2.1. Overview
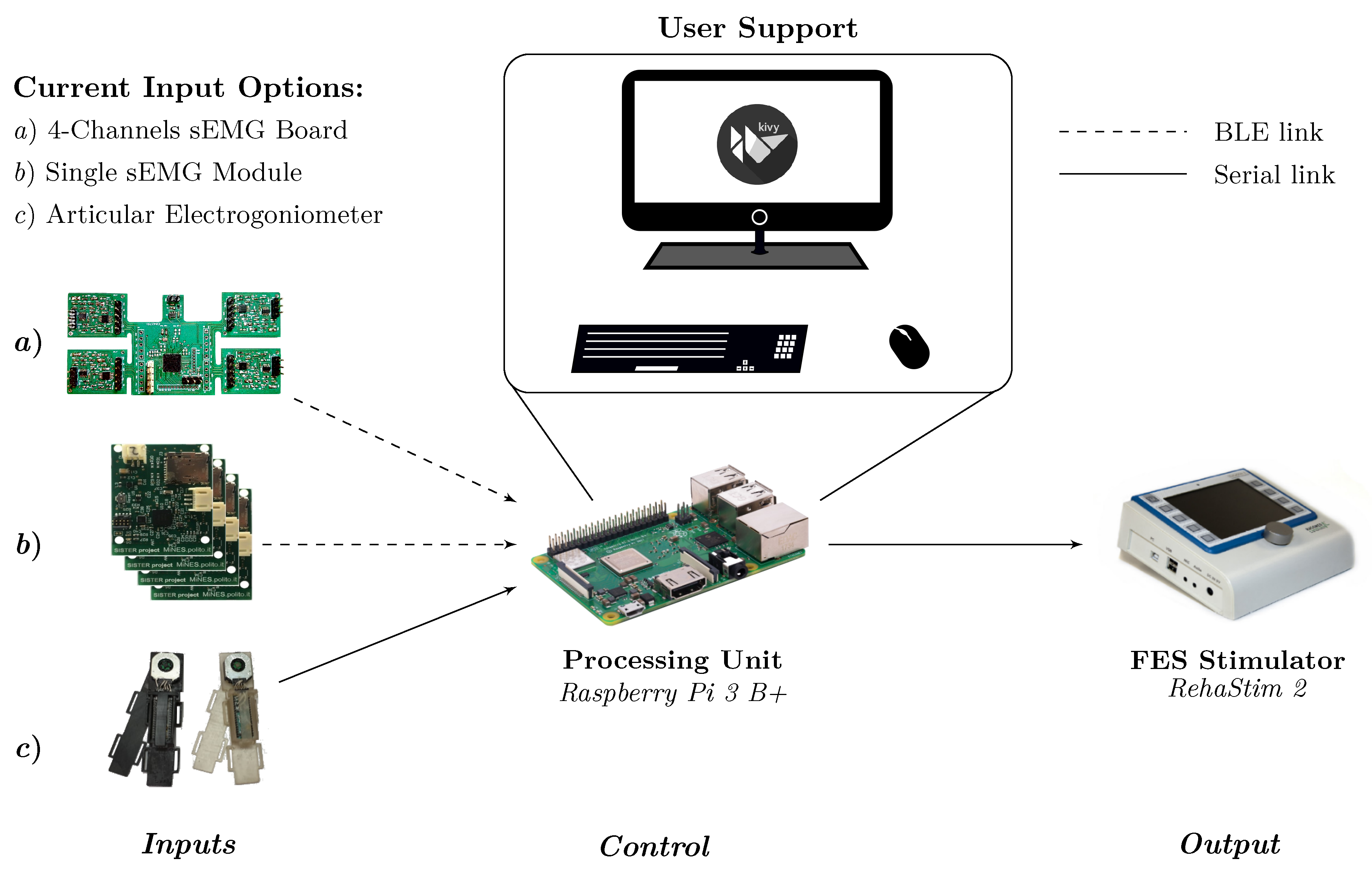
A description of the proposed system can be conceptually schematized into inputs, control and output logical macro areas, as represented in
Figure 1, according to the actions flow from signal acquisition to stimulation application. Data acquired by input devices (i.e., muscular activation and limbs motion) are processed by the control unit in order to drive the FES application through the output device.
We designed a flexible enough framework by developing a multi-platform software core, compatible with widespread Operating Systems (OSs) (such as Microsoft® Windows®, GNU/Linux and Android), able to run on commonly available devices, i.e., PC, laptop, tablet, smartphone as well as Raspberry Pi.
Among all the possibilities, we defined our optimized embedded version of the system as Reference Hardware Setup (RHS), which comprises individual acquisition channels for sEMG and electro-goniometers as inputs, Raspberry Pi as control logic and the RehaStim 2 FES stimulator as output. With respect to RHS, other configurations are characterized by changes in the inputs and control devices (i.e., a Microsoft® Windows® or GNU/Linux PC), which lead to slight variations in the wireless connectivity management and software structure.
2.2. Hardware Platform
The input devices are the sensors useful to record the signals of interest, i.e., the electrical signals produced by the muscles contraction (sEMG signal) during the execution of a movement and the angular signals representing the limbs motion of the human body.
In the first case, the employed device has to amplify and filter the muscular signal in order to allow its interpretation, since the raw signal amplitude varies between hundreds of µV and tens of mV [
20]. Therefore, referring to the guidelines reported in [
21], we developed an analog conditioning circuit for the bio-signal [
9], which, using the three-electrodes differential approach (two as sources, one for reference), provides 1000 gain factor in the 30
to 400
bandwidth (obtained as a cascade of a differential first-order high-pass filter [
22] and a second-order Sallen-Key low-pass filter [
