
Simultaneous Target Classification and Moving Direction Estimation in Millimeter-Wave Radar System


Abstract
:1. Introduction
- We obtained the point cloud-based object detection result using a high-resolution radar system, and proposed a method to convert it into an image format suitable for training the CNN-based classifier.
- Based on the high-resolution radar sensor data, we designed a deep learning-based classifier that can determine the type of detected object and estimate its moving direction as well. In conventional studies, classifiers that perform only a single purpose have been proposed.
- In conventional radar systems, target detection, point clustering, and target tracking are sequentially performed to estimate the moving direction of an object. The proposed method can determine the moving direction of the object by using only the target detection results.
2. Basic Principles of Millimeter-Wave FMCW Radar System
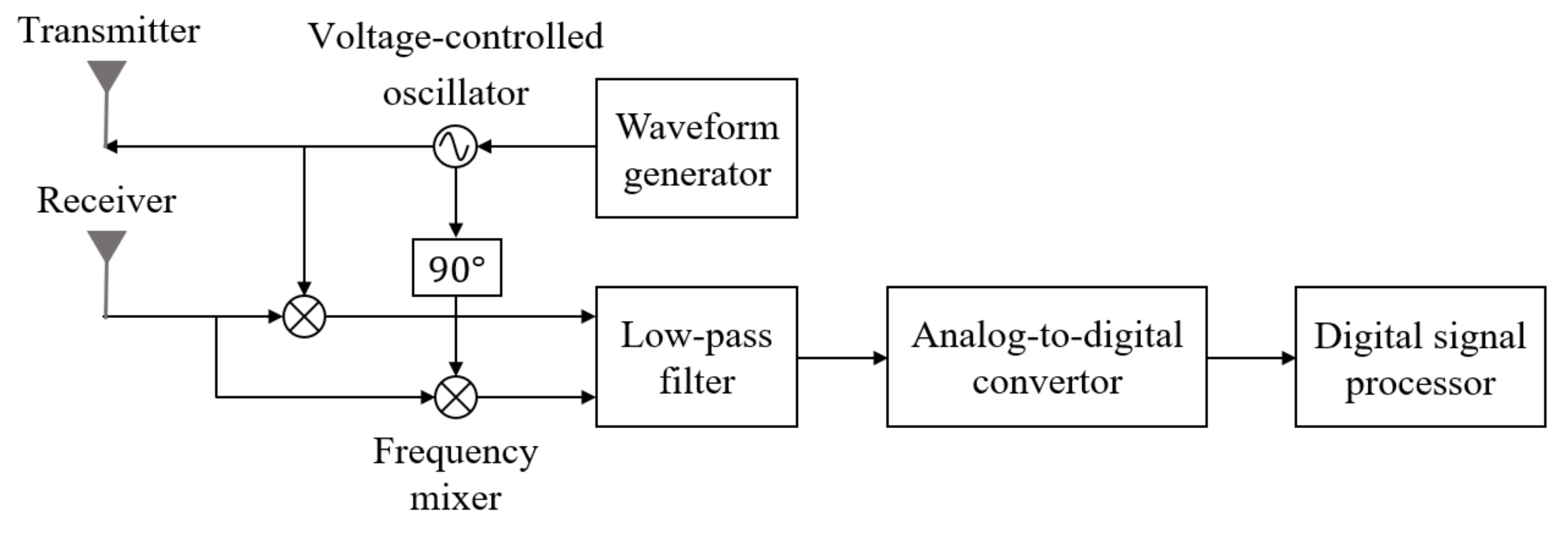
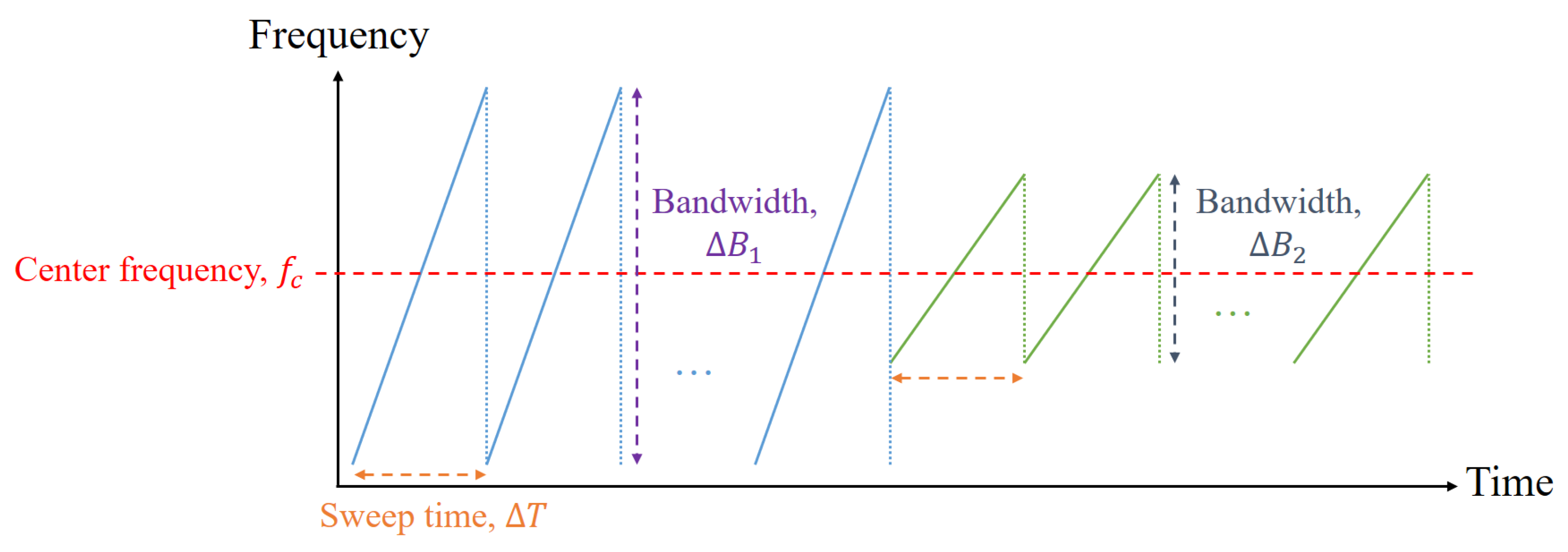
2.1. Millimeter-Wave Band FMCW Radar Sensor
2.2. Distance, Velocity, and Angle Estimation in FMCW Radar System
3. Target Image Generation in Radar System
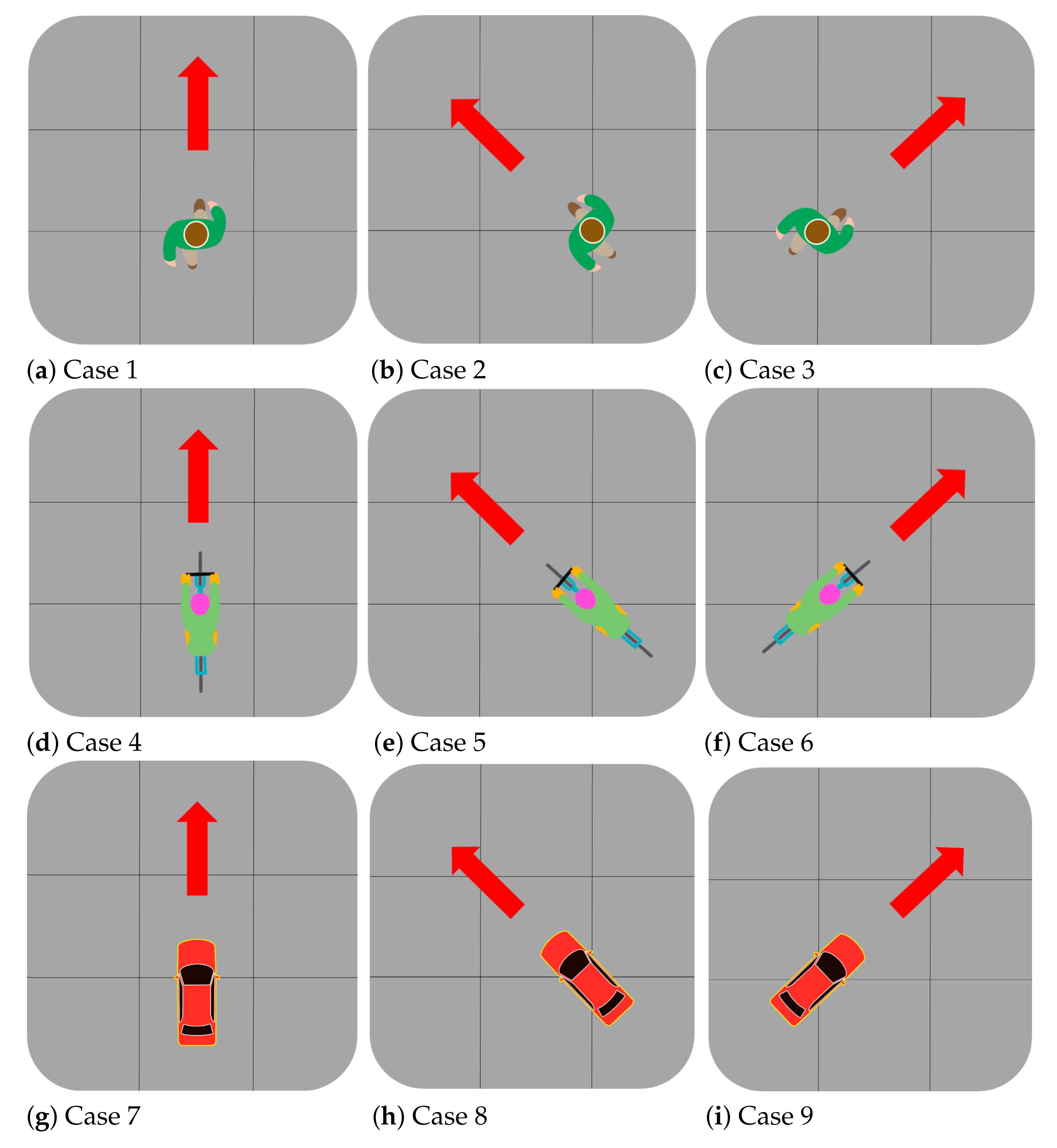
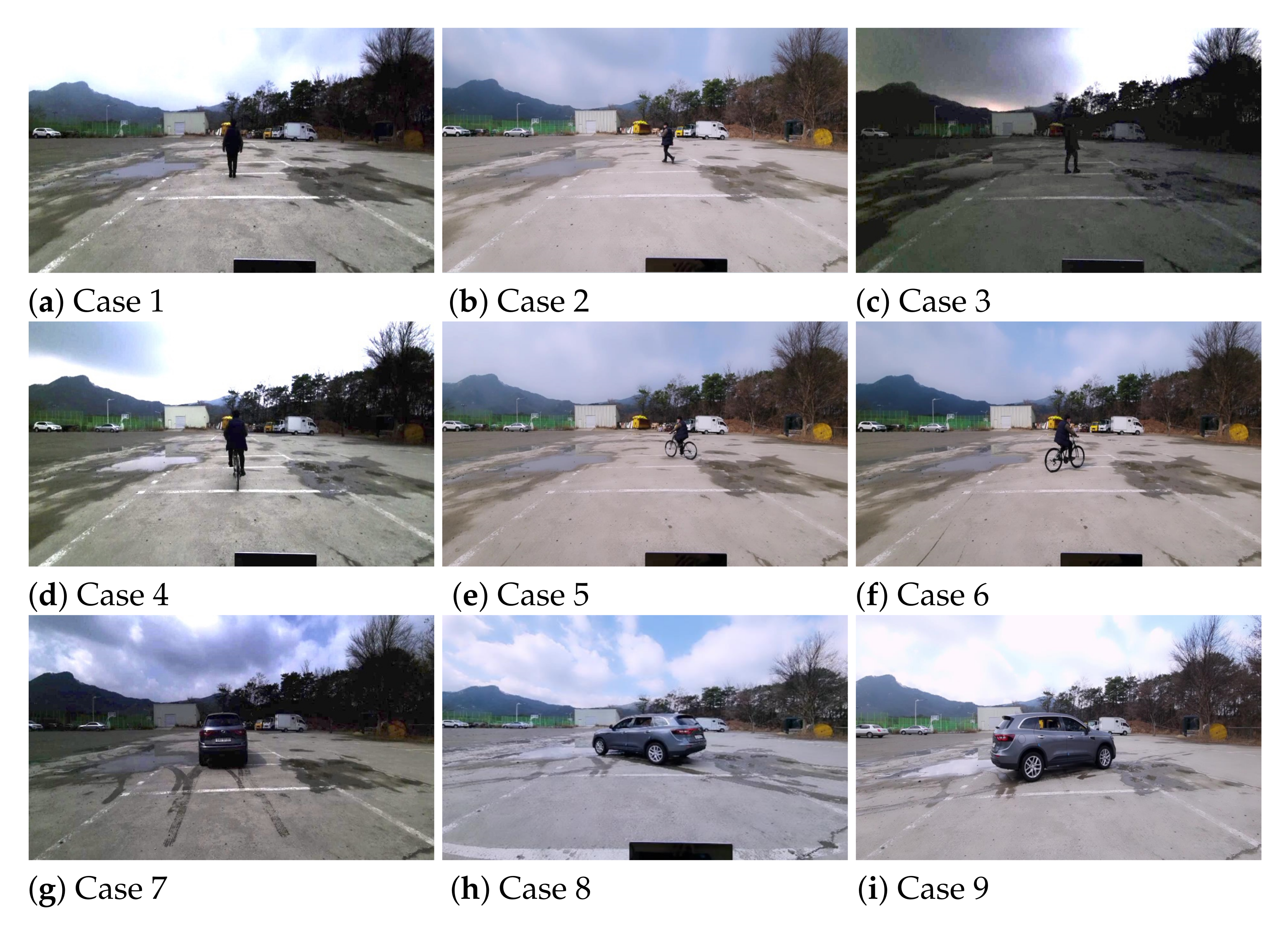
3.1. Measurement Environment
