Autonomous Navigation of a Team of Unmanned Surface Vehicles for Intercepting Intruders on a Region Boundary


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Work
3. Problem Statement
4. Main Techniques
4.1. Navigation Algorithm
4.2. Mathematical Analysis of the Navigation Algorithm
4.3. Comparison with the Static Barrier Coverage Approach
4.4. The Case of Several Intruders
5. Simulation and Discussion
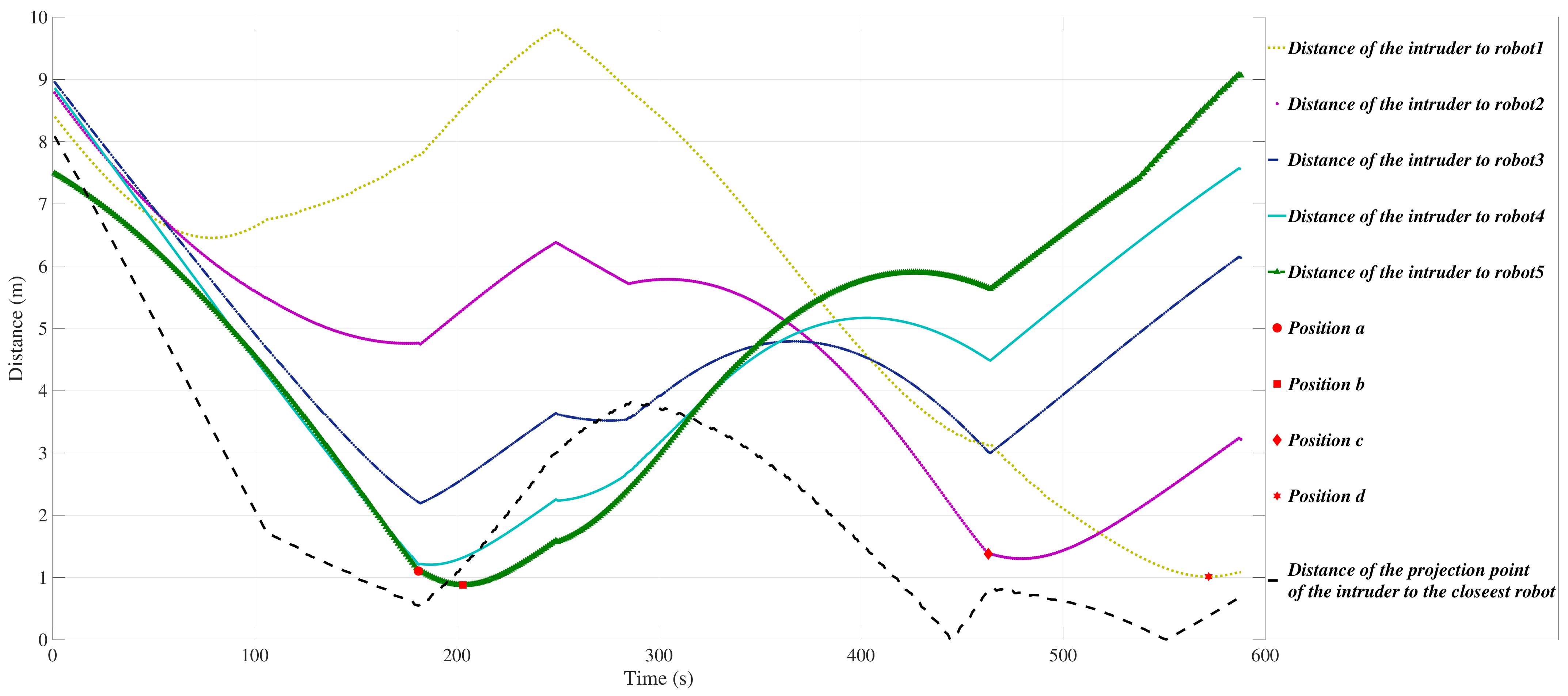
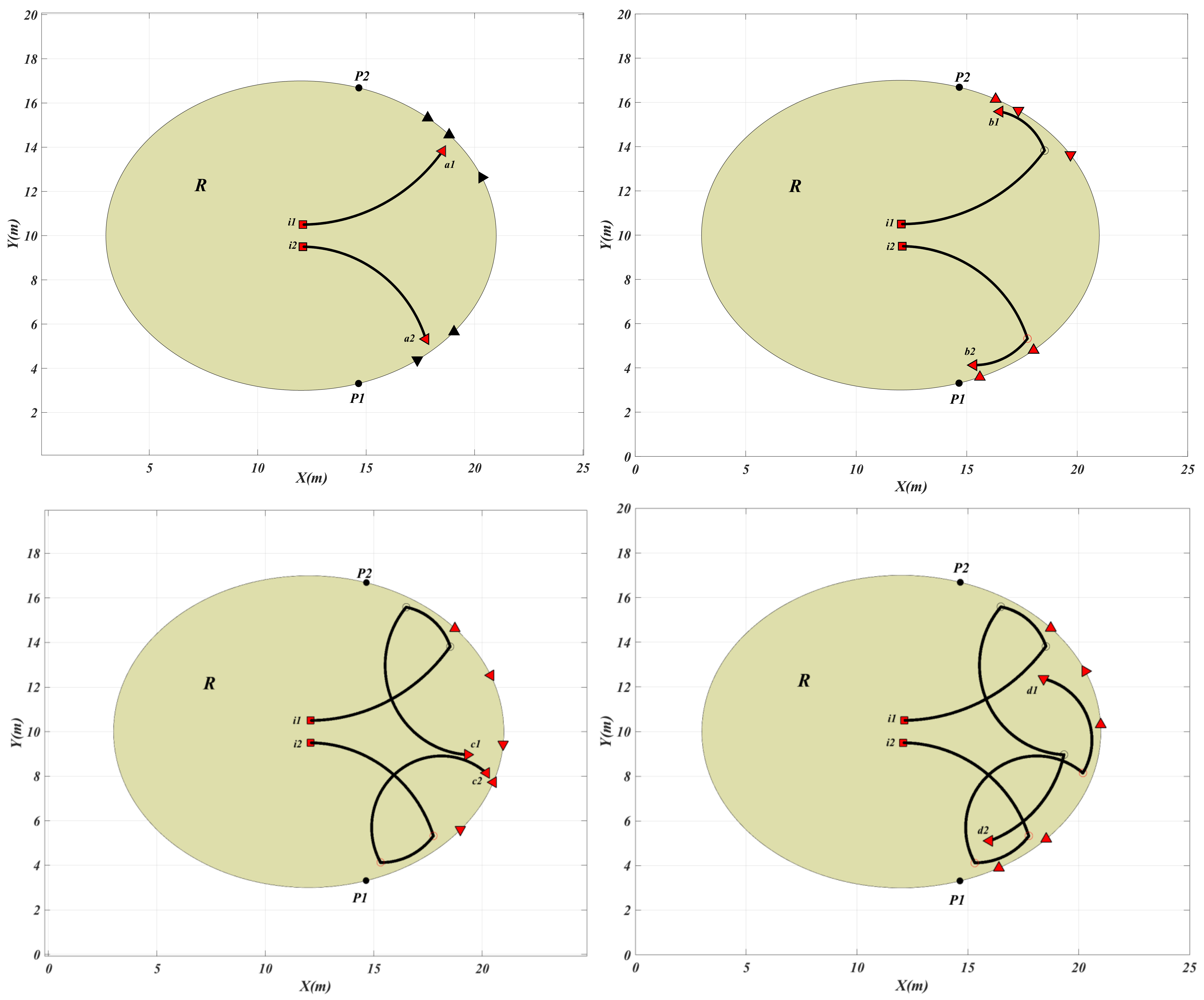
5.1. The Problem of Intercepting a Single Intruder
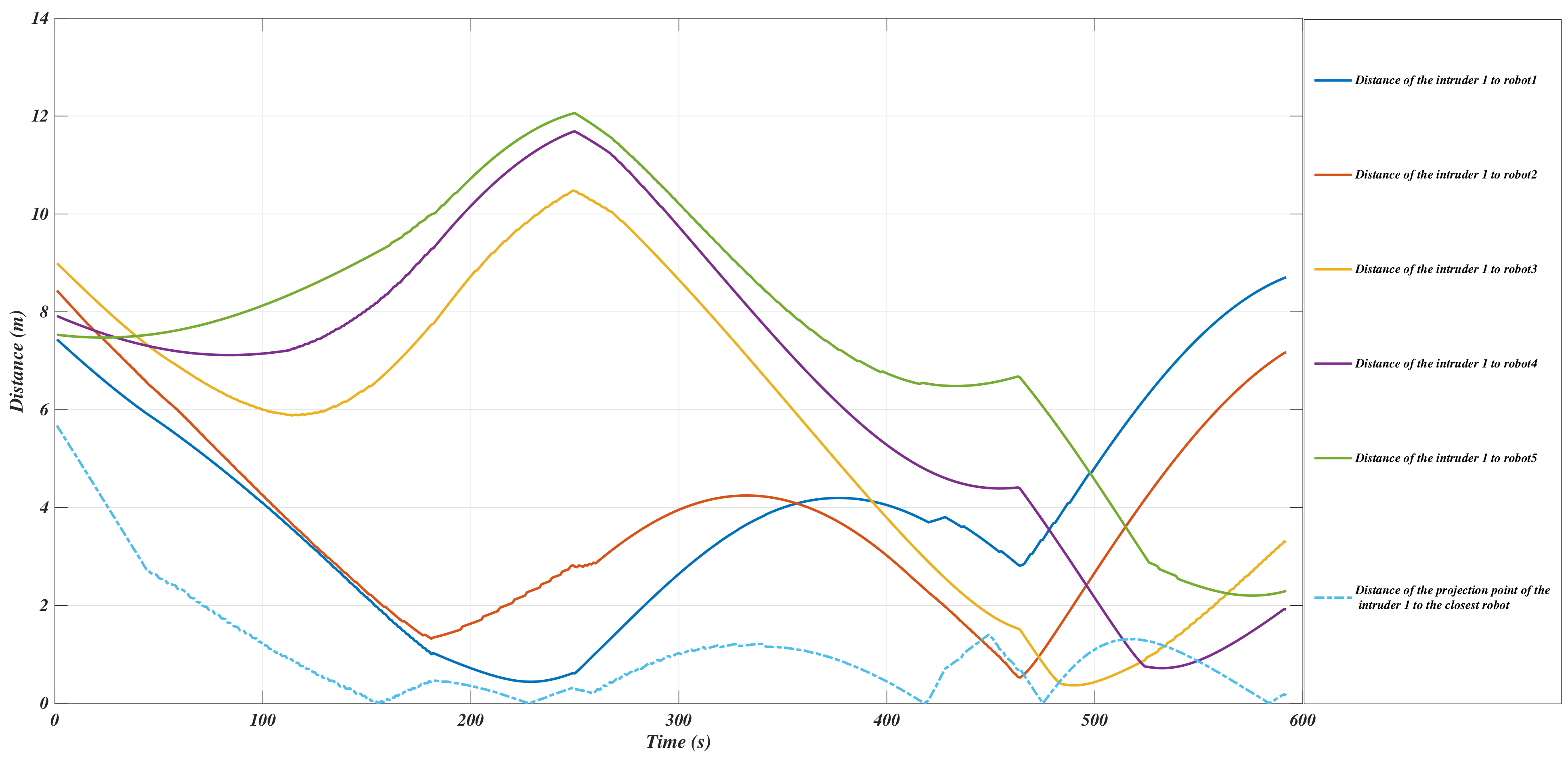
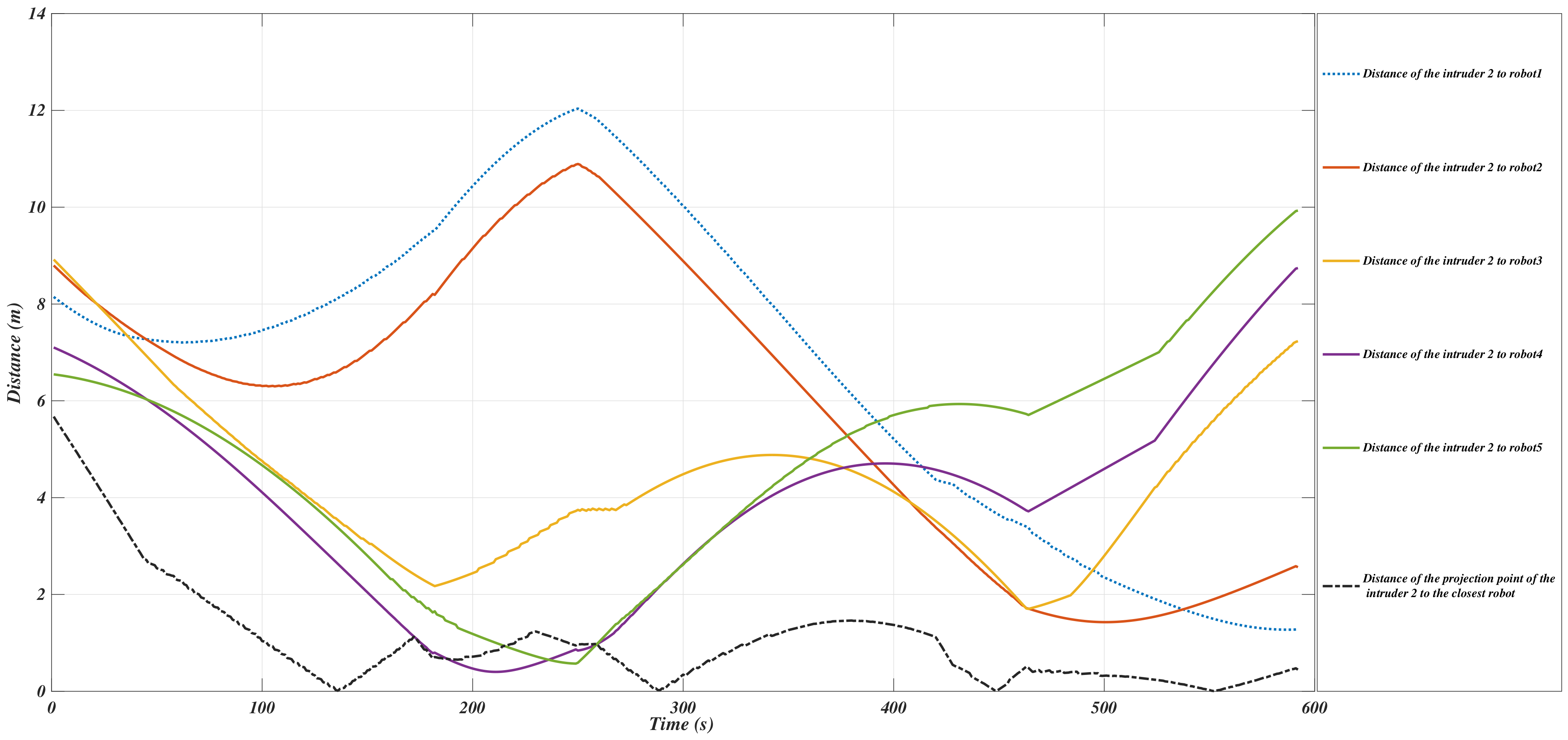
5.2. The Problem of Intercepting Multiple Intruders
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Matveev, A.S.; Teimoori, H.; Savkin, A.V. A method for guidance and control of an autonomous vehicle in problems of border patrolling and obstacle avoidance. Automatica 2011, 47, 515–524. [Google Scholar] [CrossRef]
- Matveev, A.S.; Wang, C.; Savkin, A.V. Real-Time Navigation of Mobile Robots in Problems of Border Patrolling and Avoiding Collisions with Moving and Deforming Obstacles. Rob. Auton. Syst. 2012, 60, 769–788. [Google Scholar] [CrossRef]
- Portugal, D.; Rocha, R.P. Distributed Multi-Robot Patrol: A Scalable and Fault-Tolerant Framework. Rob. Auton. Syst. 2013, 61, 1572–1587. [Google Scholar] [CrossRef]
- Marino, A.; Parker, L.E.; Antonelli, G.; Caccavale, F. A decentralized architecture for multi-robot systems based on the null-space-behavioral control with application to multi-robot border patrolling. J. Intell. Robot Syst. 2013, 71, 423–444. [Google Scholar] [CrossRef]
