Optimization of a Single Tube Practical Acoustic Thermometer


Abstract
:1. Introduction
2. Relation between Temperature and the Speed of Sound
2.1. Free Field Model of the Speed of Sound
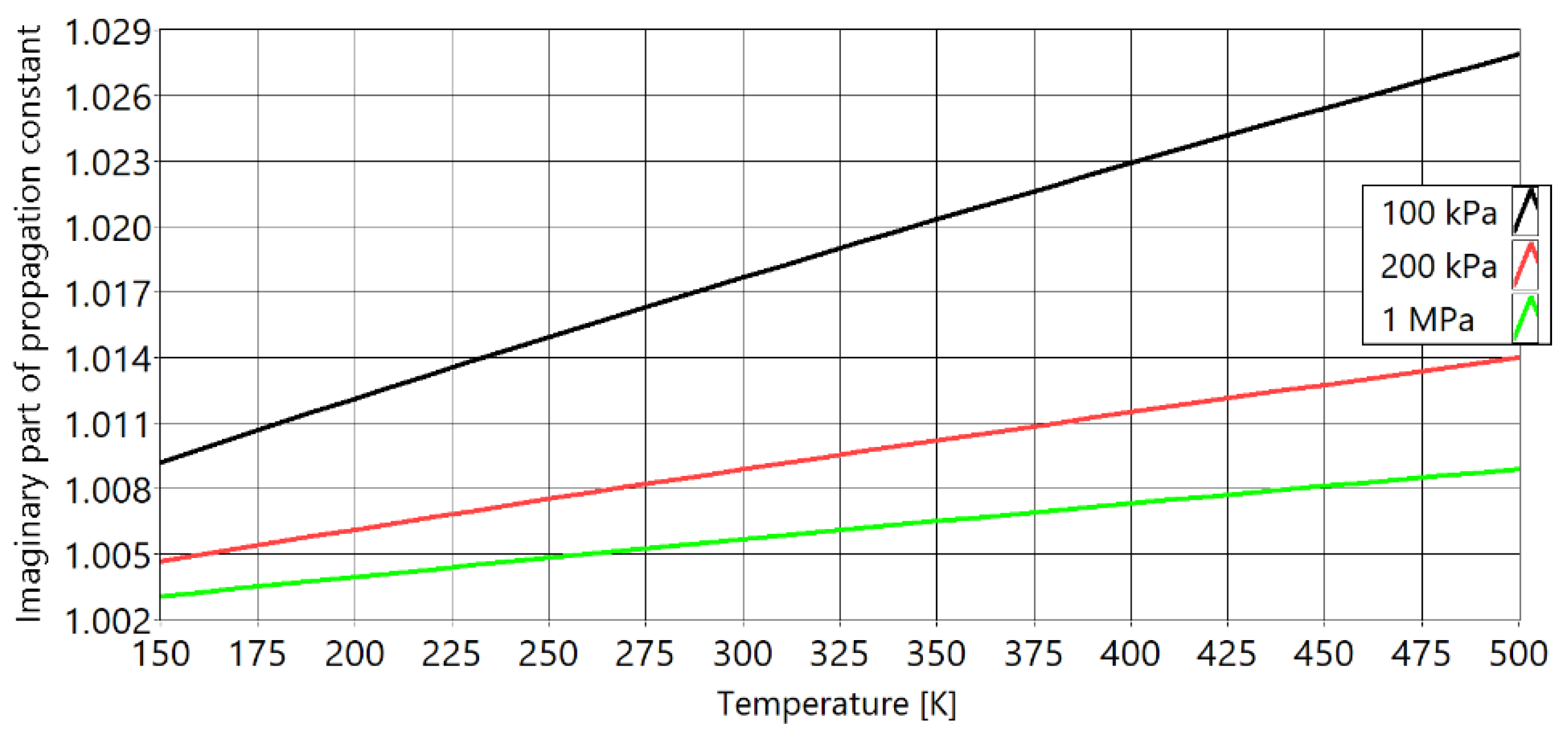
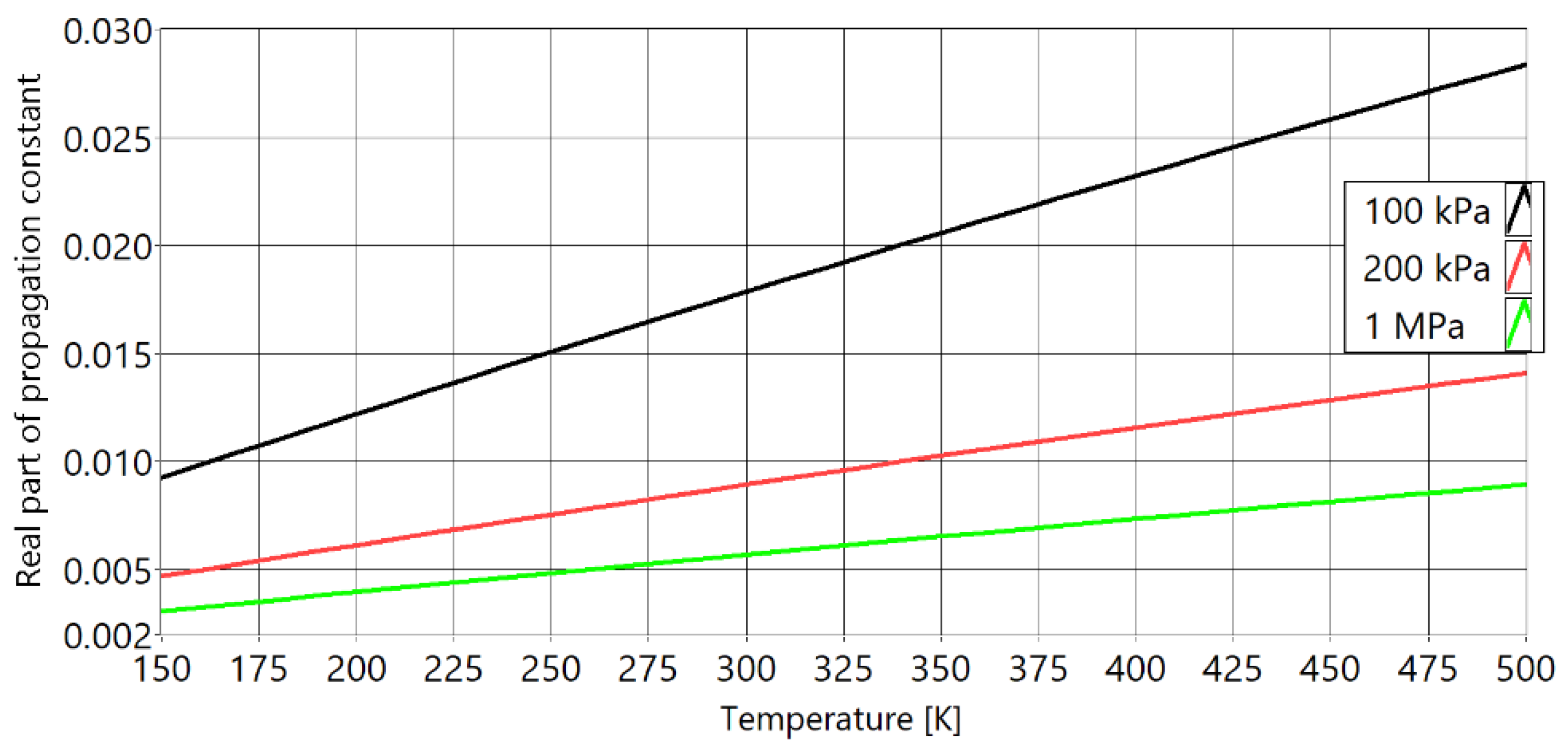
2.2. Complete Model of the