
Plantar Pressure Detection System Based on Flexible Hydrogel Sensor Array and WT-RF

Abstract
:1. Introduction
2. Materials and Methods
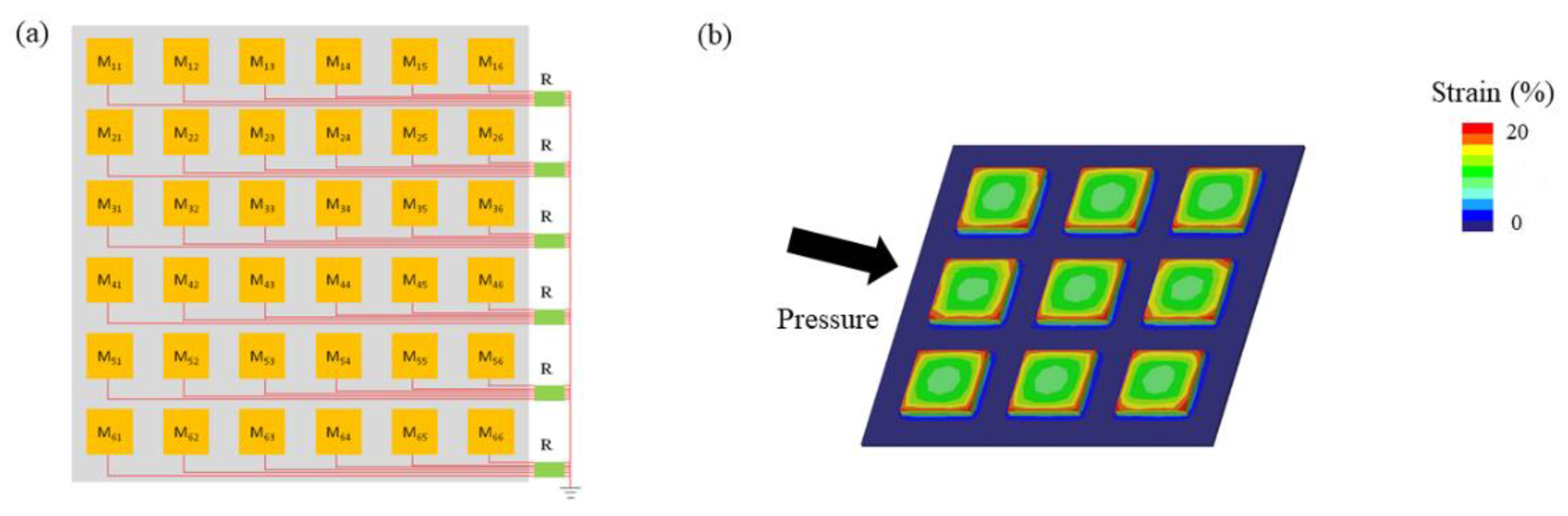
2.1. Design of Flexible Hydrogel Sensor Array
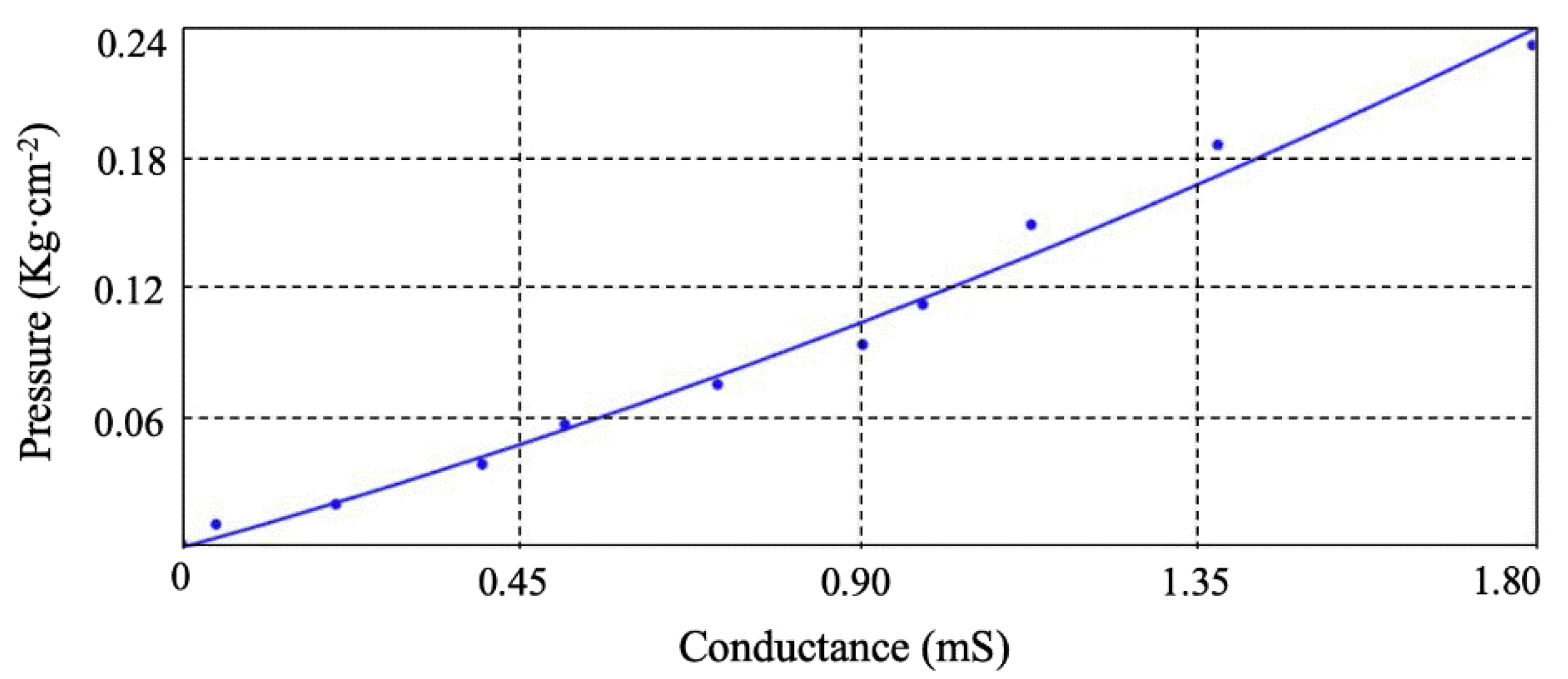
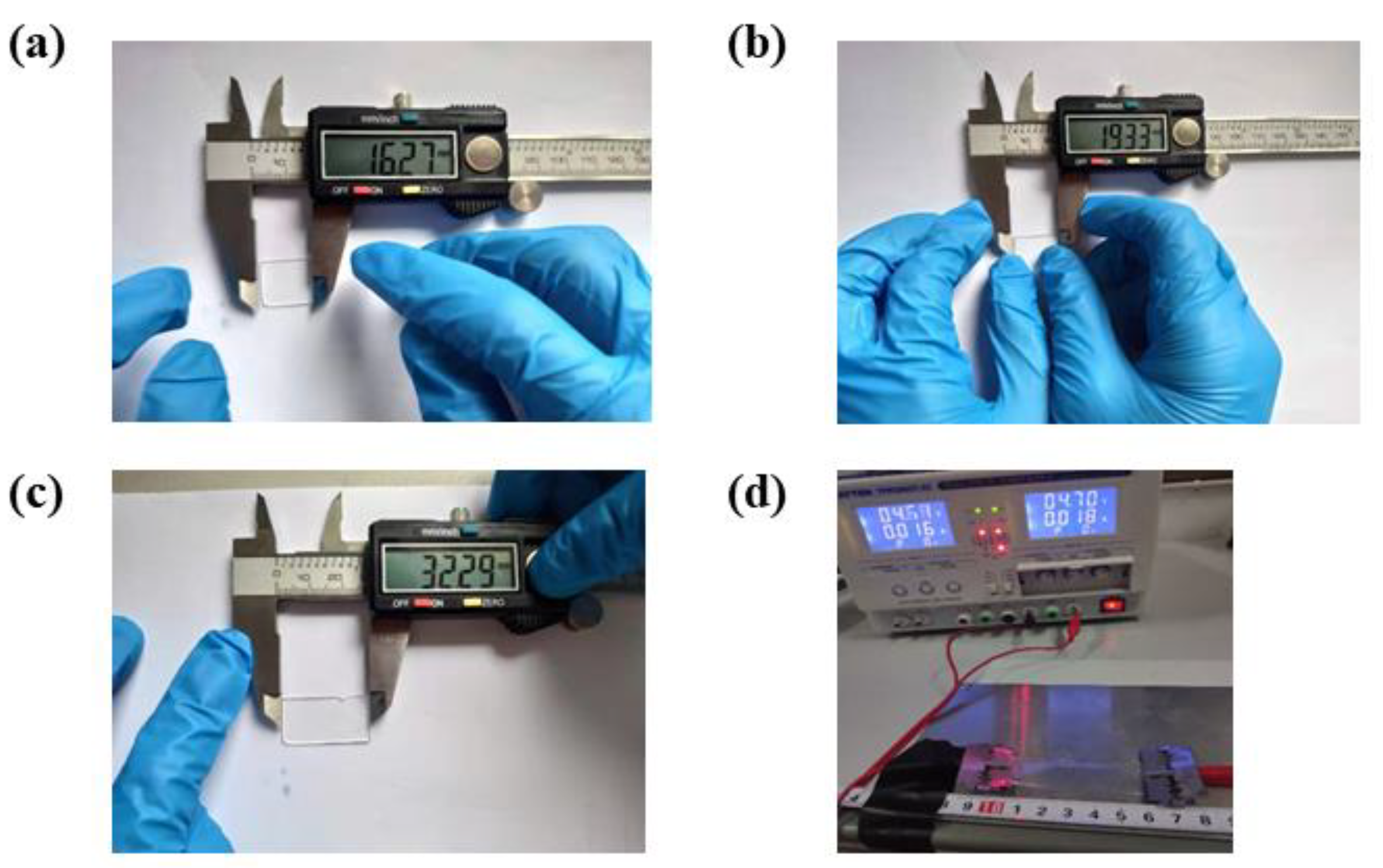
2.2. Sensor Fabrication and Calibration
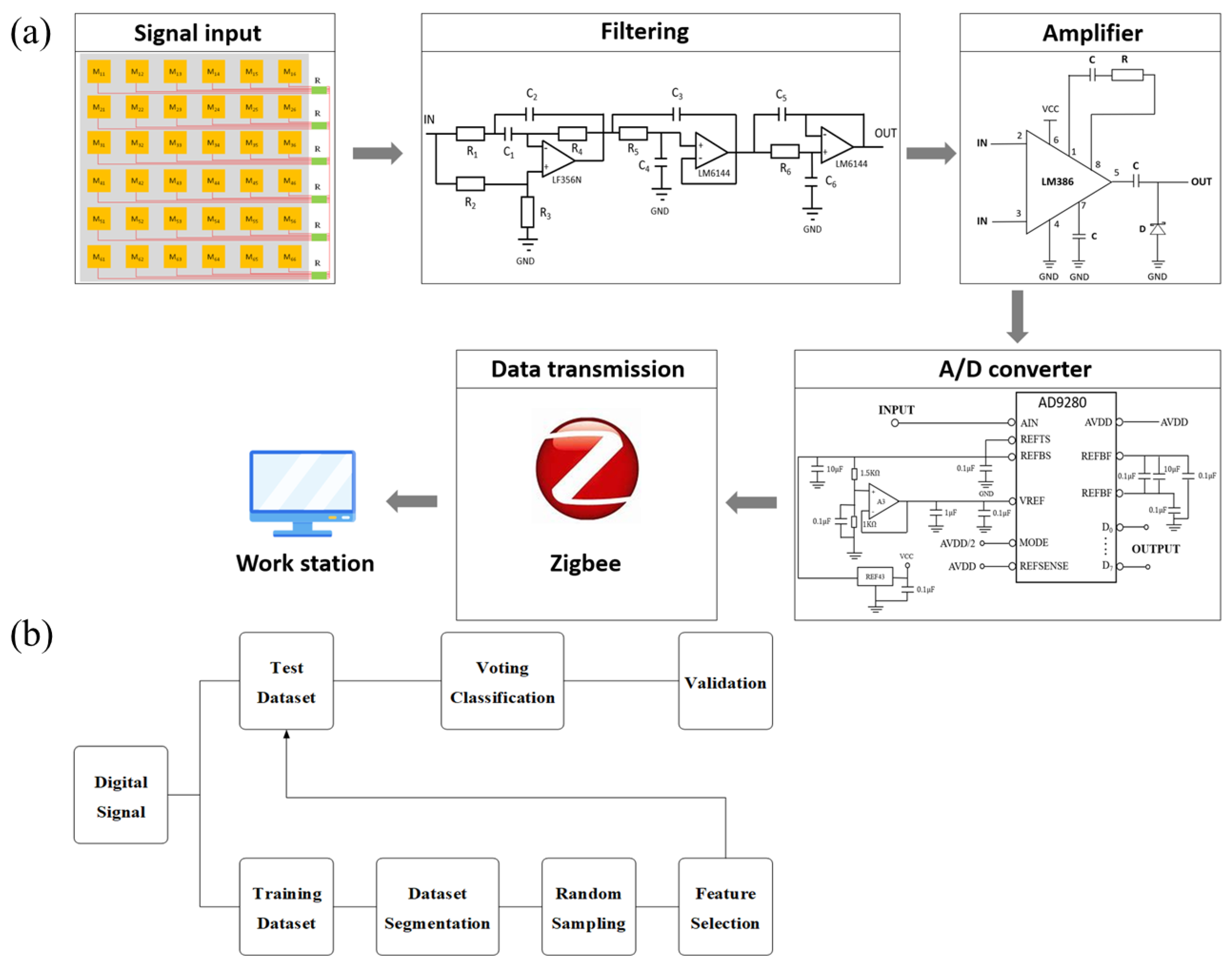
2.3. Analysis and Classification of Pressure Signals
3. Results
3.1. Performance Test
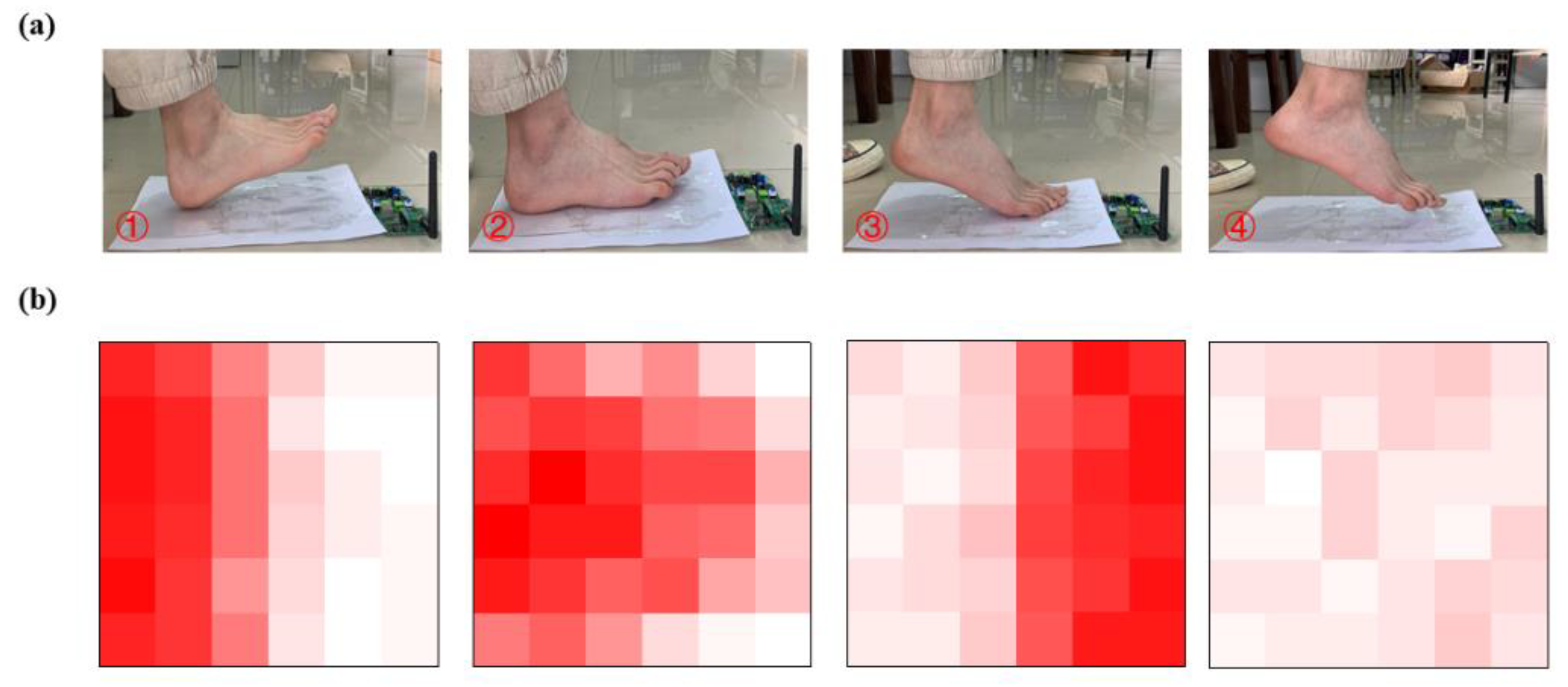
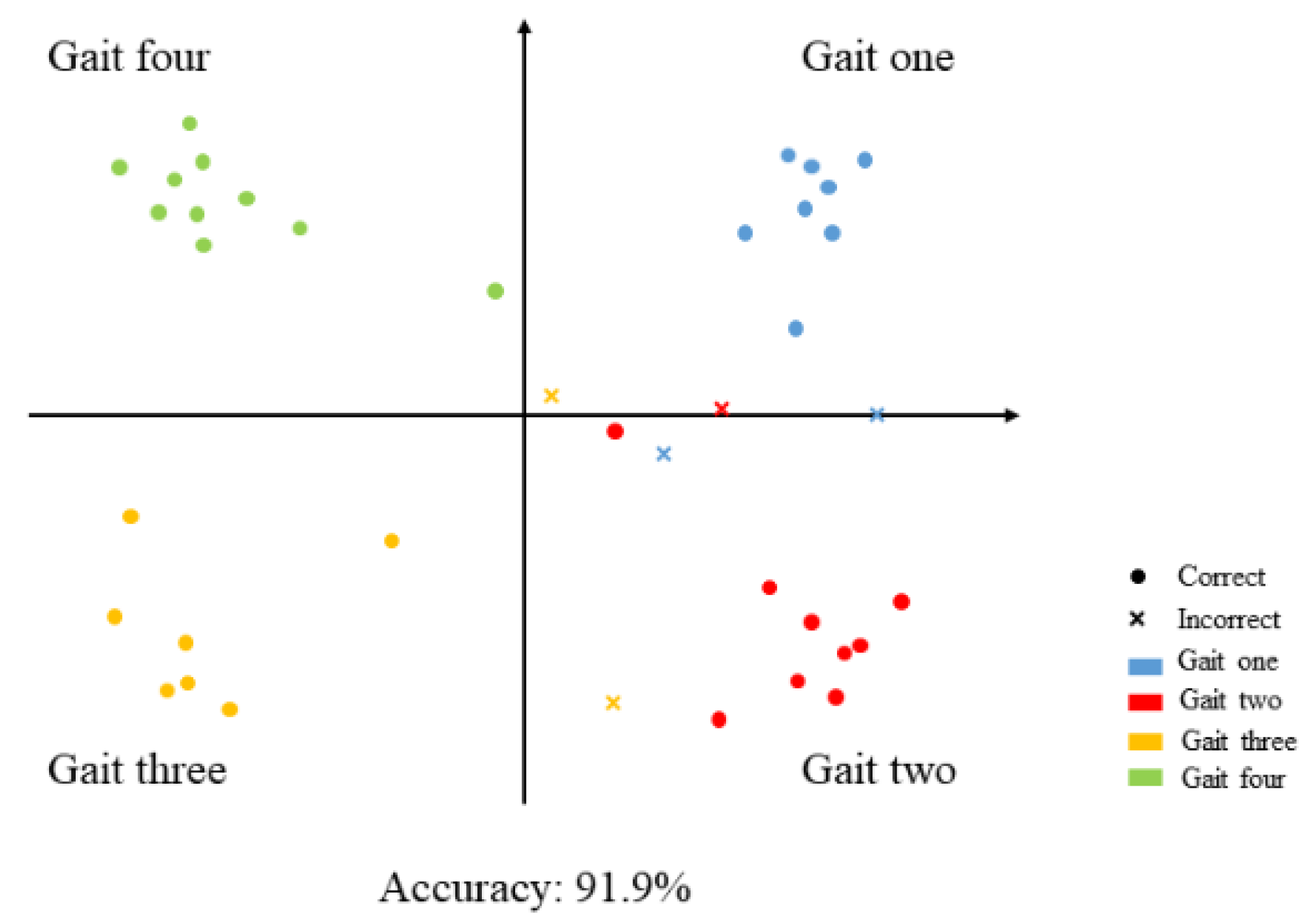
3.2. Gait Recognition
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, L.; Sun, Y.; Li, Q.; Liu, T.; Yi, J. Two Shank-Mounted IMUs-Based Gait Analysis and Classification for Neurological Disease Patients. IEEE Robot. Autom. Lett. 2020, 5, 1970–1976. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, Z.; Li, X.; Lin, Y.; Luo, N.; Long, M.; Zhao, N.; Xu, J.-B. Flexible Piezoelectric-Induced Pressure Sensors for Static Measurements Based on Nanowires/Graphene Heterostructures. ACS Nano 2017, 11, 4507–4513. [Google Scholar] [CrossRef] [PubMed]
