2. Description of the Simultaneous Analytical Method
The simultaneous analytical method for measuring two position coordinates was published in [
30,
31]. In these publications, we use working equations enabling measurement of the beacon distance
R and the azimuth ω. These equations represent a mathematical model of this method. The method principle consists in a calculation of several so-called functional beacon distances (hereinafter
functional distances) based on known distances between the two selected diodes and the measured distances between images of these diodes that were captured by the camera. Measuring two coordinates, as presented in [
30,
31], enables the determination of the position of an object only in the 2D plane. The only position coordinate on which the working equations depend is the azimuth ω. Functional distances were calculated for the so-called functional diodes S
2, S
3, S
6, and S
8 according to projections onto the
yρψω0 axis. The problem can be solved only with the use of the functional distances for the diodes S
6 and S
8. When measuring the beacon position in the plane, the functional distance equation for the diode S
8, for example, is as follows [
30,
31]:
where
b’81 is the distance between the image of the S
1 reference diode and the image of the S
8 functional diode in the plane of the camera detector and
d16 and α
1 are the parameters of the beacon (see
Figure 1).
For the measurement of the position of an object in 3D, the mathematical model had to be extended by at least one functional distance of one of the functional diodes S4, S5, S7, and S9, which lie on the lower line of the beacon. The working equations had to be adjusted also to include projections onto the zρψω0 axis, if they exist, which depend on both azimuth ω and elevation ψ. At least three functional distances have to be used as working equations. Such equations have to be chosen that their manifestation for at least one pair of functional diodes is opposite for both position angles. The chosen calculation uses parallel projections of the distances, between the reference diode S1 and all eight functional diodes S2 to S9, onto appropriate axes of the reference rectangular coordinate system. Its axis xω is identical to the optical axis of the camera xC. Then, for one particular functional diode, its functional distance for the provided azimuth and elevation is the calculated distance between the reference diode and the camera. The working equations are derived from the lens equations of the projections of the distances between the relevant diodes.
The angles ω and ψ are unknown variables that are computed as the numbers for which the deviation between the beacon functional distances, for the individual functional diodes, is a minimum. In other words, we are looking for the minimum of the root mean square (rms) of the difference
Drms between the individual functional distances and the mean of these functional distances. When the minimum is reached, the set azimuth, the set elevation, and the mean of the calculated functional distances are equal to the desired measured variables ω
m, ψ
m, and
Rm, respectively. The following formulas, i.e., the working equations for the functional diodes
S3,
S5,
S8, and
S9 represent the mathematical model of this method:
where
and
;
where
,
,
,
, and
;
where
,
, and
;
where
,
,
,
,
,
,
,
, and
.
The above equations were derived assuming that the
yB beacon axis and
yC camera axis are parallel to the horizontal plane ρ
h (see
Figure 2). Their mutual roll angle γ
r, which is created by the beacon or the camera rotation around the camera optical axis, was considered to be zero. The variables expressed with (2) to (5) are the functional distances
Ri1 for diodes S
i, where
i = 3, 5, 8, 9, and reference diode S
1. They are the beacon distances computed from the projections of the distances
PSi (between the reference diode S
1 and the functional diodes) onto the individual axes of the reference rectangular coordinate system and from the projections of the image distances
bi1 of these diodes onto transverse axes
yC and
zC of the camera coordinate system
CxCyCzC. The reference coordinate system is parallel with the camera coordinate system. The axis
xω of the reference coordinate system and the axis
xC of the camera coordinate system are identical with the camera optical axis. The origin of the reference system is at the intersection of the axis
xω and the beacon front wall
Af (in the place of the reference diode S
1); the axes
yρωψ0 and
zρωψ0 lie in the plane ρ
ωψ0, which is identical with the beacon front wall
Af for ω = ψ = 0°. In this case,
yρωψ0 ≡
yB and
zρωψ0 ≡
zB. The azimuth and the elevation are formed by the beacon rotation around the axis
zρωψ0 and
yB, respectively. Parameters
d16 and α
1 are derived from the beacon base
b and the beacon opening angle β (see
Figure 1). The working equations for the rest of the functional diodes are performed analogically. The elements
PSixω are corrections of the deviation between the object distances of the functional diodes and the measured beacon distance.
