1. Introduction
Structural health monitoring (SHM) that consists of multidisciplinary technologies such as sensor, data processing, computer modeling, and mechanics inverse analysis can be responsible for the aging of infrastructures with the advantage of reducing the cost of the visual-based inspection and raising the efficiency of safety assessments. For the past two decades, there has been a rapid rise in the use of the civil SHM system [
1,
2]. The popularization and use of intelligent sensors have been increasingly common on bridges, tunnels, dams, tall buildings, and long-span spatial structures, thus gaining a large amount of operational data of structural facilities. Making full use of SHM data to serve structural health diagnosis and prognosis effectively has become a recent trend in this field [
3,
4,
5,
6].
In fact, SHM data interpretation to reveal the structure’s health state has received much attention over the last two decades, though most studies only used limited data. These data interpretation strategies could be roughly divided into two families: model-based and data-driven strategies [
7,
8]. The former generally depends on the accurate finite element model of a real structure and limited vibration observation to obtain its numerical updated version to quantify damage but often requires additional computation to solve the inverse problem. On the other hand, the latter aims to extract the damage-sensitive features and classifications to facilitate achieving SHM’s objective of online diagnosis [
9]. However, previous SHM activities have laid particular stress on technologies of interest, such as testing novel sensing systems, while many failed to follow up corresponding diagnoses and prognoses and face up to the challenges of data interpretation in situ. Researchers from References [
4,
10,
11] boiled down the challenges in this field to two aspects: incomplete and erroneous monitoring data and the coupling effects of local damage and time-varying (e.g., thermal, traffic, etc.) loads. Lately, machine learning tools are anticipated to help understand structural behaviors and select key attributes from massive operational data to improve data-driven strategies [
4,
5,
12], such as using the support vector machine [
13], principal component analysis [
14,
15], low-rank and sparse optimization [
16,
17], deep learning [
18], and computer vision [
19,
20] methods. These methods that can often be used for big data analysis can also offer potential solutions for the data management and maintenance of in-service infrastructures. In this context, this work focuses on fixing the second challenge mentioned above to a certain extent.
The inevitable damage accumulation in the in-service infrastructure firstly gives rise to the local performance degradation of the structural components/system. Since strain monitoring data from SHM activities can directly relate to the stress redistribution in the vicinity of the strain sensor, such as damage initiation and development, strain-based damage detection approaches are recognized as great importance to structural health diagnosis [
21,
22,
23,
24]. Structural strain monitoring data could be divided into quasi-static and dynamic (high-frequency) ingredients, producing corresponding damage detection approaches [
25,
26,
27,
28]. As far as the theoretical approaches are concerned, the significant change of strain data or strain-based feature data will appear when there is damage triggering. However, due to the homologous characteristics of structural responses that reflect changing environmental and operational conditions, the strain-based damage detection approaches also face the above second challenge of SHM data interpretation [
29,
30]. Therefore, time-varying impacts on strain responses should be accounted for to avoid masking the effects caused by structural damage.
Conventionally, supervised models can be constructed by the regression between environmental parameters and structural damage-sensitive features to reduce the adverse impacts of these time-varying conditions in a structural health diagnosis. Much research considers the corresponding physical principle as a black-box model and assumes that all its parameters can be determinate from the training data, such as utilizing the measured temperatures and quasi-static strains in a long-term period [
30,
31]. Nevertheless, the influence of environmental factors (e.g., temperature and humidity) on the observed damage-sensitive feature data may be physically very complex and often not fully understood [
32,
33,
34]. For example, the thermal-related strain of each rod in the truss bridge may be dominated by the specific temperature gradient [
35], which makes it challenging to construct a unified explicit model. In addition, there are not sufficient sensors to meet the complete long-term observations of environmental conditions of infrastructure, such as its temperature distribution and radiation parameters, thereby increasing the model uncertainty in the structural health diagnosis.
