1. Introduction
Ever-increasing vehicular traffic has led to several global issues, such as increasing incidents of road accidents, time-consuming traffic congestions, inefficient fuel utilization, and environmental impact (for example, global warming). To make travel more efficient and safe, vehicular ad hoc networks (VANETs) [
1] have been introduced. Mobile vehicles, acting as network nodes, are equipped with computation and communication resources. This enables vehicles to process computational tasks aiding traffic control, efficient fuel utilization, and infotainment services. However, the computational and communication capabilities of mobile vehicles are often limited. Consequently, the performance of compute-intensive services that require real-time responses is compromised. To address this, a cloud-based vehicular network has been introduced.
Cloud computing [
2] enables on-demand provisioning of computation and communication resources to the vehicles over the Internet. The vehicles’ requests tap into the scalable cloud computing resources to improve the quality-of-service (QoS), such as total execution time, processing time, throughput, and latency. However, the cloud servers located at the end of the vehicular network degrade requests’ performance due to introduced network latency. Consequently, the guarantee of QoS becomes questionable. The delay in the request-response can be life threatening in vehicular networks. For instance, a delay in the response might lead to an accident in autonomous driving. To meet the requirements of real-time and compute-intensive requests in vehicular networks, mobile edge computing (MEC) [
3] has been introduced. MEC provides computing capabilities at the edge of the radio access network close to the mobile vehicles.
MEC pushes the applications and the related services from the distant cloud to the proximity of the vehicles at the edge of the network. MEC servers, deployed within the roadside units (RSUs) in a vehicular network, lead to improved QoS of the vehicles’ requests. This is because the communication latency between the MEC servers (also known as edge servers) and the vehicles is lower compared to that between the cloud servers and the vehicles. However, the edge servers are often becoming bottlenecks with the increasing and rapid services’ demands from the vehicles. This is due to the limited capabilities of the edge servers compared to the cloud ones. Therefore, it becomes necessary to offload requests to edge or cloud servers so that the performance of requests is not compromised [
4].
Several works in the literature have proposed computation-offloading algorithms for vehicular networks. However, very few works focus on optimizing energy consumption. These works focus on optimizing the energy of either the IoT or the edge nodes while offloading tasks. It is important to focus on the energy efficiency of the edge and the cloud servers. This is because the energy consumption of these servers, serving computationally intensive and time-critical applications, is continuously increasing [
5]. To the best of our knowledge, no work in the literature has focused on the energy consumption of the edge and cloud servers, simultaneously, while proposing an offloading algorithm.
In this paper, we propose the Energy-SLA-Aware Edge–cloud Computation Offloading in Vehicular Networks (ESCOVE) algorithm. The algorithm schedules a vehicle’s request either on the edge server, to which the request has been submitted, or to one of the cloud servers. The offloading decision is made in a way that the energy consumption for a request’s execution is minimized, while the request’s service level agreement (SLA) is respected. In this paper, we consider requests’ latencies, processing times, and deadlines (i.e., total execution time) as measures for the SLA. To respect the SLA, requests should be executed within the maximum tolerable latency, processing time, and deadline.
The rest of the paper is organized as follows.
Section 2 presents an overview of related work. We describe the edge–cloud computing system model for vehicular networks in
Section 3.
Section 4 presents our proposed energy-efficient edge–cloud computation offloading algorithm in vehicular networks (ESCOVE). We describe the experimental environment, experiments, and analysis of our results in
Section 5.
Section 6 concludes the paper.
2. Related Work
Several works in the literature proposed computation offloading algorithms in edge–cloud vehicular networks [
6,
7,
8,
9,
10,
11,
12,
13]. However, very few works have focused on the optimization of energy consumption while considering the SLA requirements [
10,
11,
12,
13].
Ning et al. [
10] proposed a computation offloading framework to partially offload computational requests to edge servers. A request is either executed on the edge server to which it has been submitted or is offloaded to other edge servers. The offloading decision is made in a way that the energy consumption of the edge servers is minimized while satisfying the requests’ deadline requirements. The total delay for processing a request is calculated as the summation of the request transmission time from vehicle to RSU, the execution time on the RSU (waiting + service), and the request transmission time among RSUs. The energy consumption is calculated as the summation of the energy consumed for request execution, transmission among RSUs, and transmission of response from RSU to the vehicle. Huang et al. [
11] proposed an offloading algorithm to process requests either locally on the vehicle or to offload them to the edge server. The offloading decision is made in a way that the vehicle’s energy consumption is minimized while respecting the request’s deadline. The speed of the vehicle and the type of request is considered while computing the deadline and energy consumption. Request delay for local computing is calculated as the execution time required to process a request by the vehicle. The delay for edge computing is computed as the summation of the request transmission time between the vehicle and the edge, the processing time at the edge, and the response transmission time between the edge and the vehicle. The energy consumption for local computing is computed for processing by the vehicle and, for offloading, is computed for the transmission of the request and the response.
Huang et al. [
12] proposed an offloading scheme to process requests either locally on the vehicle or to schedule them to an edge server. The offloading decision considers the energy consumption of the vehicles in terms of computation and request transmission, and the packet drop rate. Pu et al. [
13] proposed an offloading algorithm to process the request either locally on the vehicle, or by a group of communicating vehicles, or by the edge server. The proposed algorithm focuses on optimizing the energy consumption of the vehicles involved in the computation process. The optimization is constrained to the request’s deadline and the incentives received by the vehicles for sharing their computational resources.
However, these works [
10,
11,
12,
13] focus on two-tiered architectures, which consist of vehicles as one tier and the MEC-enabled RSUs as the second tier. Moreover, the offloading algorithm proposed in [
10] focuses only on the energy optimization of the edge servers, whereas the ones proposed in [
11,
12,
13] focus on the energy optimization of the vehicles alone. Furthermore, no work considers more than one SLA requirement.
To the best of our knowledge, no work in the literature focuses on energy-efficient computation offloading in a three-tiered (vehicle–edge–cloud) heterogeneous vehicular network while respecting the SLA. In this paper, we propose ESCOVE to offload the vehicles’ requests either to the edge or to the cloud server. The proposed algorithm schedules requests in a way that the energy consumption of a request is minimized while satisfying the SLA requirements. In this paper, we consider request latency, processing time, and deadline as measures for SLA.
3. System Model
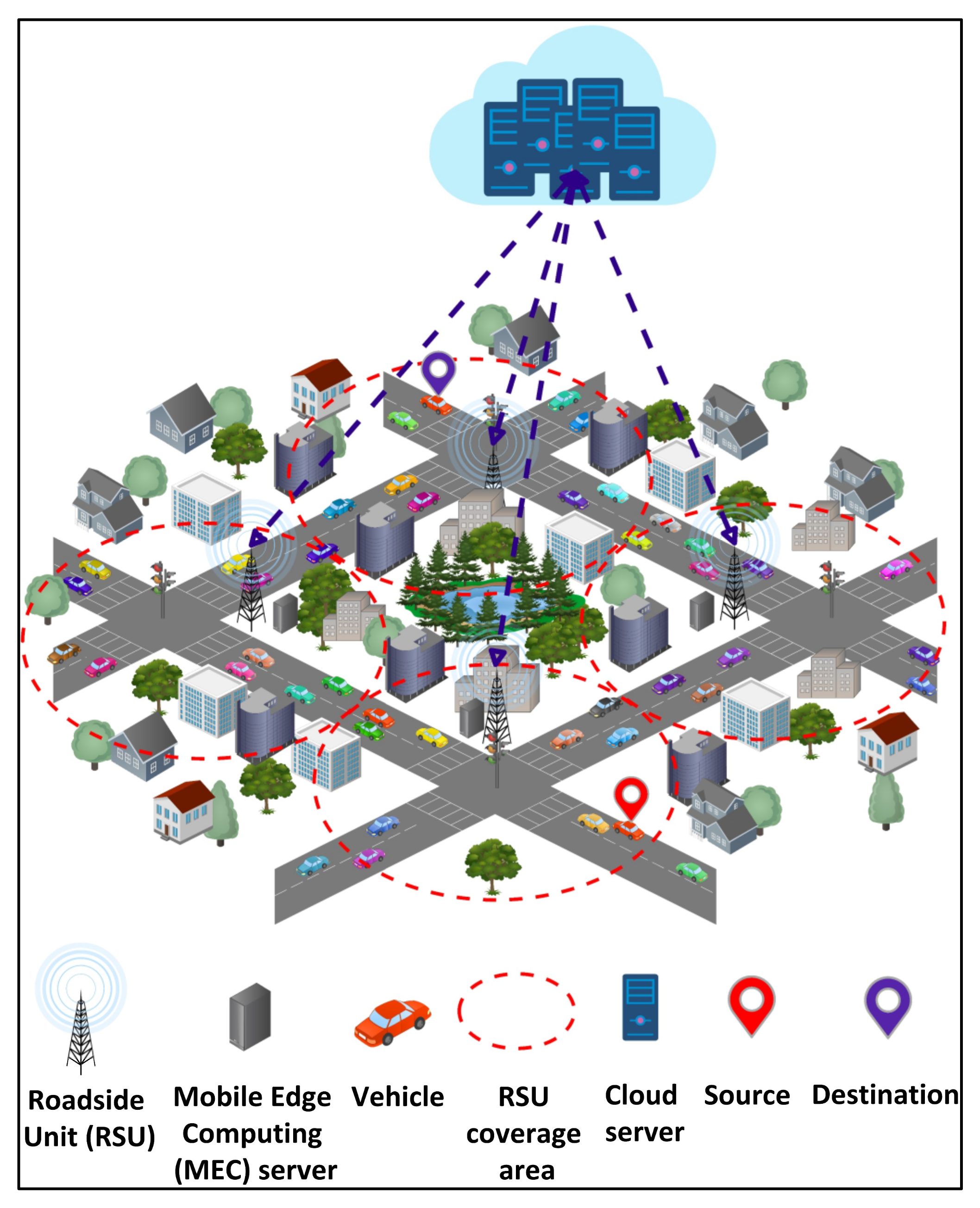
Figure 1 shows an edge–cloud system model for vehicular networks. It consists of several vehicles
, heterogeneous edge servers
, and heterogeneous cloud servers
. The network involves bidirectional traffic flow. The RSUs, with a limited coverage range, are placed along the road. The MEC server within the RSU processes vehicles’ requests. A vehicle can communicate with an RSU only if it is in the coverage range of that RSU. The distance between two RSUs is
. The processing capabilities and storage capacities of the cloud servers are higher than those of the edge servers are. However, the edge servers ensure low latency compared to the cloud servers, enabling real-time processing. This is due to the proximity between edge and vehicles compared to that between cloud and vehicles. Considering the processing and latency tradeoffs between edge and cloud, an offloading algorithm is required. The underlying edge and cloud servers consume a high amount of energy while executing the computationally intensive and time-critical requests from vehicles. Consequently, it becomes crucial to address the issue of edge and cloud energy consumptions.
