1. Introduction
The trend of moving computation towards the edge is becoming ever more relevant, leading to performance improvements and the development of new field data processing applications [
1]. This computation shift from the cloud (e.g., [
2]) to the edge has advantages in terms of response latency, bandwidth occupancy, energy consumption, security and expected privacy (e.g., [
3]). The huge amount, relevance and overall sensitivity of the data now collected also raise clear concerns about their use, as is being increasingly acknowledged (e.g., [
4]), meaning that this is a key issue to be addressed at the societal level.
The trend towards edge computing also concerns machine learning (ML) techniques, particularly for the inference task, which is much less computationally intensive than the previous training phase. ML systems “learn” to perform tasks by considering examples, in the training phase, generally without being programmed with task-specific rules. When running ML-trained models, Internet of Things (IoT) devices can locally process their collected data, providing a prompter response and filtering the amount of bits exchanged with the cloud.
ML on the edge has attracted the interest of industry giants. Google has recently released the TensorFlow Lite platform, which provides a set of tools that enable the user to convert TensorFlow Neural Network (NN) models into a simplified and reduced version, then run this version on edge devices [
5,
6]. EdgeML is a Microsoft suite of ML algorithms designed to work off the grid in severely resource-constrained scenarios [
7]. ARM has published an open-source library, namely Cortex Microcontroller Software Interface Standard Neural Network (CMSIS-NN), for Cortex-M processors, which maximizes NN performance [
8]. Likewise, a new package, namely X-Cube-AI, has been released for implementing deep learning models on STM 32-bit microcontrollers [
9].
While the literature is increasingly reporting on novel or adapted embedded machine learning algorithms, architectures and applications, there is a lack of quantitative analyses about the performance of common ML algorithms on state-of-the-art mainstream edge devices, such as ARM microcontrollers [
10]. We argue that this has limited the development of new applications and the upgrading of existing ones through an edge computing extension.
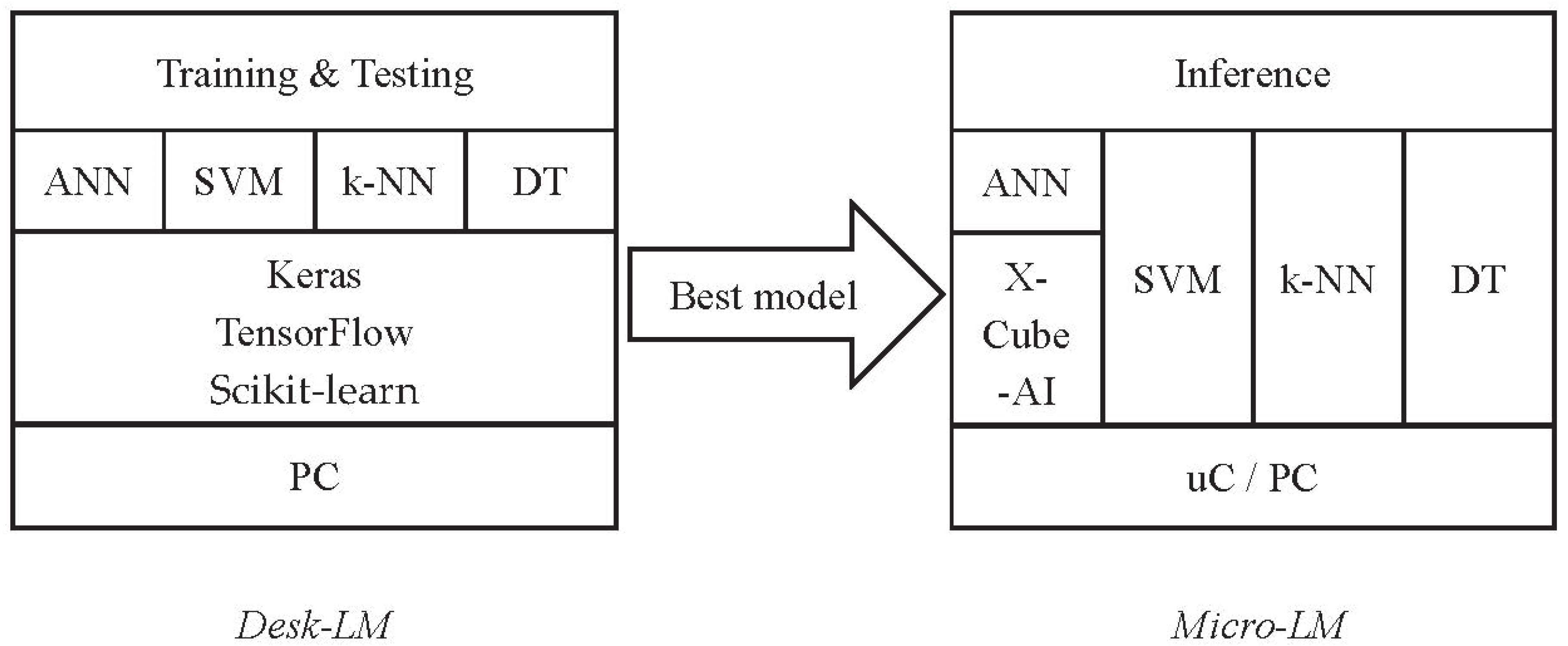
In this context, we have developed the Edge Learning Machine (ELM), a framework that performs ML inference on edge devices using models created, trained, and optimized on a Desktop environment. The framework provides a platform-independent C language implementation of well-established ML algorithms, such as linear Support Vector Machine (SVM), k-Nearest Neighbors (k-NN) and Decision Tree. It also supports artificial neural networks by exploiting the X-Cube-AI package for STM 32 devices [
9]. We validated the framework on a set of STM microcontrollers (families F0, F3, F4, F7, H7, and L4) using six different datasets, to answer a set of ten research questions exploring the performance of microcontrollers in typical ML Internet of Things (IoT) applications. The research questions concern a variety of aspects, ranging from inference performance comparisons (also with respect to a desktop implementation) to training time, and from pre-processing to hyperparameter tuning. The framework is released on an open-source basis (
https://github.com/Edge-Learning-Machine), with a goal to support researchers in designing and deploying ML solutions on edge devices.