- Wan, A.B.; Sanghyun, H.; Ji, S.; Franklin, B.; Jang-Ung, P. Transparent and flexible fingerprint sensor array with multiplexed detection of tactile pressure and skin temperature. Nat. Commun. 2018, 9, 2458. [Google Scholar]
- Wang, H.L.; Kuang, S.Y.; Li, H.Y.; Wang, Z.L.; Zhu, G.J.S. Large-Area Integrated Triboelectric Sensor Array for Wireless Static and Dynamic Pressure Detection and Mapping. Small 2020, 16, 1906352. [Google Scholar] [CrossRef]
- Chen, D.; Cai, Y.; Huang, M.C. Customizable Pressure Sensor Array: Design and Evaluation. IEEE Sens. J. 2018, 18, 6337–6344. [Google Scholar] [CrossRef]
- Huang, Y.; Jiang, Q.; Li, Y.; Zhao, C.; Wang, J.; Liang, P.J.M. Research and design of a novel, low-cost and flexible tactile sensor array. Measurement 2016, 94, 780–786. [Google Scholar] [CrossRef]
- Sekitani, T.; Yokota, T.; Zschieschang, U.; Klauk, H.; Bauer, S.; Takeuchi, K.; Takamiya, M.; Sakurai, T.; Someya, T. Organic Nonvolatile Memory Transistors for Flexible Sensor Arrays. Science 2009, 326, 1516–1519. [Google Scholar] [CrossRef]