In our system model, each vehicle sends a request to the communicating RSU for execution. A request i is sent to the RSU as a request message, . The request message is represented as a tuple, . is the length of the request i in terms of million instructions (MI), is the size of request i in terms of bits, is the CPU utilization of i, is the speed of the vehicle, j . is the location (longitude, latitude), which we denote by the source of the vehicle j when submitting the request i, and is the location of the vehicle’s destination. is the maximum tolerable deadline for the execution of i, is the maximum tolerable latency, and is the maximum tolerable processing time.
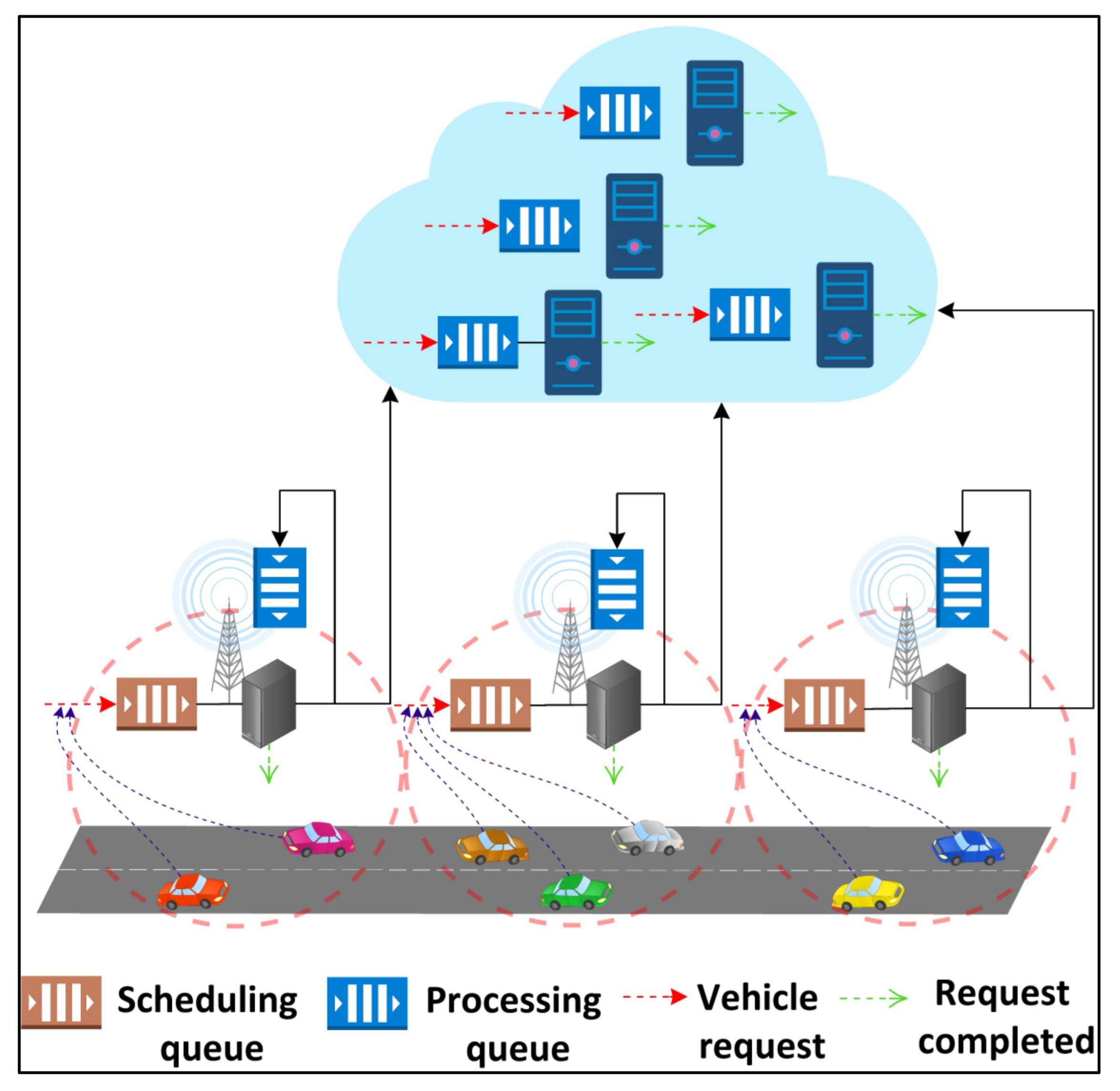
Each edge server consists of two queues, (1) scheduling and (2) processing, as shown in
Figure 2. A vehicle’s request, when submitted, enters the scheduling queue of the connected RSU’s edge server. The scheduling queue decides to either execute the request locally on the server itself or offload it to one of the cloud servers. The offloading decision is made in such a way that the energy consumption of the request execution is minimized while respecting the SLA. If the decision is made to execute the request locally, then the request is submitted to the processing queue of the edge, else to the processing queue of the selected cloud server.
4. ESCOVE: Energy-SLA-Aware Edge–Cloud Computation Offloading in Vehicular Networks
In this section, we present our Energy-SLA-Aware Edge–cloud Computation Offloading in Vehicular Networks (ESCOVE) algorithm, which optimizes the energy consumption of vehicles’ requests while respecting requests’ SLA requirements. Consequently, ESCOVE decides whether to execute a request on an RSU’s edge server or one of the cloud servers.
ESCOVE consists of four steps: (1) calculating a request’s total execution time, latency, and processing time on edge and cloud servers, (2) calculating the corresponding energy consumptions on the servers, (3) scheduling requests to optimal servers in terms of energy while respecting the SLA, and (4) delivering request’s response to the submitter vehicle. This section describes the steps’ methods of computation.
4.1. Total Execution Time, Latency, and Processing Time Computation
In this step, ESCOVE computes a request’s total execution times, latencies, and processing times in case the request runs on the submitted edge server or one of the cloud servers. It then selects the server(s) where SLA is respected, i.e., the total execution time for request i is below , latency is below , and the processing time is below .
4.1.1. Total Execution Time, Latency, and Processing Time for Local (Edge) Computing
In this case, the scheduling queue of the edge server
k decides to process a request
i locally. Consequently, the total execution time
for request
i when executed locally on the edge server
k is computed using Equation (1).
where
is the communication time required to transfer the request message
by the vehicle
j to the edge server
k (Equation (2)).
is the communication time needed to transfer the response of request
i from edge server
k to a cloud server
l (Equation (3)).
is the communication time to transfer the response of the request
i from
l to the edge server
k + h (Equation (3)).
is the communication time to transfer the response of the request
i from
k +
h to
j (Equation (4)).
is the time required to execute the request
i by the edge server
k (Equation (5)). After submitting the request
i to the edge server
k, the vehicle
j might move outside
k’s range depending on the destination and speed of
j. Consequently, the location of
j, while it will receive the response of
i, is estimated by ESCOVE. The vehicle
j will be under the range of RSU
k +
h while receiving the response, i.e.,
RSU after
k on the source to destination path. The estimation of
h is explained in
Section 4.4
where
is the communication bandwidth between vehicle
j and RSU
k,
is the communication bandwidth between the RSU
k and the cloud server
l, and
is the communication bandwidth between RSU
k +
h and vehicle
j. A heterogeneous communication bandwidth between an RSU and the cloud servers is considered.
The time required by the edge server to execute the request is calculated using Equation (5).
where
is the time required to schedule the request
i by the scheduling queue of edge server
k.
is the time required to execute the request
i by the processing queue of
k.
is calculated using Equation (6),
where
is the waiting time of
i in the scheduling queue of the edge server
k (Equation (7)) and
is the processing time required to make the offloading decision by the scheduling queue. The value of
is considered constant in the infrastructure under study. The waiting time in the scheduling queue is calculated as follows.
where
is the inter-arrival time between the requests
i and
i − 1 at the scheduling queue of the edge server
k.
The processing time of request
i at the processing queue of edge server
k is calculated using Equation (8),
where
is the waiting time of
i in the processing queue of edge server
k (Equation (9)) and
is the request execution time in the processing queue of edge server
k (Equation (10)). Consequently
where
is the processing speed of the edge server
k in million instructions per second (MIPS).
The latency of the request in the case of local computing is calculated using Equation (11) and the processing time is calculated using Equation (12).