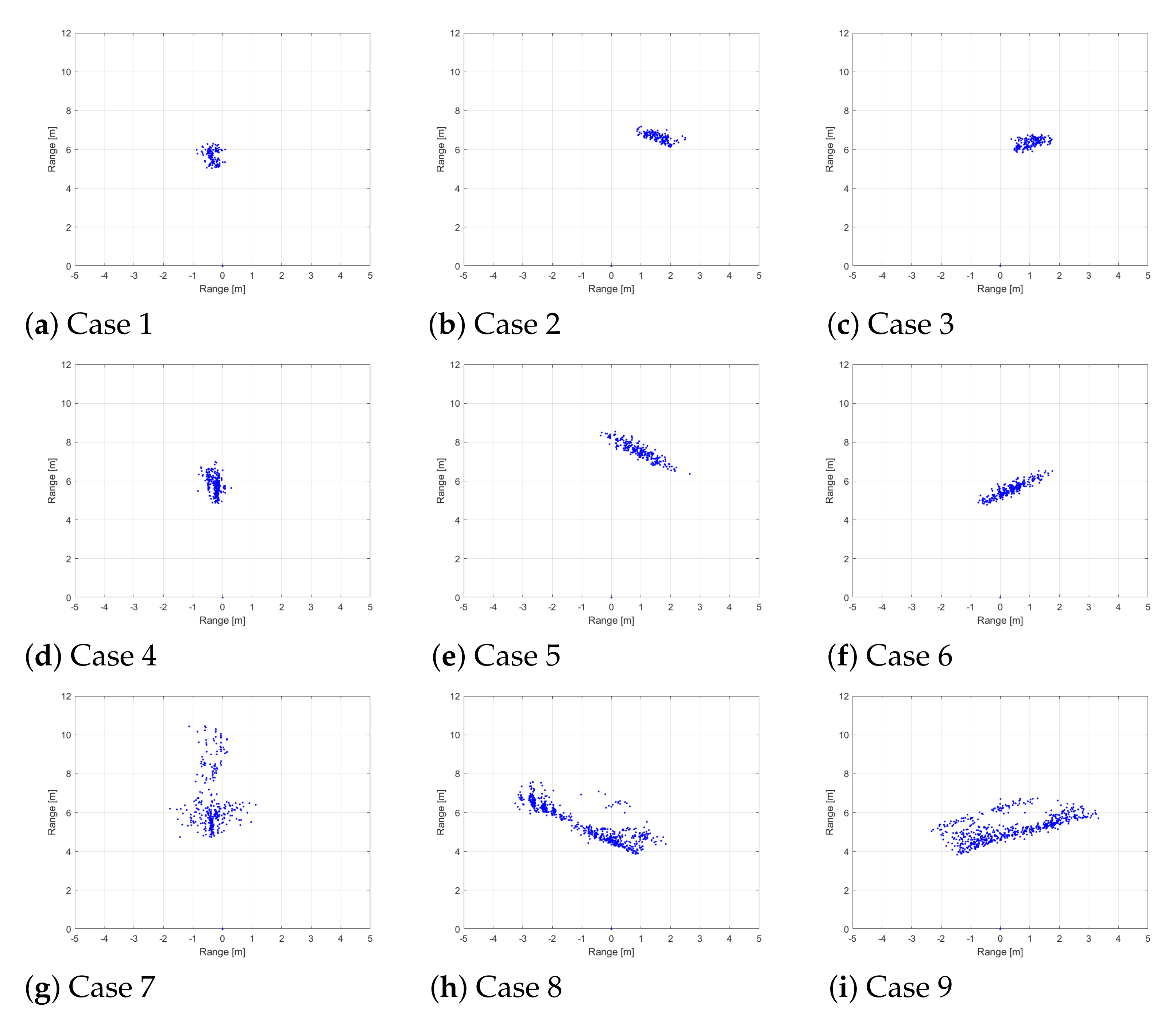
3.2. Radar Detection Result in 2D Distance Plane
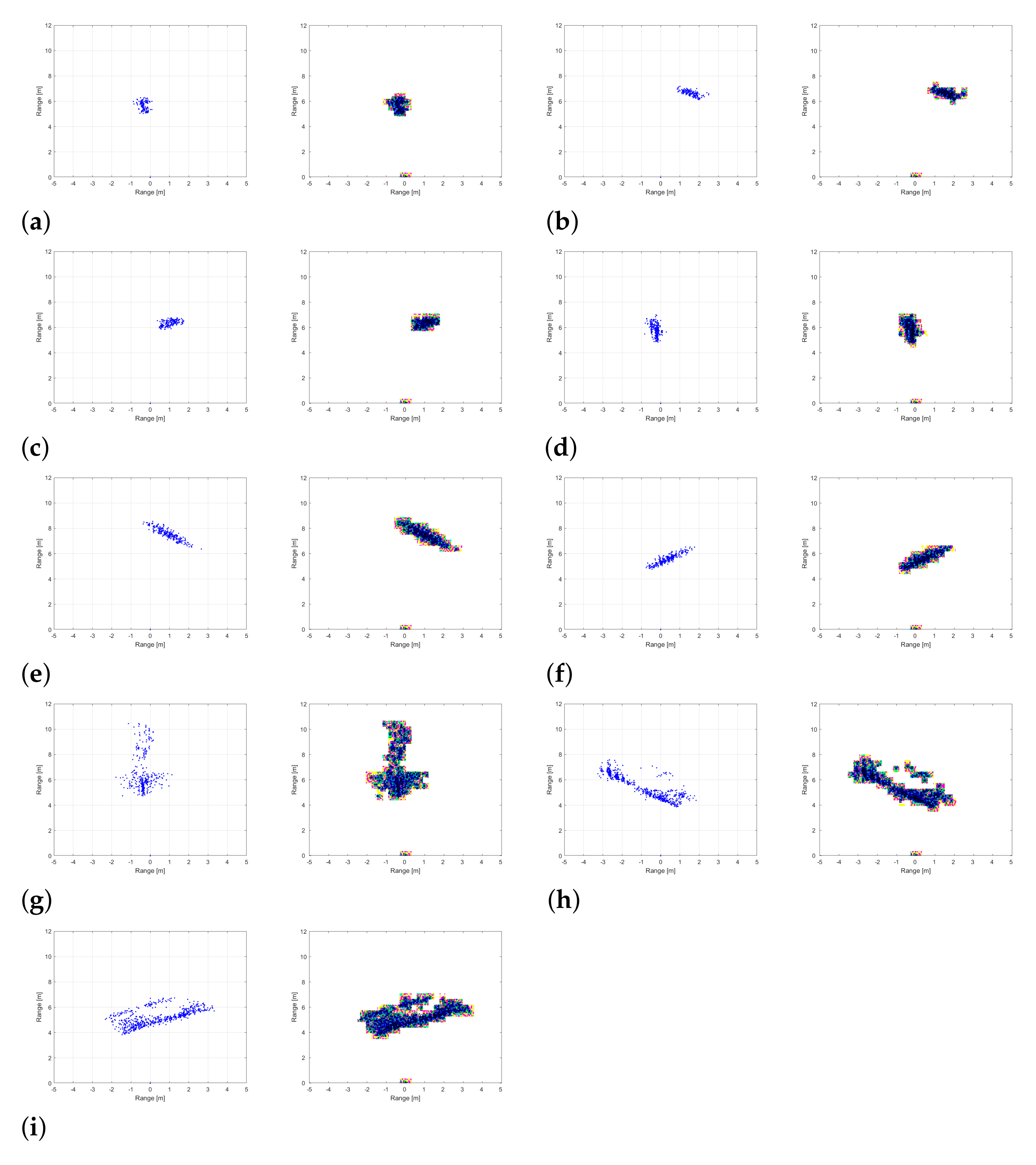
3.3. Target Image Generation
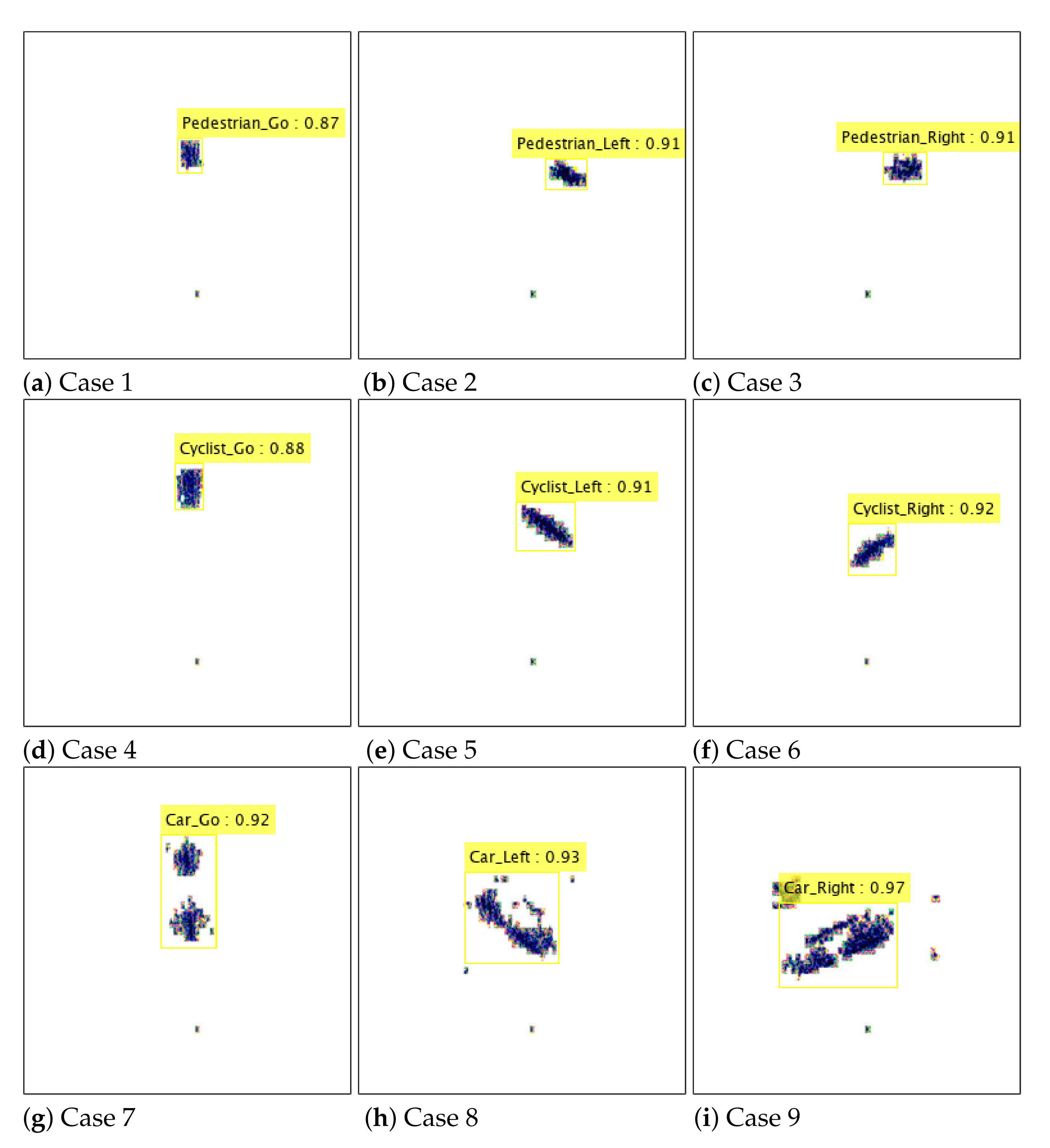
4. Proposed Simultaneous Target Classification and Moving Direction Estimation
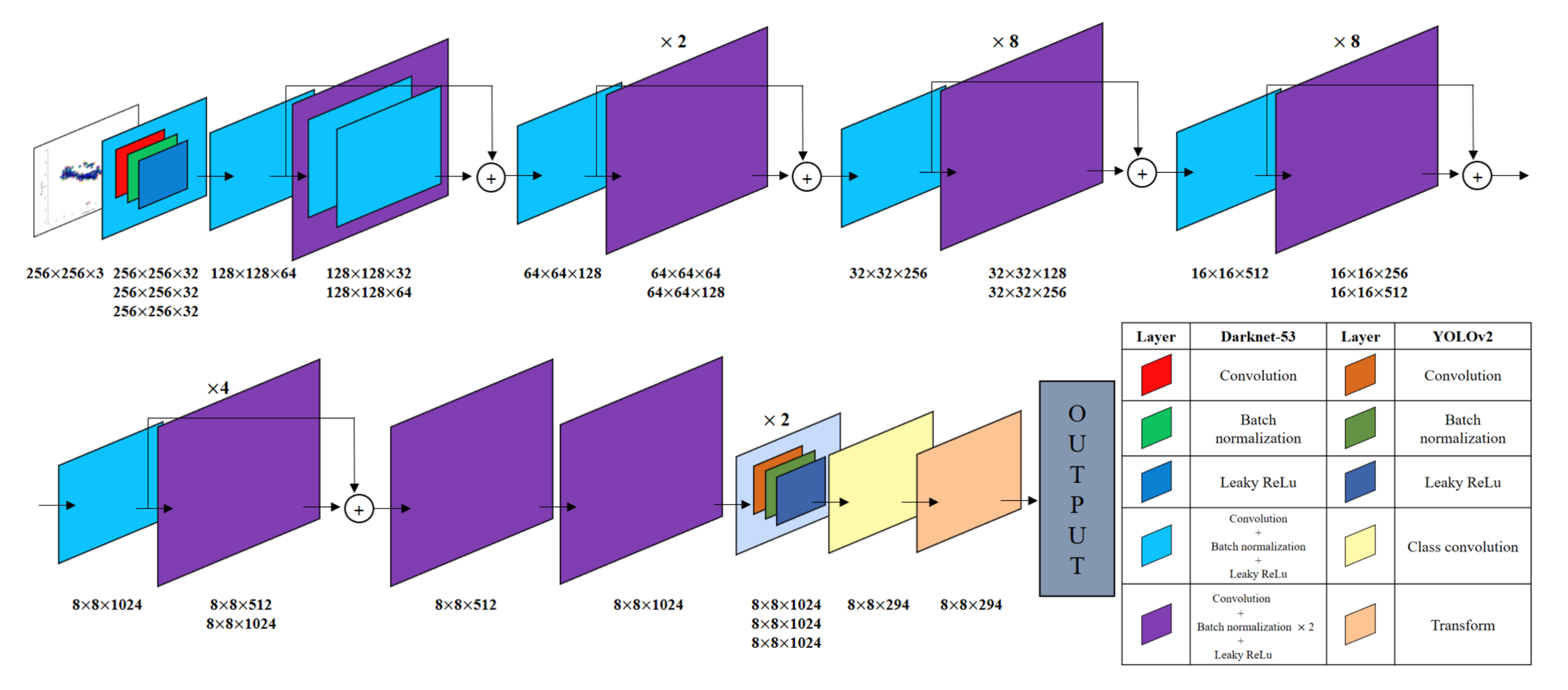
4.1. Structure of YOLO Network for Radar Target Identification
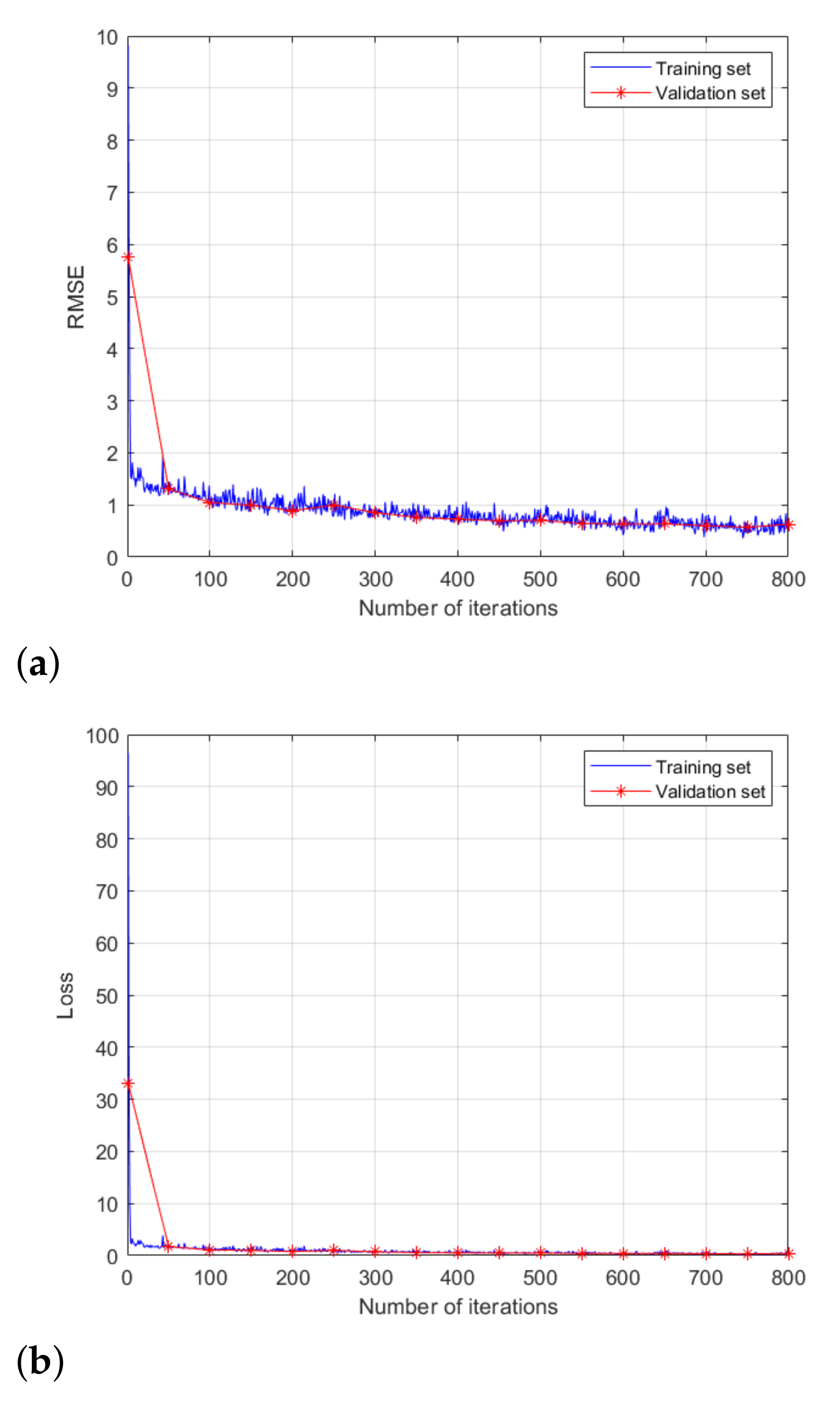
4.2. Performance Evaluation
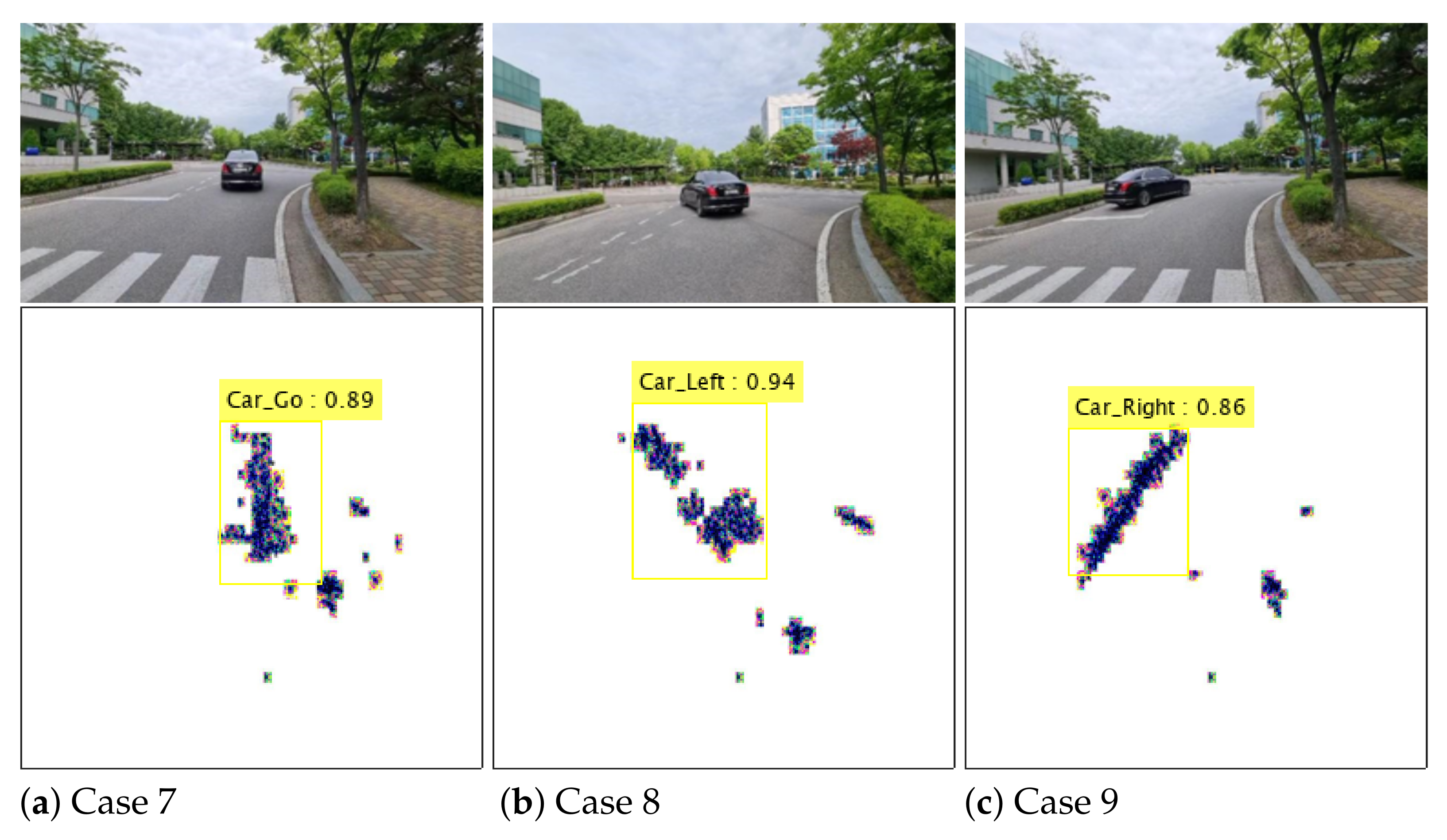
4.3. Performance Evaluation in New Environments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| 2D | Two-dimensional |
| CNN | Convolutional neural network |
| FMCW | Frequency-modulated continuous wave |
| IQ | In-phase and quadrature |
| JPEG | Joint photographic experts group |
| LPF | Low-pass filter |
| MIMO | Multiple-input and multiple-output |
| RGB | Red, green, and blue |
| RMSE | Root-mean-square error |
| YOLO | You only look once |
References
- Paula, M.B.D.; Jung, C.R. Automatic detection and classification of road lane markings using onboard vehicular cameras. IEEE Trans. Intell. Transp. Syst. 2015, 16, 3160–3169. [Google Scholar] [CrossRef]