For all the functional diodes, the rms of the functional distance differences
Drms (m) is as follows:
where
Di1 (m) is the functional distance difference
Di1 (m) for the diode pair S
i and S
1. It is given by the formula
where
(m) is the mean of the calculated functional distances. This mean is expressed by the following formula:
Changing the azimuth and the elevation in the working equations of the mathematical model leads to changes in the mean of the calculated distances and the rms of the distance differences. Assuming that the input position angles are equal to the true azimuth and the elevation, the beacon parameters are set exactly according to the selected values, and the camera has a high resolution, we could theoretically expect the rms of the distance differences to be practically zero.
3. Experimental Test Results
Three basic experimental tests and several check tests were performed. Their aim was to verify the functionality of the created mathematical model and the suitability of the simultaneous analytical method for measuring the optical beacon distance, azimuth, and elevation. The beacon base
b and its opening angle β were equal to 470 mm and 56.2°, respectively (see
Figure 1). The beacon was placed on a positioning mechanism, which was put on the Thorlabs RBB12A rotation stage. The MOTICAM 1080 camera was used, having two lenses with different focal lengths.
Figure 3 shows beacon in the nominal position of ω
n = 20° and ψ
n = 35° during check test.
The rotation stage was used to set the actual beacon azimuth. The conventionally true azimuth ω0 was measured using a scale of the actual rotation stage with the error of 2.5′. The azimuth nominal values ωn were selected, around which the actual azimuth was set. The positioning mechanism was used to set the beacon elevation to nominal discrete values ψn in the range from 0 to 35° with the step of 5°. The conventionally true elevation values ψ0 were measured using the Fortum model 4780200 inclinometer with the error of ±0.1°. The conventionally true beacon distances R0 were measured using the Leica Disto D510 laser distance meter with the error of 1 mm. The nominal azimuth ωn and elevation ψn were introduced to mark the groups of the conventionally true position angles as the azimuth was set randomly and, due to the random elevation of the relatively loose beacon fixation, the actual beacon elevation differed from the elevation set by the positioning mechanism.
