
Photo-Realistic Image Dehazing and Verifying Networks via Complementary Adversarial Learning


Abstract
:1. Introduction
2. Related Works
2.1. Physical Haze Model-Based Dehazing
2.2. Radiance-Based Dehazing
2.3. Adversarial Learning
3. Proposed Method
3.1. Data Generation
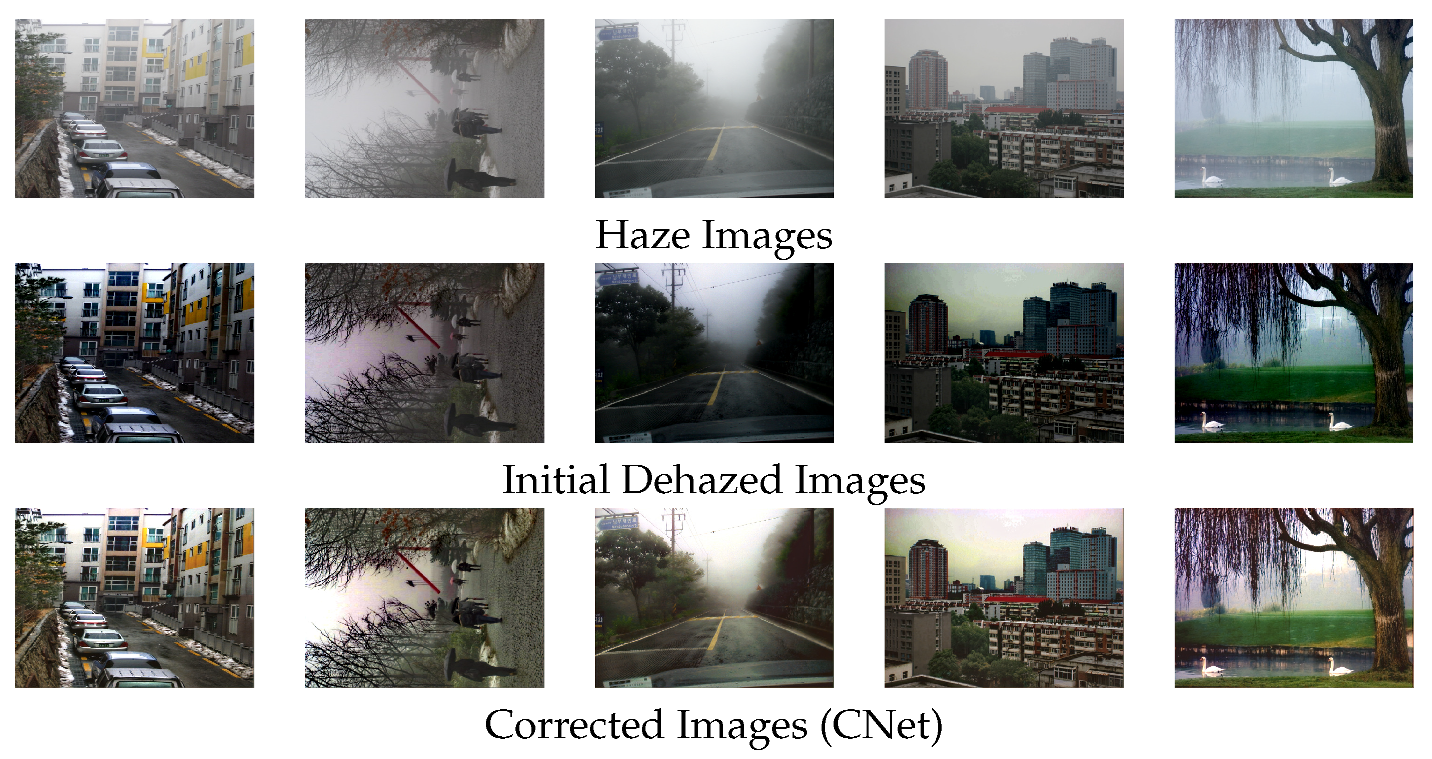
3.2. Correction-Network (CNet)
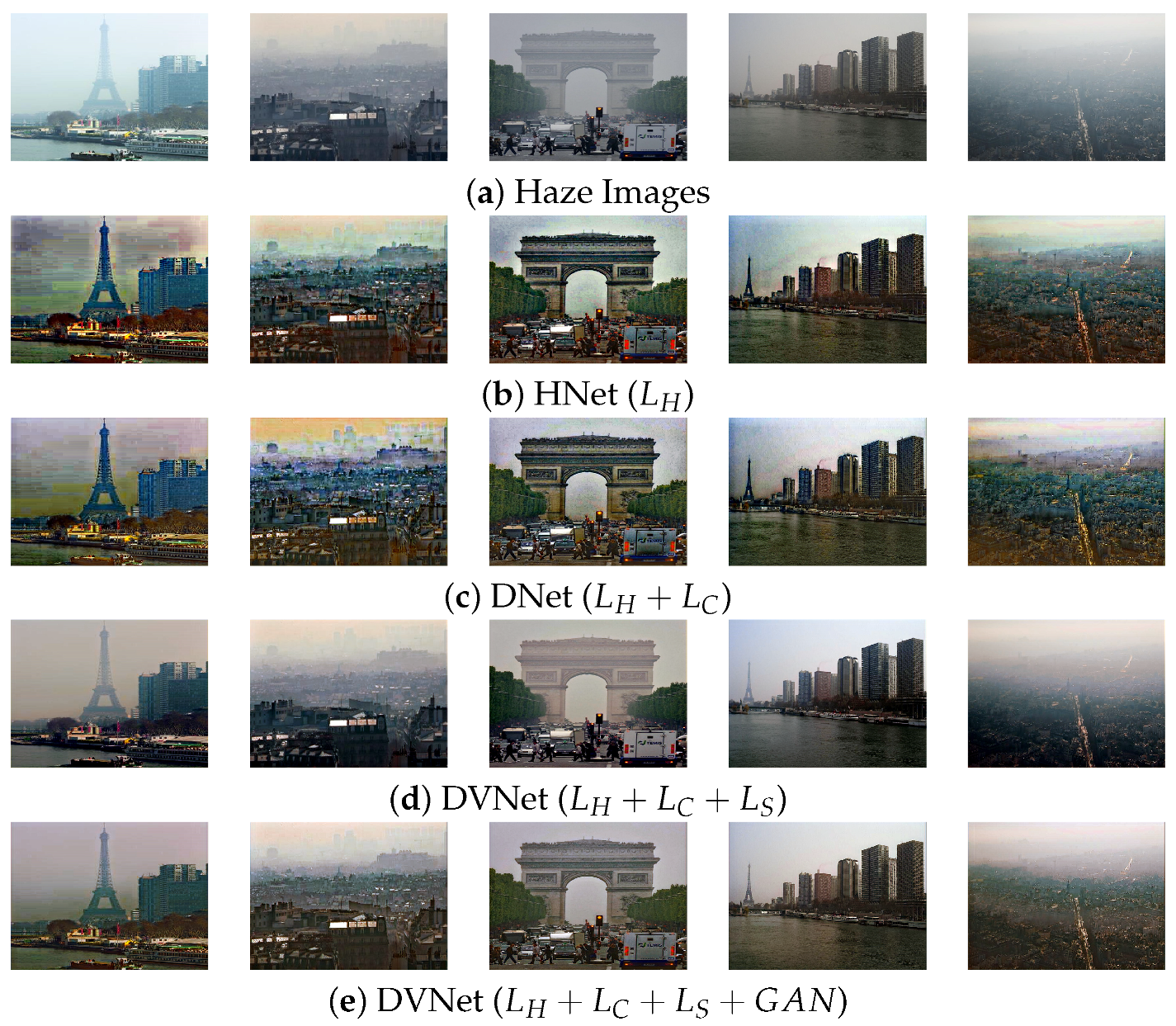
3.3. Haze-Network (HNet)
3.4. Verifying Network
| Algorithm 1: Training procedures of the proposed DVNet |
| Input:, , Output: for iteration from 1 to 15 K do 1: [features, ] = HNet(, ) 2: = CNet(, features, ) 3: = VNet(, , ) 4: = Discriminator(, , , , ) 5: update model by minimizing (14) + (12) 6: update model by minimizing (15) 7: update model by minimizing (16) 8: update model by minimizing (17) end for |
| Algorithm 2: Testing procedures of the proposed DVNet |
| Input:, Output: 1: = HNet(, ) |
3.5. Implementation
4. Experimental Results
4.1. Similarity Evaluation
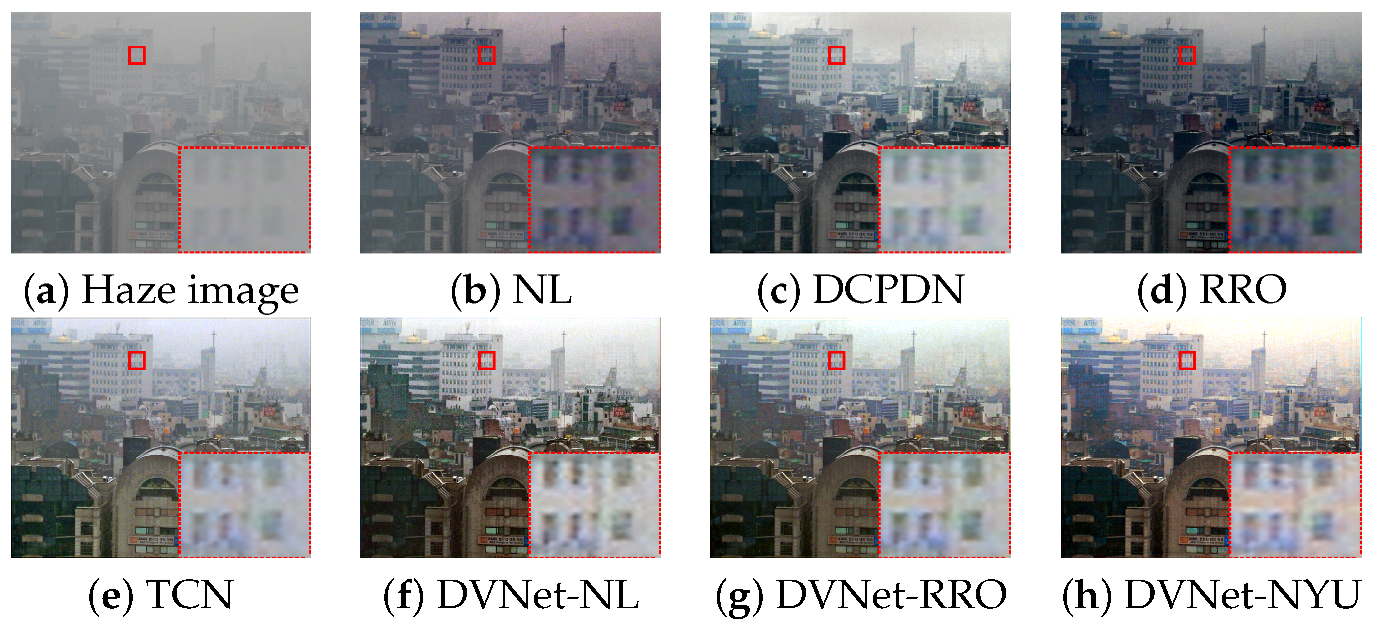
4.2. Visual Qaulity Assessment
4.3. Additional Study
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Optimal Parameters
References
- Shin, J.; Koo, B.; Kim, Y.; Paik, J. Deep Binary Classification via Multi-Resolution Network and Stochastic Orthogonality for Subcompact Vehicle Recognition. Sensors 2020, 20, 2715. [Google Scholar] [CrossRef]
- Kim, Y.; Shin, J.; Park, H.; Paik, J. Real-Time Visual Tracking with Variational Structure Attention Network. Sensors 2019, 19, 4904. [Google Scholar] [CrossRef] [Green Version]
- Jeon, J.; Yoon, I.; Kim, D.; Lee, J.; Paik, J. Fully digital auto-focusing system with automatic focusing region selection and point spread function estimation. IEEE Trans. Consum. Electron. 2010, 56, 1204–1210. [Google Scholar] [CrossRef]
- Im, J.; Jeon, J.; Hayes, M.H.; Paik, J. Single image-based ghost-free high dynamic range imaging using local histogram stretching and spatially-adaptive denoising. IEEE Trans. Consum. Electron. 2011, 57, 1478–1484. [Google Scholar] [CrossRef]