23]) in order to filter out electrode-skin movement artifact and high-frequency noise. Moreover, since the sEMG module has to be coupled with FES stimulator, we added overvoltage protection diodes on the channels input. As introduced, we carried out the first step of our event-driven signal processing by extracting the TC signal using an hysteresis voltage comparator ( 30
) so to avoid spurious glitches. The average counts of events (ATC) is then computed at the digital interface with the microcontroller (MCU): in [
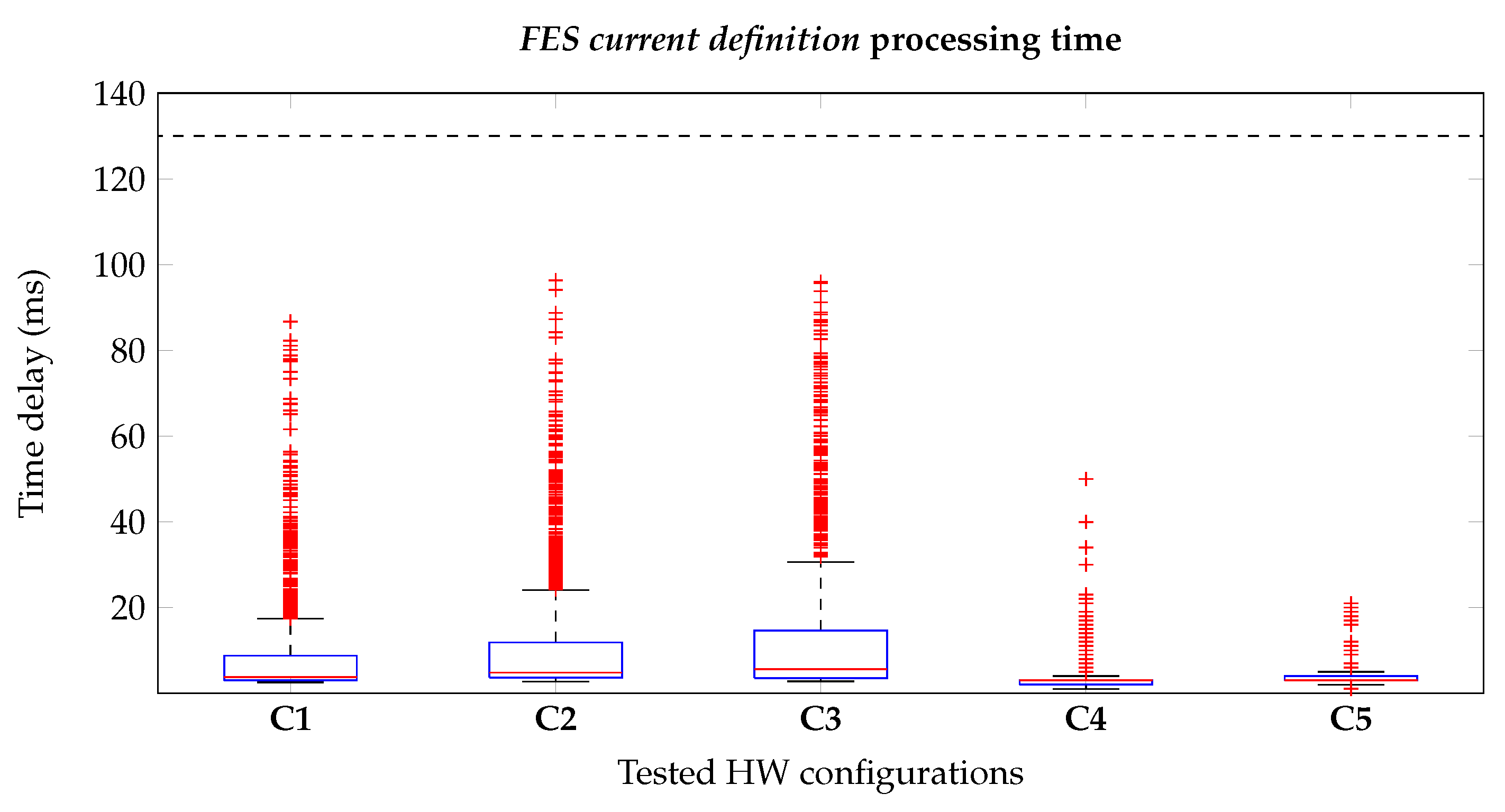
10], we demonstrated how to accomplish this task minimizing the MCU resources to a GPIO interrupt, which detects the TC digital events, and a timer, which defines the observation window. The length of the window is set to 130 ms as reported in the tests presented in [
9], where this value has been proved to be an optimal trade-off between the time resolution of the muscle activation and the discrimination of different levels of generated muscular force.
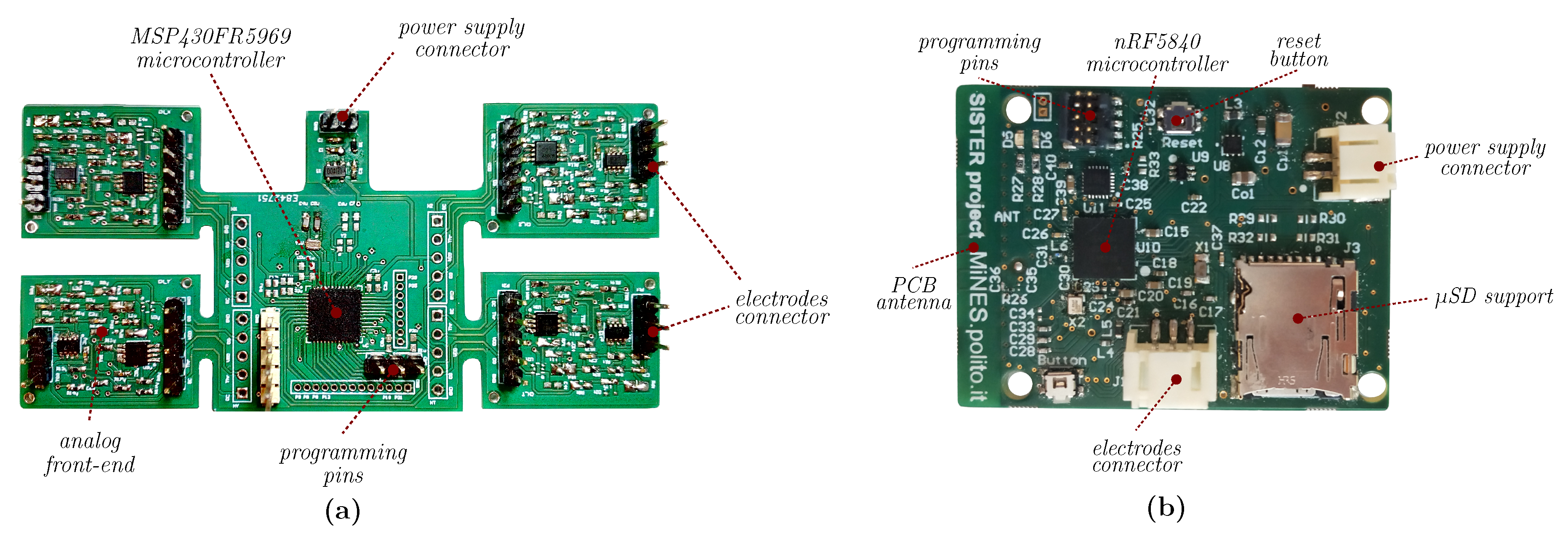
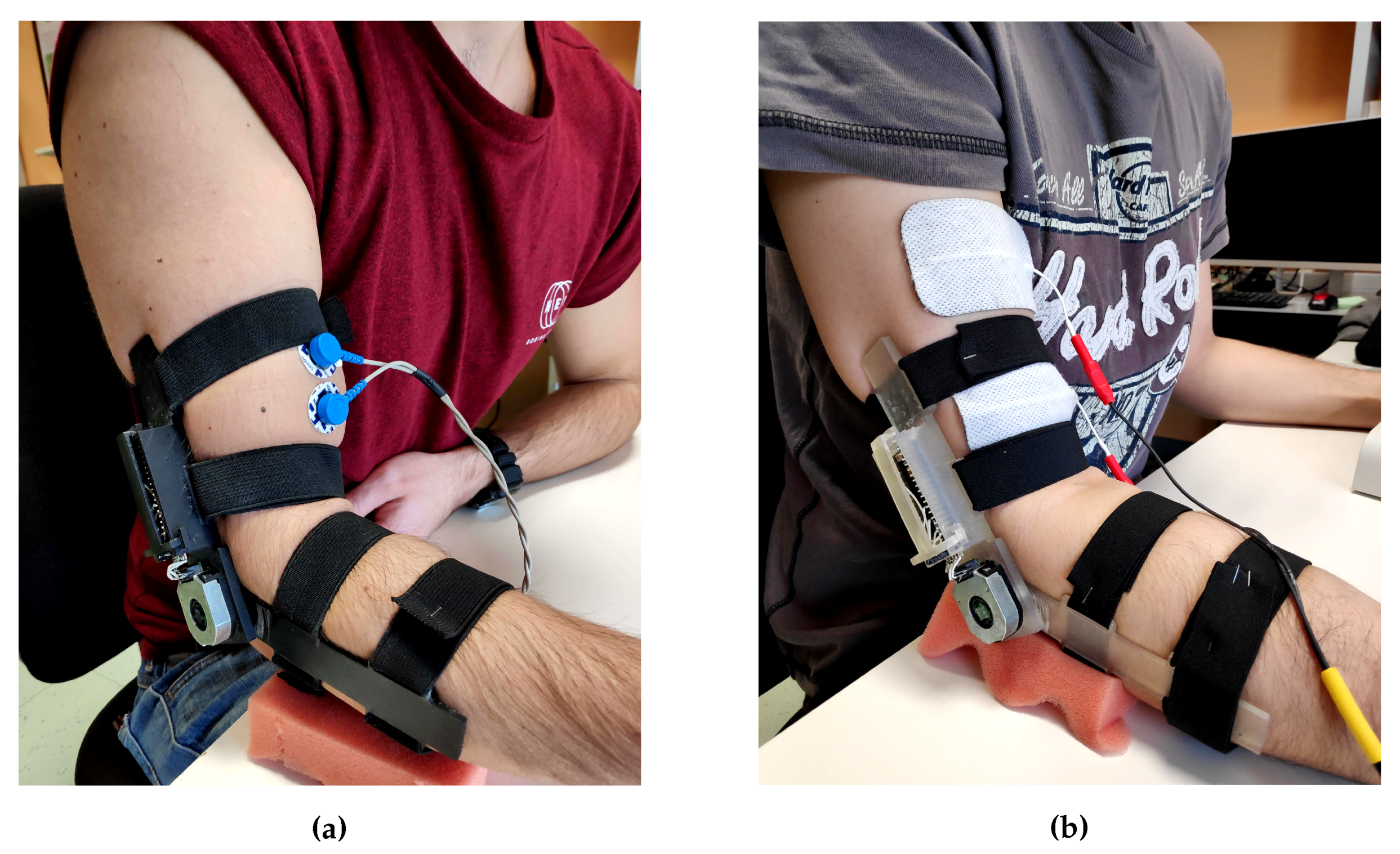
We propose two solutions based on this acquisition and processing architecture, shown in
Figure 2, depending on the user needs: The first option (a) is a complete four-channels board suitable for multiple-muscle monitoring on the same limb, e.g., extensor and flexor muscles of human forearm, while the second one (b) is a stand-alone single-channel module to be used independently when an individual detection is advantageous, e.g., biceps- and triceps- brachii muscles during the elbow flexion and extension. We equipped both solutions with wireless connectivity in order to improve a freedom movement executions, avoiding wiring hindrance, and to make the systems fully wearable: among the wide list of wireless (standard) option, we chose the Bluetooth Low Energy (BLE) protocol (stack 4.1 [
24]) because of its low-energy features, which perfectly match with battery-device requirements. In particular, we equipped (a) with the Microchips RN4020 [
25] module (with its own antenna), while in (b) the same MCU used for computing the ATC runs the BLE stack and directly feeds a PCB antenna, designed referencing to [
26].