The first experiment was performed using a lens with a focal length
fL = 120 mm. The beacon distance
R0 was 46,520 mm. The nominal azimuth ω
n (°) and elevation ψ
n (°) were {−3, 0, 3, 10, 20, 35, 46} and {0, 5, 20, 35}, respectively. For the individual nominal elevations, the azimuths were set around their nominal values and the beacon image was recorded. Five test series were performed for every elevation. Obtained results were used for statistical processing of errors. The second and third tests were performed with the same beacon, however, using a lens with a focal length
fL = 25 mm. The beacon distances were 13,460 and 46,728 mm, respectively. The setup of these tests was the same as for the first test. One hundred forty photos were taken for each distance and focal length; in total, 420 photos were taken.
Table 1 shows examples of distance
Rm, azimuth ω
m, and elevation ψ
m that were measured during the first experiment in the first and second test series, for the nominal elevation of 20°. For comparison, the conventionally true values
R0, ω
0, and ψ
0 are also shown.
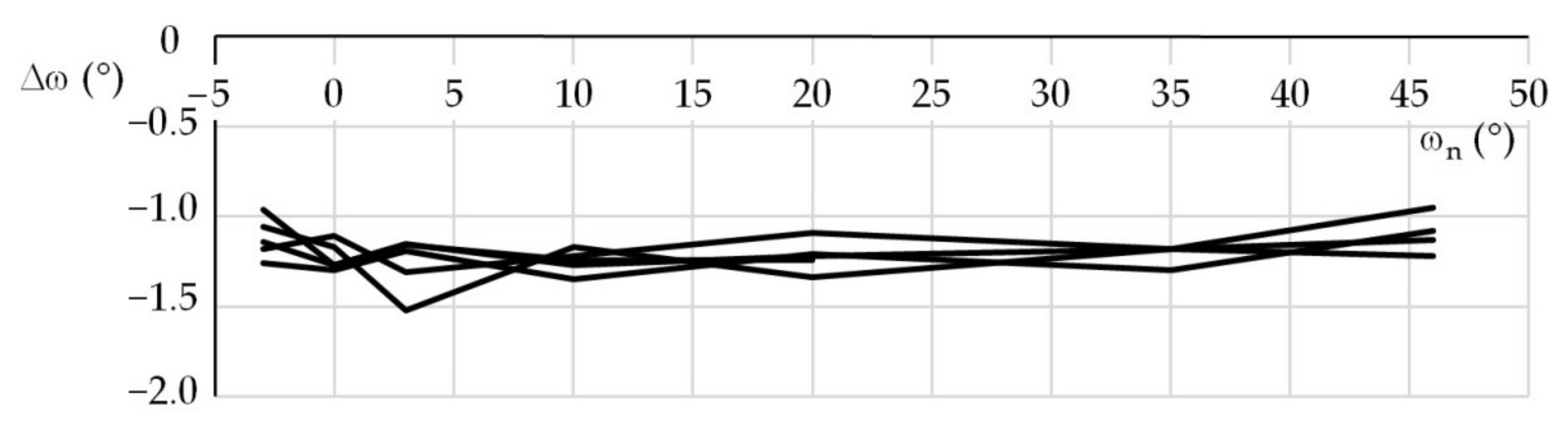
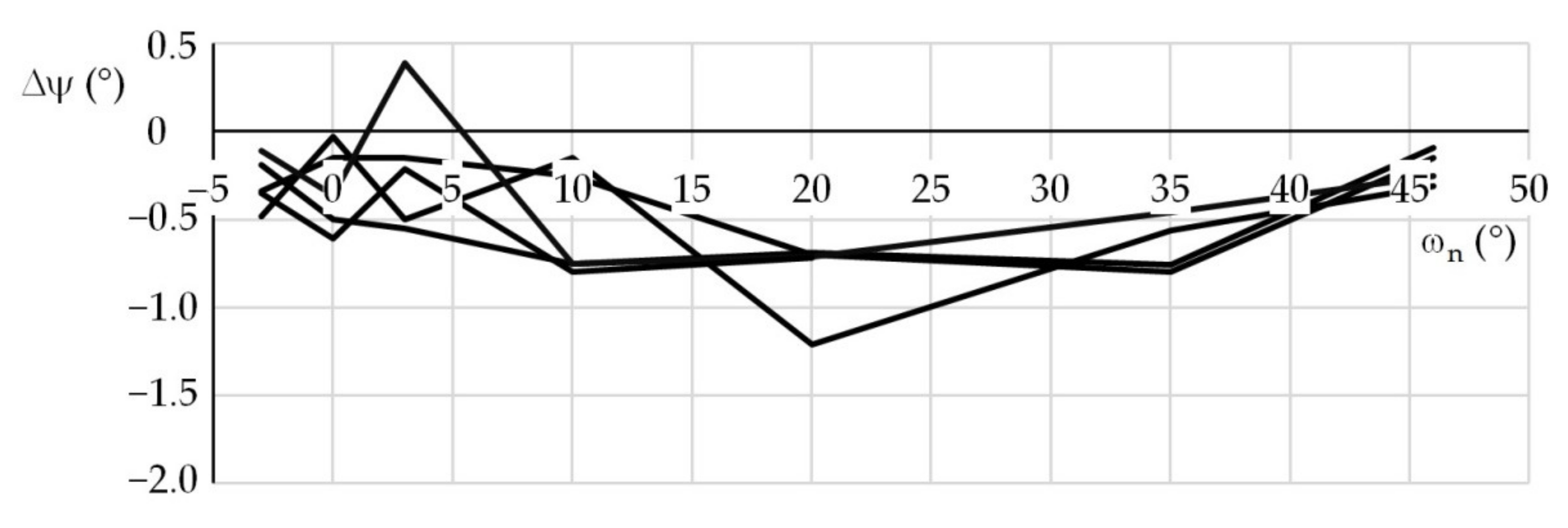
Figure 4,
Figure 5 and
Figure 6 show the distance percentage errors δ
R and the position angles errors Δω and Δψ for the same test and in all the five test series.
The distance measurements from the first test were as follows: For the nominal elevation ψn = 0°, the mean of the measured distances was 46,675 mm. For the nominal elevations of 5, 20, and 35°, the means of the measured distances were 46,668, 46,620, and 46,643 mm, respectively. Corresponding sample standard deviations sR were 100, 127, 197, and 355 mm, respectively.
Results from the second experiment were as follows: For ψn (°) ∈ {0, 5, 20, 35}, the means of the measured distances were 13,513, 13,550, 13,518, and 13,499 mm. The corresponding sample standard deviations sR (mm) ∈ {45, 45, 64, 105}.
From the measured distances in the third experiment, for the same above-mentioned nominal elevation, we yielded and sR (mm) ∈ {189, 129, 220, 374}. The presented values were determined from the test results of all five series.