The remainder of this paper is organized as follows:
Section 2 provides background information about the ML techniques that are discussed in the manuscript.
Section 3 describes the related work in this field.
Section 4 shows the implemented framework and the supported algorithms.
Section 5 presents the extensive experimental analysis we conducted by exploiting the framework. Finally,
Section 6 draws conclusions and briefly illustrates possible future research directions.
3. Related Work
A growing number of articles are being published on the implementation of ML on embedded systems, especially with a focus on the methodology of moving computation towards the edge. Zhang et al. [
16] presented an object detector, namely MobileNet-Single Shot Detector (SSD), which was trained using a deep convolutional neural network with the popular Caffe framework. The pre-trained model was then deployed on NanoPi2, an ARM board developed by FriendlyARM, which uses Samsung Cortex-A9 Quad-Core S5P4418@1.4GHz SoC and 1 GB 32bit DDR3 RAM. MobileNet-SSD can run at 1.13FPS.
Yazici et al. [
17] tested the ability of a Raspberry Pi to run ML algorithms. Three algorithms were tested, Support Vector Machine (SVM), Multi-Layer Perceptron, and Random Forests, with an accuracy above 80% and a low energy consumption. Fraunhofer Institute for Microelectronic Circuits and Systems have developed Artificial Intelligence for Embedded Systems (AIfES), a library that can run on 8-bit microcontrollers and recognize handwriting and gestures without requiring a connection to the cloud or servers [
18]. Cerutti et al. [
19] implemented a convolutional neural network on STM Nucleo-L476RG for people detection using CMSIS-NN, which is an optimized library that allows for the deployment of NNs on Cortex-M microcontrollers. In order to reduce the model size, weights are quantized to an 8-bit fixed point format, which slightly affects the performance. The network fits in 20 KB of flash and 6 KB of RAM with 77% accuracy.
Google has recently released Coral Dev Board, which includes a small low power Application-Specific Integrated Circuit (ASIC) called Edge TPU, and provides high-performance ML inferencing without running the ML model on any kind of server. Edge TPU can run TensorFlow Lite, with a low processing power and high performance [
20]. There are a few application programming interfaces (APIs) in the Edge tencor processing unit (TPU) module that perform inference (ClassificationEngine) for image classification, for object detection (DetectionEngine) and others that perform on-device transfer learning [
21].
Microsoft is developing EdgeML, a library of machine learning algorithms that are trained on the cloud/desktop and can run on severely resource-constrained edge and endpoint IoT devices (also with 2 KB RAM), ranging from the Arduino to the Raspberry Pi [
7]. They are currently releasing tree- and k-NN-based algorithms, called Bonsai and ProtoNN, respectively, for classification, regression, ranking and other common IoT tasks. Their work also concerns recurrent neural networks [
22]. A major achievement concerns the translation of floating-point ML models into fixed-point code [
23], which is, however, not the case in state-of-the-art mainstream microcontrollers.
The Amazon Web Services (AWS) IoT Greengrass [
24] supports machine learning inference locally on edge devices. The user could use his own pre-trained model or use models that are created, trained, and optimized in Amazon SageMaker (cloud), where massive computing resources are available. AWS IoT Greengrass features lambda runtime, a message manager, resource access, etc. The minimum hardware requirements are 1 GHz of computing speed and 128 MB of RAM.
Ghosh et al. [
25] used autoencoders at the edge layer that are capable of dimensionality reduction to reduce the required processing time and storage space. The paper illustrates three scenarios. In the first one, data from sensors are sent to edge nodes, where data reduction is performed, and machine learning is then carried out in the cloud. In the second scenario, encoded data at the edge are decoded in the cloud to obtain the original amount of data and then perform machine learning tasks. Finally, pure cloud computing is performed, where data are sent from the sensors to the cloud. Results show that an autoencoder at the edge reduces the number of features and thus lowers the amount of data sent to the cloud.
Amiko’s Respiro is a smart inhaler sensor featuring an ultra-low-power ARM Cortex-M processor [
26]. This sensor uses machine learning to interpret vibration data from an inhaler. The processor allows for the running of ML algorithms where the sensor is trained to recognize breathing patterns and calculate important parameters. The collected data are processed in an application and feedback is provided.
Magno et al. [
27] presented an open-source toolkit, namely FANNCortexM. It is built upon the Fast Artificial Neural Network (FANN) library and can run neural networks on the ARM Cortex-M series. This toolkit takes a neural network trained with FANN and generates code suitable for low-power microcontrollers. Another paper by Magno et al. [
28] introduces a wearable multi-sensor bracelet for emotion detection that is able to run multilayer neural networks. In order to create, train, and test the neural network, the FANN library is used. To deploy the NN on the Cortex-M4F microcontroller, the above-mentioned library needs to be optimized using CMSIS and TI-Driverlib libraries.