Speed of Sound in Tubes
2.3. Simplified Model of the Speed of Sound in Tubes
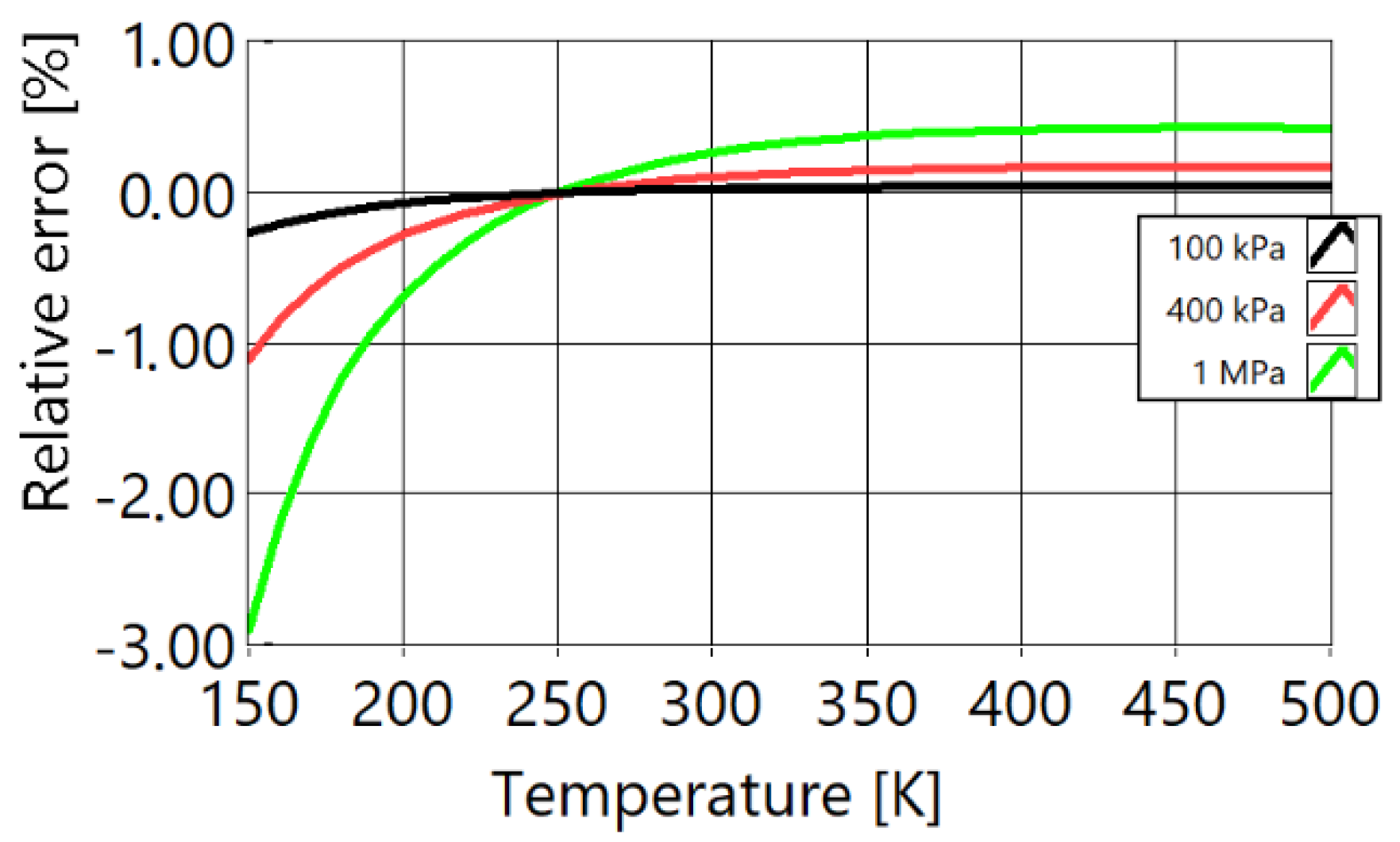