- Middleton, W.E.K. Vision through the Atmosphere; University of Toronto Press: Toronto, ON, Canada, 1952. [Google Scholar]
- Schechner, Y.Y.; Narasimhan, S.G.; Nayar, S.K. Instant dehazing of images using polarization. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Kauai, HI, USA, 8–14 December 2001. [Google Scholar]
- Narasimhan, S.G.; Nayar, S.K. Contrast restoration of weather degraded images. IEEE Trans. Pattern Anal. Mach. Intell. 2003, 25, 713–724. [Google Scholar] [CrossRef] [Green Version]
- Oakley, J.P.; Satherley, B.L. Improving image quality in poor visibility conditions using a physical model for contrast degradation. IEEE Trans. Image Process. 1998, 7, 167–179. [Google Scholar] [CrossRef]
- Narasimhan, S.G.; Nayar, S.K. Interactive (de) weathering of an image using physical models. In Proceedings of the IEEE Workshop on Color and Photometric Methods in Computer Vision, Nice, France, 12 October 2003; Volume 6, p. 1. [Google Scholar]
- Fattal, R. Single image dehazing. ACM Trans. Graph. 2008, 27, 72. [Google Scholar] [CrossRef]
- Jeong, K.; Song, B. Fog Detection and Fog Synthesis for Effective Quantitative Evaluation of Fog–detection-and-removal Algorithms. IEIE Trans. Smart Process. Comput. 2018, 7, 350–360. [Google Scholar] [CrossRef]
- Shin, J.; Park, H.; Park, J.; Ha, J.; Paik, J. Variational Low-light Image Enhancement based on a Haze Model. IEIE Trans. Smart Process. Comput. 2018, 7, 325–331. [Google Scholar] [CrossRef]
- Ha, E.; Shin, J.; Paik, J. Gated Dehazing Network via Least Square Adversarial Learning. Sensors 2020, 20, 6311. [Google Scholar] [CrossRef] [PubMed]
- He, K.; Sun, J.; Tang, X. Single image haze removal using dark channel prior. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 2341–2353. [Google Scholar] [PubMed]
- Berman, D.; Avidan, S. Non-local image dehazing. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 1674–1682. [Google Scholar]