- Leibe, B.; Schindler, K.; Cornelis, N.; Gool, L.V. Coupled object detection and tracking from static cameras and moving vehicles. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 1683–1698. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Ibanez-Guzman, J. Lidar for autonomous driving: The principles, challenges, and trends for automotive lidar and perception systems. IEEE Signal Process Mag. 2020, 37, 50–61. [Google Scholar] [CrossRef]
- Patole, S.M.; Torlak, M.; Wang, D.; Ali, M. Automotive radars: A review of signal processing techniques. IEEE Signal Process Mag. 2017, 34, 22–35. [Google Scholar] [CrossRef]
- Steinbaeck, J.; Steger, C.; Holweg, G.; Druml, N. Next generation radar sensors in automotive sensor fusion systems. In Proceedings of the 2017 Sensor Data Fusion: Trends, Solutions, Applications (SDF), Bonn, Germany, 10–12 October 2017; pp. 1–6. [Google Scholar]
- Sun, S.; Petropulu, A.P.; Poor, H.V. MIMO radar for advanced driver-assistance systems and autonomous driving: Advantages and challenges. IEEE Signal Process Mag. 2020, 37, 98–117. [Google Scholar] [CrossRef]
- Roos, F.; Bechter, J.; Knill, C.; Schweizer, B.; Waldschmidt, C. Radar sensors for autonomous driving: Modulation schemes and interference mitigation. IEEE Microw. Mag. 2019, 20, 58–72. [Google Scholar] [CrossRef] [Green Version]