FidoProject is a C++ machine learning library for embedded devices and robotics [
29]. It implements a neural network for classification and other algorithms such as Reinforcement Learning. Alameh et al. [
30] created a smart tactile sensing system by implementing a convolutional neural network on various hardware platforms like Raspberry Pi 4, NVidia Jetson TX2, and Movidius NCS2 for tactile data decoding.
As recent works used knowledge transfer (KT) techniques to transfer information from a large neural network to a small one in order to improve the performance of the latter, Sharma et al. [
31] investigated the application of KT to edge devices, achieving good results by transferring knowledge from both the intermediate layers and the last layer of the teacher (original model) to a shallower student (target).
While most of the listed works use powerful edge devices (e.g., Cortex-A9, Raspberry PI) to test algorithms, especially NNs, there is a lack of performance analysis of common ML algorithms on mainstream microcontrollers. We intend to plug this gap by providing an open-source framework that we used for an extensive analysis.
5. Experimental Analysis and Result
We conducted the experimental analysis using six ARM Cortex-M microcontrollers produced by STM, namely F091RC, F303RE, F401RE, F746ZG, H743ZI2, and L452RE. The F series represents a wide range of microcontroller families in terms of execution time, memory size, data processing and transfer capabilities [
39], while the H series provides higher performance, security, and multimedia capabilities [
40]. L microcontrollers are ultra-low-power devices used in energy-efficient embedded systems and applications [
41]. All listed MCUs have been used in our experiments with their STM32CubeIDE default clock values, that could be increased for a faster response.
Table 3 synthesizes the main features of these devices. In the analysis, we compare the performance of the embedded devices with that of a desktop PC hosting a 2.70 GHz Core i7 processor, with 16 GB RAM and 8 MB cache.
In order to characterize the performance of the selected edge devices, we have chosen six benchmark datasets to be representative of IoT applications (
Table 4). These datasets represent different application scenarios: binary classification, multiclass classification, and regression. University of California Irvine (UCI) heart disease is a popular medical dataset [
42]. Virus is a dataset developed by the University of Genova to deal with data traffic analysis [
43,
44,
45]. Sonar represents the readings of a sonar system that analyses materials, distinguishing between rocks and metallic material [
46,
47]. Peugeot 207 contains various parameters collected from cars, which are used to predict either the road surface or the traffic (two labels were considered in our studies: label_14: road surface and label_15: traffic) [
48]. The EnviroCar dataset records various vehicular signals through the onboard diagnostic (OBDII) interface to the Controller Area Network (CAN) bus [
49,
50,
51]. The air quality index (AQI) dataset measures air quality in Australia during a period of one year [
52]. Before processing, all data were converted to float32, according to the target execution platform.
Our analysis was driven by a set of questions, synthesized in
Table 5, aimed at investigating the performance of different microcontrollers in typical ML IoT contexts. We are also interested in comparing the inference performance of microcontrollers vs. desktops. The remainder of this section is devoted to the analysis of each research question. In a few cases, when the comparison is important, results are reported for every tested target platform. On the other hand, in most of the cases, when not differently stated, we chose the F401RE device as the reference for the embedded targets.
5.1. Performance
The first research question concerns the performance achieved both on desktop and on edge. For SVM, k-NN and DT on desktops, we report the performance of both our C implementation and the python scikit-learn implementation, while for ANN we have only the TensorFlow Keras implementation. The following set of tables show, for each algorithm, the obtained score, which is expressed in terms of accuracy (in percent, for classification problems), or coefficient of determination, R-Squared (R2, for regression problems). R2 is the proportion of the variance in the dependent variable that is predictable from the independent variable(s). The best possible score for R2 is 1.0. In scikit-learn, R2 can assume negative values, because the model can be arbitrarily worse. The second performance we consider is the inference time.
Remarkably, all the embedded platforms were able to achieve the same score (accuracy or R2) as the desktop python implementation. None of the chosen datasets required the compression of the models by the STM X-Cube-AI package. ANN performed well in general, except for the Heart and Virus datasets, where the accuracy is under 90%. The inference time is relatively low in both desktop and MCUs (with similar values, in the order of ms and sometimes less). However, there is an exception in some cases—especially for Peugeot_Target_15 and Sonar—when using the F3 microcontroller.
- 2.
Linear SVM:
As with ANN, for the linear SVM, we obtained the same score across all the target platforms, and relatively short inference times (again, with almost no difference between desktop and microcontroller implementations). However, we obtained significantly worse results than ANN for more than half of the investigated datasets.
Table 9 stresses the importance of tuning the C regularization parameter, which implies the need for longer training times, particularly in the absence of normalization. We explore this in more depth when analyzing research question 9.