- Shin, J.; Kim, M.; Paik, J.; Lee, S. Radiance–Reflectance Combined Optimization and Structure-Guided ℓ0-Norm for Single Image Dehazing. IEEE Trans. Multimed. 2020, 22, 30–44. [Google Scholar] [CrossRef]
- Chen, Y.; Lai, Y.K.; Liu, Y.J. CartoonGAN: Generative Adversarial Networks for Photo Cartoonization. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 9465–9474. [Google Scholar]
- Yu, F.; Koltun, V. Multi-scale context aggregation by dilated convolutions. arXiv 2015, arXiv:1511.07122. [Google Scholar]
- Shamsolmoali, P.; Zareapoor, M.; Zhang, J.; Yang, J. Image super resolution by dilated dense progressive network. Image Vis. Comput. 2019, 88, 9–18. [Google Scholar] [CrossRef]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Cai, B.; Xu, X.; Jia, K.; Qing, C.; Tao, D. Dehazenet: An end-to-end system for single image haze removal. IEEE Trans. Image Process. 2016, 25, 5187–5198. [Google Scholar] [CrossRef] [Green Version]
- Ren, W.; Liu, S.; Zhang, H.; Pan, J.; Cao, X.; Yang, M.H. Single image dehazing via multi-scale convolutional neural networks. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; pp. 154–169. [Google Scholar]
- Silberman, N.; Hoiem, D.; Kohli, P.; Fergus, R. Indoor segmentation and support inference from rgbd images. In Proceedings of the European Conference on Computer Vision, Florence, Italy, 7–13 October 2012; pp. 746–760. [Google Scholar]
- Li, B.; Peng, X.; Wang, Z.; Xu, J.; Dan, F. AOD-Net: All-in-One Dehazing Network. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017. [Google Scholar]
- Zhang, H.; Patel, V.M. Densely connected pyramid dehazing network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018. [Google Scholar]
- Mirza, M.; Osindero, S. Conditional Generative Advarsarial Nets. arXiv 2014, arXiv:1411.1784. [Google Scholar]
- Choi, L.; Yu, J.; Conrad, V.A. Referenceless Prediction of Perceptual Fog Density and Perceptual Image Defogging. IEEE Trans. Image Process. 2015, 24, 3888–3901. [Google Scholar] [CrossRef] [PubMed]