An alternative data-driven strategy uses environmental effects as latent variables by employing unsupervised multivariate statistical tools. Following the orthogonal projection methodology, such as the principal component analysis (PCA), the new multivariate data in the hyper-plane projection space could be split into two distinct ingredients to represent the effects of dominant environmental factors and noises or anomalies, respectively [
36,
37]. Yan et al. utilized PCA to define the vibration features identified at different instants of the monitoring data under the linear or weakly nonlinear cases to distinguish between changes due to environmental variation and structural damage by the novel damage indicator (DI) [
38]. Posenato et al. proposed to apply a sliding time window to quasi-static strain data set, resulting in the Moving PCA method [
39], which executes PCA using only the latest window-sized data to obtain DI from the principal component directions and, thus, allows the online damage detection. However, since the latent variables assumption exists in the multivariate statistical tools, the underdetermination and overestimation of the damage are still inevitable due to the physical complexity and the limited measuring points. For this reason, Zhu et al. proposed to use independent component analysis to screen the combinations of strain sensors to get the ones with the highest correlation between temperatures and quasi-static strains before the Moving PCA was executed for anomaly detection [
40]. The strategy enhances the sensitivity of anomaly detection and eliminates the delay from the application of the Moving PCA only. Liu et al. combined strain sensors in different bridges into various clusters in a similar thermal-related strain probability distribution [
41]. The subsequent damage detection step was carried out on each independent cluster, in which the DI based on the probability distribution of strain monitoring data is insignificantly affected by the environmental temperatures. In general, although decoupling of damage and thermal effects is currently considered concerning strain monitoring data, the challenges related to complex physical principles and dependence on environmental information still exist.
In this paper, an idea that offers data interpretation in a distinct time scale is employed. Short-term dynamic strain response data dominantly rendered by the operating loads are applied to the analysis. Due to the fact that the frequency of environmental conditions (e.g., thermal effects) is considerably lower than the frequency of structural vibration under operating conditions (e.g., traffic), the analyzed signals for a shorter temporal length no longer depend on the temperature-dominated correlation [
42,
43,
44]. Meanwhile, the high-frequency ingredient in the raw strain monitoring data can be apt to be separated from the ingredient of the daily temperature variations by the wavelet or other time–frequency transform tools [
29]. Moreover, when some operating loads dominate the target structure at a series of small time-scale periods, the structural responses are likely to behave regularly, facilitating damage-sensitive feature extraction and the subsequent decoupling. Hence, environmental information such as temperature may not participate in data interpretation in such time sequences.
In this context, there is a two-step approach brought forward in this work to processing raw strain monitoring data only under operating loads for damage detection: in the first step, since relatively high-frequency dynamic strains increase the amount of data, the wavelet analysis tool is first used to process the strain responses to achieve initial feature extraction; in the next step, two data-driven methodologies, PCA and another one denominated as the low-rank subspace projection are presented and applied in this work, respectively, for decoupling the effects on the strain-based feature data of the operating loads and anomalies (probably structural damages), thereby getting corresponding local and global DI values. On these bases, an output-only damage detection strategy is proposed, consisting of data collection, anomaly detection and the above two key steps and executes these procedures efficiently and successively in the sliding time window.
To validate the damage detection strategy developed, we customize a steel truss model and its reaction frame system for continuous random excitations that can simulate time-varying operating loads, thus acquiring several independent vibration data to form the raw strain monitoring data set analyzed. The proposed two-step approach is carried out to obtain the global DI values and their outlier analysis results in each sliding time window and to exhibit the local DI values once the damage alert is raised. The results show that the strategy can detect the damage presence in the truss structure and the evolution from one to another damage state in time. The effects of damage localization from the two alternative decoupling methods are fully compared in the experiment. Moreover, the performance of the damage detection strategy is further evaluated concerning the cases of missing data and limited sensor deployments.
2. Approach
Figure 1 shows the output-only damage detection strategy consisting of two key steps: initial feature extraction and decoupling (or named local and global DI calculation), as well as the other two essential steps/modules: data acquisition and outlier detection, which involve how to acquire data with appropriate intervals and perform outlier analysis to output results of damage detection, respectively. Note that a sliding time window is applied to the strain monitoring data in this study, which has been proven to enable the procedure to iteratively calculate the above main modules, with less computational cost and more timely capture of structural damage presence [
39,
40]. A detailed description of the damage detection strategy is given in the subsequent implementation section.
The two-step approach for data interpretation refers to Steps 1 and 2 shown in
Figure 1. Step 1 performs a feature extraction procedure by the wavelet tool, allowing dynamic strain responses to be decomposed into frequency band components on the specific scales. The initial feature can be extracted in this step from an appropriate frequency band, thereby assisting data reduction and noise reduction. Step 2 adopts data-driven, i.e., unsupervised multivariate statistical tools to deal with the initial features obtained from Step 1 for decoupling the effects of operating loads and structural damage. As a result, the local and global DI values corresponding to data-driven methodologies are calculated, sensitive to local damages but insensitive to operating loads. The rationales of the methods for Step 1 and Step 2 are described next.