- So, H.M.; Jin, W.S.; Kwon, J.; Yun, J.; Chang, W.S.; Baik, S. Carbon nanotube based pressure sensor for flexible electronics. Mater. Res. Bull. 2013, 48, 5036–5039. [Google Scholar] [CrossRef]
- Richhariya, B.; Tanveer, M. EEG signal classification using universum support vector machine. Expert Syst. Appl. 2018, 106, 169–182. [Google Scholar] [CrossRef]
- Lee, S.; Yoon, Y.J.; Lee, J.E.; Kim, S.C. Human–vehicle classification using feature-based SVM in 77-GHz automotive FMCW radar. IET Radar Sonar Navig. 2017, 11, 1589–1596. [Google Scholar] [CrossRef]
- Dagher, I.; Azar, F. Improving the SVM gender classification accuracy using clustering and incremental learning. Expert Syst. 2019, 36, e12372. [Google Scholar] [CrossRef]
- Maksimenko, V.A.; Maksimenko, V.A.; Kurkin, S.A.; Pitsik, E.N.; Musatov, V.Y.; Runnova, A.E.; Efremova, T.Y.; Hramov, A.E.; Pisarchik, A.N. Artificial Neural Network Classification of Motor-Related EEG: An Increase in Classification Accuracy by Reducing Signal Complexity. Complexity 2018, 2018, 9385947. [Google Scholar] [CrossRef] [Green Version]