- Chen, Q.; Xu, J.; Koltun, V. Fast image processing with fully-convolutional networks. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; Volume 9, pp. 2516–2525. [Google Scholar]
- Ren, W.; Ma, L.; Zhang, J.; Pan, J.; Cao, X.; Liu, W.; Yang, M. Gated Fusion Network for Single Image Dehazing. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018; pp. 3253–3261. [Google Scholar] [CrossRef] [Green Version]
- Shin, J.; Park, H.; Paik, J. Region-Based Dehazing via Dual-Supervised Triple-Convolutional Network. IEEE Trans. Multimed. 2021. [Google Scholar] [CrossRef]
- Duda, R.O.; Hart, P.E. Pattern classification and scene analysis. In A Wiley-Interscience Publication; Wiley: New York, NY, USA, 1973. [Google Scholar]
- Levin, A.; Lischinski, D.; Weiss, Y. A closed form solution to natural image matting. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, New York, NY, USA, 17–22 June 2006; Volume 1, pp. 61–68. [Google Scholar]
- Farbman, Z.; Fattal, R.; Lischinski, D.; Szeliski, R. Edge-preserving decompositions for multi-scale tone and detail manipulation. ACM Trans. Graph. 2008, 27, 67. [Google Scholar] [CrossRef]
- Liu, Z.; Xiao, B.; Alrabeiah, M.; Wang, K.; Chen, J. Single Image Dehazing with a Generic Model-Agnostic Convolutional Neural Network. IEEE Signal Process. Lett. 2019, 26, 833–837. [Google Scholar] [CrossRef]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial nets. Adv. Neural Inf. Process. Syst. 2014, 27, 2672–2680. [Google Scholar]
- Mao, X.; Li, Q.; Xie, H.; Lau, R.Y.; Wang, Z.; Smolley, S.P. Least squares generative adversarial networks. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2813–2821. [Google Scholar]
- Ouyang, Y. Total variation constraint GAN for dynamic scene deblurring. Image Vis. Comput. 2019, 88, 113–119. [Google Scholar] [CrossRef]
- Maas, A.L.; Hannun, A.Y.; Ng, A.Y. Rectifier nonlinearities improve neural network acoustic models. In Proceedings of the ICML, Atlanta, GA, USA, 16–21 June 2013; Volume 30, p. 3. [Google Scholar]