- Cheng, T.M.; Savkin, A.V. A distributed self-deployment algorithm for the coverage of mobile wireless sensor networks. IEEE Commun. Lett. 2009, 13, 877–879. [Google Scholar] [CrossRef]
- Savkin, A.V.; Cheng, T.M.; Xi, Z.; Javed, F.; Matveev, A.S.; Nguyen, H. Decentralized Coverage Control Problems for Mobile Robotic Sensor and Actuator Networks; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Cheng, T.M.; Savkin, A.V.; Javed, F. Decentralized control of a group of mobile robots for deployment in sweep coverage. Rob. Auton. Syst. 2011, 59, 497–507. [Google Scholar] [CrossRef]
- Cheng, T.M.; Savkin, A.V. Decentralized control for mobile robotic sensor network self-deployment: Barrier and sweep coverage problems. Robotica 2011, 29, 283–294. [Google Scholar] [CrossRef]
- Semakova, A.A.; Ovchinnikov, K.S.; Matveev, A.S. Self-deployment of mobile robotic networks: An algorithm for decentralized sweep boundary coverage. Robotica 2017, 35, 1816–1844. [Google Scholar] [CrossRef]
- Savkin, A.V.; Marzoughi, A. Distributed control of a robotic network for protection of a region from intruders. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China, 5–8 December 2017; pp. 804–808. [Google Scholar]
- Marzoughi, A. Maximizing the probability of intrusion detection by a fleet of mobile robots using an intelligent game theoretic approach. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 8342–8348. [Google Scholar]
- Polvara, R.; Sharma, S.; Wan, J.; Manning, A.; Sutton, R. Obstacle avoidance approaches for autonomous navigation of unmanned surface vehicles. J. Navig. 2018, 71, 241–256. [Google Scholar] [CrossRef] [Green Version]