- Celin, S.; Vasanth, K. ECG Signal Classification Using Various Machine Learning Techniques. J. Med Syst. 2018, 42, 241. [Google Scholar] [CrossRef] [PubMed]
- Curro, J.; Raquet, J.; Borghetti, B. Navigation using VLF signals with artificial neural networks. J. Inst. Navig. 2018, 65, 549–561. [Google Scholar] [CrossRef]
- Wu, G.; Processes, J.J. Multi-Label Classification Based on Random Forest Algorithm for Non-Intrusive Load Monitoring System. Processes 2019, 7, 337. [Google Scholar] [CrossRef] [Green Version]
- Khojandi, A.; Shylo, O.; Zokaeinikoo, M. Automatic EEG classification: A path to smart and connected sleep interventions. Ann. Oper. Res. 2019, 276, 169–190. [Google Scholar] [CrossRef]
- Tao, Z.; Chen, W.; Li, M. AR based quadratic feature extraction in the VMD domain for the automated seizure detection of EEG using random forest classifier. Biomed. Signal Process. Control 2017, 31, 550–559. [Google Scholar]
- Dhindsa, I.S.; Agarwal, R.; Ryait, H.S. Performance evaluation of various classifiers for predicting knee angle from electromyography signals. Expert Syst. 2019, 36, e12381. [Google Scholar] [CrossRef]