2.1. Wavelet-Based Signal Feature
The wavelet theory provides a time–frequency analysis tool for both stationary and nonstationary signals. One of the main goals of wavelet analysis is to extract useful information from raw data, such as signal features and image edges. Based on wavelet multiscale decomposition, one vibration signal can be characterized as many sequences with different levels and frequencies without losing any components. For example, bridge strain monitoring data can be conveniently decomposed into approximate and detailed components [
29], separating quasi-static and dynamic strains. In this paper, the wavelet packet tool quantifies the strain sequence into finer frequency components level by level for reconstruction. Our signal modeling proceeds very much in the same way as early theoretical documents, which were initially proposed by Mallat [
45] and later developed by Meyer [
46]. Therefore, we briefly describe the filtering results as follows:
A segment of strain sequence at the
ith sensor channel, namely
, can be equally divided into
sub-frequency bands at the
jth decomposition level in terms of the wavelet packet.
can thus be reconstructed as
To provide a way of characterizing dynamics in the vicinity of sensor , we chose one of the sub-band sequences in Equation (1) for analysis. The determination of the sub-frequency band should follow two principles. First, as far as the low-pass filtering, i.e., denoising, is concerned, the sub-band sequence should be in the lower-frequency range. Furthermore, the selection of frequency band should be according to the maximum energy rule, because the maximum response amplitudes (energy) often lie on the frequency band where the dominant operating loads apply or the natural frequencies of the structure.
Consequently, at the
jth decomposition level, we can extract the energy feature of the chosen sub-frequency band sequence
in the raw strain monitoring data, namely wavelet packet energy strain or WPES for short and given by:
where
represents the Euclidean norm of the sub-band sequence. Equation (2) is also understood as the root mean square of the sub-band sequence
.
The WPES defined in this study involves a segment of strain sequence, and it is associated with both operating loads and structural intrinsic characteristic. Therefore, the feature extraction in this step only plays a role in data reduction and noise reduction but not damage alert, thus called the initial feature extraction (Step 1 in
Figure 1). In addition, selecting an appropriate decomposition level is not so critical, as we may be analyzing strain monitoring data consisting of a large volume of data segments, including baseline data. Different decomposition levels
can be observed in these baseline data to obtain stable results when determining the sub-frequency band
.
2.2. Data-Driven Methodologies
2.2.1. PCA
PCA methodology puts a way to reveal the relationship between the time-varying factors and the multivariate features extracted from SHM data [
36,
37,
38,
39]. The main operation of PCA is to maximize the variance of the orthogonal projection of the original data set if each dimension of the data set follows an independent Gaussian distribution. A brief description of the theory of PCA, for completeness, is presented in this section. Additionally, the reader can be asked to refer to References [
47,
48] on this topic.
In this decoupling step, we use a minor variation of the moving PCA’s procedure [
39]. Specifically, in our procedure, we define the WPES as the initially extracted feature under operating loads and make the WPES data set, instead of quasi-static strain, lay a foundation for the DI calculations. For the sake of simplicity, let us use the generic
to represent the data set WPES.
If is the data set with variables (dimensions) and observations (), the operation of the maximization of variance mentioned above could be deducted to be equivalent to solving the eigenvalues and eigenvectors of the covariance matrix of . These eigenvectors are the basis vectors used for orthogonal projection, also known as the principal components or the principal component directions.
Meanwhile, the covariance matrix of
is equal to
, where
is the sample mean of
with each of its columns centered. Computationally, the calculation of principal components can also be performed by a Singular Value Decomposition (SVD):
where
and
are the unitary matrices comprising with left and right singular vectors, respectively, and obviously the right singular vectors are the above eigenvectors, i.e., principal component directions;
is a matrix of
rows and
columns but with
diagonal elements
(
), in which
is called the singular value. Hence, the projected data on the principal component space is
According to the cumulative contribution of variance, PCA takes the first
columns of
to account for the dominant time-varying factors from Equation (4), i.e.,
where
is the projected data set or so-called principal scores in which the
is orthogonally projected on a
d-dimensional hyper-plane, i.e., a new subspace. The selection of an appropriate dimension
is usually an issue needing attention. The left graph of
Figure 2 instances a typical PCA dealing with two sets of sensor data considering both undamaged and damaged states. The variations of sensor data versus a dominant factor follows the positive linear correlation in the undamaged state, thereby in the sense of this case,
is equal to 1. Then, the damage initiation will change the previous relation so that it is possible to distinguish different states by the variations of the principal components.
However, when using PCA to analyze multivariate SHM data sets, the truncation order
will be more challenging to select. For example, the relationship between multivariate quasi-static strains and temperatures is likely to be complicated, and there may be multiple dominant factors. On the other hand, short-term dynamic strain responses are dominantly rendered by the operating loads such as traffic, train-bridge coupled excitation, or wind on large-scale flexible structures. As far as current studies [
35,
44] have also shown, the amplitude of the dynamic responses of a bridge structure under a single train load is virtually independent of temperature. Therefore, the dominant factor in the dynamic response at a small timescale is almost unique. In this sense, the value of the truncation order
is supposed to be 1.