The means and sample standard deviations of the distance percentage errors as well as azimuth and elevation errors, gained from the results of all three experiments, are listed in
Table 2,
Table 3 and
Table 4. The measurement error frequency of these individual quantities is expressed in percentage from the total number of measurements for the individual nominal elevations. The intervals of the absolute distance percentage errors |δ
R| are 0.0 to 0.1%, 0.0 to 0.5%, and 0.0 to 1.0%. The spans of the absolute azimuth errors |Δω|and absolute elevation errors |Δψ|are 0.0 to 0.5°, 0.0 to 1.0°, and 0.0 to 2.0°.
The measured azimuth and elevation means and their sample standard deviations are not presented as their conventionally true values mostly differed from the nominal values and were not the same even in the individual test series.
For azimuth, the error frequency was determined for the error deviations between the individual tests and the mean error of the particular test series. The reason for selecting these deviations was the beacon’s random default position in relation to the rotation stage and in relation to the support base in the azimuth. These random positions manifested themselves as a component of systematic errors. The default position differed for the individual elevations as a result of the necessary manipulation with the beacon. Thus, the relatively large nonzero mean errors were proportional mainly to the magnitudes of the unspecified default position of the beacon.
The elevation error frequency was evaluated analogously to the distance errors, according to the differences between the conventionally true and the measured values. In fact, the unspecified beacon elevation did not shift the measurement errors too much outside the selected intervals that were expected for the frequency.
4. Sources of Errors
The measurement errors of the simultaneous analytical method had the following basic causes:
Differences between the actual beacon and camera parameters and the parameters that were entered into the mathematical model;
Inaccuracies in determining the diode picture coordinates;
Aberration of the camera lens;
Inaccuracies in determining the beacon and camera mutual position.
4.1. Differences between the Actual Beacon and Camera Parameters and the Mathematical Model Parameters
The beacon base, the opening angle, and the camera focal length are all used in the beacon mathematical model. If the actual real values differ from the values entered into the model, methodological measurement errors occur. In general, these errors occur in all three measured coordinates. This fact worsens the measurement accuracy; however, on the other hand, it enables adjusting the measuring system with its optimal beacon parameters for which the accuracy indicator is the best. By modifying the mathematical model parameters, all the measured quantities can be affected. Especially, manipulation with the focal length of the camera lens is important in the mathematical model. It enables optimizing the beacon distance measurement accuracy, and at the same time, it does not influence the beacon measured angles.
4.2. Inaccuracies in Determining the Diode Picture Coordinates
The influence of the pixel number error (pixel coordinate error) was tested on the mathematical model, based on the fifth series of the first experiment results, with the beacon elevation of 5°. The azimuth of 10° was selected.
For one beacon diode, the number of pixels was increased by one or by two for the
yC coordinate. Subsequently, the corresponding distance, azimuth, and elevation were determined. The influence of the pixel coordinates was tested for all nine diodes. The change of the measured beacon position was always measured only for the
yC pixel coordinate of one diode. The gained results are provided in
Table 5.
Changes of the position angles Δω
p1, Δψ
p1 and Δω
p2, Δψ
p2 are the differences between the original azimuth and elevation and the new azimuth and elevation for the increased pixel coordinates
yC0 + 1 and
yC0 + 2, respectively, where
yC0 is the original pixel coordinate. A change of the pixel coordinate just in one direction can affect all three measured quantities. The distance deviations are not presented in
Table 5 as they were only in order of hundredths of a percent. The maximum of the distance error changes was about 0.15%.
It is clear from the table that most deviations for both angles were in order of tenths of a degree. Their maximum magnitude was 0.3° for the change by one pixel and 0.5° for the change by two pixels. The deviations were zero in some cases. They occurred not only when the pixel coordinate was increased by one pixel, but also when the pixel coordinate was increased by two pixels. The nonzero deviations for two pixels were in most cases larger than deviations for one pixel. They were never smaller.
When the pixel coordinates changed for several diodes, the measured position angles changed by more than one degree. This was verified by the pixel coordinates being assessed by two persons independent of each other. The deviations of the determined pixel number were observable at both the yC coordinates and the zC coordinates. The biggest difference found between the measured position angles was 1.5°. It is clear that the method is sensitive to the accuracy of determining the pixel coordinates.
4.3. Lens Aberration
In general, camera lens aberrations can be the cause of measurement errors. The distortion of all the used lenses was experimentally verified. The distortions were not measurable. Other lens aberrations were compensated manually. For these reasons, the influence of the lens aberrations on the measurement accuracy was not considered.