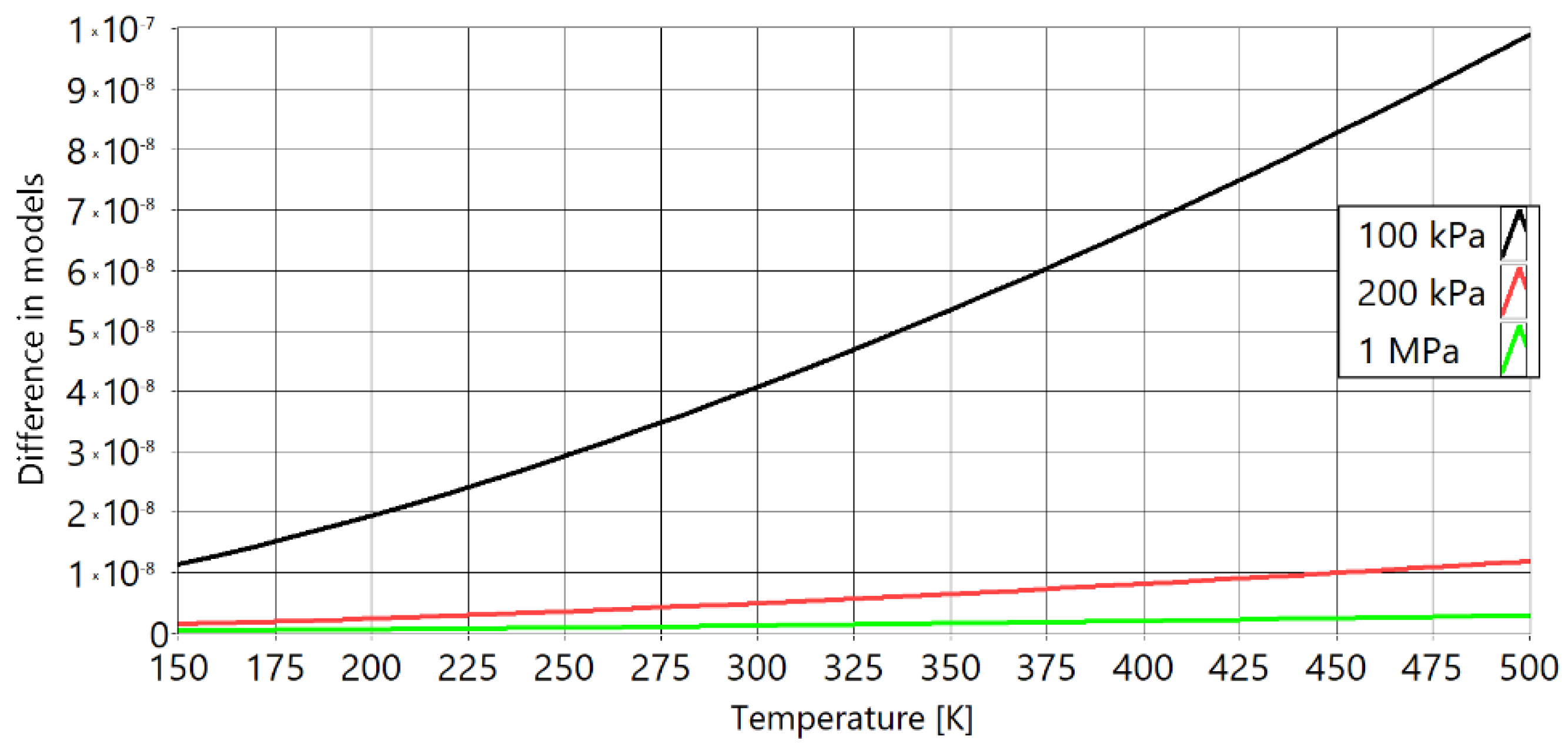
2.4. Comparison of Speed of Sound Models