- Major, B.; Fontijne, D.; Ansari, A.; Sukhavasi, R.T.; Gowaikar, R.; Hamilton, M.; Lee, S.; Grechnik, S.; Subramanian, S. Vehicle detection with automotive radar using deep learning on range-azimuth-Doppler tensors. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision Workshop (ICCVW), Seoul, Korea, 27 October–2 November 2019; pp. 924–932. [Google Scholar]
- Tilly, J.F.; Haag, S.; Schumann, O.; Weishaupt, F.; Duraisamy, B.; Dickmann, J.; Fritzsche, M. Detection and tracking on automotive radar data with deep learning. In Proceedings of the 2020 IEEE 23rd International Conference on Information Fusion (FUSION), Rustenburg, South Africa, 6–9 July 2020; pp. 1–7. [Google Scholar]
- Lim, S.; Jung, J.; Lee, B.-H.; Kim, S.-C.; Lee, S. CNN-based estimation of heading direction of vehicle using automotive radar sensor. IET Radar Sonar Navig. 2021, 15, 618–626. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. arXiv 2016, arXiv:1506.02640v5. [Google Scholar]
- Zhou, L.; Wei, S.; Cui, Z.; Ding, W. YOLO-RD: A lightweight object detection network for range doppler radar images. IOP Conf. Ser. Mater. Sci. Eng. 2019, 563, 1–6. [Google Scholar] [CrossRef]
- Pérez, R.; Schubert, F.; Rasshofer, R.; Biebl, E. Deep learning radar object detection and classification for urban automotive scenarios. In Proceedings of the 2019 Kleinheubach Conference, Miltenberg, Germany, 23–25 September 2019; pp. 1–4. [Google Scholar]