- Gang, L.I.; Wang, W.; Zhang, S. Application of SVM in EEG signal classification. J. Comput. Appl. 2006, 26, 1427–1431. [Google Scholar]
- Yunoh, M.F.M.; Abdullah, S.; Saad, M.H.M.; Nopiah, Z.M.; Nuawi, M.Z. K-means clustering analysis and artificial neural network classification of fatigue strain signals. J. Braz. Soc. Mech. Sci. Eng. 2017, 39, 757–764. [Google Scholar] [CrossRef]
- Zhang, R.; Xiao, X.; Zhi, L.; Wei, J.; Li, J.; Cao, Y.; Zhu, Y.; Jiang, D. A New Motor Imagery EEG Classification Method FB-TRCSP plus RF Based on CSP and Random Forest. IEEE Trans. Biomed. Circuits Syst. 2019, 13, 670–681. [Google Scholar] [CrossRef]
- Alfaouri, M.; Daqrouq, K. ECG Signal Denoising By Wavelet Transform Thresholding. Am. J. Appl. Sci. 2008, 5, 276–281. [Google Scholar] [CrossRef]
- Okumus, H.; Aydemir, O. Random forest classification for brain computer interface applications. In Proceedings of the 2017 25th Signal Processing and Communications Applications Conference (SIU), Antalya, Turkey, 15–18 May 2017; pp. 1–4. [Google Scholar]