- Ioffe, S.; Szegedy, C. Batch normalization: Accelerating deep network training by reducing internal covariate shift. arXiv 2015, arXiv:1502.03167. [Google Scholar]
- Huang, G.; Liu, Z.; van der Maaten, L.; Weinberger, K.Q. Densely Connected Convolutional Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 2261–2269. [Google Scholar]
- Johnson, J.; Alahi, A.; Fei-Fei, L. Perceptual losses for real-time style transfer and super-resolution. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; pp. 694–711. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Russakovsky, O.; Deng, J.; Su, H.; Krause, J.; Satheesh, S.; Ma, S.; Huang, Z.; Karpathy, A.; Khosla, A.; Bernstein, M.; et al. Imagenet large scale visual recognition challenge. Int. J. Comput. Vis. 2015, 115, 211–252. [Google Scholar] [CrossRef] [Green Version]
- Agustsson, E.; Timofte, R. Ntire 2017 challenge on single image super-resolution: Dataset and study. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, Honolulu, HI, USA, 22–25 July 2017; Volume 3, p. 2. [Google Scholar]
- Li, B.; Ren, W.; Fu, D.; Tao, D.; Feng, D.; Zeng, W.; Wang, Z. Benchmarking Single-Image Dehazing and Beyond. IEEE Trans. Image Process. 2019, 28, 492–505. [Google Scholar] [CrossRef] [Green Version]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Codruta O., A.; Cosmin, A.; Radu, T.; Christophe De, V. I-HAZE: A dehazing benchmark with real hazy and haze-free indoor images. arXiv 2018, arXiv:1804.05091v1. [Google Scholar]
- Codruta O., A.; Cosmin, A.; Radu, T.; Christophe De, V. O-HAZE: A dehazing benchmark with real hazy and haze-free outdoor images. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshop (CVPRW), Salt Lake City, UT, USA, 18–22 June 2018. [Google Scholar]
- Li, Y.; You, S.; Brown, M.S.; Tan, R.T. Haze visibility enhancement: A Survey and quantitative benchmarking. Comput. Vis. Image Underst. 2017, 165, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Wang, Z.; Conrad, V.A.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sharma, G.; Wu, W.; Dalal, E.N. The CIEDE2000 Color-Difference Formula: Implementation Notes, Mathematical Observations. Color Res. Appl. 2005, 30, 21–30. [Google Scholar] [CrossRef]