As preceded by this section, PCA can then be used to process the multivariate WPES data set, and meanwhile, the latent variable reflects the embedded relation between the dominant factor in operating loads and the WPES features. In terms of Equation (5) and
, the first principal component, i.e., the first eigenvector
, represents the latent variable under operational conditions. Each element in the eigenvector corresponds to strain observations at a particular sensor location, i.e., a particular column of the WPES matrix. We thus define the element
in
as the local DI values, i.e.,
The corresponding global indicator is the Euclidean norm of
, i.e.,
2.2.2. LSP
This section presents another data-driven methodology that both the PCA and the low-rank property of the data structure [
16,
17] can use. Instead of using the multivariate statistical tool, our method is, to some extent, based on the low-rank property to treat pairs of initial feature data to construct the new feature. The advantage of our method is that the prejudgment of the truncation order
for the multivariate statistics, i.e., the number of the dominant factors in operating loads, is not required. More details on this are given below.
Figure 2 shows the two sets (or named a pair) of feature data in which the two-dimensional PCA is executed. Since the projection data
in the first principal component direction retains the dominant factor of the original data set
, the first principal subspace where the projection is located is low-rank (the superscript of
represents the main subspace of the projection, and the rank is supposed to be 1 herein). It can be stated that the damage presence enables the data to not follow the low-rank subspace structure. The projection data
in the second principal subspace will change significantly from the undamaged to the damaged state, as shown in the right graph of
Figure 2. The damage alert can be raised, because the change trend of
is not sensitive to the dominant factors but sensitive to structural damage in the vicinity of the
ith or
kth sensor.
Usually, several strain observations are obtained, and the WPES feature data can be extracted. Accordingly, we list the corresponding projection data in the second principal subspace, i.e.,
in a matrix form at a particular sensor location
:
where
is the second principal subspace projection matrix corresponding to the
ith strain sensor. The matrix
is calculated by the two sets of strain-based feature data in pairs rather than using multivariate statistical analysis. Consequently, we use the variances to characterize the variability of the projection data in the second principal subspace, i.e., representing the variation from the anterior low-rank property, hence denominating the vector forming by the column variances of the matrix
as the low-rank subspace projection (LSP) vector:
We define the expectation of
, i.e.,
as a local DI for a particular strain observation (sensor location), i.e.,
The corresponding global indicator is defined as the Euclidean norm of the vector consisting of
, i.e.,
2.3. Implementation
As outlined in
Figure 1, there are totally four functional steps/modules to execute the damage detection algorithm. Data acquisition module provides the basis for two-step data processing approach. A strain acquisition system can obtain structural dynamic strain responses under operational conditions with a sufficient dynamic sampling capability, e.g., using the packaged Fiber Bragg Grating (FBG) sensors with appropriate gauge lengths and their demodulation devices [
26,
28]. The sampling interval should be in the order of milliseconds, and the sampling frequency may be taken as around 200 or 500 Hz based on the actual structural vibration conditions and Nyquist sampling theory.
It is not easy to directly measure operational loads such as traffic, train-bridge-coupled excitation, or complex current fields. Therefore, only the dynamic components in strain monitoring data are imported in chronological order in the data acquisition module. The imported data should be short-term, i.e., second-order, but not necessarily continuous, and could be obtained through multi-resolution analysis of the raw strain monitoring data [
29]. We employ sliding time windows, i.e., processing these data, at appropriate short windows and equal intervals to reduce computational cost and capture time of damage presence. The window size should be at least twice of the periodic variability [
39]. The following formula denotes the window size
:
where
is the same as the definition in Equation (2), which is the length of one strain sequence required for the initial feature (i.e., WPES) extraction. For example, for the bridge strain responses due to the train vibration load,
can be taken to be greater than the duration of each train passing, and
is the number of observations of train passing to form the WPES data set. In addition, the dimension of the WPES data set is denoted as
, which refers to the number of effective strain sensors deployed in the associated structure or substructure.
The subsequent two key steps are implemented in each sliding time window. The window is updated iteratively through each moving with length. According to the above rationale sections, two optional data-driven methodologies are adopted and denominated as WPES-based PCA (or named PCA for short) and WPES-based LSP (or named LSP for short) methods, respectively. The proposed two-step approach is described as follows:
For the purpose of damage detection, an outlier analysis is performed to classify between the undamaged and damaged states after the global DI values are obtained. Outlier analysis usually encompasses comparing global DI values to a set of control limits that are defined by the threshold based on the reference/baseline data obtained from the undamaged state. In general, the threshold is set to three times of standard deviation of the baseline data that should be determined in advance. Any future observations of global DI values outside the threshold () can then be labeled as the one obtained from the damaged state. Meanwhile, once the damage alert is raised, the corresponding local DI values can be output the result—that is, the location of a strain sensor in the vicinity of which an abnormality occurs.