- Lee, S. Deep learning on radar centric 3D object detection. arXiv 2020, arXiv:2003.00851v1. [Google Scholar]
- Kim, W.; Cho, H.; Kim, J.; Kim, B.; Lee, S. YOLO-based simultaneous target detection and classification in automotive FMCW radar systems. Sensors 2020, 20, 2897. [Google Scholar] [CrossRef] [PubMed]
- Zhou, L.; Wei, S.; Cui, Z.; Fang, J.; Yang, X.; Ding, W. Lira-YOLO: A lightweight model for ship detection in radar images. J. Syst. Eng. Electron. 2020, 31, 950–956. [Google Scholar] [CrossRef]
- Li, S.; Gu, X.; Xu, X.; Xu, D.; Zhang, T.; Liu, Z.; Dong, Q. Detection of concealed cracks from ground penetrating radar images based on deep learning algorithm. Constr. Build. Mater. 2021, 273, 121949. [Google Scholar] [CrossRef]
- Mishra, K.V.; Bhavani Shankar, M.R.; Koivunen, V.; Ottersten, B.; Vorobyov, S.A. Toward millimeter-wave joint radar communications: A signal processing perspective. IEEE Signal Process Mag. 2019, 36, 100–114. [Google Scholar] [CrossRef] [Green Version]
- Liu, F.; Masouros, C.; Petropulu, A.P.; Griffiths, H.; Hanzo, L. Joint radar and communication design: Applications, state-of-the-art, and the road ahead. IEEE Trans. Commun. 2020, 68, 3834–3862. [Google Scholar] [CrossRef] [Green Version]