4.1.2. Total Execution Time, Latency, and Processing Time for Cloud Computing
In this case, the scheduling queue of edge server
k decides to offload the request
i to the cloud and process it on the cloud server
l. The total execution time
for request
i when offloaded and executed on
l is computed using Equation (13).
where
is the time required to execute the request
i on
l when offloaded by the edge server
k (Equation (14)).
where
is the time required to execute
i by the processing queue of
l. It is calculated using Equation (15).
where
is the waiting time of
i in the processing queue of
l (Equation (16)) and
is the request execution time in the processing queue of
l (Equation (17)).
where
is the communication time required to transfer the request message of
i from edge server
k to
l (Equation (18)) and
is the processing speed of the cloud server
l in MIPS.
The latency of the request when offloaded to the cloud is calculated using Equation (19) and the processing time is calculated using Equation (20).
4.2. Energy Consumption Computation
In this step, ESCOVE computes the energy consumption of a request’s execution on the servers where the SLA is respected. The energy consumptions for making the offloading decision and for the communication of request and response are not considered in this paper. The energy consumed for processing request
i is given by Equation (21).
where
is the power consumed by server
x while processing the request
i. We use locally corrected linear regression (LC-LR) [
14] to estimate the power consumption of server
x while executing request
i. LC-LR is the summation of the classical linear regression model and an error correction term as stated in Equation (22).
where
is the predicted power consumption for request
i using the linear regression power model (Equation (23)) for the server
x and
is the error correction term for
i on server
x (Equation (24)). In this paper, we consider a power prediction model based only on the CPU utilization of the server. This is because the CPU is considered to be the most dominant power consumer in a computing server [
5].
where
and
are the regression coefficients of the linear regression model for server
x. The coefficients’ values for a server
x are obtained using a training dataset consisting of the CPU utilization values and the corresponding power consumption values. The error correction term corresponding to
is calculated, as stated in Equation (24), by constructing a linear line between the CPU utilization values
and
from the training dataset such that
.
where
is the intercept and
is the slope of the constructed linear model.
4.3. Request Scheduling and Execution
In this step, ESCOVE will schedule a request to the server having the minimum request execution energy consumption (Equation (21)) among those where the request’s SLA is respected. The request will be executed on the scheduled server. If no server can satisfy the request’s SLA requirements, then the request is processed on the server where the total execution time is minimized.
4.4. Request-Response Delivery
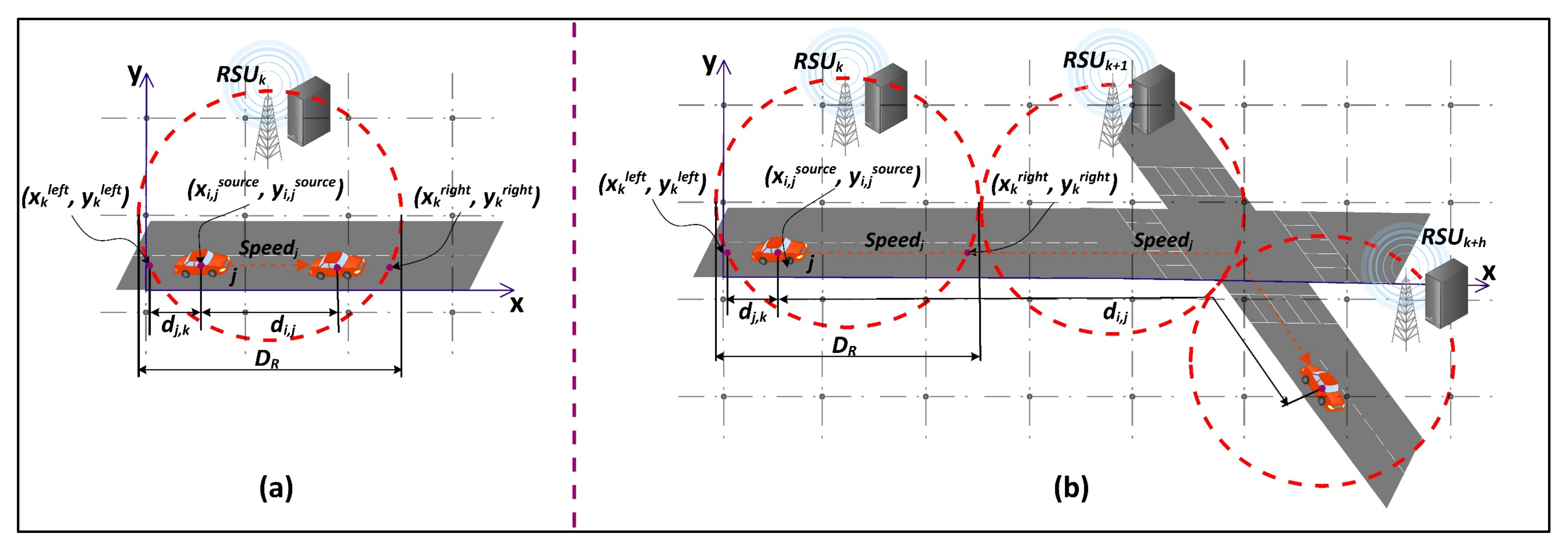
In this step, ESCOVE will send a request-response back to the vehicle after a request has been executed. The algorithm first estimates the position of the vehicle
j while receiving the request-response. The vehicle can be in the range of RSU
k where the request was submitted (
Figure 3a) or it can be out of the range of
k (
Figure 3b). To determine the position of
j, the server
x executing the request will calculate: (1) the distance
that
j traveled in the range of
k before submitting the request
i (Equation (25)), and (2) distance
traveled by
j during the time the request is being executed (Equation (26)).
The vehicle
j will be in the range of server
k if
, otherwise, it will be outside the range of
k. If
j is in the range of
k and
i is executed by
k, then the request-response will be directly transmitted from
k to
j. If
j is in the range of
k and
i is executed by
l, then the request-response will be transmitted from
l to
k and then from
k to
j. If
j is outside the range of
k, then the algorithm will determine the value of
h, such that the vehicle will be in the range of RSU
k +
h while receiving the response. The value of
h is computed using Equation (27).
The objective of the ESCOVE algorithm is thus defined as the minimization of the energy consumption (Equation (28)) subject to the following constraints: (1) the total execution time of the request should be less than or equal to the maximum permissible delay (deadline) (Equation (29)), (2) the request’s latency should be less than or equal to the maximum permissible latency (Equation (30)), and (3) the request’s processing time should be less than or equal to the maximum permissible processing time (Equation (31)).
Constraints:
where
is the maximum delay for request
to be serviced,
and
are the maximum latency and processing required for QoS respectively.
ESCOVE algorithm offloads vehicle’s requests as follows:
- ⮚
A vehicle submits a request to the RSU which is in the vehicle’s range.
- ⮚
The RSU’s edge server computes the latency, processing and total execution times of the request on itself and all the cloud servers.
- ⮚
The edge server selects a group of the servers where the request’s constraints, i.e., latency, processing time, and deadline, are satisfied. If no server satisfies the constraints, then the request will be offloaded for execution to the server resulting in the minimum total execution time.
- ⮚
If there exists a group of servers satisfying the constraints, then the edge server computes the energy consumption for processing the request on each of the selected servers in the group.
- ⮚
The edge server then offloads the request to the server that has the minimum energy consumption.
- ⮚
The server which is processing the request estimates the location of the vehicle at the time the vehicle receives the response. It then sends the response to the vehicle’s corresponding RSU.