3. Materials and Methods
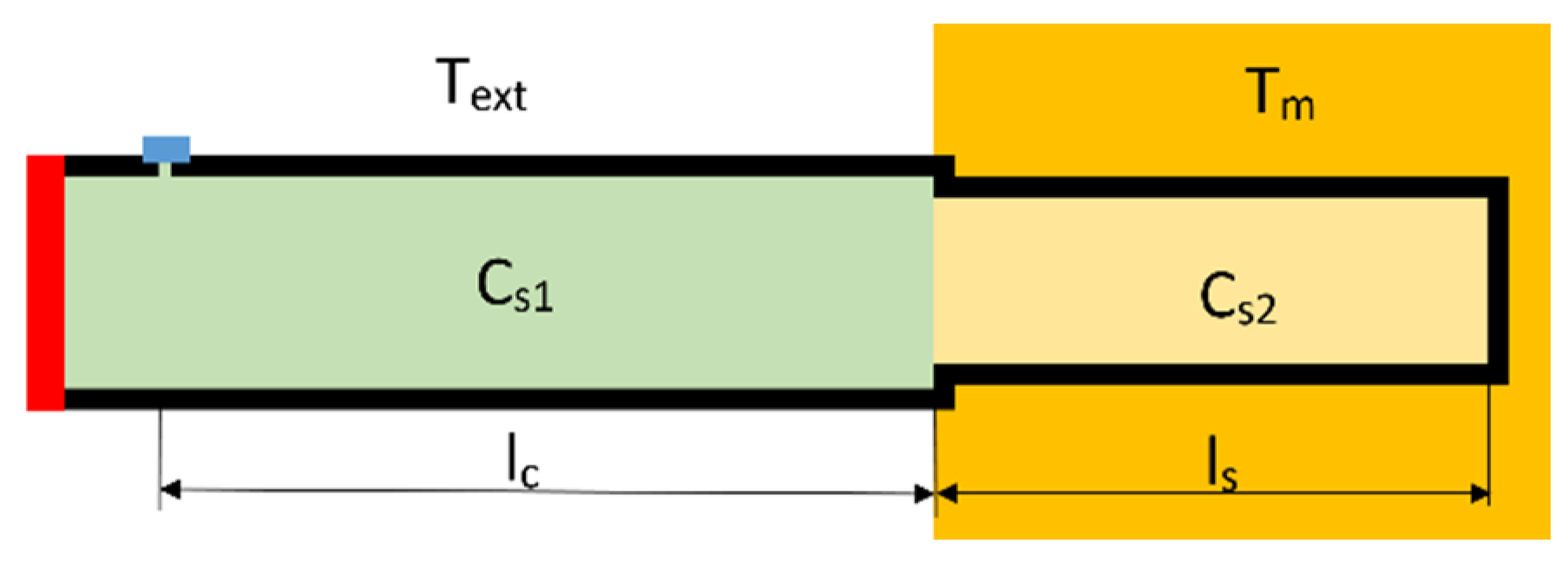
3.1. PAT Housing