- 3.
k-NN:
Notably, in some cases, the training set cap needed to be set to 100, because the Flash size was a limiting factor for some MCUs. Hence, for different training sets, we also had a different number of neighbors (K). Accordingly, the accuracy is also affected by the decrease in training set size, since the number of examples used for training is reduced. This effect is apparent for Sonar with an F0 device. This dataset has sixty features, much more than the others (typically 10–20 features). The inference time varies a lot among datasets, microcontrollers and in comparison with the desktop implementations. This is because the k-NN inference algorithm always requires the exploration of the whole training set, and thus its size plays an important role in performance, especially for less powerful devices. In the multiclass problems, k-NN exploits the larger memory availability of H7 well, outperforming SVM, and reaching a performance level close to that of ANN. It is important to highlight that the Sonar labels were reasonably well predicted by k-NN compared to ANN and SVM (92% vs. 87% and 78%). In general, k-NN achieves performance levels similar to ANN, but requires a much larger memory footprint, which is possible only on the highest-end targets.
- 4.
DT:
When processing the EnviroCar dataset, the DT algorithm saturated the memory in most of the targets. We had to reduce the leaf size for all MCU families, apart from F7 and H7. However, this reduction did not significantly reduce the R2 value. In addition, DT performs worse than the others in two binary classification datasets, Heart and Sonar, and in the AQI regression dataset as well, but performs at the same level as the ANNs for the multiclass datasets and in the EnviroCar regression problem. Notably, DT achieves the fastest inference time among all algorithms, with F0 and F3 performing worse than the others, particularly in the regression problems.
As a rough summary of the first research question, we can conclude that ANN and, surprisingly, k-NN, had the highest accuracy in most cases, and Decision Tree had the shortest response time, but accuracy results were quite dependent on the dataset. The main difference between ANN and k-NN results is represented by the fact that high performance in ANN is achieved by all the targets (but not F0, which is not supported by the STM X-Cube-AI package), while k-NN poses much higher memory requirements. Concerning the timing performance, microcontrollers perform similarly to desktop implementations on the studied datasets. The only exception is found in k-NN, for which each inference requires the exploration of the whole dataset, and the corresponding computational demand penalizes the performance, especially on low-end devices. When comparing the edge devices, the best time performance is achieved by F7 and H7 (and we used default clock speeds, that can be significantly increased). Unsurprisingly, given the available hardware, F0 performs worse than all the others. Considering the score, we managed to train all the edge devices to achieve the same level of performance as the desktop in each algorithm, with the exception of k-NN in the multiclass tests (Peugeot), where only H7 is able to perform like a desktop, but with a significant time performance penalty. On the other hand, F0 performs significantly worse than the other edge devices in the k-NN Sonar binary classification.
5.2. Scaling
Feature preprocessing is applied to the original features before the training phase, with the goal of increasing prediction accuracy and speeding up response times [
34]. Since the range of values is typically different from one feature to another, the proper computation of the objective function requires normalized inputs. For instance, the computation of the Euclidean distance between points is governed by features with a broader value range. Moreover, gradient descent converges much faster on normalized values [
53].
We considered three cases that we applied on ANN, SVM, and k-NN: no scaling, MinMax Scaler, and Standard Scaler (Std) [
54]. The set of tables below (
Table 14,
Table 15,
Table 16,
Table 17 and
Table 18) show the accuracy of R
2 for all datasets under various scaling conditions. Most common DT algorithms are invariant to monotonic transformations [
55], so we did not consider DT in this analysis.
- 1.
ANN:
- 2.
SVM:
- 3.
k-NN:
These results clearly show the importance across all the datasets and algorithms of scaling the inputs. For instance, MinMax scaling allowed ANNs to reach 99% accuracy in Virus (from a 74% baseline), and Peugeot 14 (from 95%) and 0.86 R2 (from 0.70) in AQI. The application of MinMax allowed SVM to achieve 94% accuracy in Virus (form 71%) and 91% accuracy in Peugeot 14 (from 50%). Standard input scaling improved the k-NN accuracy of Heart from 63% to 83%. For large regression datasets, especially with SVM (see also research question 9), input scaling avoids large training times.
5.3. Principal Component Analysis (PCA)
Dimensionality reduction allows us to reduce the effects of noise, space and processing requirements. One well-known method is Principal Component Analysis (PCA), which performs an orthogonal transformation to convert a set of observations of possibly correlated variables into a set of values of linearly independent variables, which are called principal components [
24]. We tried different values of PCA dimension reduction: none, 30% (i.e., the algorithm selects a number of components such that the amount of variance that needs to be explained is greater than 30%), and automatic maximum likelihood estimation (mle) [
56], whose results are shown in
Table 19,
Table 20,
Table 21,
Table 22,
Table 23,
Table 24,
Table 25 and
Table 26.
- 1.
SVM:
- 2.
k-NN:
- 3.
ANN:
- 4.
DT:
The results reported in the above tables are quite varied. The 30% PCA value is frequently too low, except for the Sonar dataset, which has 60 features, much more than the others, and thus looks less sensitive to such a coarse reduction. For SVM, PCA does not perform better than or equal to mle, while the opposite is true for k-NN. Moreover, in ANNs, mle tends to provide better results, except AQI. In DT, there is a variance of outcomes. Mle does not perform any better than the other algorithms in Heart (78% vs. 67% accuracy) and Sonar (76% vs. 65%), while performance decreases for Peugeot 14 (93% vs. 99%) and AQI (0.49 vs. 0.65). For AQI, PCA never improves performance. The opposite is true for Heart and (except SVM) Sonar.
5.4. ANN Layer Configuration
To answer this question, we investigated performance among four ANN hidden-layer configurations, as follows:
One hidden layer of 50 neurons;
One hidden layer of 500 neurons;
Three hidden layers of 100 neurons each;
Four hidden layers with 300, 200, 100, 50 neurons, respectively.