4.4. Inaccuracies in Determining Mutual Position of the Beacon and the Camera
The azimuth measurement results were burdened with some systematic errors due to the fact that some components of the azimuth were not determined and included in the conventionally true values. These components were the beacon rotation relative to the rotation stage movable disk and the supporting base rotation that the rotation stage was placed on. Another factor that could adversely affect the measurement accuracy of both position angles was the mutual tilt of the camera and the beacon, i.e., a mutual roll of these objects around the camera’s optical axis (see
Figure 2). Two check measurements were performed with the aim of quantitatively assessing the mentioned inaccuracies.
The first check measurement helped to assess the influence of the undetermined components of the azimuth. The beacon was set with a maximum azimuth deviation of approximately 1.0° towards the rotation stage movable disk. The measurements were performed for two nominal elevations of 0 and 35°. For each elevation, the supporting base was set for initial azimuths of −6.2, 0, and 6.2°. For each of these azimuths, several conventionally true azimuths were set on the rotation stage. The resulting absolute azimuth deviations, relative to the initial azimuths of the supporting base, did not exceed 0.9 and 0.6° for the nominal elevations of 0 and 35°, respectively. The measurement errors were comparable to the errors obtained from the basic experiments. It is clear that for practical use of this method, a firm fixation between the observed object and the measuring pattern has to be ensured.
The influence of the mutual tilt between the camera and the beacon was also measured at nominal elevations of 0 and 35°. For each elevation, their mutual tilt γ
r was set at −1.1, 0.0, and 0.9°. The error span and the maximum measurement errors are provided in
Table 6. It shows that the mutual tilt between the camera and the beacon influences the measurement error magnitude. However, for the selected relatively small tilts, it demonstrated itself only by a small accuracy worsening. In some cases, the errors were even smaller for the nonzero tilt than for the zero tilt. This phenomenon can be explained by the difference between the beacon parameters used in the mathematical model and the actual beacon parameters.
4.5. Influence of the Mathematical Model
The errors resulting from determining inaccuracies of the pixel coordinates, as well as the beacon parameter inaccuracies, are also influenced by the mathematical model character, formed by a system of working equations. The equation’s core is represented by the ratios of the distance projections between the reference diodes and the functional diodes and the corresponding distance projections of the diode images. The object distances are expressed by trigonometric functions of the azimuth and elevations. Both the azimuth and the elevation are independent variables that are systematically changed until the required solution, based on the above-mentioned rule, is found (see
Section 2). The coefficients and the initial angles in the working equations are taken from the beacon parameters. The differences between the parameters used in the mathematical model and the actual beacon parameters contribute to the systematic errors. These differences burden the measurement accuracy of the individual functional diodes to different extents, depending on the actual position angles. These mentioned parameter differences cause various functional distance differences, for all functional diodes.
Sizes of images are determined from the pixel coordinates of the corresponding diodes. Errors of the pixel coordinate determination play a significant role in the measurement errors of all the position coordinates. Minimum systematic errors are given by the size of one pixel as it determines elementary measurement uncertainty that cannot be reduced. A manifestation of this uncertainty depends on the picture size, beacon parameters, and measured position angles.