- Mittal, A.; Soundararajan, R.; Bovik, A.C. Making a “Completely Blind” Image Quality Analyzer. IEEE Signal Process. Lett. 2013, 20, 209–212. [Google Scholar] [CrossRef]
- Hautière, N.; Tarel, J.P.; Aubert, D.; Dumont, E. Blind contrast enhancement assessment by gradient ratioing at visible edges. Image Anal. Stereol. 2011, 27, 87–95. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| input haze image | |
| result of the C-Net | |
| generated dehazed image using H-Net | |
| natural images for the VNet | |
| output of the VNet | |
| inintial dehazed image using NL or RRO or NYU |
| HNet | CNet |
|---|---|
| Input , | Input , |
| Conv(K3, R1, I3, O24), AN, lrelu | Conv(K3, R1, I3, O24), AN, lrelu |
| Concat | |
| Conv(K3, R1, I24, O24), AN, lrelu | Conv(K3, R1, I48, O24), AN, lrelu |
| Concat | |
| Conv(K3, R1, I24, O24), AN, lrelu | Conv(K3, R1, I48, O24), AN, lrelu |
| Concat | |
| Conv(K3, R2, I24, O24), AN, lrelu | Conv(K3, R2, I48, O24), AN, lrelu |
| Concat | |
| Conv(K3, R4, I24, O24), AN, lrelu | Conv(K3, R4, I48, O24), AN, lrelu |
| Concat | |
| Conv(K3, R8, I24, O24), AN, lrelu | Conv(K3, R8, I48, O24), AN, lrelu |
| Concat | |
| Conv(K3, R16, I24, O24), AN, lrelu | Conv(K3, R16, I48, O24), AN, lrelu |
| Concat | |
| Conv(K3, R1, I24, O24), AN, lrelu | Conv(K3, R1, I48, O24), AN, lrelu |
| Concat | |
| Conv(K3, R1, I24, O3) | Conv(K3, R1, I48, O3) |
| Output , | Output , |
| Discriminator |
|---|
| Input , , , |
| Conv (K3, R1, I3, O64), BN, lrelu |
| Conv (K3, R1, I64, O128), BN, lrelu |
| Conv (K3, R1, I128, O256), BN, lrelu |
| Conv (K3, R1, I256, O512), BN, lrelu |
| FC (I8192, O100), BN, lrelu |
| FC (I100, O2), Softmax |
| - | I-Haze | O-Haze | ||||
|---|---|---|---|---|---|---|
| Method | PSNR | SSIM | CIED | PSNR | SSIM | CIED |
| NL [15] | 16.00 | 0.7686 | 14.2 | 16.76 | 0.7842 | 16.61 |