- Xin, J.; Li, S.; Sheng, J.; Zhang, Y.; Cui, Y. Application of improved particle swarm optimization for navigation of unmanned surface vehicles. Sensors 2019, 19, 3096. [Google Scholar] [CrossRef] [Green Version]
- Mahacek, P.; Kitts, C.A.; Mas, I. Dynamic guarding of marine assets through cluster control of automated surface vessel fleets. IEEE ASME Trans. Mechatron. 2012, 17, 65–75. [Google Scholar] [CrossRef]
- Raboin, E.; Svec, P.; Nau, D.; Gupta, S.K. Model-predictive target defense by team of unmanned surface vehicles operating in uncertain environments. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 17 October 2013; pp. 3517–3522. [Google Scholar]
- Raboin, E.; Svec, P.; Nau, D.S.; Gupta, S.K. Model-predictive asset guarding by team of autonomous surface vehicles in environment with civilian boats. Auton. Robot. 2015, 38, 261–282. [Google Scholar] [CrossRef]
- Simetti, E.; Turetta, A.; Casalino, G.; Storti, E.; Cresta, M. Protecting assets within a civilian harbour through the use of a team of USVs: Interception of possible menaces. In IARP Workshop on Robots for Risky Interventions and Environmental Surveillance-Maintenance (RISE-10); Sheffield Hallam University: Sheffield, UK, 2010. [Google Scholar]
- Li, X.; Huang, H.; Savkin, A.V. A Novel Method for Protecting Swimmers and Surfers from Shark Attacks using Communicating Autonomous Drones. IEEE Internet Things J. 2020, 7, 9884–9894. [Google Scholar] [CrossRef]
- Gage, D.W. Command control for many-robot systems. In Proceedings of the 19th Annual AUVS Technical Symposium, Hunstville, AL, USA, 22–24 April 1992. [Google Scholar]
- Sharma, V.; Patel, R.B.; Bhadauria, H.S.; Prasad, D. Deployment schemes in wireless sensor network to achieve blanket coverage in large-scale open area: A review. Egypt. Inform. J. 2016, 17, 45–56. [Google Scholar] [CrossRef] [Green Version]