- Cohen, M.N. An overview of high range resolution radar techniques. In Proceedings of the NTC ‘91—National Telesystems Conference Proceedings, Atlanta, GA, USA, 26–27 March 1991; pp. 107–115. [Google Scholar]
- Winkler, V. Range Doppler detection for automotive FMCW radars. In Proceedings of the 2007 European Microwave Conference, Munich, Germany, 9–12 October 2007; pp. 1445–1448. [Google Scholar]
- Nickel, U. Array processing for radar: Achievements and challenges. Int. J. Antennas Propag. 2013, 2013, 1–21. [Google Scholar] [CrossRef]
- Krim, H.; Viberg, M. Two decades of array signal processing research: The parametric approach. IEEE Signal Process Mag. 1996, 13, 67–94. [Google Scholar] [CrossRef]
- Schmid, C.M.; Feger, R.; Scheiblhofer, S.; Stelzer, A. Measurement-based delay-and-sum signal processing for linear antenna arrays. In Proceedings of the 2010 IEEE International Conference on Wireless Information Technology and Systems, Honolulu, HI, USA, 28 August–3 September 2010; pp. 1–4. [Google Scholar]
- Lee, S.; Kwon, S.-Y.; Kim, B.-J.; Lim, H.-S.; Lee, J.-E. Dual-mode radar sensor for indoor environment mapping. Sensors 2021, 21, 2469. [Google Scholar] [CrossRef]