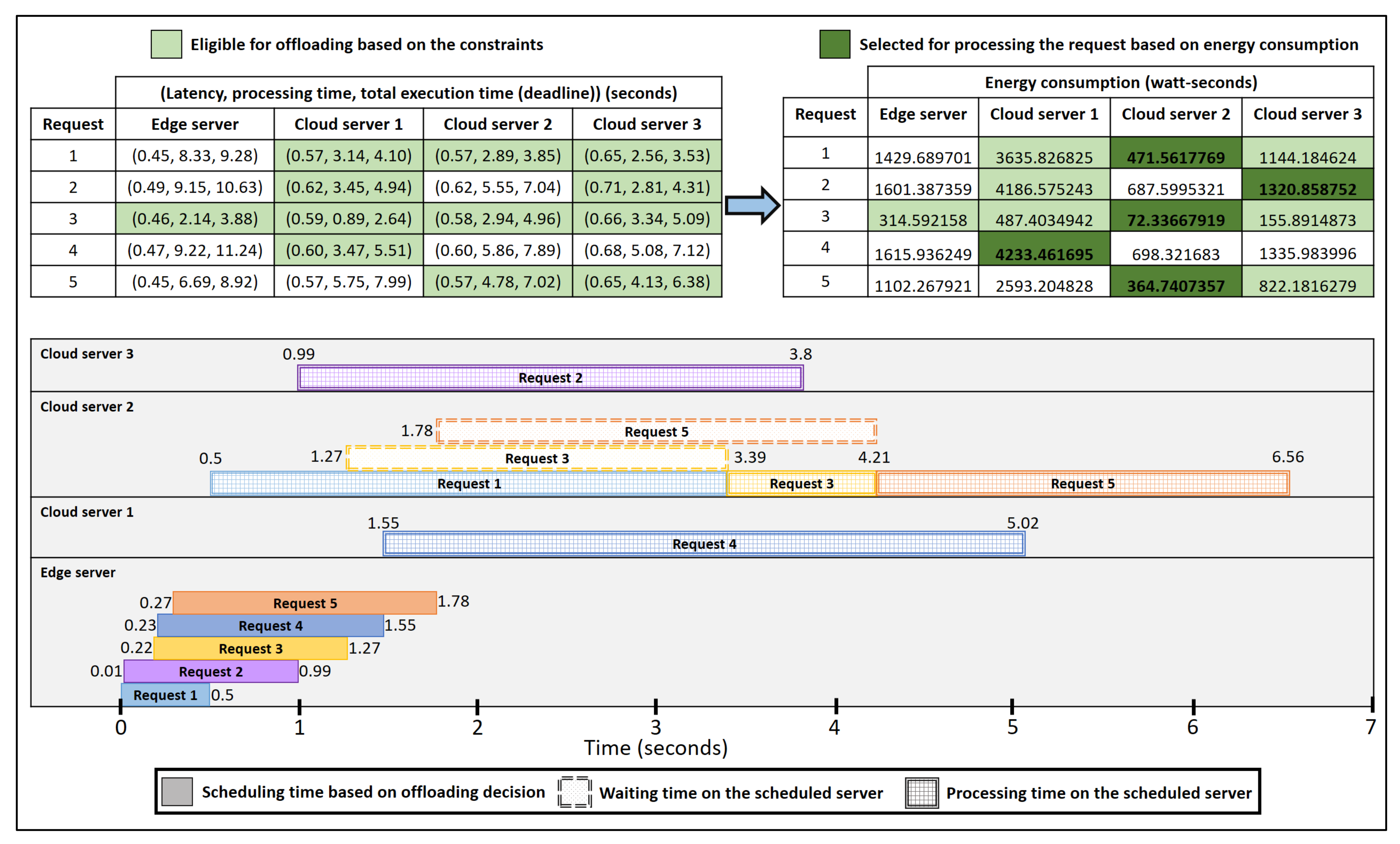
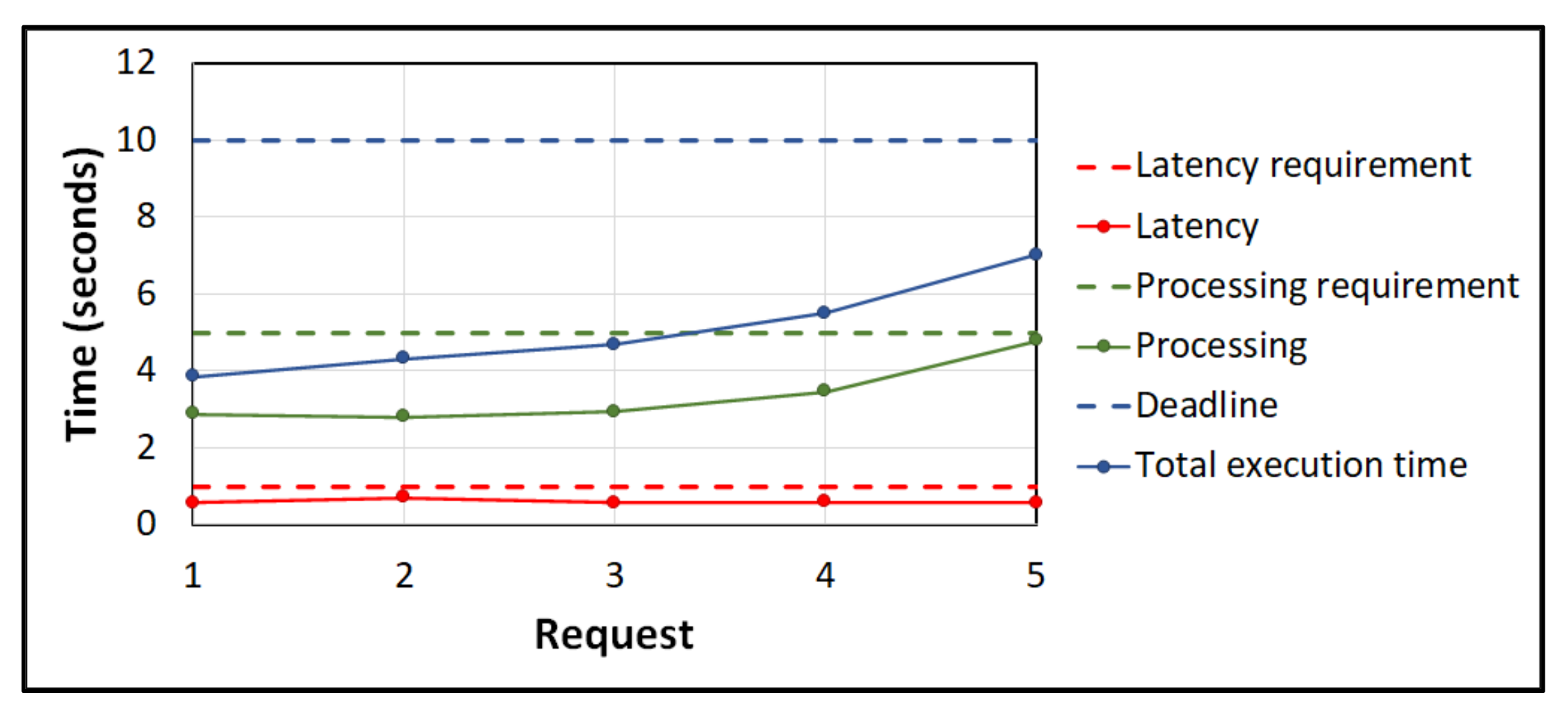
Figure 4 shows the Gantt chart of offloading requests using ESCOVE. In this example, the vehicular network consists of one edge and three cloud servers. The specifications of requests are stated in
Table 1. In the example, the latency, processing time, and deadline requirements for requests are considered as 1 s, 5 s, and 10 s respectively. The power consumption values of requests on the edge and cloud servers are presented in
Table 2.
When a vehicle submits request 1 to the edge server, a request enters the scheduling queue of the server. The server computes the latency, processing and total execution times of the request on itself and all the cloud servers. A group of servers is then selected where the SLA requirements are satisfied, i.e., cloud server 1, cloud server 2, and cloud server 3, as represented in
Figure 4. The edge server then computes the energy consumption of processing the request on the selected group. The request is then offloaded to the server where the energy consumption is minimized, i.e., the cloud server 2 (
Figure 4). The time to make the offloading in the scheduling queue of the edge server is considered 0.5 s. Requests 2, 3, 4, and 5 are offloaded similarly.
As shown in the figure, request 1 is offloaded to the cloud server 2 at 0.5 s after the offloading decision is made by the edge server. The processing of request 1 on cloud server 2 ends at 3.39 s. When request 2 arrives at the scheduling queue of the edge server at 0.01 s, it waits in the queue as request 1 is being processed. The offloading decision for request 2 is made at 0.99 s by the edge server, and the request is offloaded to cloud server 3. The processing of request 2 ends at 3.8 s. Similarly, request 3 is offloaded at 1.27 s by the edge server to cloud server 2. As request 1 is still being processed at cloud server 2, request 3 will wait in the processing queue of the server. Once the processing of request 1 completes, the one for request 3 starts at 3.39 s and lasts till 4.21 s. Request 4 is offloaded to cloud server 1 by the edge server at 1.55 s. Request 5 is offloaded to cloud server 2 at 1.78 s. Request 5 waits in the processing queue of the cloud server 3 till requests 1 and 2 are processed.
Figure 5 shows the latency, processing and total execution times for the five requests used in the example. In addition, the latency, processing time, and deadline requirements are also represented. The figure shows that all the three SLA requirements are satisfied using the ESCOVE algorithm.
5. Performance Evaluation
In this section, we describe the experimental environment and the experiments performed to evaluate our proposed algorithm, ESCOVE. We then analyze and give insights on the obtained numerical results. We evaluate the performance of ESCOVE in a heterogeneous edge–cloud vehicular network in terms of energy consumption, latency, processing time, execution time, and percentage of SLA violations (SLAVs).
5.1. Experimental Environment
To evaluate the performance of ESCOVE, we create a heterogeneous edge–cloud vehicular network consisting of 10 RSUs (edge servers) of 3 different types and 20 cloud servers of 3 different types. The network is implemented using MATLAB 2020a [
15]. The specifications of the servers’ types are presented in
Table 3. Servers 1 and 2 from the edge servers are part of our Intelligent Distributed Computing and Systems (INDUCE) research laboratory at the College of Information Technology of the United Arab Emirates University. The specifications of servers 3–6 are taken from the SPEC Power benchmark suite [
16] in a way that they belong to the same family of the servers present in the laboratory, but with different architectures and resource capabilities.
To develop the LC-LR power model for each server type, we use a dataset consisting of CPU utilization values of a server and the corresponding power consumption. For servers 1 and 2, we run CPU Load Generator [
21] to stress the CPU and measure the values of CPU utilization and corresponding power consumption. CPU Load Generator is a tool that allows generating a fixed CPU load for a finite user-defined duration. To measure the values of power consumption, we use a 4-channel digital oscilloscope, Tektronix—TBS2000 100 MHz with 1 GS/s of sampling [
22]. We connect the oscilloscope to a current probe [
23] and a voltage probe [
23] to measure the server’s current and voltage respectively. The current and voltage values are extracted from the oscilloscope using the LabVIEW program [
24]. The power consumption is then computed as the product of current and voltage. For servers 3–6, the values of CPU utilization and corresponding power consumption are obtained from SPEC Power.
To obtain the position of vehicles in the simulated network, we use the Vehicle-Crowd Interaction (VCI)—DUT dataset [
25]. We use the x_est and y_est columns of the dataset, representing the estimated vehicles’ position, as the source location of the vehicles in our experiments.
Table 4 shows the experimental parameters. The value for RSU transmission power for the MEES algorithm is based on the literature [
10]. The latency requirement [
26] and the processing time and deadline requirements [
27] for the request are based on the literature.