3. Experiment Design and Process
In laboratory, a reaction frame system shown in
Figure 3a was customized to verify the proposed approach. A steel truss comprising 10 joints and 17 elements/rods was fabricated by approximately simulating a part of a truss bridge and fixed on the reaction system tightly with the four of the joints. The truss joints employ the pin–shaft connection and consist of roller bearings to maintain the free-rotating capability. Each joint has four roller-bearings in series for the mass consistent, as shown in
Figure 3a in detail. The truss element/rod with a diameter of 5 mm has threaded connections with the roller bearings at its ends. We chose such ways of connections of joints on account of the fact that there would be only two force rods but no secondary stress in the truss structure. The length between the centers of two roller bearings is 200 mm of the horizontal and vertical elements, as well as 283 mm of all diagonal elements.
An air-actuated piston shaker was recruited for this vibration test, as shown in
Figure 3a. The equipment allows to output axial motion in a particular force range, and although the force is uncontrollable, the output axial displacement is measurable by a linear variable differential transformer sensor and its signal amplifier and AD converter. Thus, by having the use of the air-actuated piston shaker, we were able to provide a series of vertical random excitations to simulate the short-term operating loads on the truss structure. For example, the excitations can be applied at node 5, as shown in the model sketch of
Figure 4, plus four nodes with constrained ends to avoid the torsion effects caused by the out-plane motion.
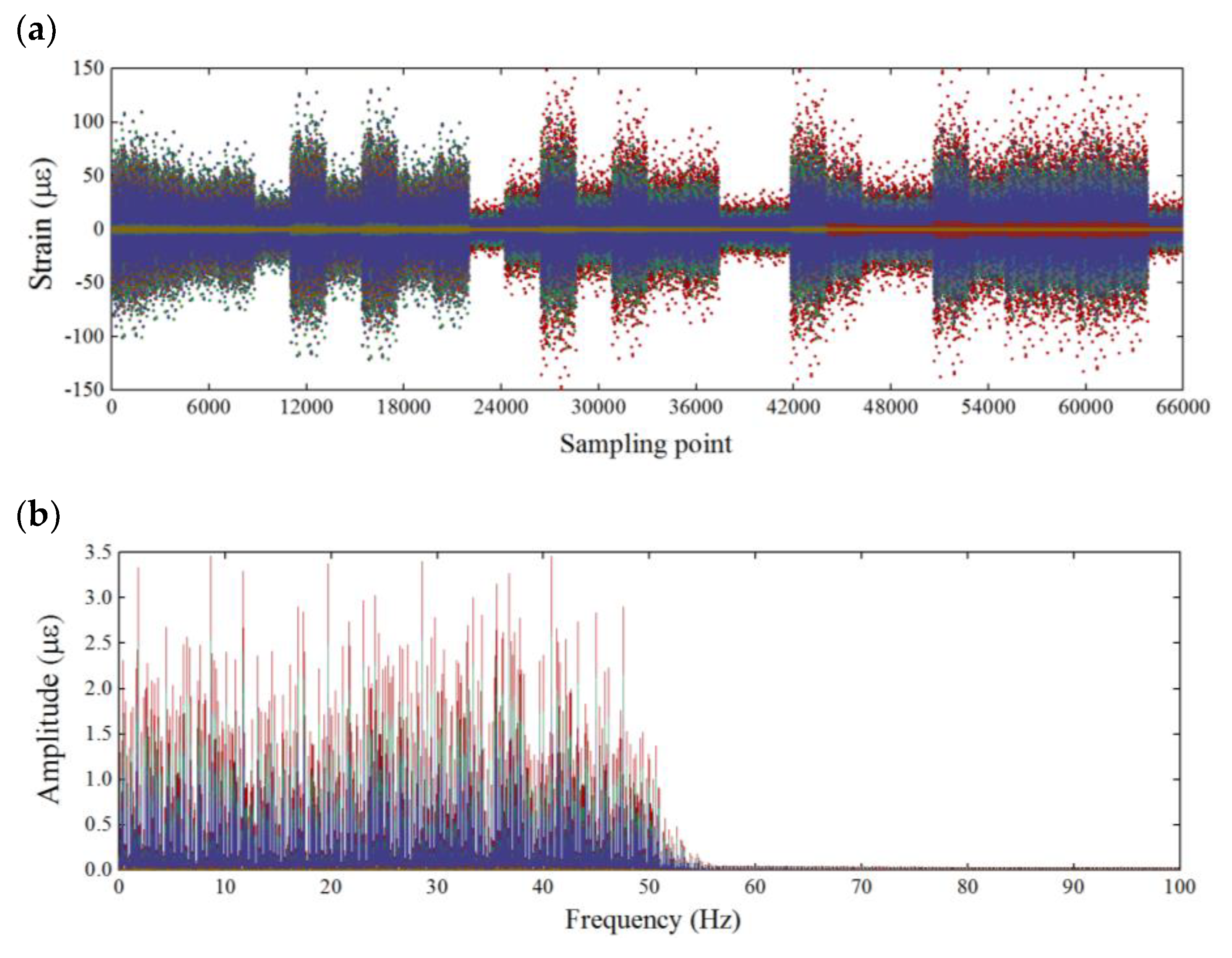
During the experiments, the axial strains of all 15 stressed elements were measured by FBG sensors. The FBGs adhered to the rod’s middle and connected to the demodulator via the transmission fiber for synchronous data collection. The demodulator adopted was Model TFBGD-9000 (Harbin, China), as shown in
Figure 3b, with a sampling rate of 200 Hz. Moreover, due to the adoption of the feature extraction step to reduce data of each sensor channel in the same excitation period, completely synchronized data collection is not necessary. Thus, in practice, the multivariate strain monitoring data can also be record asynchronously through multiple demodulation devices or channels.