- Wallace, G.K. The JPEG still picture compression standard. IEEE Trans. Consum. Electron. 1992, 38, xviii–xxxiv. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. YOLOv3: An incremental improvement. arXiv 2018, arXiv:1804.02767v1. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLO9000: Better, faster, stronger. arXiv 2016, arXiv:1612.08242v1. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Detection Mode | |
|---|---|---|
| Short-Range Mode | Long-Range Mode | |
| Center frequency, (GHz) | 62 | |
| Bandwidth, (GHz) | 3 | 1.5 |
| Range resolution, (cm) | 5 | 10 |
| Transmit and receiving antenna elements | 1 × 4 | 2 × 4 |
| Sweep time, (s) | 150 | |
| The number of waveforms, and | 128 | |
| Signal processing cycle (ms) | 50 | |
| Case | Training (%) | Validation (%) | Test (%) | Total Number of Images |
|---|---|---|---|---|
| Case 1 | 70.8 | 10 | 19.2 | 250 |
| Case 2 | 74.5 | 7.7 | 17.8 | 220 |
| Case 3 | 71.6 | 9.8 | 18.6 | 225 |
| Case 4 | 71 | 13.4 | 15.6 | 500 |
| Case 5 | 71.4 | 9 | 19.6 | 500 |
| Case 6 | 67.4 | 9.6 | 23 | 500 |
| Case 7 | 71.2 | 10 | 18.8 | 309 |
| Case 8 | 68.2 | 7.8 | 24 | 462 |
| Case 9 | 67.1 | 11.6 | 21.3 | 371 |
| Parameter | Value |
|---|---|
| Batch size | 128 |
| Width | 256 (pixels) |
| Height | 256 (pixels) |
| Channels | 3 (R, G, B) |
| Learning rate | 0.001 |
| Momentum | 0.9 |
| Max epochs | 30 |
| Iterations | 4350 |