- Huang, H.; Savkin, A.V.; Li, X. Reactive Autonomous Navigation of UAVs for Dynamic Sensing Coverage of Mobile Ground Targets. Sensors 2020, 20, 3720. [Google Scholar] [CrossRef]
- Isaacs, R. Differential Games. A Mathematical Theory with Applications to Warfare and Pursuit, Control and Optimization; Courier Corporation: New York, NY, USA, 1999. [Google Scholar]
- Yan, R.; Shi, Z.; Zhong, Y. Reach-Avoid Games With Two Defenders and One Attacker: An Analytical Approach. IEEE Trans. Cybern. 2018, 99, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Chen, M.; Zhou, Z.; Tomlin, C.J. Multiplayer reach-avoid games via low dimensional solutions and maximum matching. In Proceedings of the American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 1444–1449. [Google Scholar]
- Shishika, D.; Kumar, V. Local-game decomposition for multiplayer perimeter-defense problem. In Proceedings of the IEEE Conference on Decision and Control, Miami Beach, FL, USA, 17–19 December 2018; pp. 2093–2100. [Google Scholar]
- Savkin, A.V.; Huang, H. Navigation of a Network of Aerial Drones for Monitoring a Frontier of a Moving Environmental Disaster Area. IEEE Syst. J. 2020, 14, 4746–4749. [Google Scholar] [CrossRef]
- Cruz, H.; Eckert, M.; Meneses, J.; Martínez, J.-F. Efficient forest fire detection index for application in unmanned aerial systems (UASs). Sensors 2016, 16, 893. [Google Scholar] [CrossRef] [Green Version]
- Odonkor, P.; Ball, Z.; Chowdhury, S. Distributed operation of collaborating unmanned aerial vehicles for time-sensitive oil spill mapping. Swarm Evol. Comput. 2019, 46, 52–68. [Google Scholar] [CrossRef]