Additionally, what we know about the difference between sensor temperature compensation and structural thermal effect is great in terms of the data processing in situ, although environmental temperature variations cause both. The former is because the temperature affects the central wavelength of the optical fiber sensor probe, which is an adverse impact that must be eliminated or can be easily eliminated. The latter is one of the problems to be solved urgently in SHM field, which leads to a perceptible quasi-static response of the structural component and should be accounted for to avoid masking the effects caused by structural damage. Since the time domain response of each excitation is short and the excitation starts from the zero equilibrium, there is no need to perform temperature compensation of the sensor. In addition, it was stated in the Introduction, existing studies have shown that the thermal effect has no significant impact on the vibration responses on a small timescale.
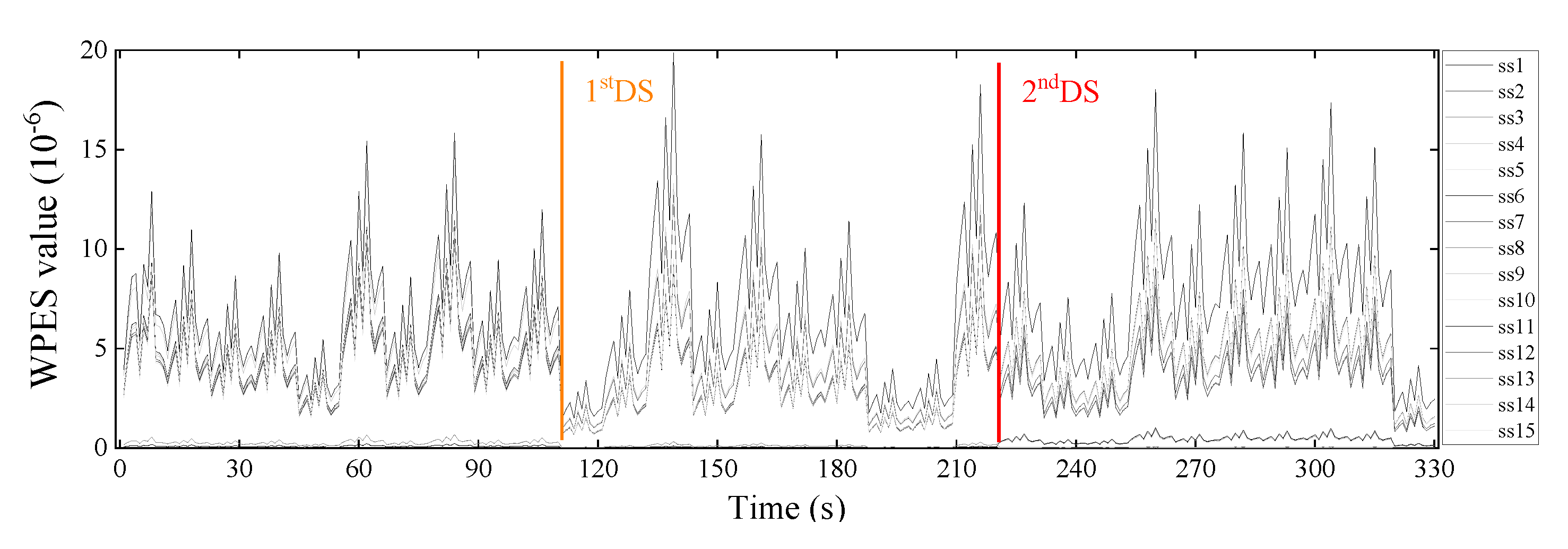
The damage was approximately simulated by a decrease in the cross-sectional dimensions of an element. As shown in
Figure 4, Elements 6 and 15 were set as damaged elements that were replaced by a 4-mm rod. The first damage scenario (1st DS) starts once Element 6 was replaced with a lower stiffness rod at a certain excitation, and the second damage scenario (2nd DS) occurred when Element 15 was also replaced with a low stiffness rod at a subsequent excitation. That means, during the experiment, the truss structure underwent an evolution from an undamaged state to a single-damage state and then to the next damage state. Taking into account the performance of the exciter itself, we turned on each independent excitation for about 20 s and then cut them all into 11 s. A total of 30 independent excitations are selected to acquire dynamic strain response data. Among them, the first ten times correspond to the undamaged state of the truss structure, the medium ten times correspond to the first damage state and the last ten times correspond to the second damage state.