- Sebastijan, S.; Matjaz, J. Inertial Sensor-Based Gait Recognition: A Review. Sensors 2015, 15, 22089–22127. [Google Scholar]
- MacWilliams, B.A.; Armstrong, P.F. Clinical applications of plantar pressure measurement in pediatric orthopedics. In Proceedings of the Pediatric Gait: A New Millennium in Clinical Care and Motion Analysis Technology, Chicago, IL, USA, 22–22 July 2000; pp. 143–150. [Google Scholar]
- Razak, A.A.; Zayegh, A.; Begg, R.K.; Wahab, Y. Foot Plantar Pressure Measurement System: A Review. Sensors 2012, 12, 9884–9912. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rossi, S.; Lenzi, T.; Vitiello, N.; Donati, M.; Carrozza, M.C. Development of an in-shoe pressure-sensitive device for gait analysis. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; Volume 2011, pp. 5637–5640. [Google Scholar]
- Kale, A.; Chowdhury, A.; Chellappa, R. Towards a View Invariant Gait Recognition Algorithm. In Proceedings of the IEEE Conference on Advanced Video & Signal Based Surveillance, Miami, FL, USA, 22 July 2003. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pressure (Kg·cm−2) | Resistance (KΩ) | Conductance (mS) |
|---|---|---|
| 0 | 721.49 | 0 |
| 0.01 | 21.34 | 0.05 |
| 0.02 | 4.87 | 0.21 |
| 0.04 | 2.51 | 0.40 |
| 0.06 | 1.97 | 0.51 |
| 0.08 | 1.41 | 0.71 |
| 0.1 | 1.11 | 0.9 |
| 0.12 | 1.02 | 0.98 |
| 0.16 | 0.89 | 1.12 |
| 0.2 | 0.73 | 1.37 |
| 0.25 | 0.56 | 1.79 |
| Age Group | Age | Gender (Female/Male) | Weight (kg) | Left-Foot Pressure (kg) | Right-Foot Pressure (kg) |
|---|---|---|---|---|---|
| 16–20 | 17 | M | 58.3 | 30.1 | 29.3 |
| 18 | M | 60.5 | 31.6 | 29.9 | |
| 19 | F | 43.4 | 22.3 | 20.2 | |
| 20 | F | 50.6 | 26.8 | 25.4 | |
| 20 | M | 68.1 | 34.6 | 33.1 | |
| 21–25 | 21 | M | 61.6 | 32.5 | 30.9 |
| 23 | F | 47.8 | 24.5 | 22.8 | |
| 23 | F | 49.7 | 25.8 | 24.3 | |
| 24 | M | 52.2 | 27.6 | 25.1 | |
| 24 | F | 51 | 26 | 24.5 | |
| 26–30 | 28 | F | 61.3 | 32.4 | 29.6 |
| 28 | M | 74.3 | 37.6 | 36.8 | |
| 29 | M | 58.7 | 28.3 | 30.4 | |
| 29 | M | 83.9 | 43.1 | 41 | |
| 29 | F | 55.9 | 28.6 | 27.9 | |
| 31–35 | 31 | M | 67.3 | 34.8 | 33.2 |
| 31 | M | 75.2 | 36.5 | 39 | |