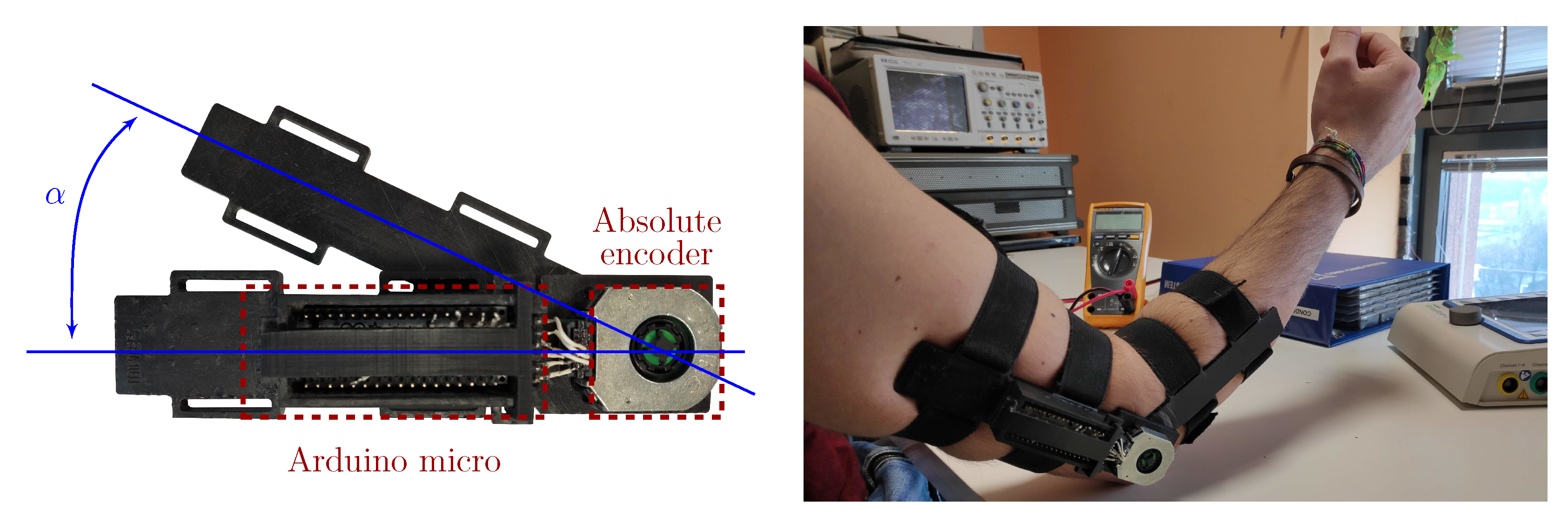
As second input typology, we developed custom electro-goniometers in order to record the limbs motion in form of electrical signals.
Figure 3 shows their structure (very similar to standard goniometer’s one), which basically consists of two parts fixed by a pivot at one extremity. Employing an absolute capacitive modular encoder, i.e., the AMT20 [
27], and placing its center in correspondence of the pivot, we were able to detect the goniometer’s angle decoding the encoder shaft position related to its inner capacitance changes. Angle values are represented on 12, with a 0.2 accuracy and, since the AMT20 presents an SPI output line, we interfaced it with an Arduino micro MCU [
28] in order to sample the signal at 80
(appropriate w.r.t. human movement velocity [
29]) and to transmit it to an external device (via USB cable) for graphical representation. The goniometer case has been manufactured by a 3D printing process, employing the Form 2 printer [
30] with a bio-compatible photo-reactive resin, which allowed us to design an anatomical comfortable and lightweight structure. Four elastic strips secure the electro-goniometer in the proper location on the limb, ensuring its pivot to be in position with the rotation center of the articulation.
The control of the induced FES pulses depends on how they are electrically generated and which pulse parameters can be modified during the stimulation. We decided for the medical-certified RehaStim 2 [
31] because it allowed us to have an advanced control on the pulse definition per channel and the possibility to be easy interfaced with an external device by means of the ScienceMode2 bidirectional communication protocol [
32].
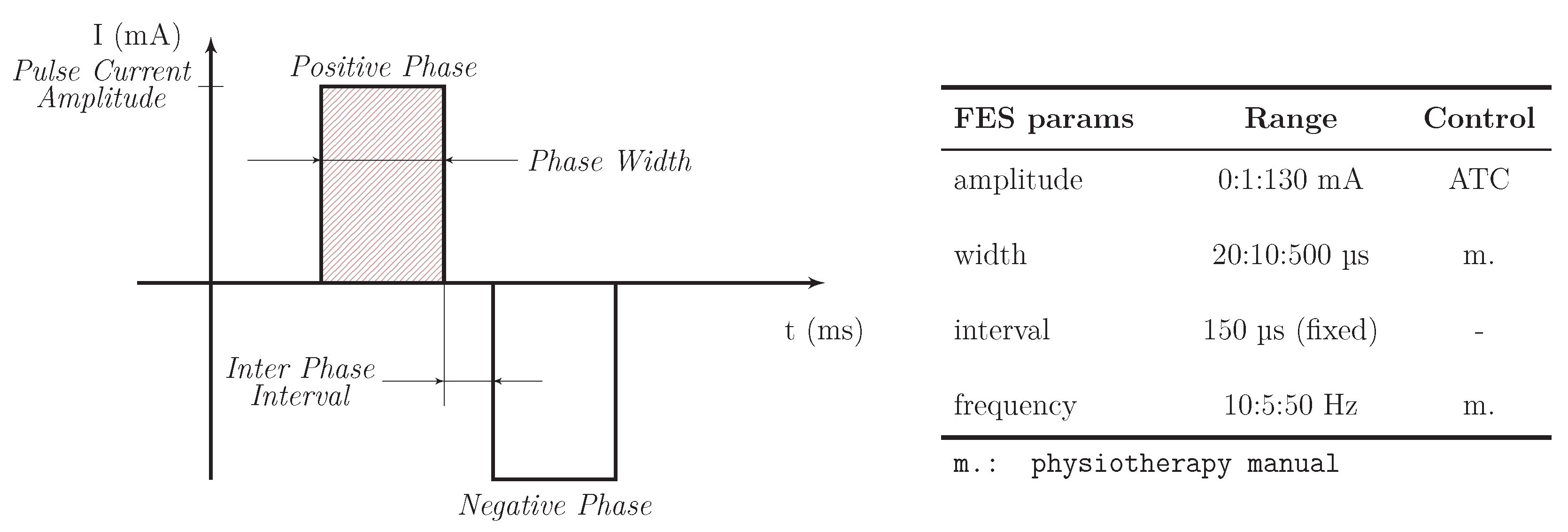
The generated current pulses are characterized by a biphasic rectangular shape, shown in
Figure 4, whose configurable parameters are the pulse amplitude, the stimulation frequency and the phase width, while the inter-phase interval is fixed to 150 μs guaranteeing a proper stimuli excitability [
33].