5. Conclusions
This paper presents a damage detection strategy based on data-driven modeling of the raw strain monitoring data. The key goal of the strategy is to develop a two-step approach to successively processing the short-term dynamic strain data in the fixed-size sliding time window and to decoupling structural damages and masking effects from operating loads in initial strain-based feature data (WPES). An experimental truss was customized with an emphasis on simulating time-varying operating loads through continuous random excitations. The proposed two-step approach’s feasibility and robustness were substantiated by analyzing experimental data under different damage scenarios.
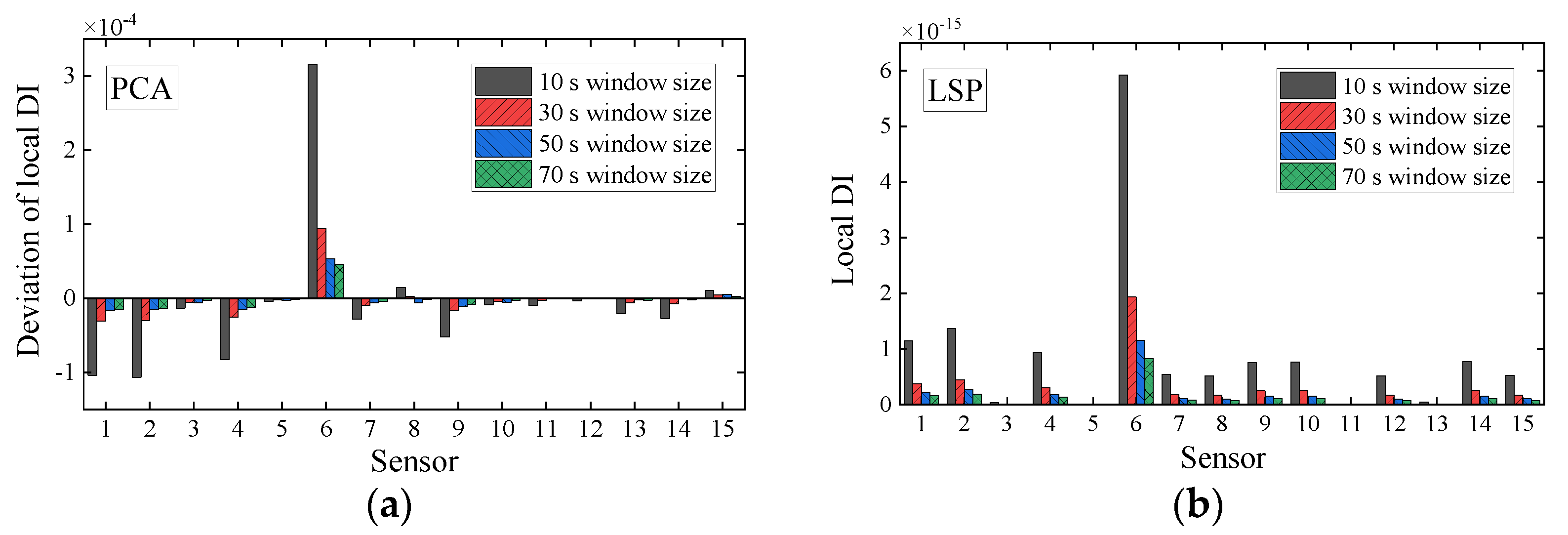
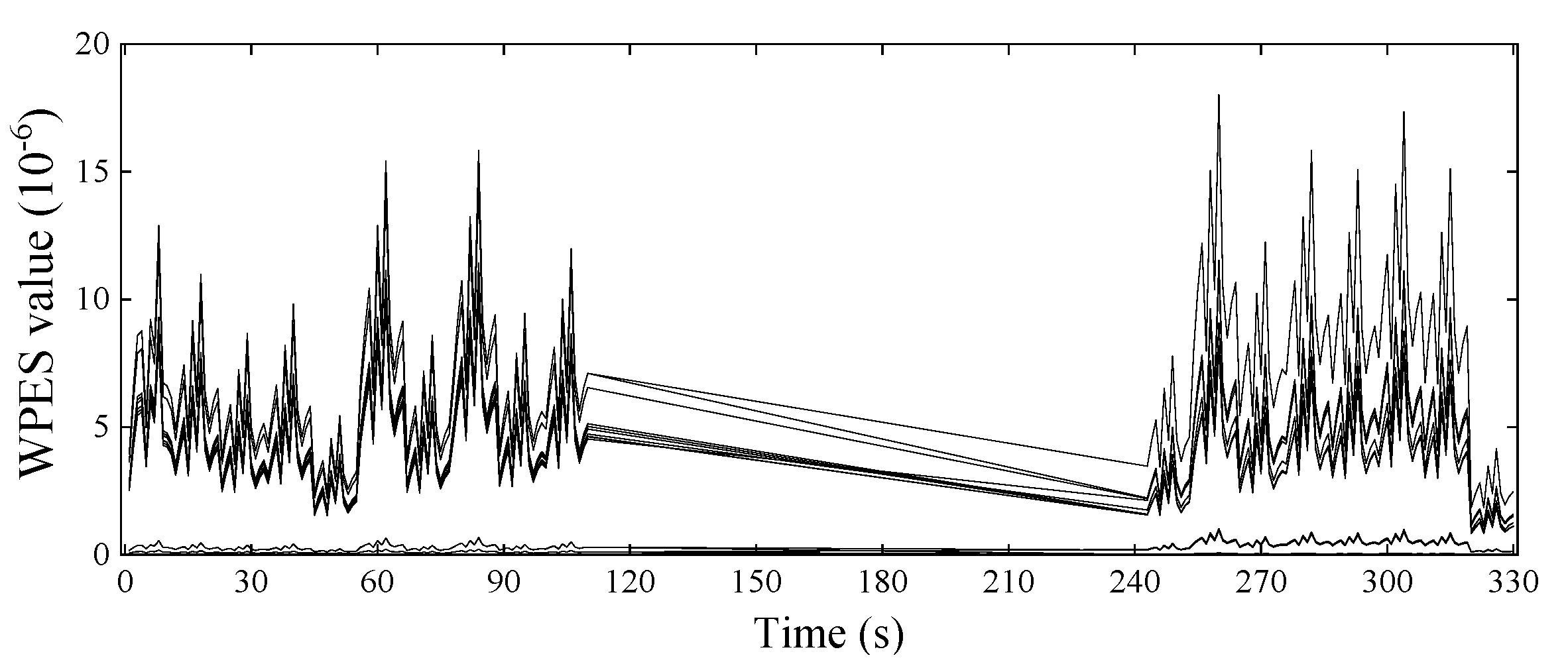
The results have shown that both data-driven methodologies (PCA and LSP) in the decoupling step can perform well in detecting the damage presences through the corresponding global DI. Meanwhile, these DI values can return to a new stable state after damage alert to detect further damages. Nevertheless, in terms of DIs for local damage identification, it appears that the performance of damage localization based on the LSP rationale is better than that based on PCA. Unlike the PCA indicator, the low-rank property of the DI by LSP makes appear the fluctuations between approximately zeros and spikes when identifying local damages, thus making it independent of the baseline. Furthermore, the robustness of the proposed approach was preliminarily demonstrated in the experiment to accommodate situations when different sliding time windows were employed, measurements were missing entirely, and measuring points were limited.
From the SHM prospective, finding an indicator that is not sensitive to the effects of environmental and operational conditions and related only to the changes of structural parameters such as local stiffness is a critical part of achieving unsupervised structural condition assessment. Long-term environmental factors (e.g., temperature and humidity) have quite complex correlations with the strain/stress time variations, making it difficult to account for or eliminate them. Conversely, this work analyzed small time-scale structural events, i.e., the dynamic strain responses under short-term operating loads. The well-defined structural behavior thus permitted that the proposed approach could split the damage effects from the external load ones once the damage initiates, and at the same time, the low-rank property-based unsupervised machine learning tool should be a renewed valuable aid for splitting between the damage and masking effects. In addition, the data set in this study might be restricted by a series of single loadings in the experiment, so we are currently investigating the generalized frame from our two-step approach for more practical cases, such as strain responses obtained from the train-bridge interaction system.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}