| 32 | F | 59.6 | 31.6 | 28.7 | |
| 33 | F | 48.7 | 25 | 23.9 | |
| 35 | F | 53.9 | 28.2 | 26 | |
| 36–40 | 37 | M | 54.4 | 28.5 | 26.4 |
| 39 | F | 46.1 | 23.7 | 22.3 | |
| 40 | M | 67.8 | 35.8 | 32.6 | |
| 40 | M | 73.5 | 36.9 | 35.7 | |
| 40 | F | 52 | 26.5 | 25.5 | |
| 41–45 | 41 | F | 48.7 | 25.1 | 24.1 |
| 42 | F | 59.3 | 31.4 | 28.2 | |
| 44 | M | 71.9 | 37 | 34.8 | |
| 44 | F | 55.2 | 27.9 | 26 | |
| 45 | M | 68 | 35.3 | 33.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, W.; Xiao, Y.; Wang, X.; Deng, F. Plantar Pressure Detection System Based on Flexible Hydrogel Sensor Array and WT-RF. Sensors 2021, 21, 5964. https://doi.org/10.3390/s21175964
Liu W, Xiao Y, Wang X, Deng F. Plantar Pressure Detection System Based on Flexible Hydrogel Sensor Array and WT-RF. Sensors. 2021; 21(17):5964. https://doi.org/10.3390/s21175964
Chicago/Turabian StyleLiu, Wei, Yineng Xiao, Xiaoming Wang, and Fangming Deng. 2021. "Plantar Pressure Detection System Based on Flexible Hydrogel Sensor Array and WT-RF" Sensors 21, no. 17: 5964. https://doi.org/10.3390/s21175964