5.2. Experiments
The set of experiments performed to obtain the CPU utilization and power consumption datasets for servers 1 and 2, and to simulate the edge–cloud vehicular network for implementing ESCOVE are explained in this section.
To obtain the datasets for serves 1 and 2, we stress the CPU load generator on each server to generate a CPU load between 0–100% for five minutes at an interval of 10%. We measure the CPU utilization and the corresponding power consumption values for each generated CPU load at every second and write them to a file. The values are then averaged. We repeat the experiment for each CPU load five times and average all the averages.
Table 5 shows the values of CPU utilization and corresponding power consumption for servers 1–6.
To evaluate the performance of ESCOVE, we simulate an edge–cloud vehicular network with 1000 vehicles [
28]. The network consists of 10 edge servers, with edge servers’ types (
Table 1) equally distributed, and 20 cloud servers, with cloud servers’ types (
Table 1) equally distributed. For the source locations of the vehicles, we take the first 1000 locations from the VCI—DUT dataset. For the geographical location of the RSUs (edge servers), we randomly generate the x and y coordinates between the minimum and the maximum x and y coordinates values of the vehicles in a way that the RSUs are equidistant from each other. Each vehicle in the network generates a request. Requests arrive at the edge servers with a mean arrival rate of 10 requests per second [
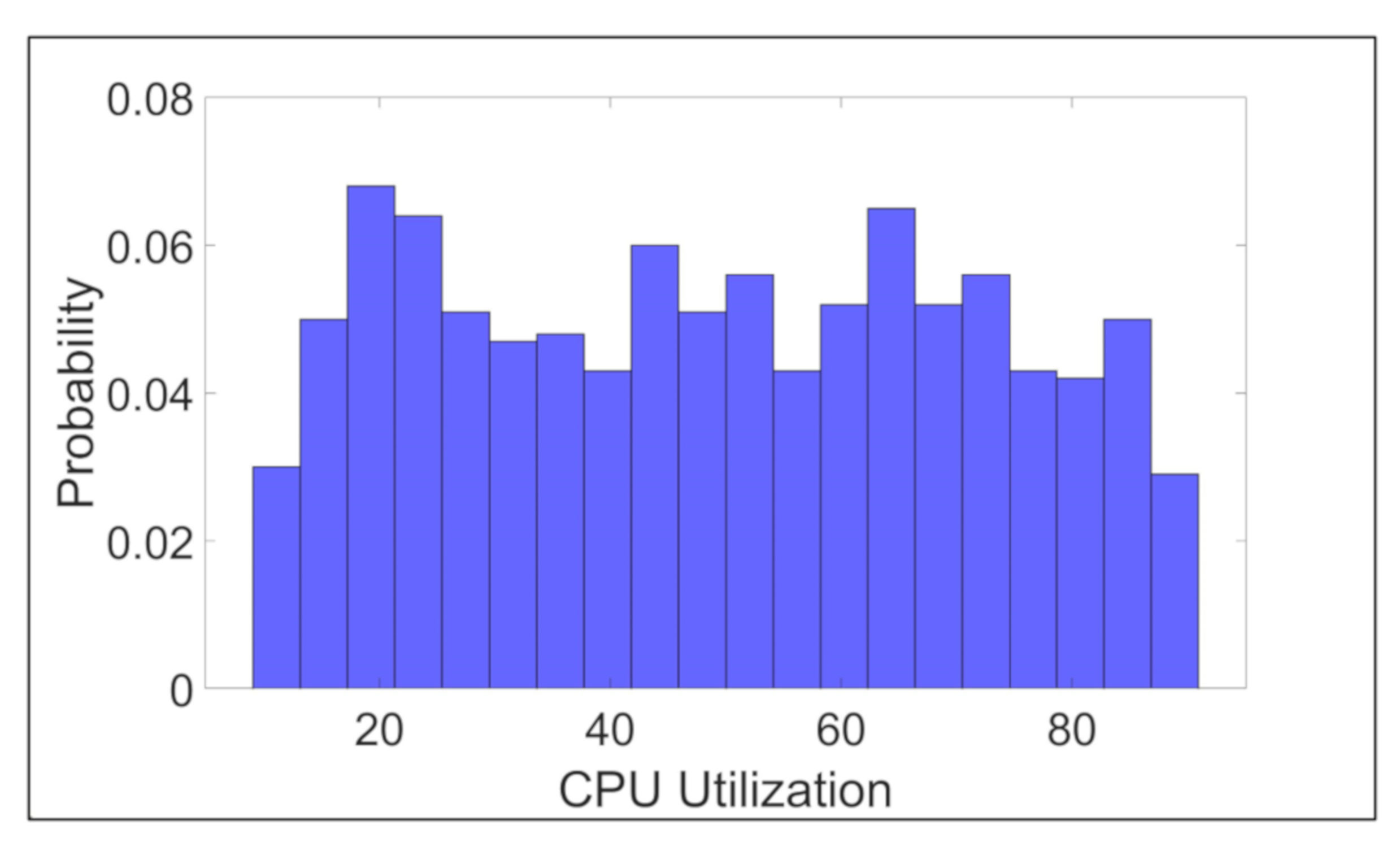
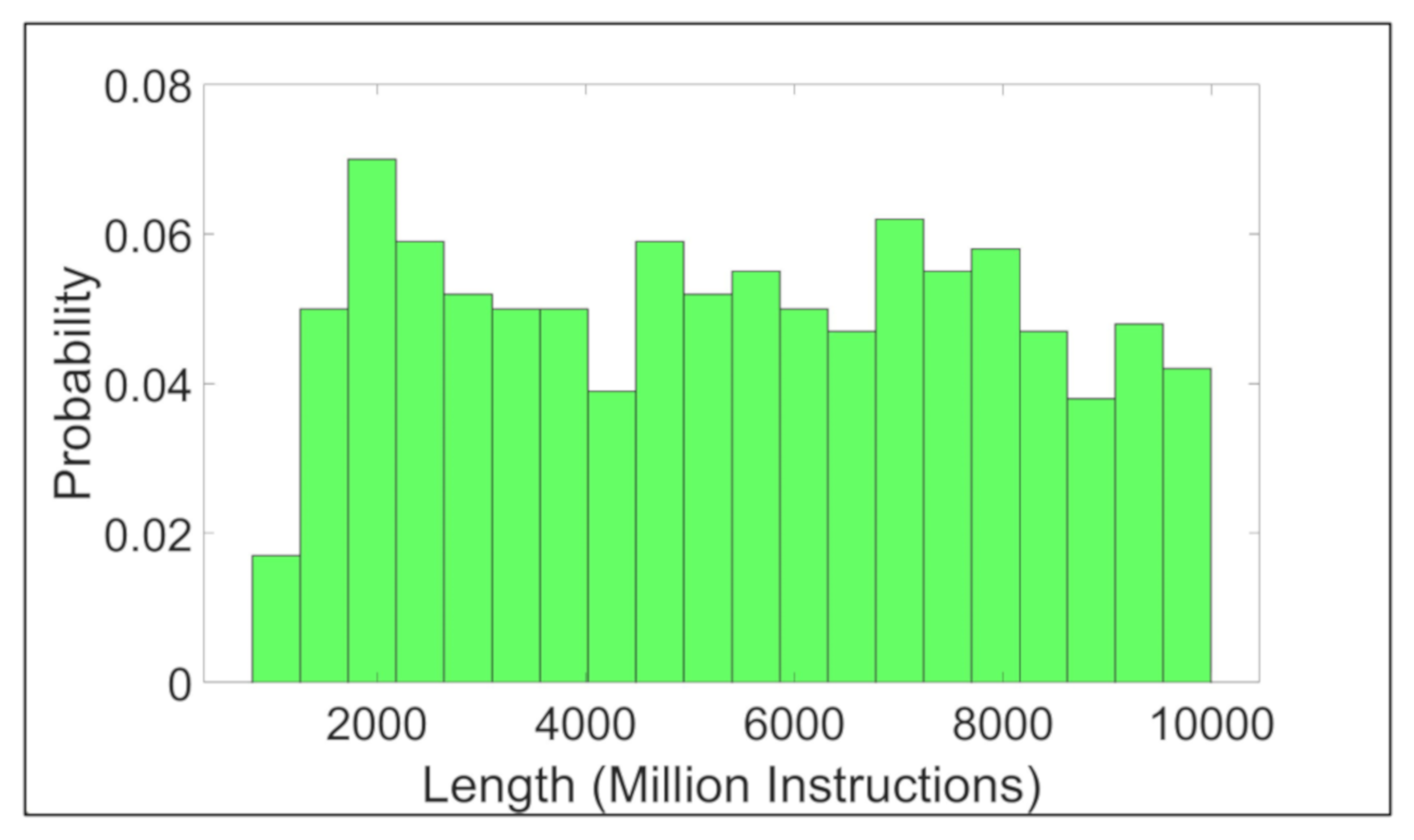
29]. For each vehicle’s request, we randomly generate a CPU-utilization value and request length (MI). CPU utilization is generated between the minimum and maximum CPU-utilization values. The length is generated between the minimum and maximum request-length values.
Figure 6 shows the probability distribution of the CPU utilization values for the generated requests.
Figure 7 shows the probability distribution of the generated requests’ lengths.
In our experiments, for each vehicle’s request arriving at the connected edge server, the server computes the energy consumption of requests on all servers (edge and the cloud) where requests’ SLA requirements are satisfied. A request is then scheduled for execution on the server where the energy consumption is minimized. If none of the servers can satisfy the SLA requirements, then the request will be scheduled to the server where the total execution time is minimized. We measure the energy consumption, latency, processing time, and total execution time for each request. We also compute the total energy consumption as the sum of the energy consumption of each request and the percentage of SLAVs (Equation (32)).