- Jorge, V.A.; Granada, R.; Maidana, R.G.; Jurak, D.A.; Heck, G.; Negreiros, A.P.; dos Santos, D.H.; Gonçalves, L.M.; Amory, A.M. A survey on unmanned surface vehicles for disaster robotics: Main challenges and directions. Sensors 2019, 19, 702. [Google Scholar] [CrossRef] [Green Version]
- Kum, B.C.; Shin, D.H.; Lee, J.H.; Moh, T.; Jang, S.; Lee, S.Y.; Cho, J.H. Monitoring applications for multifunctional unmanned surface vehicles in marine coastal environments. J. Coast Res. 2018, 85, 1381–1385. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, Y.; Yu, X.; Yuan, C. Unmanned surface vehicles: An overview of developments and challenges. Annu. Rev. Control. 2016, 41, 71–93. [Google Scholar] [CrossRef]
- Singh, Y.; Sharma, S.; Sutton, R.; Hatton, D. Towards use of Dijkstra Algorithm for Optimal Navigation of an Unmanned Surface Vehicle in a Real-Time Marine Environment with results from Artificial Potential Field. TransNav 2018, 12, 125–131. [Google Scholar] [CrossRef]
- Campbell, S.; Naeem, W.; Irwin, G.W. A review on improving the autonomy of unmanned surface vehicles through intelligent collision avoidance manoeuvres. Annu. Rev. Control 2012, 36, 267–283. [Google Scholar] [CrossRef] [Green Version]
- Savkin, A.V.; Huang, H. Asymptotically optimal deployment of drones for surveillance and monitoring. Sensors 2019, 19, 2068. [Google Scholar] [CrossRef] [Green Version]
- Cheng, F.; Yu, W.; Wan, Y.; Cao, J. Distributed robust control for linear multiagent systems with intermittent communications and parameter uncertainties. IEEE Trans. Circuits Syst. II Express Briefs 2016, 63, 838–842. [Google Scholar] [CrossRef]