By observing the results, we can see that deepening the network tends to improve the results, but only up to a certain threshold. For the Heart dataset, which has the lowest overall accuracy, we tried additional, deeper shapes beyond those reported in
Table 27,
Table 28 and
Table 29, but with no better results. On the other hand, widening the first layer provides only slightly better results (and in one case worsens them).
5.5. ANN Activation Function
Another relevant design choice concerns the activation function in the hidden layers. Activation functions are attached to each neuron in the network and define its output. They introduce a non-linear factor in the processing of a neural network. Two activation functions are typically used: Rectified Linear Unit (ReLU) and Tangent Activation Function (Tanh). On the other hand, for the output layer, we used a sigmoid for binary classification models as an activation function, and a softmax for multiclassification tasks. For regression problems, we created an output layer without any activation function (i.e., we use the default “linear” activation), as we are interested in predicting numerical values directly, without transformation.
Table 30 and
Table 31 show the highest accuracy achieved in hidden layers for each function, alongside its corresponding configuration.
The results are similar, with a slight prevalence of ReLU, with a valuable difference for Sonar (+7% accuracy) and AQI (+5% R2).
5.6. ANN Batch Size
The batch size is the number of training examples processed in one iteration before the model being trained is updated. To test the effect of this parameter, we considered three values, one, 10, and 20, keeping the number of epochs fixed to 20.
Table 32 shows the accuracy of each dataset for various batch sizes.