| Actual Case | Predicted Case (%) | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Case 1 | Case 2 | Case 3 | Case 4 | Case 5 | Case 6 | Case 7 | Case 8 | Case 9 | |
| Case 1 | 98.0 | 0 | 0 | 2 | 0 | 0 | 0 | 0 | 0 |
| Case 2 | 0 | 100.0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| Case 3 | 0 | 0 | 95.3 | 0 | 0 | 4.7 | 0 | 0 | 0 |
| Case 4 | 0 | 0 | 0 | 100.0 | 0 | 0 | 0 | 0 | 0 |
| Case 5 | 0 | 6.12 | 0 | 0 | 93.88 | 0 | 0 | 0 | 0 |
| Case 6 | 0 | 0 | 1.74 | 0 | 0 | 98.26 | 0 | 0 | 0 |
| Case 7 | 0 | 0 | 0 | 0 | 0 | 0 | 100.0 | 0 | 0 |
| Case 8 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 100.0 | 0 |
| Case 9 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 100.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.-C.; Jeong, H.-G.; Lee, S. Simultaneous Target Classification and Moving Direction Estimation in Millimeter-Wave Radar System. Sensors 2021, 21, 5228. https://doi.org/10.3390/s21155228
Kim J-C, Jeong H-G, Lee S. Simultaneous Target Classification and Moving Direction Estimation in Millimeter-Wave Radar System. Sensors. 2021; 21(15):5228. https://doi.org/10.3390/s21155228
Chicago/Turabian StyleKim, Jin-Cheol, Hwi-Gu Jeong, and Seongwook Lee. 2021. "Simultaneous Target Classification and Moving Direction Estimation in Millimeter-Wave Radar System" Sensors 21, no. 15: 5228. https://doi.org/10.3390/s21155228