- Hong, H.; Yu, W.; Yu, X.; Wen, G.; Alsaedi, A. Fixed-time connectivity-preserving distributed average tracking for multiagent systems. IEEE Trans. Circuits Syst. II Express Briefs 2017, 64, 1192–1196. [Google Scholar] [CrossRef]
- Skafidas, E.; Evans, R.J.; Savkin, A.V.; Petersen, I.R. Stability results for switched controller systems. Automatica 1999, 35, 553–564. [Google Scholar] [CrossRef]
- Utkin, V.I. Sliding Modes in Control and Optimization; Springer: London, UK, 2013. [Google Scholar]
- Savkin, A.V.; Evans, R.J. Hybrid Dynamical Systems. Controller and Sensor Switching Problems; Birkhauser: Boston, MA, USA, 2002. [Google Scholar]
- Petersen, I.R.; Ugrinovskii, V.A.; Savkin, A.V. Robust Control Design Using H-Infinity Methods; Springer: London, UK, 2000. [Google Scholar]
- Savkin, A.V.; Wang, C. A Simple Biologically-Inspired Algorithm for Collision Free Navigation of a Unicycle-like Robot in Dynamic Environments with Moving Obstacles. Robotica 2013, 31, 993–1001. [Google Scholar] [CrossRef]
- Matveev, A.S.; Savkin, A.V.; Hoy, M.; Wang, C. Safe Robot Navigation among Moving and Steady Obstacles; Elsevier: Cambridge, MA, USA, 2015. [Google Scholar]
- Hoy, M.; Matveev, A.S.; Savkin, A.V. Algorithms for Collision Free Navigation of Mobile Robots in Complex Cluttered Environments: A Survey. Robotica 2015, 33, 463–497. [Google Scholar] [CrossRef] [Green Version]
- Marzoughi, A. Decentralised Navigation Control of a Multi-Robot Team to Minimising Energy Consumption in an Unknown Obstacle-Ridden Area. In Proceedings of the 2018 37th Chinese Control Conference (CCC), Wuhan, China, 8 October 2018; pp. 4922–4927. [Google Scholar]