Therefore, considering the ATC dependency on the muscle force (e.g., correlation between ATC and sEMG amplitude/energy indicators), our idea has been to modulate the FES pulses intensity on the basis of such parameter, while for the other settings we referred to the physiotherapy manual provided with the stimulator [
34]. In this way, the modulation approach allows us to excite the muscle fibers with the proper amount of current during all the phases of a movement session (warm up, increasing force, relaxation as well as resting state) and for a wide list of exercises.
Last part of the system is represented by the Raspberry Pi, model 3 B+ [
35], working as control logic which manages the entire system. Indeed, it runs the main software controlling the data acquisition, its processing, the stimulation definition and application. Moreover, since this Raspberry Pi is equipped with four USB ports and a full size HDMI, we improved the system usability developing a complete GUI and employing some peripherals, as keyboard, monitor and mouse.
As discussed in
Section 2.1, different devices can act as control unit appropriately configuring the hardware: As an example, if a Microsoft
® Windows
® OS PC is used as control logic, the CC2540-Dongle [
36] module is needed to communicate with the acquisition devices (limiting the maximum number of simultaneously connections to three) since Windows
® machines do not allow an easy access to the Bluetooth interface.
2.3. Software Overview
As previously introduced in
Section 2.1, although the project is finalized to the development of an embedded system, we want to provide a modular and flexible software core able to fulfill the compatibility requirements of different OSs. As previously introduced in
Section 2.1, we provided a modular and flexible software core able to fulfill the compatibility requirements of different OSs. Consequently, from the development standpoint, we based the software on the Python language, because of its cross-platform nature, its widespread adoption, and the large availability of third-party multi-platform libraries (such as standard library for multi-threading features or Kivy library [
37] for the GUI). Moreover, the embedded software has been based on an object-oriented (OO) framework in order to promote flexibility, modularity and robustness [
38] (e.g., leveraging encapsulation, inheritance, and composition features), allowing a seamless integration and management of several devices (e.g., different input modules) along with the possibility of future integration of new processing algorithms. We also implemented a multi-threaded architecture in order to map the functional tasks onto different running threads [
39], so to optimize the use of computational resources and to avoid complex (run-time) code interdependencies.
2.3.1. Classes Diagram Overview
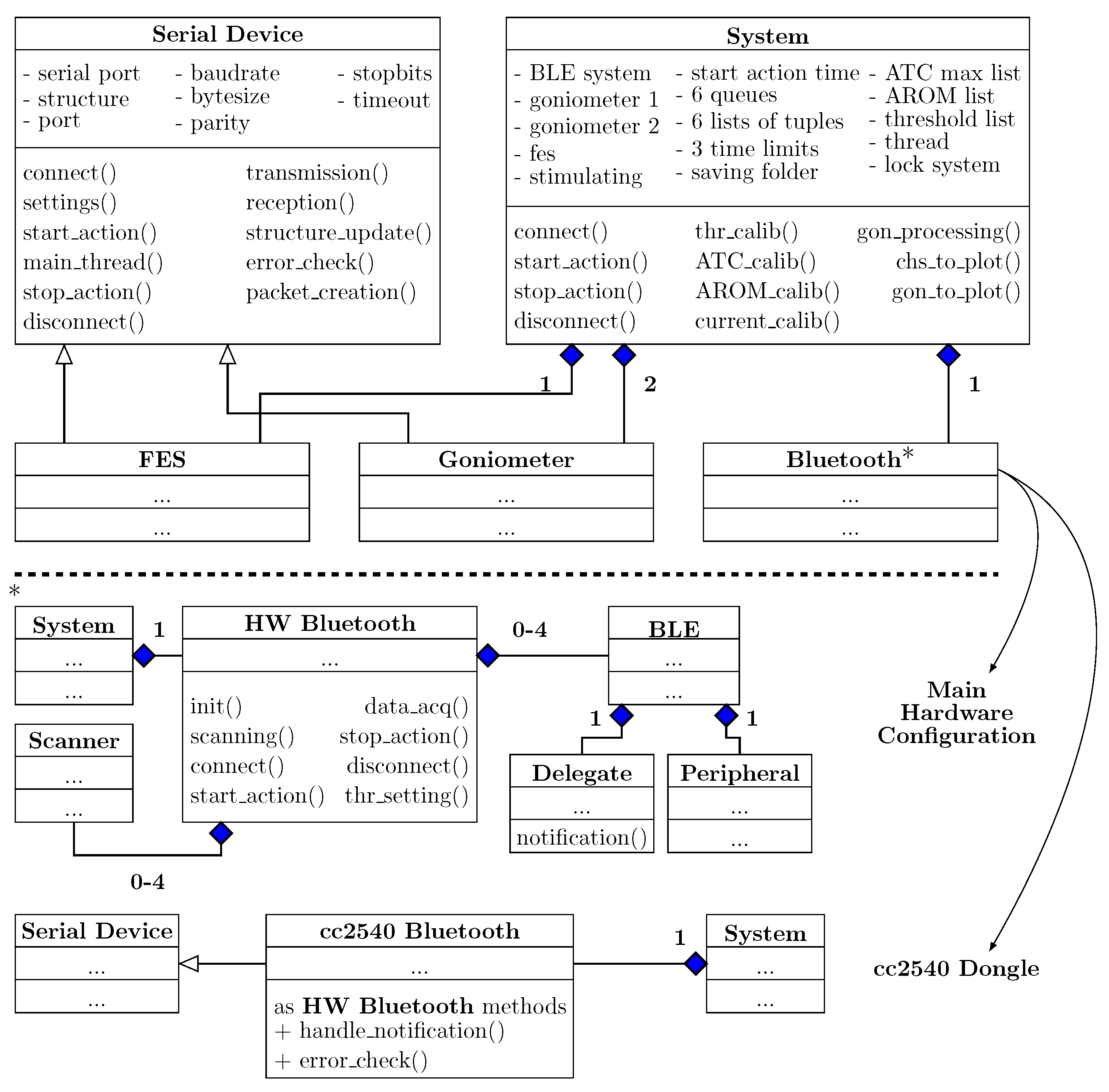
As shown in the Unified Modeling Language (UML) diagram in
Figure 5, the main System object is composed by four sub-objects: The FES class representing the stimulator, two Goniometer classes for the developed electro-goniometers and a Bluetooth class, which can have different implementations depending on the hardware configuration.
Since both the goniometers and the stimulator are wired connected to the control unit, their classes inherit from an abstract custom Serial Device class, which provides a standard interface for every serial device (i.e., serial port, baudrate, stopbits, etc. attributes or connect(), settings(), transmission() methods and so on). Specific methods of different serial devices have been overwritten in order to provide the proper interfacing with the control unit.