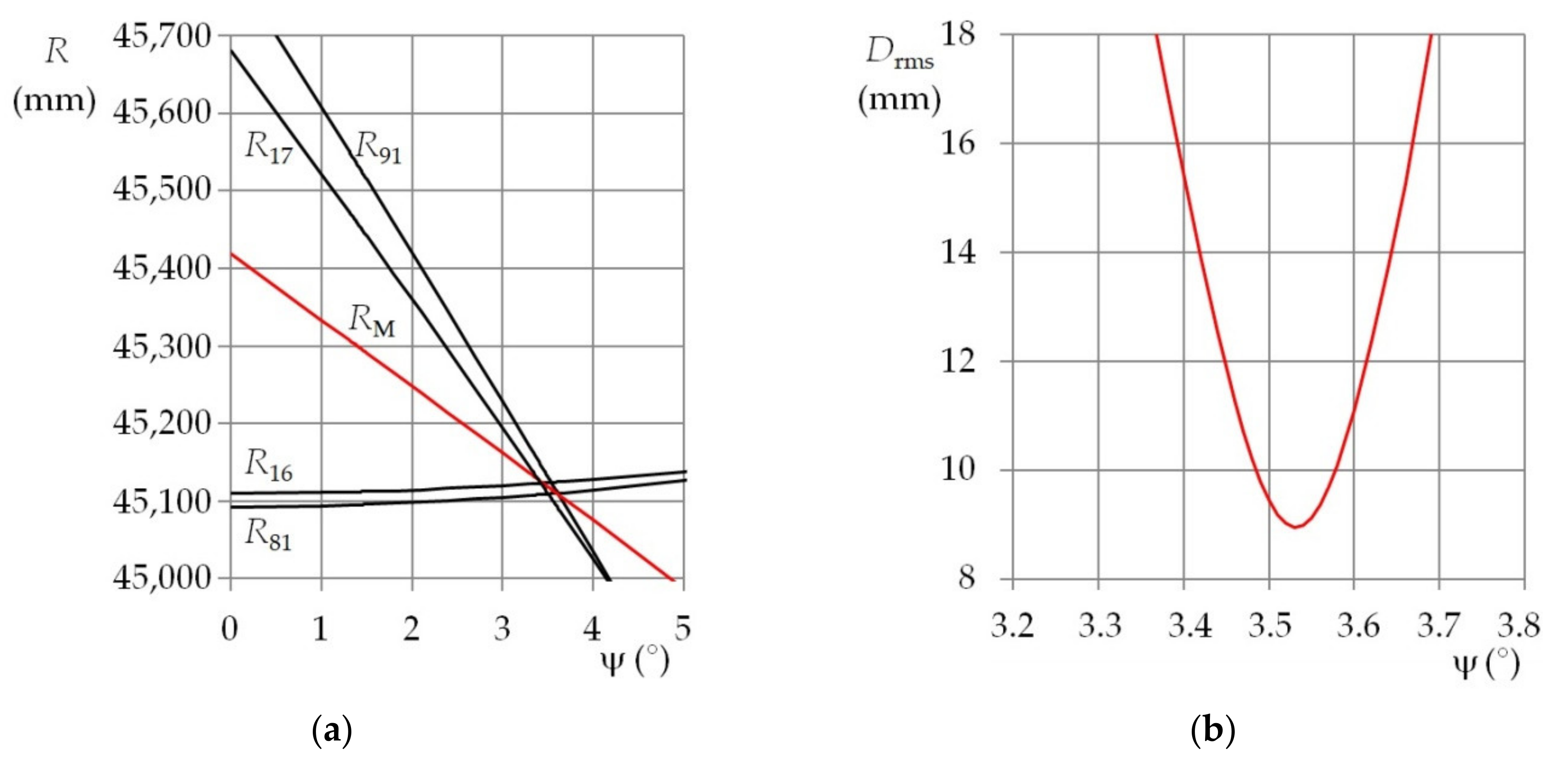
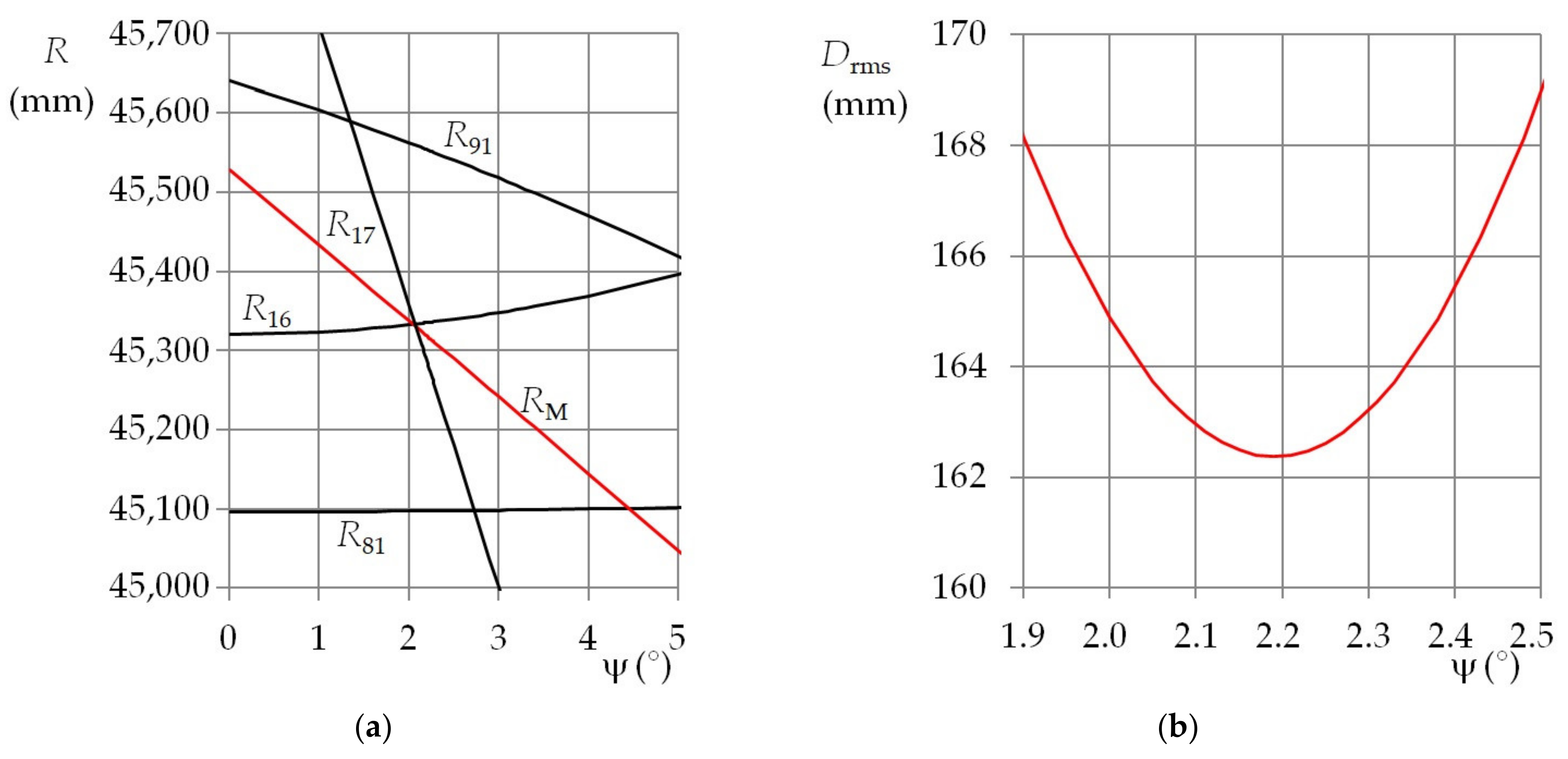
This fact is illustrated in
Figure 7a and
Figure 8a. They show the dependence of the functional distance, for the selected functional diodes, on the elevation that is entered into the mathematical model. Two combinations of the nominal position angles were used. Individual plots show azimuths when the rms minimum of the distance deviation
Drms was achieved. Due to the above-mentioned errors, the
Drms minimum had different levels for various combinations of the azimuth and the elevation. In addition, the rate at which the
Drms was approaching its minimum depended on the actual position angles. These properties are evident in
Figure 7b and
Figure 8b.
The presented results are from the first experiment (with beacon distance of 46,820 mm and a lens with focal length of 120 mm) for ω
n = ψ
n = 0° (see
Figure 7a) and for ω
n = 20° and ψ
n = 0° (see
Figure 8a). The plots show not only the functional distances
R16,
R17,
R81, and
R91 for the reference diode S
1 and the functional diodes S
6, S
7, S
8, and S
9, but also the calculated functional distance means
RM. In addition, the plots of the rms of the distance deviations
Drms for the mentioned diodes and the nominal position angles are shown in
Figure 7b and
Figure 8b. The functional distances are shown depending on elevation. The azimuth entered into the mathematical model was actually the parameter of the respective functions. The rms of the distance deviations was evaluated during the measurement process. Its only unambiguous minimum was determined using the entered azimuth and its appropriate elevation. By changing the azimuth, the minimum
Drms was shifted along the elevation axis and changed in size. Generally, a local minimum for a function with two variables was searched for. When the smallest rms was achieved, then the mean of the functional distances, the entered azimuth, and the appropriate elevation were the sought beacon coordinates.
It is clear from the plots of the functional distances that the measurement errors depend on the combination of the distance, azimuth, and elevation. If the measurements were burdened only with systematic errors, resulting from the incorrect determination of the actual position coordinates, the mean of the errors would be approximately constant. As the level of the random errors depended on the mentioned combination of the measured quantities, the mean errors expressed as a function of the azimuth often showed a certain trend—most often a significant local extreme (see
Figure 4,
Figure 5 and
Figure 6).