The results show that the value of 10 provides optimal results in terms of accuracy. Actually, the difference becomes relevant only for the case of AQI. A batch size equal to one poses an excessive time overhead (approximately 30% slower than the batch size of 10), while a batch size of 20 achieves a speedup of about 40%.
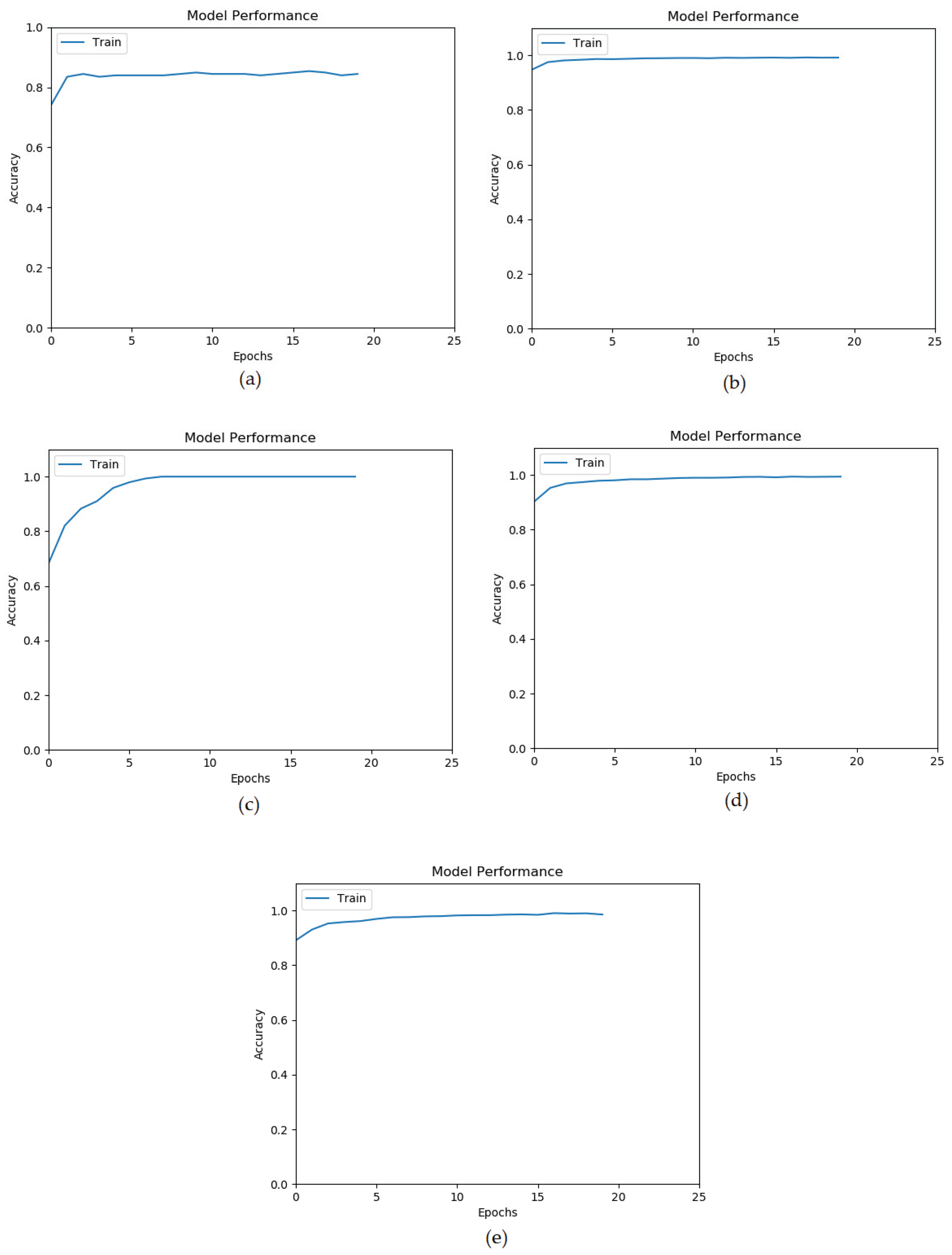
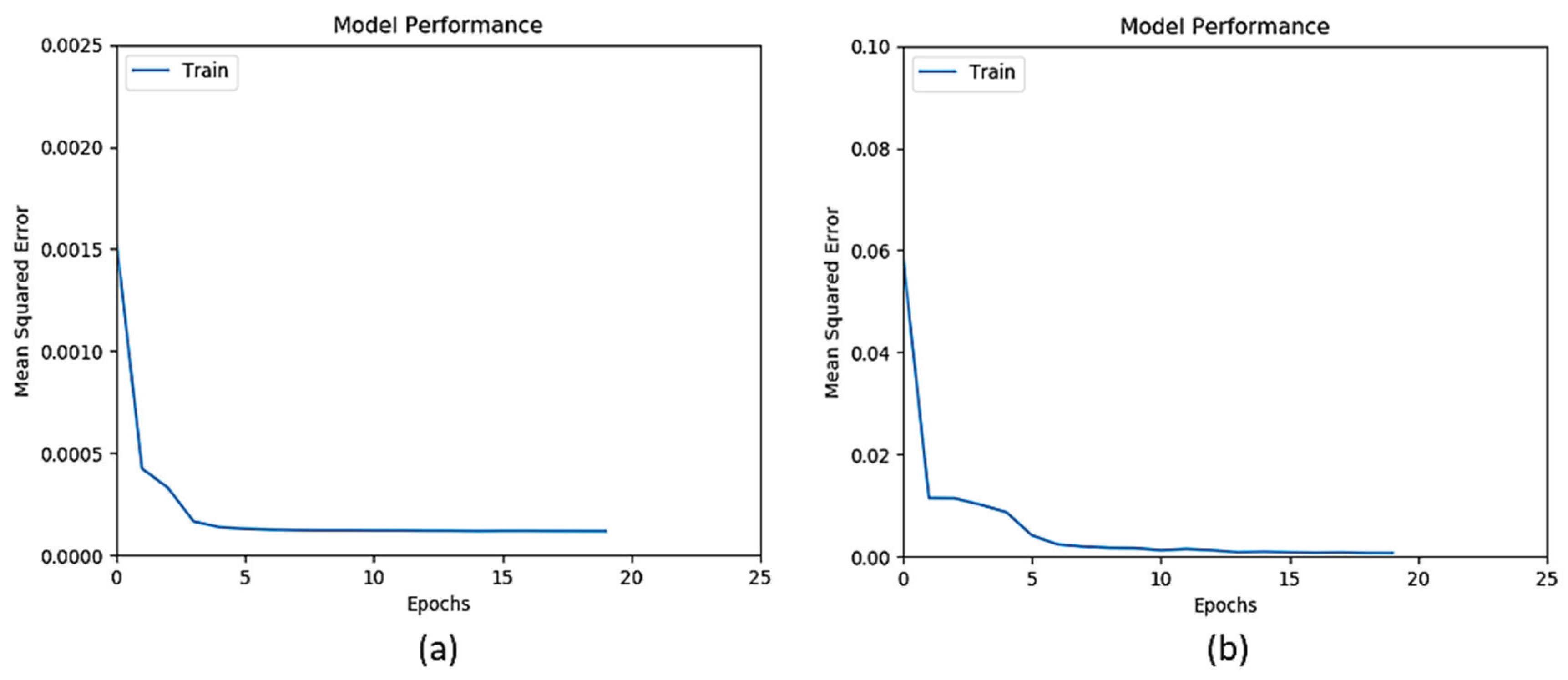
5.7. ANN Accuracy vs. Epochs
ANN training goes through several epochs, where an epoch is a learning cycle in which the learner model sees the whole training data set.
Figure 3 and
Figure 4 show that the training of ANN on all datasets converges quickly within 10 epochs.
5.8. ANN Dropout
Dropout is a simple method to prevent overfitting in ANNs. It consists of randomly ignoring a certain number of neuron outputs in a layer during the training phase.
The results in
Table 33 show that this regularization step provides no improvement in the considered cases, but has a slight negative effect in a couple of datasets (Sonar and AQI).
5.9. SVM Regularization Training Time
In SVM,
C is a key regularization parameter, that controls the tradeoff between errors of the SVM on training data and margin maximization [
13,
57]. The classification rate is highly dependent on this coefficient, as confirmed by
Table 8 and
Table 9. Desk-LM uses the grid search method to explore the C values presented by the user, which require long waiting times in some cases. To quantify this, we measured the training latency time in a set of typical values (
C = 0.01, 0.1, 1, 10, and 100), with the results provided in
Table 34.
Different values of the C parameter have an impact on the training time. The table shows that higher C values require higher training time. We must stress that the above results represent the training time for the best models. In particular, when no normalization procedure was applied, the training time using large values of C became huge (also up to one hour), especially for regression datasets.