Regarding the BLE software, it depends by system configurations: if the RHS is used, we combined the BlueZ [
40] Linux Bluetooth stack with the bluepy [
41] Python library (specific for low energy features). In particular, the HW Bluetooth class is composed by a variable number (zero to four) of BLE connections, which in turns consists of by a Delegate (notification data handling) and a Peripheral (bluepy instance for encapsulating BLE BlueZ connection) objects, and a Scanner, which seeks for advertising devices. On the other hand, if a common PC is employed, the CC2540-Dongle module is needed and, since it communicates through a serial port with the workstation, the Bluetooth class inherits from the Serial Device one.
2.3.2. Multi-Threading
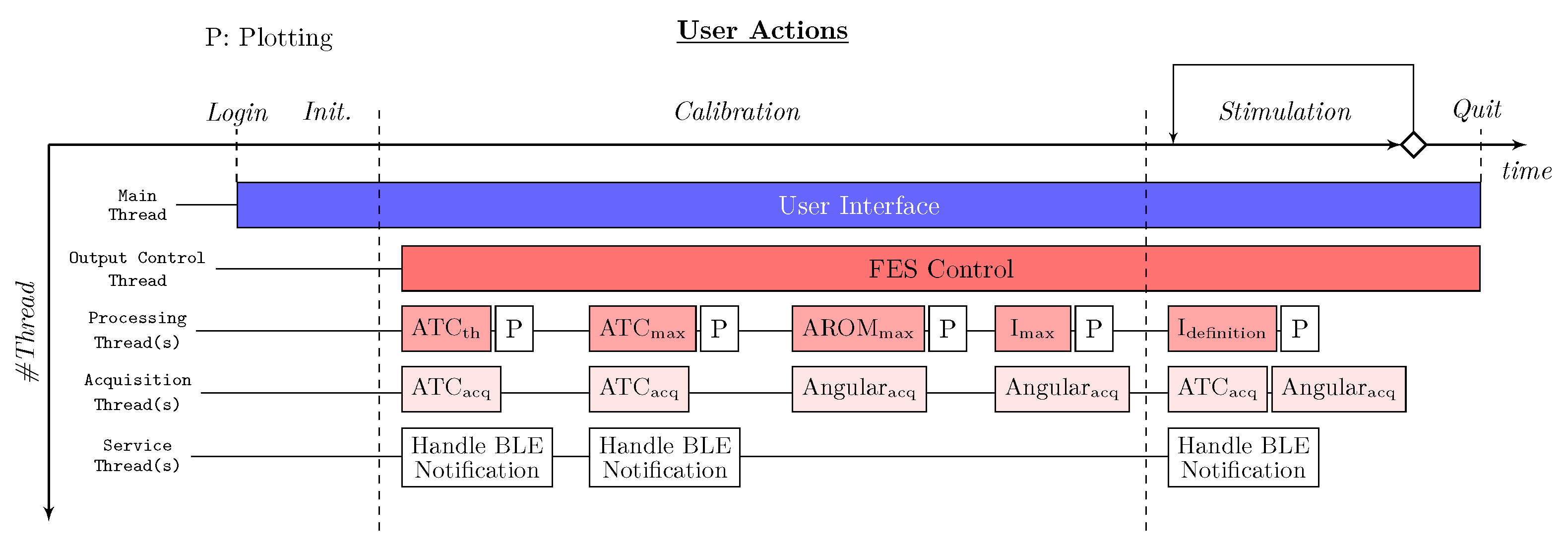
Figure 6 shows the multi-threading structure of the system and the running state of the involved threads during a typical stimulation session.
The Main Thread starts after the user login and runs all along the session waiting for the user inputs, at which correspond the creation of child threads, handling the user interface. As primary sub-thread, the Output Control Thread manages the communication with the stimulator, e.g., watchdog timer, packet creation etc., during the calibration and stimulation phases. Moreover, the Main Thread runs all the calibration-step threads (i.e., ATC
th, ATC
max, AROM
max and I
max, details in
Section 2.4) during the settings and the I
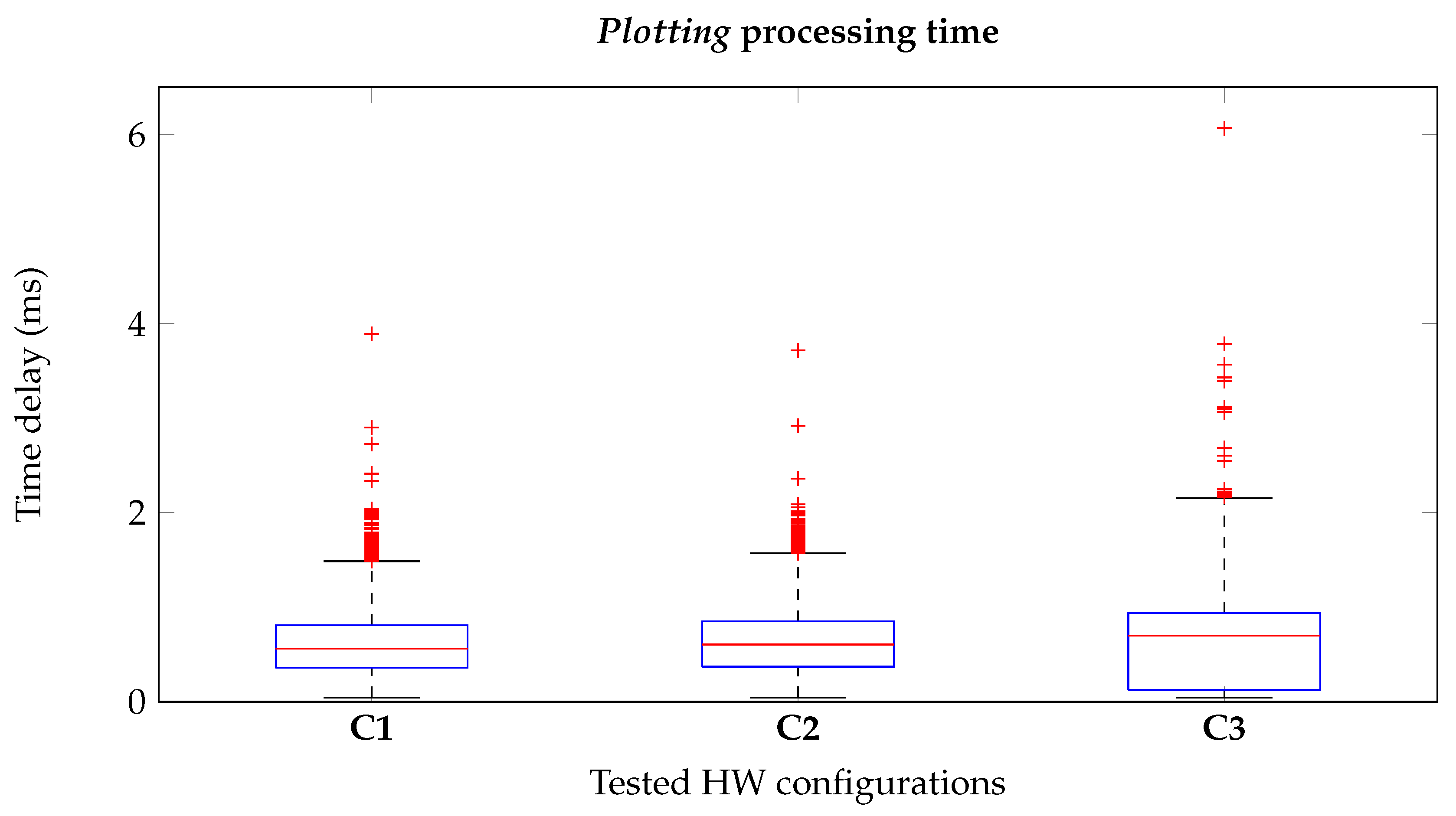
definition threads when the stimulation is applied, globally defined as Processing Threads. Each of them is also supported by a Plot thread, represented by white rectangle, which graphically represents the useful signals. Finally, we developed the Acquisition Threads, divided into ATC
acq and Angular
acq for the ATC and angular values acquisition, and Service Thread for BLE notifications managing. Data exchange among threads is organized with queue objects; therefore, each thread implements a specific method in order to continuously check the queue status.