| DCPDN [25] | 14.76 | 0.7758 | 15.76 | 13.20 | 0.7449 | 23.79 |
| RRO [16] | 14.96 | 0.7668 | 15.51 | 17.23 | 0.7813 | 16.51 |
| TCN [30] | 17.15 | 0.7921 | 14.04 | 15.47 | 0.7629 | 17.04 |
| DVNet-NL | 16.76 | 0.7985 | 13.62 | 15.18 | 0.7657 | 16.93 |
| DVNet-RRO | 17.08 | 0.8019 | 13.67 | 15.21 | 0.7707 | 17.31 |
| DVNet-NYU | 16.97 | 0.7907 | 13.81 | 15.03 | 0.7568 | 18.16 |
| Method | Input | NL | DCPDN | RRO | TCN | DVNet-NL | DVNet-RRO | DVNet-NYU |
|---|---|---|---|---|---|---|---|---|
| CNR | 129.41 | 149.03 | 138.27 | 148.16 | 148.16 | 154.29 | 147.56 | 151.06 |
| Entropy | 7.02 | 6.95 | 7.32 | 7.16 | 7.44 | 7.50 | 7.50 | 7.62 |
| NIQE | 19.31 | 18.53 | 18.88 | 18.63 | 19.21 | 18.57 | 18.69 | 18.52 |
| Saturation | 0.79 | 8.22% | 3.66% | 3.02% | 1.33% | 1.29% | 1.84% | 2.34% |
| Ablation Study | I-Haze | O-Haze | |||||
|---|---|---|---|---|---|---|---|
| HNet | CNet | DVNet | GAN | PSNR | SSIM | PSNR | SSIM |
| O | X | X | X | 15.91 | 0.6944 | 14.97 | 0.6799 |
| O | O | X | X | 16.38 | 0.6964 | 15.37 | 0.6776 |
| O | O | O | X | 16.28 | 0.7904 | 14.50 | 0.7519 |
| O | O | O | O | 16.76 | 0.7985 | 15.18 | 0.7657 |
| Width & Height Size | 256 | 512 | 768 | 1024 |
|---|---|---|---|---|
| DVNet (gpu) | 0.005 | 0.018 | 0.039 | 0.065 |
| TCN (gpu) | 0.01 | 0.05 | 0.18 | 0.74 |
| DCPDN (gpu) | - | 0.05 | - | - |
| RRO (cpu) | 0.71 | 2.42 | 4.91 | 8.30 |
| NL (cpu) | 3.13 | 3.71 | 4.71 | 6.80 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shin, J.; Paik, J. Photo-Realistic Image Dehazing and Verifying Networks via Complementary Adversarial Learning. Sensors 2021, 21, 6182. https://doi.org/10.3390/s21186182
Shin J, Paik J. Photo-Realistic Image Dehazing and Verifying Networks via Complementary Adversarial Learning. Sensors. 2021; 21(18):6182. https://doi.org/10.3390/s21186182
Chicago/Turabian StyleShin, Joongchol, and Joonki Paik. 2021. "Photo-Realistic Image Dehazing and Verifying Networks via Complementary Adversarial Learning" Sensors 21, no. 18: 6182. https://doi.org/10.3390/s21186182