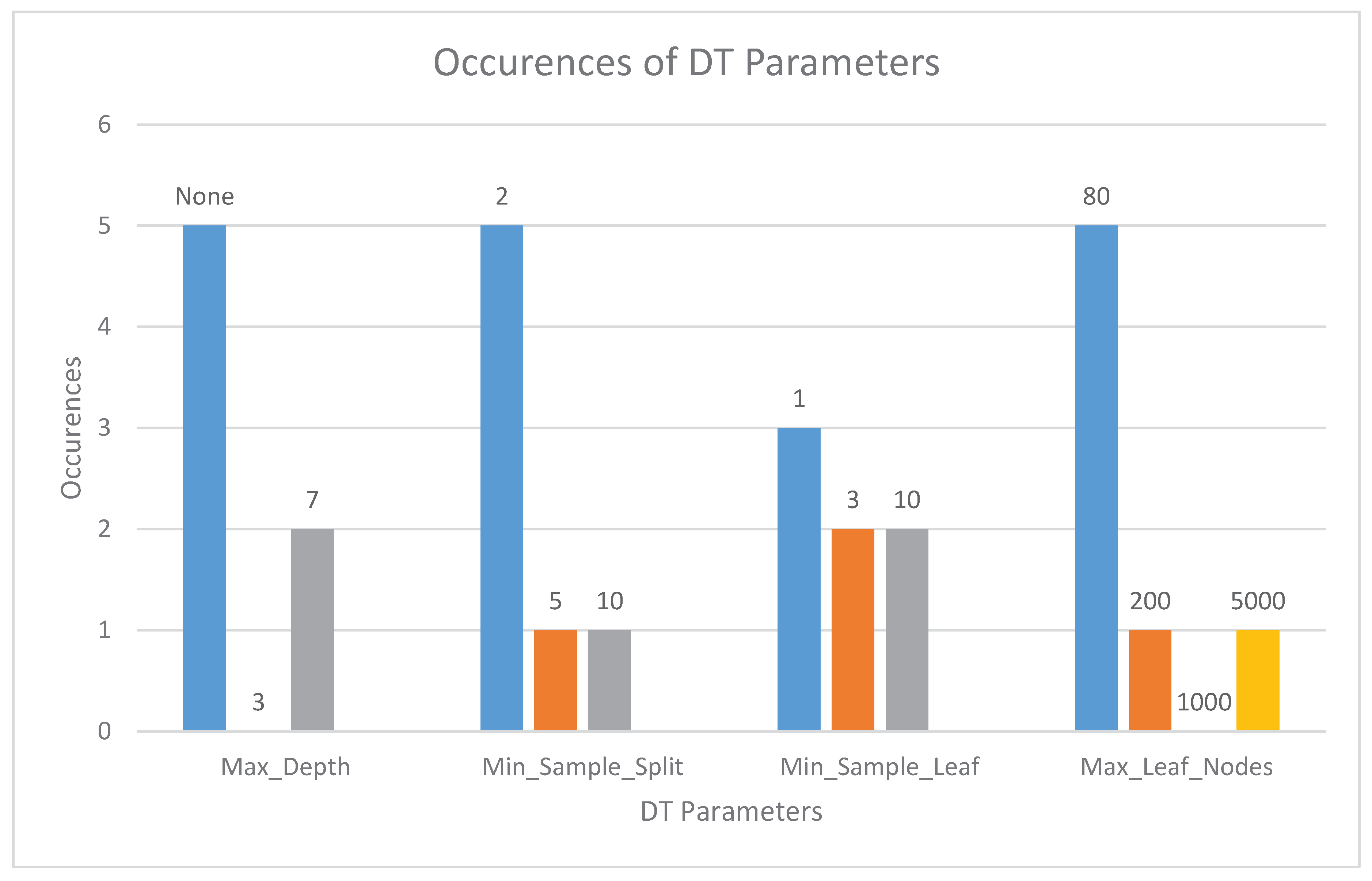
5.10. DT Parameters
Tuning a decision tree requires us to test the effect of various hyperparameters, such as
max_depth,
min_simple_split.
Figure 5 shows the distribution of the tested parameter values for the best models in the different datasets (see also
Table 13 to see the best results).
In most cases, the whole tree depth is needed, and this does not exceed the memory available in the microcontrollers. However, Max_Leaf_Nodes values usually need a low threshold (80). EnviroCar required a high value of 5000, which had to be reduced down to 1000 for F3, F4, L4 and to 200 for F0 because of the limited RAM availability.