2.3.3. Graphical User Interface
The GUI has been developed choosing the Kivy Python library [
37], due to OS inter-compatibility, modern layout, open-access feature and optimized performance [
42], in order to have an easy, intuitive, and practical high-level control of the application.
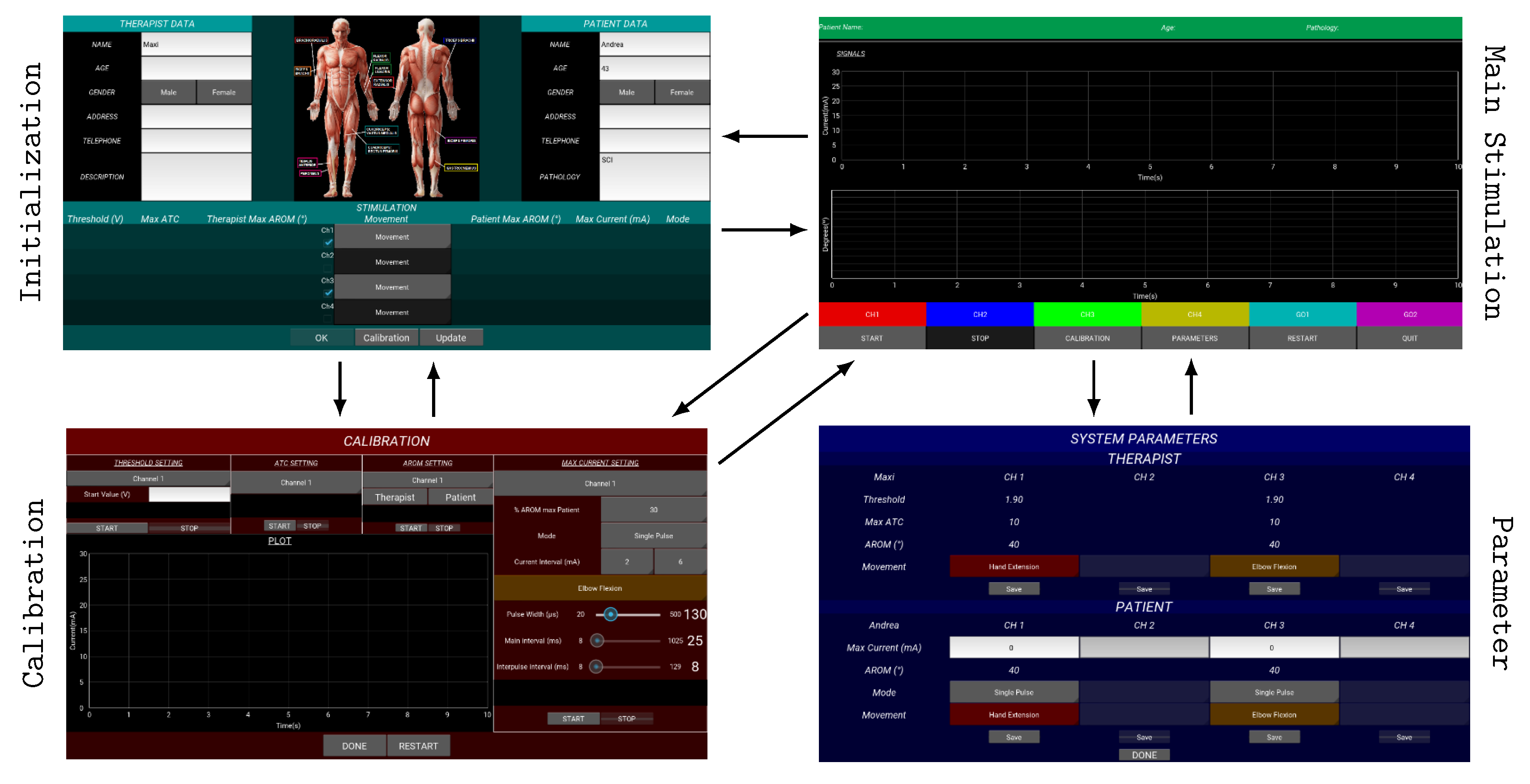
Figure 7 shows the main four screens of the GUI. In the Initialization one, the user inserts the personal information of therapist and patient, and chooses the system configuration (acquisition and stimulation channels) along with the movement that will be executed. The Calibration screen is properly designed to perform the calibration process, whereby the acquisition and stimulation parameters are optimized for the user-case. Subjects data are used to build up a database, useful to fast-configure application settings avoiding the calibration steps. In the Main Stimulation screen, the stimulation can be started and stopped, and the useful signals are graphically represented (i.e., pulse amplitude and angular signals) in order to provide a visual feedback for the therapist. Lastly, the Parameters screen allows the user to modify the parameters or save them if multi-session scenarios are expected. Transitions among the screens, represented by black arrows in
Figure 7, have been arranged using the Screen Manager object, facilitating user navigation among sections.
From an OO prospective, all the screens directly inherit from the Kivy Screen class, with the exceptions of the ones containing graphs (i.e., Main Stimulation and Calibration) which are also defined by the MyPlotScreen class since it possesses Kivy plotting objects. Thus, the System is aggregated in every main screen where the system actions run through screens widgets.
Lastly, on the Raspberry Pi, we changed the RAM memory assigned to the Graphics Processing Unit (GPU) from 64 to 256 in order to execute the GUI without impacting on the graphical resources.
2.4. ATC Dataflow: Processing and Calibration
The definition of the FES pulses amplitude dependent on the ATC values is the core of the FES control mechanism, linking the data acquisition with the stimulation one. Since embedded device has extremely low-computational power, we needed to implement this process trying to maintain the complexity lower as much as possible, also considering fast computing approach to respect real-time requirements. In this scenario, taking advantage of the sEMG-ATC (pre-)processing, our idea is to mimic the simplicity of a look-up table structure: Basically, we organized it as two matrices architecture, one for the ATC values and one for the FES current ones, with one-to-one cell correspondence between them.
