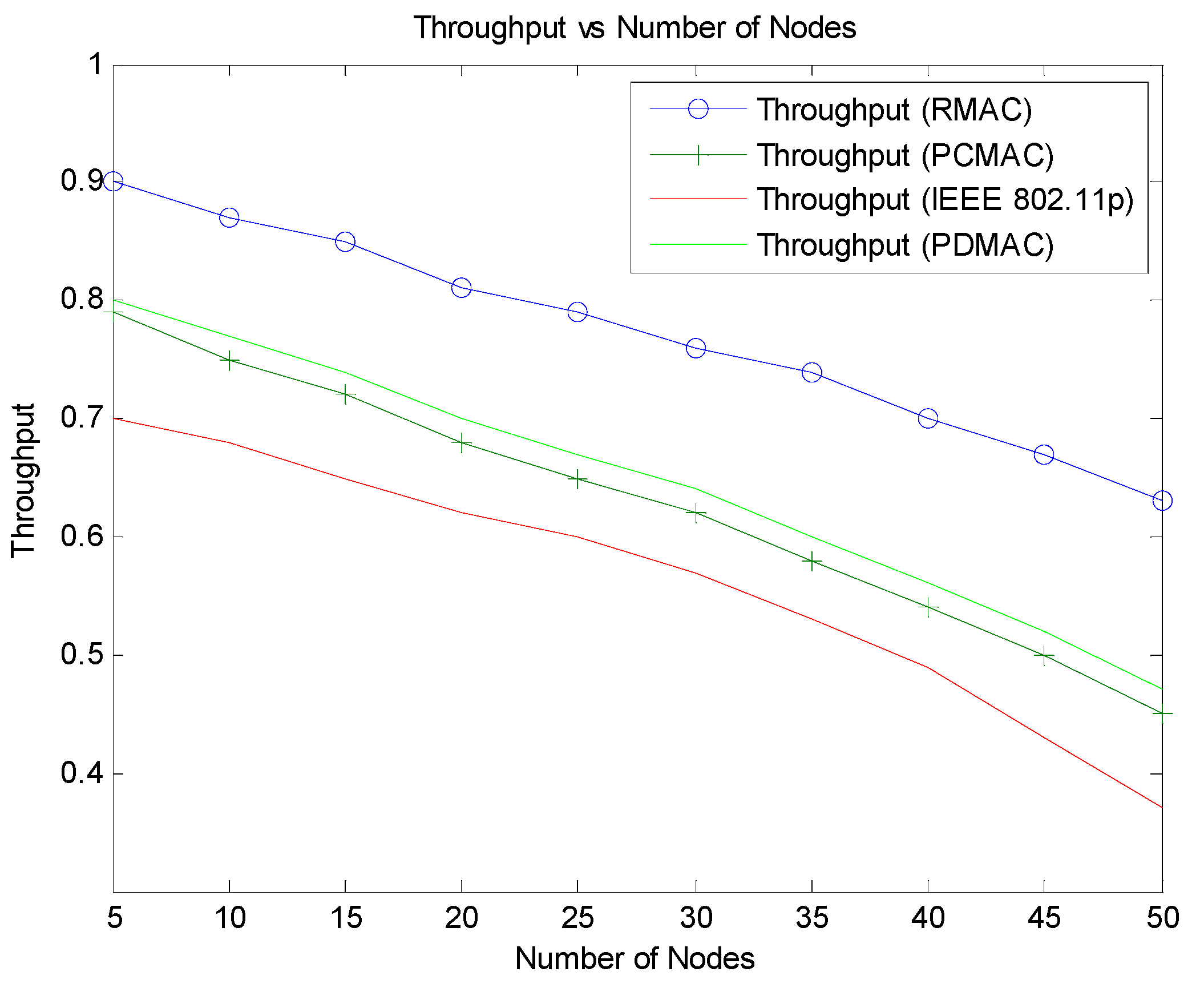
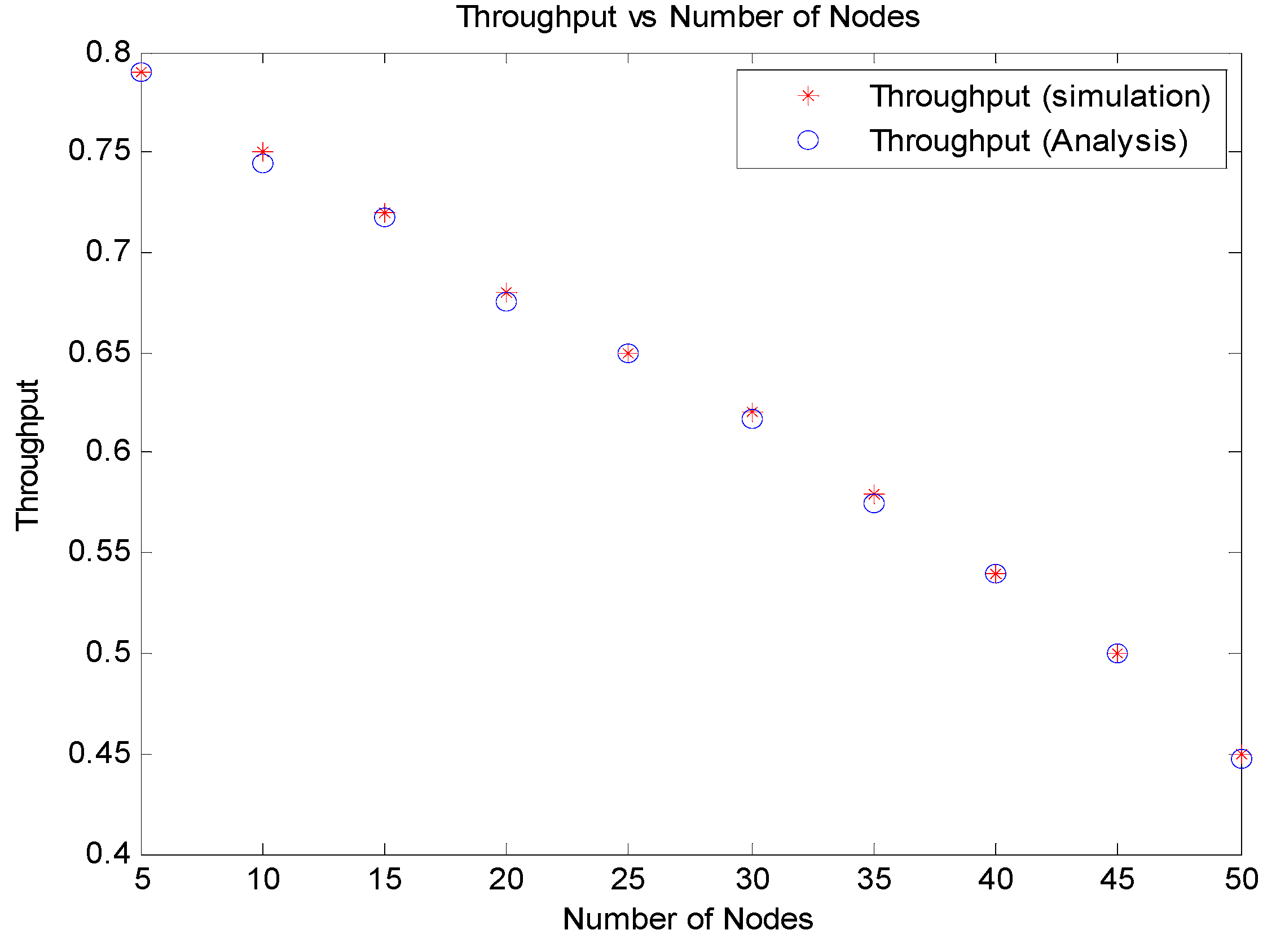
Throughput of the system can be written as
where
E[
L] is the average length of the packet. Delay is calculated as the sum of time for back-off and transmission time.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}