- Marzoughi, A. Switching Navigation for a Fleet of Mobile Robots in Multi-Obstacle Regions. Int. J. Mech. Eng. Robot. Res. 2019, 8, 1–5. [Google Scholar] [CrossRef]
- Marzoughi, A. Navigating a mobile robot to avoid moving obstacles using virtual source/sink force field. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China, 5–8 December 2017; pp. 344–349. [Google Scholar]
- Marzoughi, A. A decentralized position estimation switching algorithm to avoid a convex obstacle. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 11 September 2017; pp. 603–6036. [Google Scholar]
- Ganganath, N.; Yuan, W.; Fernando, T.; Iu, H.H.C.; Cheng, C.-T. Energy-efficient anti-flocking control for mobile sensor networks on uneven terrains. IEEE Trans. Circuits Syst. II Express Briefs 2018, 65, 2022–2026. [Google Scholar] [CrossRef]
- Savkin, A.V.; Huang, H. Proactive deployment of aerial drones for coverage over very uneven terrains: A version of the 3D art gallery problem. Sensors 2019, 19, 1438. [Google Scholar] [CrossRef] [PubMed] [Green Version]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marzoughi, A.; Savkin, A.V. Autonomous Navigation of a Team of Unmanned Surface Vehicles for Intercepting Intruders on a Region Boundary. Sensors 2021, 21, 297. https://doi.org/10.3390/s21010297
Marzoughi A, Savkin AV. Autonomous Navigation of a Team of Unmanned Surface Vehicles for Intercepting Intruders on a Region Boundary. Sensors. 2021; 21(1):297. https://doi.org/10.3390/s21010297
Chicago/Turabian StyleMarzoughi, Ali, and Andrey V. Savkin. 2021. "Autonomous Navigation of a Team of Unmanned Surface Vehicles for Intercepting Intruders on a Region Boundary" Sensors 21, no. 1: 297. https://doi.org/10.3390/s21010297