To demonstrate the performance of ESCOVE, we compare it with a state-of-the-art algorithm:
MEC-enabled Energy-Efficient Scheduling (MEES): A scheduling scheme that schedules the vehicles’ requests either to the communicating edge server or offloads them to other edge servers via multi-hop requests transmission. The scheduling decision is made in a way that the energy consumption of the edge servers is minimized under deadline constraints. If no edge servers satisfy the SLA requirements for a request, then the request is scheduled to the server providing the minimum execution time.
In addition, we compare the performance of ESCOVE with the following two approaches:
Random Non-SLA-Aware (RNSA) offloading: An offloading scheme that schedules the vehicles’ requests randomly to the edge server (to which a vehicle submits the request) or a cloud server without considering the SLA constraints.
Random SLA-Aware (RSA) offloading: An offloading scheme that schedules the vehicles’ requests randomly to the edge server (to which a vehicle submits the request) or a cloud server considering the SLA constraints.
We repeat the experiments with MEES, RSA, and RNSA approaches, and measure the energy consumption of each request, latency, processing and total execution times for each request, total energy consumption, and percentage of SLAVs.
5.3. Experimental Results Analysis
In this section, we analyze and compare the performance of our proposed ESCOVE offloading algorithm with the MEES, RSA, and RNSA approaches.
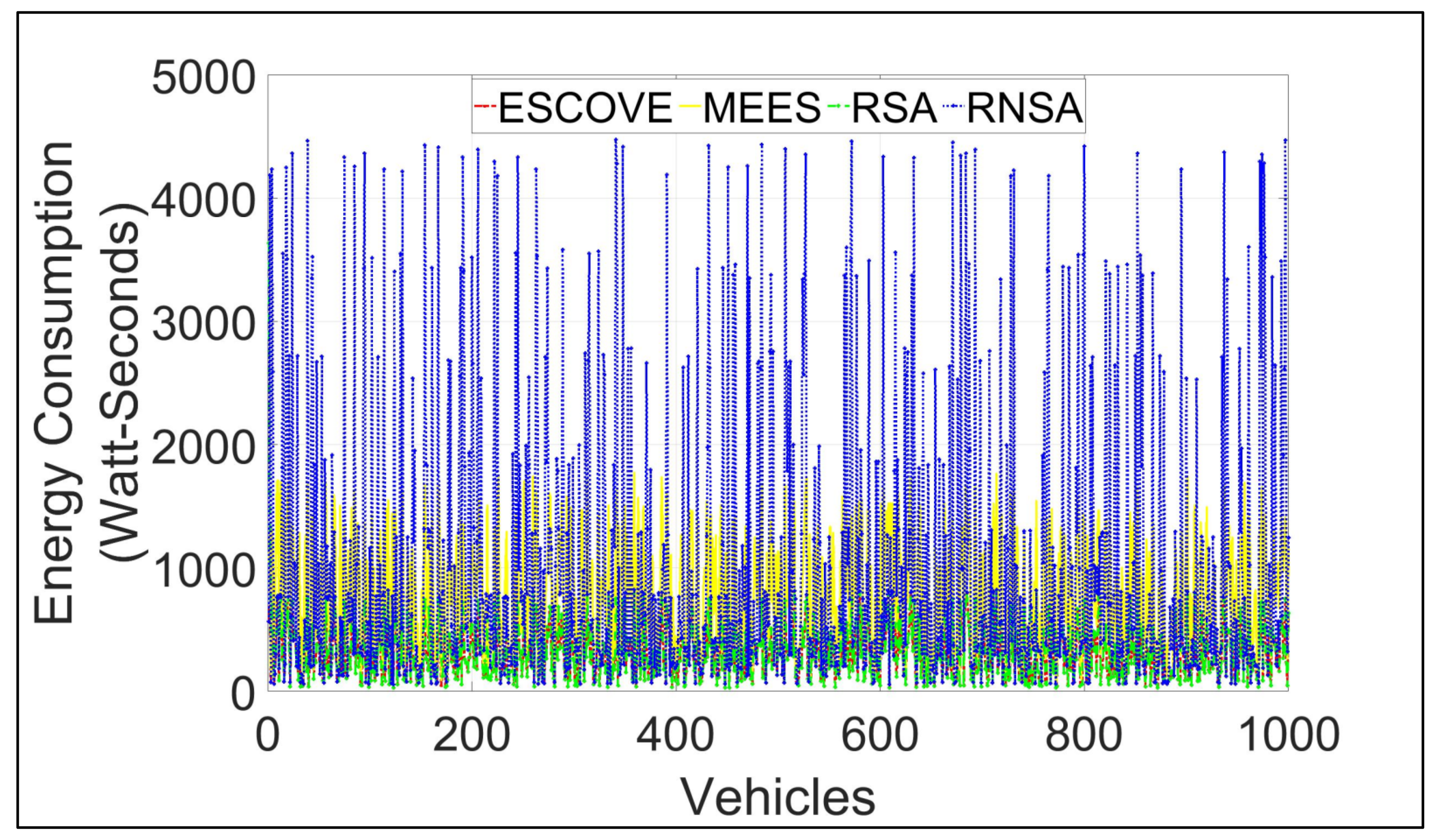
Figure 8 shows the energy consumption of the vehicles’ requests using ESCOVE, MEES, RSA, and RNSA. It shows that the overall energy consumption of ESCOVE is minimized. This is because of the energy optimization objective of ESCOVE that schedules the vehicles’ requests in a way that the energy consumption for each request’s execution is minimized. The energy consumption of MEES is more than that of ESCOVE as MEES schedules requests only on the edge servers without involving the cloud. Consequently, the processing of requests requires more time using MEES, leading to higher energy consumption. In addition, the energy consumption of RSA is less than that of MEES, even though the former is non-energy-efficient. This is because of the inclusion of the cloud in RSA for processing requests, leads to less time and thus less energy consumption. The energy consumption of RNSA is the maximum. This is because RNSA randomly schedules requests without considering the SLA. Consequently, a request’s execution time in RNSA is greater compared with MEES and RSA. This leads to higher energy consumption, as the energy consumed by a request is a function of its execution time.
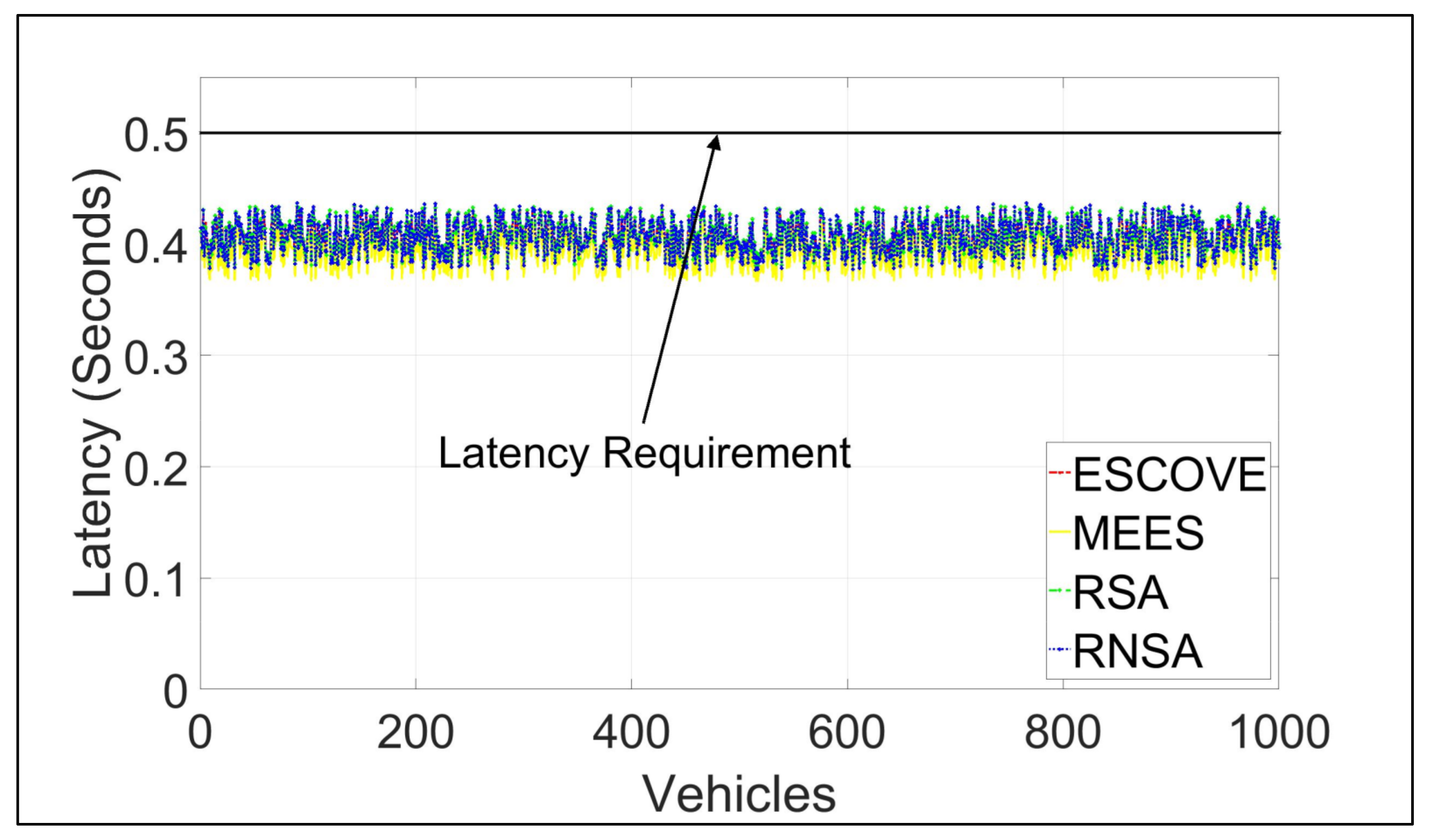
Figure 9 shows the latencies of requests using ESCOVE, MEES, RSA, and RNSA. It shows that latencies using all the algorithms are below the permissible latency requirement of 500 milliseconds. The figure shows that requests’ latencies using the MEES are lower compared to other algorithms. This is because, MEES considers only the edge layer for scheduling requests, while ESCOVE, RSA, and RNSA consider both edge and cloud layers. The inclusion of a cloud layer in the latter results in higher latency.