6. Conclusions and Future Work
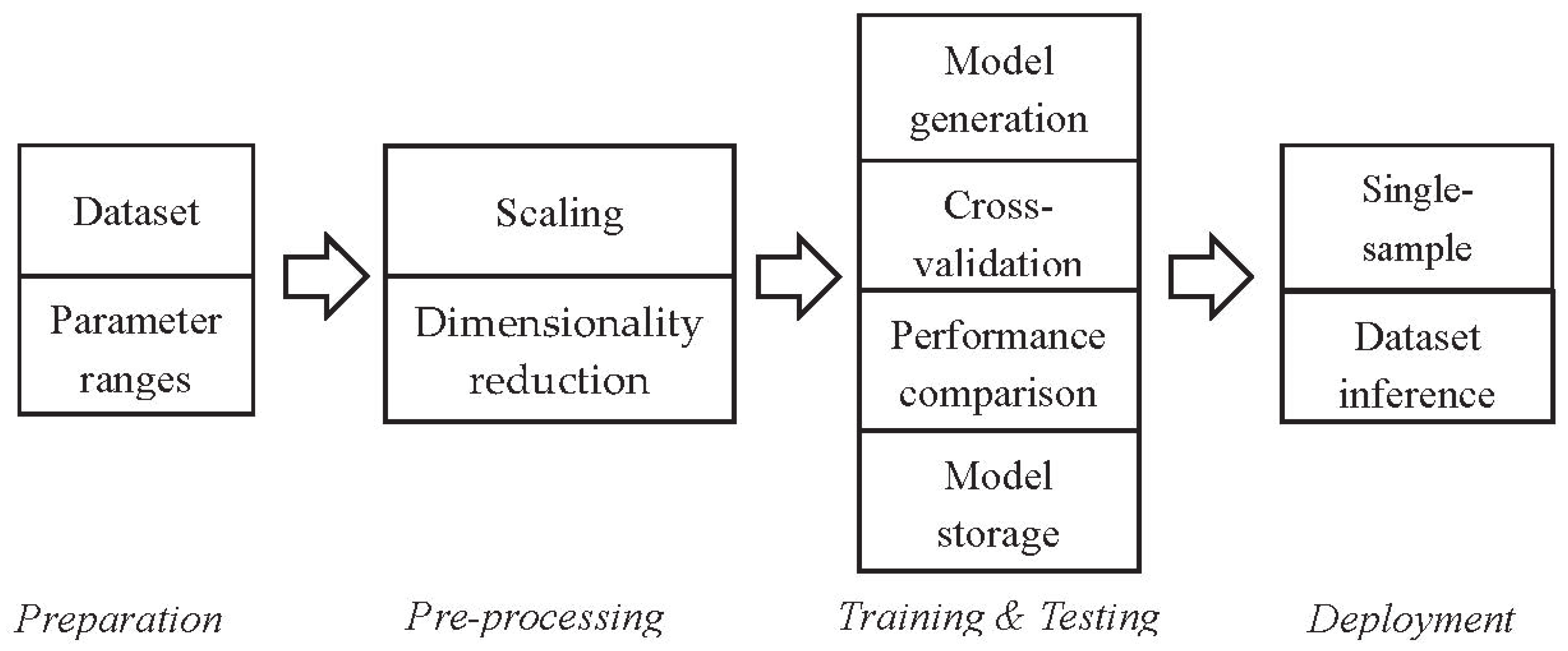
This paper presented the Edge Learning Machine (ELM), a machine learning platform for edge devices. ELM performs training on desktop computers, exploiting TensorFlow, Keras, and scikit-learn, and makes inferences on microcontrollers. It implements, in platform-independent C language, three supervised machine learning algorithms (Linear SVM, k-NN, and DT), and exploits the STM X-Cube-AI package for implementing ANNs on STM32 Nucleo boards. The training phase on Desk-LM searches for the best configuration across a variety of user-defined parameter values. In order to investigate the performance of these algorithms on the targeted devices, we posed ten research questions (RQ 1–10, in the following) and analyzed a set of six datasets (four classifications and two regressions). To the best of our knowledge, this is the first paper presenting such an extensive performance analysis of edge machine learning in terms of datasets, algorithms, configurations, and types of devices.
Our analysis shows that, on a set of available IoT data, we managed to train all the targeted devices to achieve, with at least one algorithm, the best score (classification accuracy or regression R2) obtained through a desktop machine (RQ1). ANN performs better than the other algorithms in most of the cases, without differences among the target devices (apart from F0, that is not supported by STM X-Cube-AI). k-NN performs similarly to ANN, and in one case even better, but requires that all the training sets are kept in the inference phase, posing a significant memory demand, which penalizes time performance, particularly on low-end devices. The performance of Decision Tree performance varied widely across datasets. When comparing edge devices, the best time performance is achieved by F7 and H7. Unsurprisingly, given the available hardware, F0 performs worse than all the others.
The preprocessing phase is extremely important. Results across all the datasets and algorithms show the importance of scaling the inputs, which lead to improvements of up to 82% in accuracy (SVM Virus) and 23% in R2 (k-NN Heart) (RQ2). The applications of PCA have various effects across algorithms and datasets (RQ3).
In terms of the ANN hyperparameters, we observed that increasing the depth of a NN typically improves its performance, up to a saturation level (RQ4). When comparing the neuron activation functions, we observed a slight prevalence of ReLU over Tanh (RQ5). The batch size has little influence on score, but it does have an influence on training time. We established that 10 was the optimal value for all the examined datasets (RQ6). In all datasets, the ANN training quickly converges within 10 epochs (RQ7). The dropout regularization parameter only led to some slight worsening in a couple of datasets (RQ8).
In SVM, the C hyperparameter value selection has an impact on training times, but only when inputs are not scaled (RQ9). In most datasets, the whole tree depth is needed for DT models, and this does not exceed the memory available in the microcontrollers. However, the values of Max_Leaf_Nodes usually require a low threshold value (80) (RQ10).
As synthesized above, in general, several factors impact performance in different ways across datasets. This highlights the importance of a framework like ELM, which is able to test different algorithms, each one with different configurations. To support the developer community, ELM is released on an open-source basis.
As a possible direction for future work, we consider that the analysis should be extended to include different types of NNs (Convolutional Neural Networks, Recurrent Neural Networks) with more complex datasets (e.g., also including images and audio streams). An extensive analysis should also be performed on unsupervised algorithms that look particularly suited for immediate field deployment, especially in low-accessibility areas. As the complexity of IoT applications is likely to increase, we also expect that distributed ML at the edge will probably be a significant challenge in the coming years.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}