This fact is clear from the functional distance plots. Each diode plot line has a different slope. If the slope is not steep, the deviations between the model parameters and the actual beacon parameters are the significant cause of the measurement errors. This applies especially to the beacon opening angle. It can happen that a small deviation of the beacon parameters has to be compensated by azimuths or elevations that differ very much from the actual values. If the slope of the functional distance line is steep, then the pixel coordinate errors will manifest for the image of the corresponding functional diode. As the distances between the images of the corresponding functional diodes and the reference diode are very small, the deviation of one or two pixels can cause big errors.
An important feature of the mathematical model is the fact that the pixel coordinate errors and the differences between parameters of the real beacon and the mathematical model do not have the same influence on the measurement errors. This is true in the whole range of the measured quantities and their combinations. Thus, the adjustment of the measuring system using optimization of the mathematical model parameters is possible only for some selected intervals of the measured quantities and their combinations. This mathematical model feature was especially apparent for the beacon opening angle.
6. Conclusions
The results of the performed experiments show that the presented simultaneous passive method is usable not only for two coordinates, but also for three position beacon coordinates. In both cases, the mathematical model was based on lens equations of the lines connecting the individual functional diodes with the reference diode. Their functional distances were derived from these equations, depending on one or two beacon position angles. The task was solved numerically according to the rms of the difference between the individual functional distances and the mean of the functional distances. When the minimum of this rms was reached, then, the mean of the functional distances and the substituted values of the position angles were taken as the required results. The method can be used in practice to determine the mutual position of the beacon and camera with sufficient accuracy not only in the 2D plane, but also in 3D. The measurement accuracy was limited mainly by the camera resolution. In addition, the deviations between the real beacon parameters and the mathematical model parameters also have some negative influence on the measurement errors.
The particular reached measurement accuracy for the selected configurations was comparable between the individual experiments. The distance percentage errors were in the order of tenths of a percent. The mean errors and standard deviations of the azimuth and elevation errors were in order of tenths of an angular degree. An increase in the absolute mean azimuth errors above one degree was caused by systematic errors as a consequence of the undetermined components of azimuths (see
Section 4.4).
The measuring system can be adjusted by a suitable selection of some mathematical model parameters. The effects of the model focal length fM and the model opening angle βM were verified. The accuracy of the beacon distance measurement can be favorably affected by the focal length fM entered into the mathematical model. Thus, it is possible to effectively reduce the distance percentage errors and to find the optimal focal length fMo, usable within all the intervals of the individual measured quantities, while the influence on the azimuth and elevation remains negligible. On the contrary, the influence of the angle βM is reflected in all the measured coordinates. Thus, the angle βM is potentially suitable for the azimuth and elevation; however, its utilization in practice is not suitable as its optimal value depends on the current βM value and on the position angle combinations.
Analogously, the minimum and the maximum measured beacon distances were affected by the beacon size as much as by the focal length. The layout of the functional diodes, and their mutual position with the reference diode, had influence mainly on the span of the measured position angles. All equations of the mathematical model could not be used when some diodes appeared in one line and were not distinguishable or visible. This situation occurred for large beacon distances or when the position angles exceeded their limits ωl and ψl. The limits are clearly provided not only by the beacon layout but also, in general, by both position angles; for ψ = 0° the ωl = β, and for ω = 0° the ψl = 90°.
The option to use this method, but with a smaller number of diodes, was verified too. Only five diodes were used in this model. The diode S
1 was used as a reference diode, and the diodes S
6, S
7, S
8, and S
9 were tested as the functional diodes (see
Figure 1). It is clear from the results that the method was also suitable. However, it was necessary to select only diodes for which the azimuth and the elevation had opposite manifestations. In other words, the line projections between the diodes had to extend for some functional diodes and shorten for others. The resultant errors were comparable with errors listed in
Table 5,
Table 6 and
Table 7.
The presented method is potentially suitable for measuring the position of a random known object. Both the functional and the reference points have to be defined on the surface of this object. In an ideal case, all of these points are visible in the camera pictures. Their images have to be clearly visible so that the distances between the reference point and the individual functional points in the pictures are measurable. Analogously, with this purpose-built beacon, the mathematical model of the object of interest has to contain equations including the line projections (between the reference point and the individual functional points) in the corresponding plane and the line images in the plane of the camera detector.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}