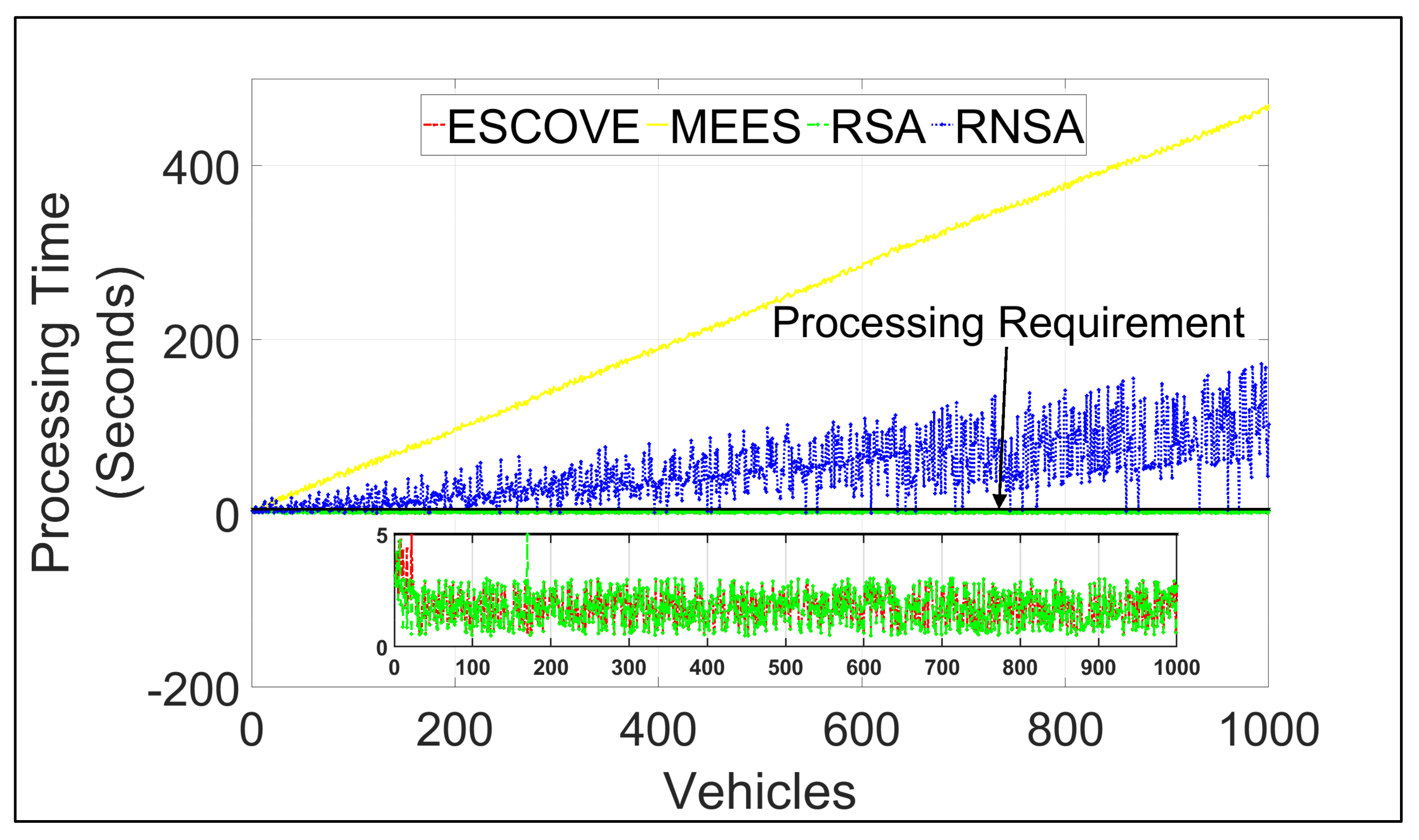
Figure 10 shows requests’ processing times using ESCOVE, MEES, RSA, and RNSA. It shows that processing times for all requests using ESCOVE and RSA are below the maximum permissible processing time of 5 s. This is because of the processing time constraint consideration in the algorithms while scheduling requests. A zoomed-in image for the processing times using ESCOVE and RSA has been presented in the figure for clarity. Regarding the MEES and RNSA, not all requests meet the processing time constraint. This is because, the requirement is not considered in RNSA, while for the MEES only the edge servers are not able to respect the processing time requirement. The processing time in MEES increases with increasing vehicles as requests’ waiting times increases.
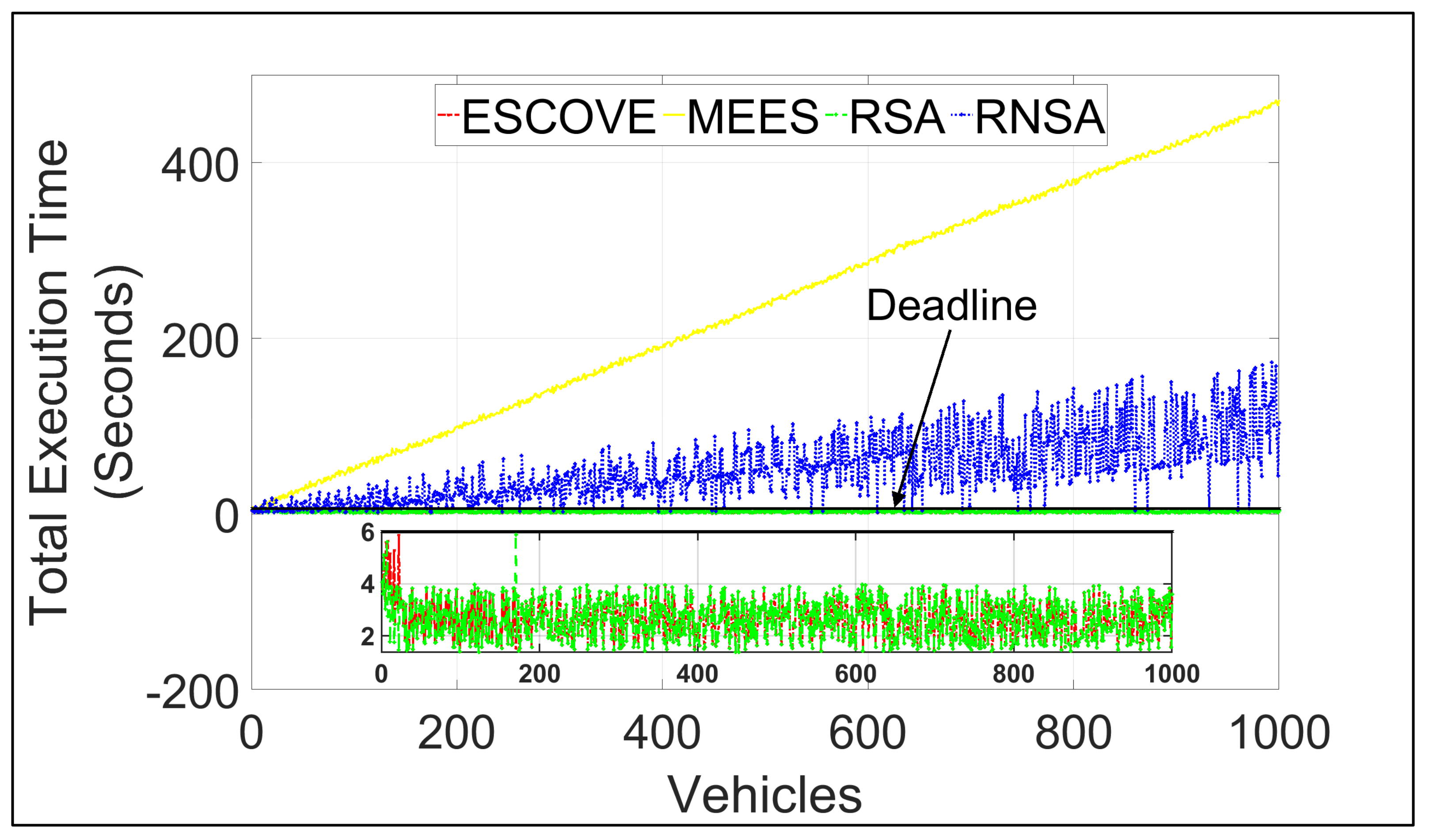
Figure 11 shows the total execution time of requests using ESCOVE, MEES, RSA, and RNSA. It shows that execution times for all requests using ESCOVE and RSA are below the acceptable deadline. This is because of the deadline constraint considered in the algorithms while scheduling requests. The execution times of ESCOVE and RSA are zoomed in for clarity in the figure. MEES and RSA do not satisfy the deadline constraint. This is because for MEES, the edge servers are not able to process requests in the given deadline, and for RSA the deadline constraint is not considered. The execution using MEES increases with increasing vehicles due to increasing waiting time at the edge servers.