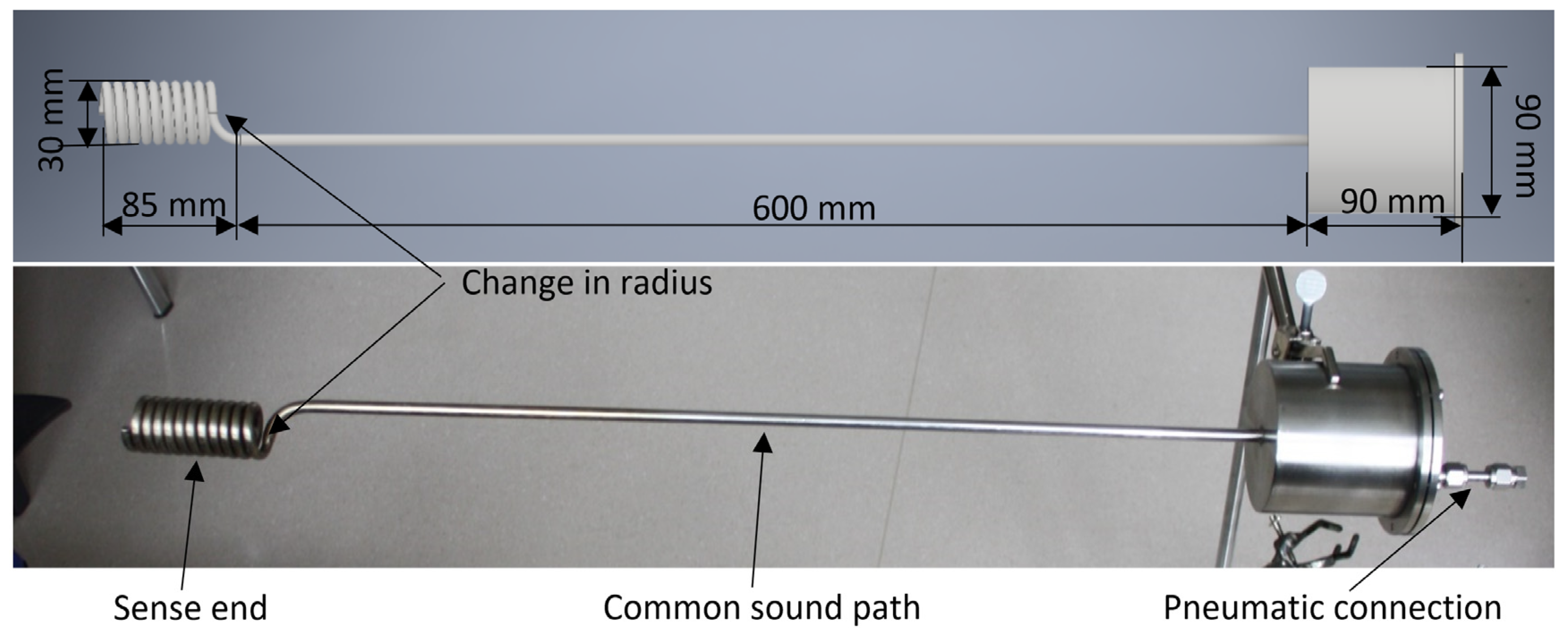
3.2. Acoustic Connector
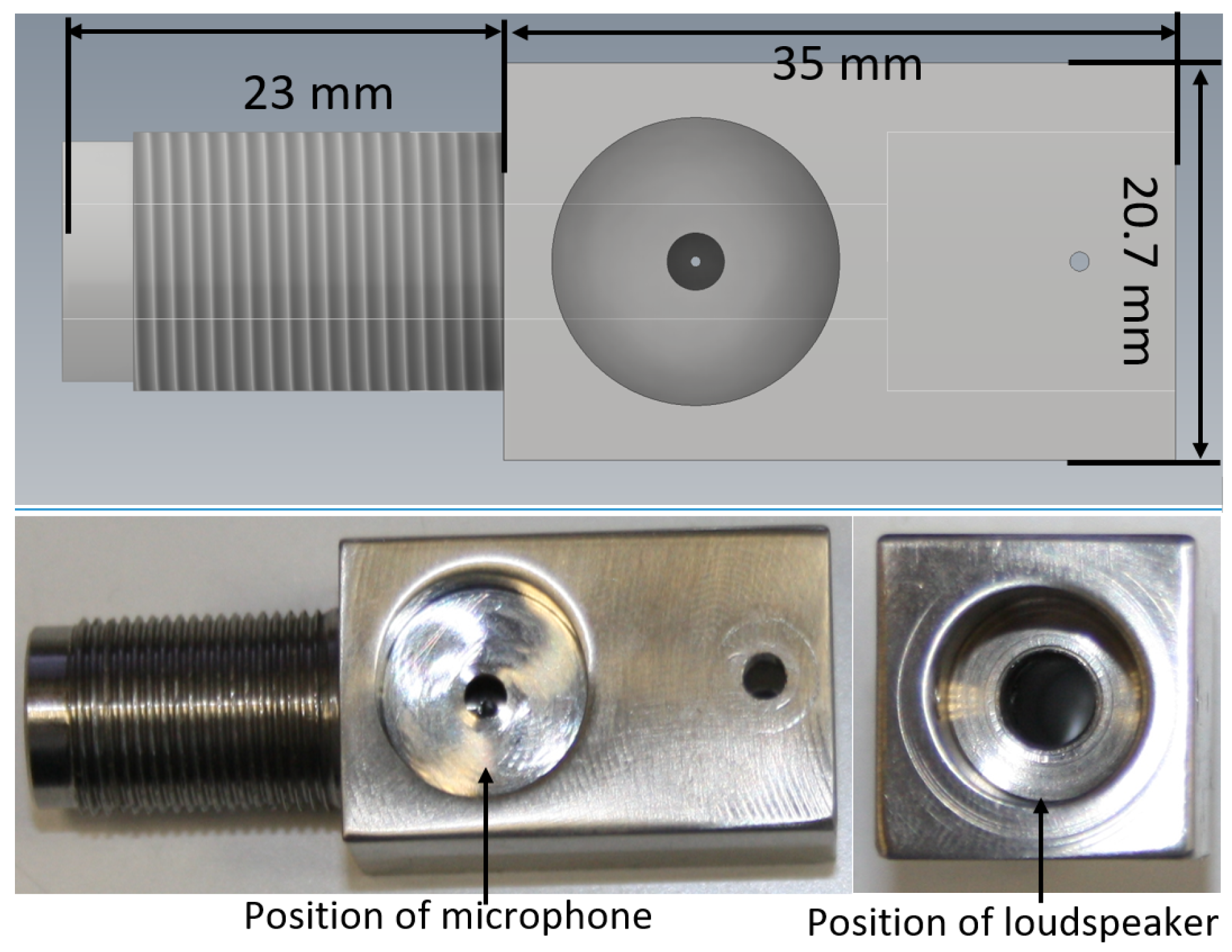