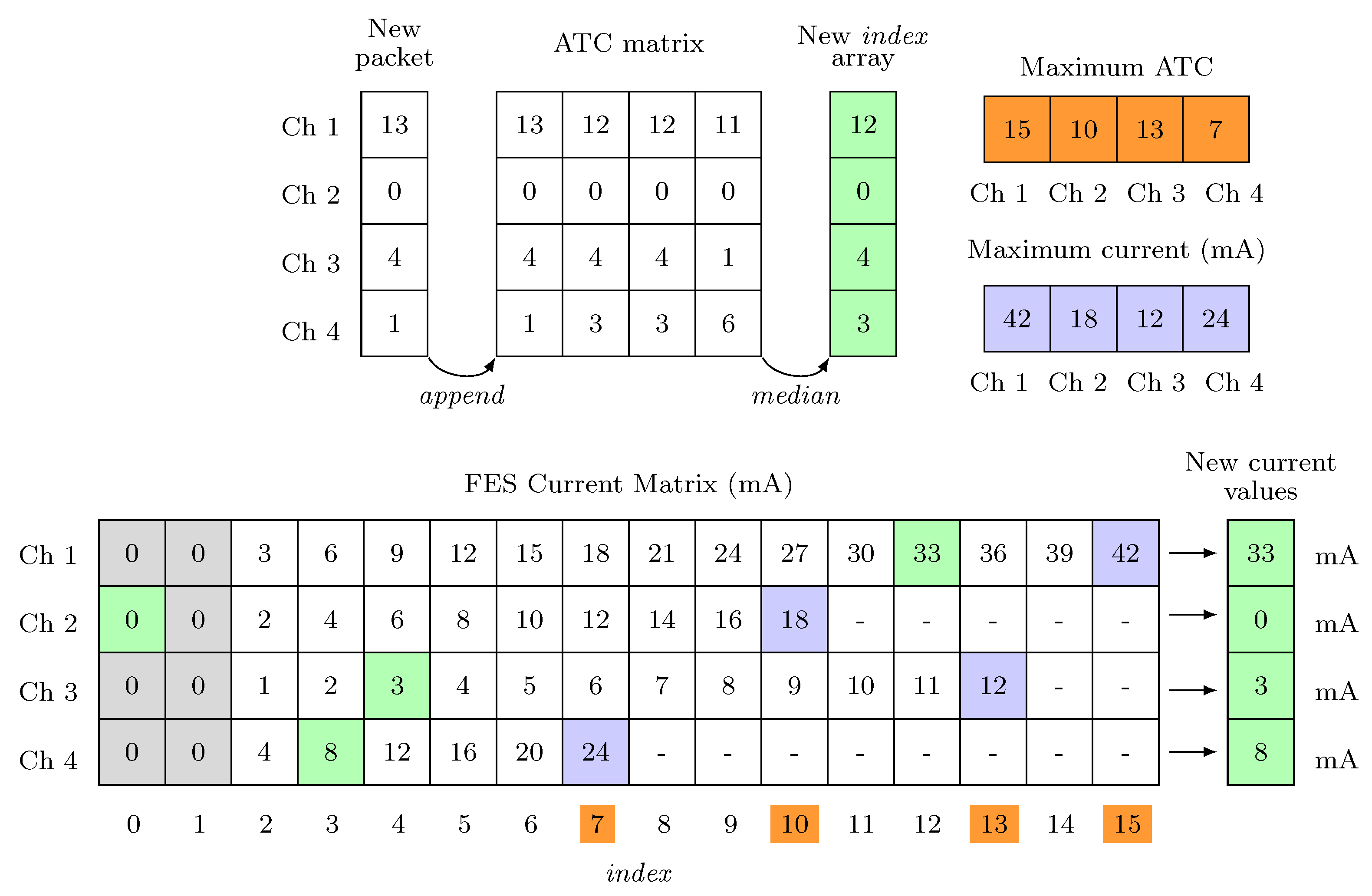
Typical application scenario, considering
n active channels, is represented in
Figure 8: Every time a new BLE packet arrives, containing the ATC data of n channels, the received data are appended to an n×4 matrix (ATC matrix), which also includes the three past ATC-window data. Then, the row-median operation is computed in order to obtain a robust ATC value without any noise corruptions. Since the ATC matrix is continuously updated (every ATC window), this operation basically represents a moving median. In this way, we obtain a n×1 array, whose values are interpreted as indexes pointing to the FES current values stored into the FES Current Matrix. Once the new stimulation data are defined through this algorithm, a FES data packet is built up and the command is transmitted to the stimulator.
However, since different subjects could produce different ATC values or be stimulated by a diverse amount of current, a calibration process for the optimization of the acquisition (therapist) and stimulation (patient) parameters is fundamental, permitting us to develop a flexible system, able to suit different users, while maintaining the benefits of a proper and safe per-subject stimulation. Hence, we defined a four-steps calibration process as follows:
Threshold setting: The generation of the TC events strongly depends on the threshold value. Therefore, we tried to optimized the TCs setting the threshold just above the sEMG signal baseline in order to maximize the events with the minimal muscle effort. To accomplish this task, the therapist has to maintain a rest limb condition and, starting from an initial threshold value, we decrease it step-by-step until we find the baseline. Final threshold is set 30 above baseline reflecting voltage hysteresis comparator behavior.