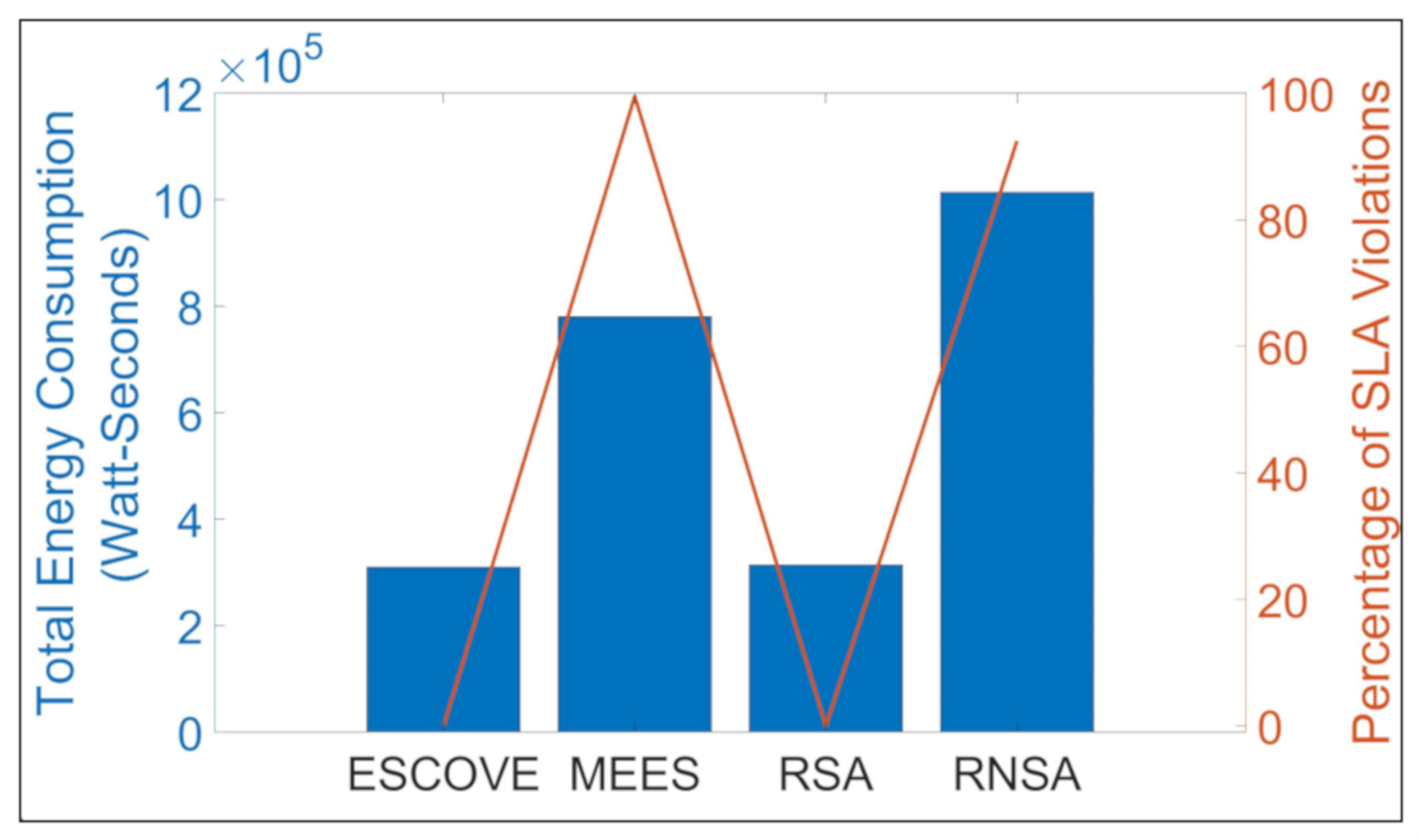
Figure 12 shows the total energy consumption of all requests and percentage of SLAVs using ESCOVE, MEES, RSA, and RNSA. It shows that ESCOVE has the least energy consumption with 0% of SLAVs. The SLAVs using RSA is also 0%, but the energy consumption is more compared to that of ESCOVE. The energy consumption of MEES is higher than that of ESCOVE and RSA, and the percentage SLAVs is 99.5%. The RNSA approach has the worst performance in terms of total energy consumption. The percentage SLAVs using RNSA is 92.4%.
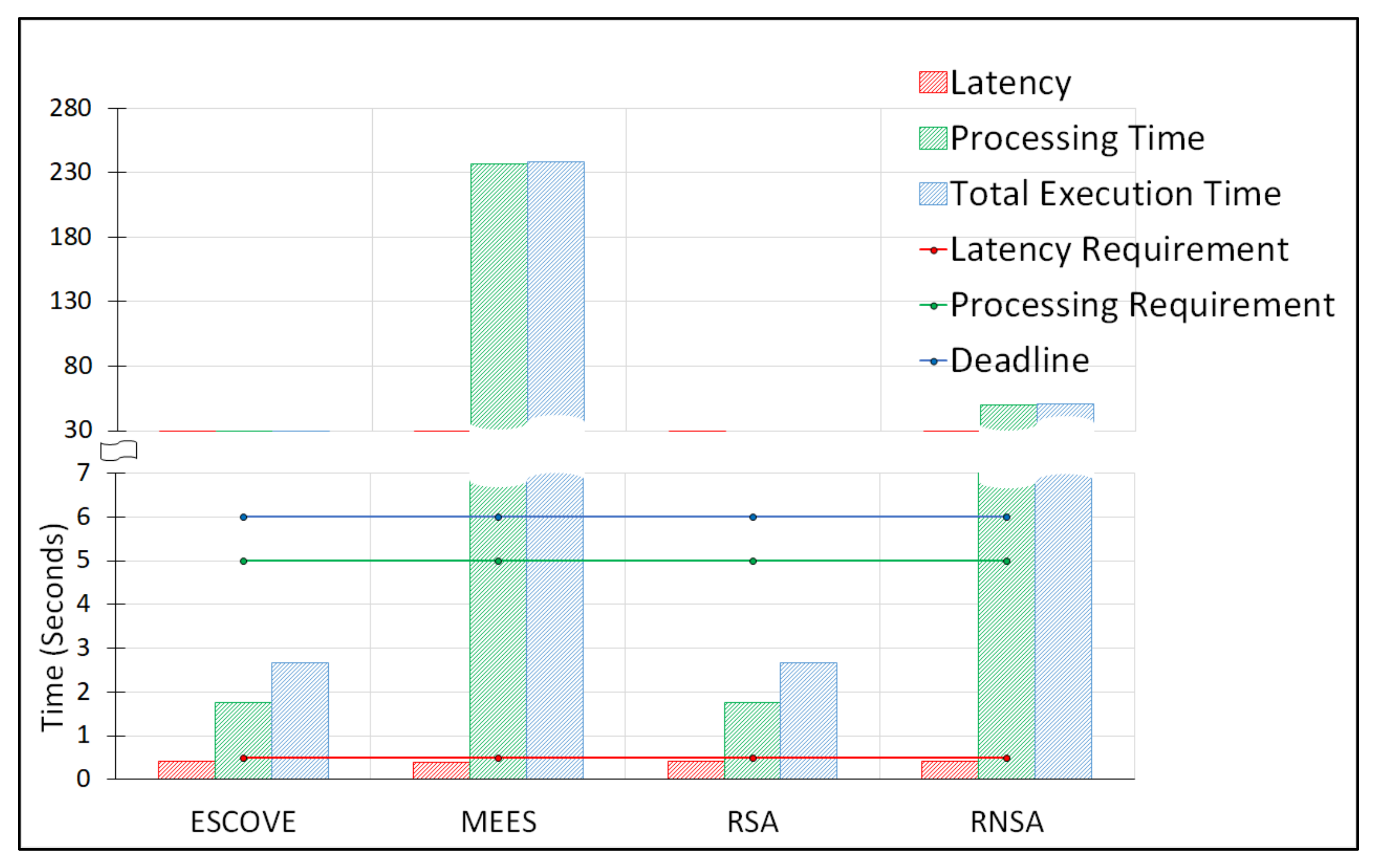
Figure 13 shows the average latency, processing and total execution times for the algorithms. It shows that the average latency of all the algorithms is below the permissible latency requirement. Regarding the processing and total execution times, the values for ESCOVE and RSA are below the corresponding permissible limit. However, for MEES and RNSA, the processing time and deadline constraints are not satisfied.
In summary, ESCOVE saves 60.26% of total energy consumption compared to MEES, 1.47% compared to RSA, and 69.44% compared to RNSA, with no SLAVs.
6. Conclusions
Energy-efficient computation offloading is important in edge–cloud vehicular networks for executing computationally intensive and time-critical vehicles’ requests respecting the SLA. In this paper, we propose the Energy-SLA-Aware Edge–Cloud Computation Offloading in Vehicular Networks (ESCOVE) algorithm. The proposed algorithm schedules a vehicle’s request to either an edge server or to a cloud server in a way that the energy consumed to execute the request is minimized and the request’s SLA requirements are satisfied. To the best of our knowledge, we are the first ones to propose an energy-SLA-aware offloading algorithm that optimizes the energy consumption of the edge as well as the cloud servers, considering latency, processing time, and deadline constraints. We compared the performance of ESCOVE with one state-of-the-art algorithm, MEES, and two offloading approaches, RNSA and RSA, in terms of a request’s energy consumption, latency, processing and total execution times, total energy consumption for all requests, and the percentage of SLAVs. Our experimental results reveal that ESCOVE outperforms the state-of-the-art algorithm and other approaches in terms of energy consumption as well as SLAVs.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}