Maximal ATC: The therapist has to repeat the movement to be calibrated at least four times. The maximal ATC value produced by the subject is calculated as the median value among the maximum of each repetition. This value limits the index dimension of the array, related to the calibrated channel, inside the FES Current Matrix, highlighted in orange in
Figure 8.
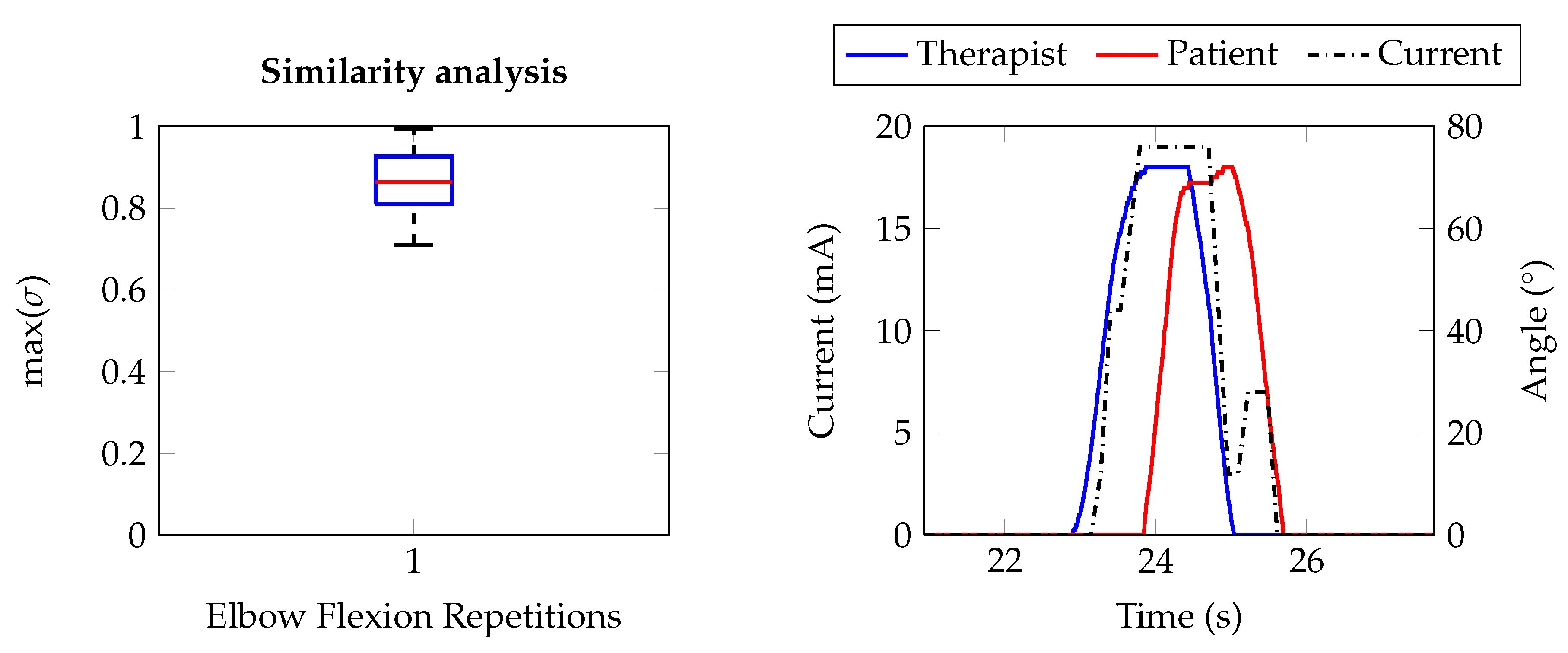
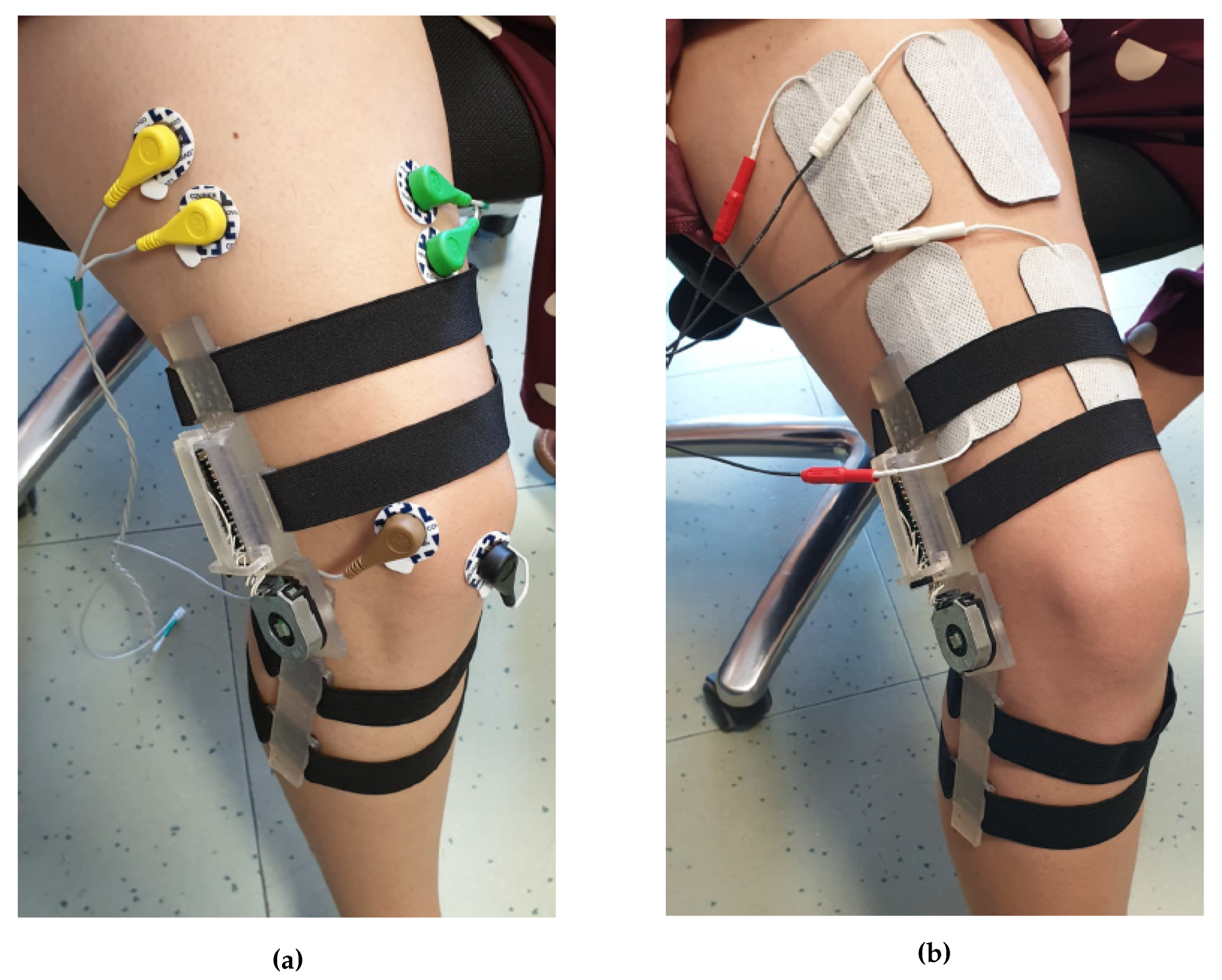
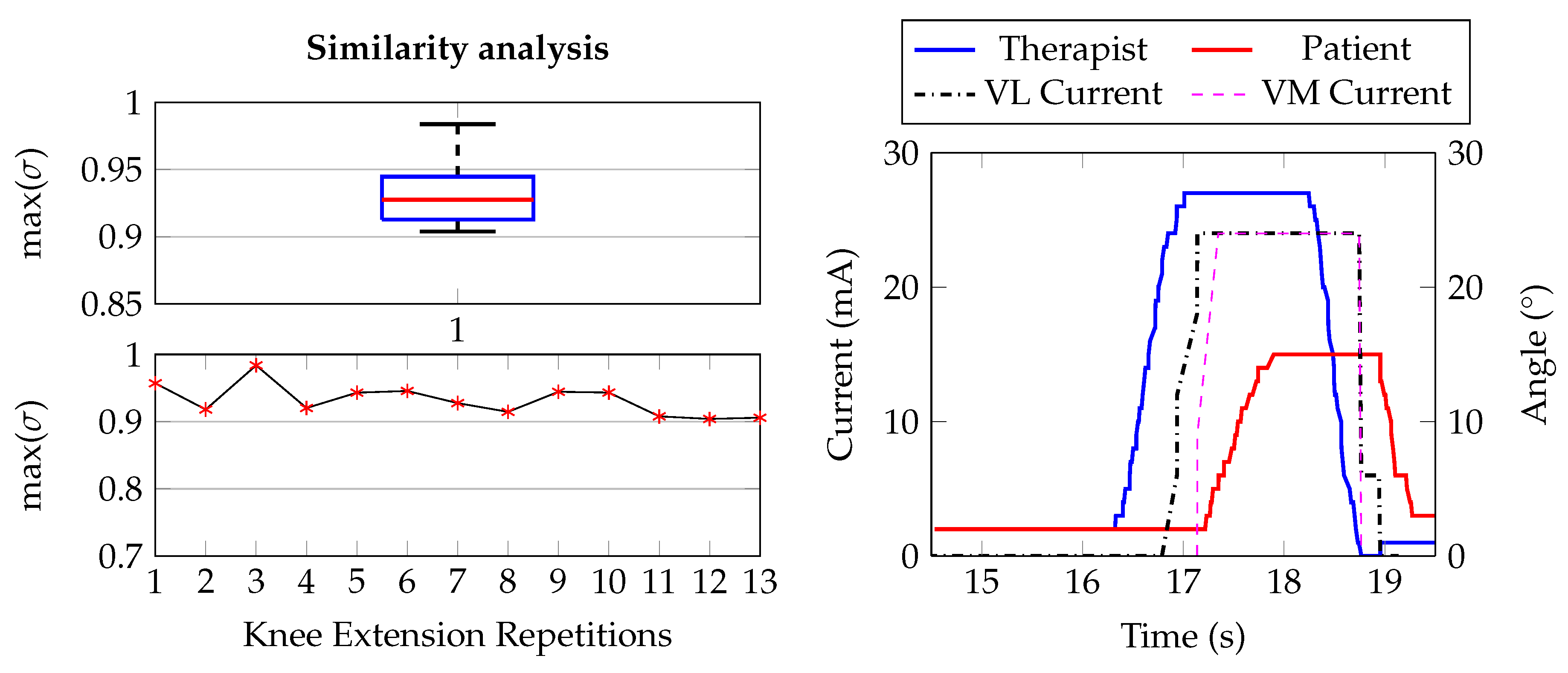
AROM evaluation (optional): The maximal Absolute Range of Motion (AROM) of the involved articulation has been computed by processing the angular data of both therapist and patient. This measure standardizes the FES application and provides a comparison feedback between the voluntary movement and the stimulated one. We defined it as an optional step since the use of the electro-goniometers is not mandatory.
Current limitation: We define the maximal current, useful to properly reproduce the movement, as the 110% of the current able to produce a 30% AROM variation in the stimulated subject. If the goniometer is not used, this step can be visually performed. Maximal Current values, represented in blue in
Figure 8, related to the indexes defined by the Maximal ATC, define the proper stimulation values inter-step.
Following this approach, we are able to set up our structure with a perfect matching between the muscular activation of the therapist and the pulses amplitude to adequately stimulate the patient limb. Looking at the example represented in
Figure 8, the FES Current Matrix has a different column-dimension for each channel defined by the Maximum ATC values. In this way, setting the Maximum current values, we are able to define step and range of pulses amplitude. Concluding, simply controlling the lower values of the stimulation matrix (FES Current Matrix[(:, 1:2)], grey cells), combined with the moving median gate operation, we are able to implement a very low complex but efficient noise-gateway control.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}