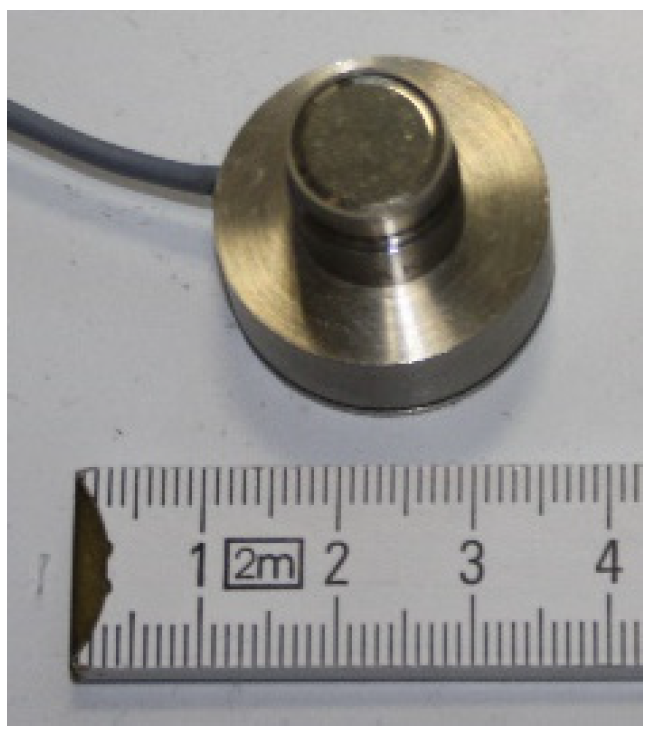
3.3. Microphone and Loudspeaker
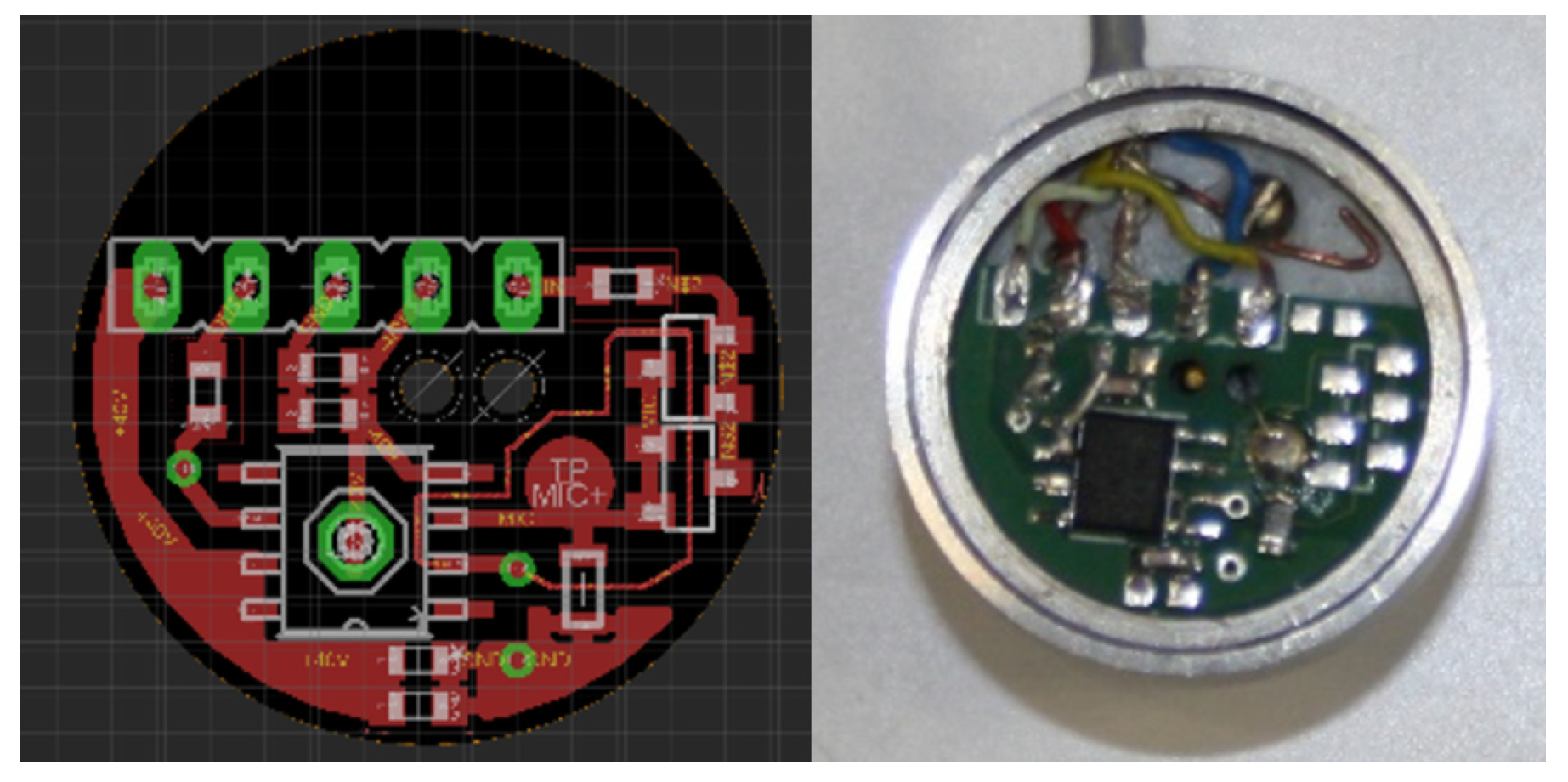
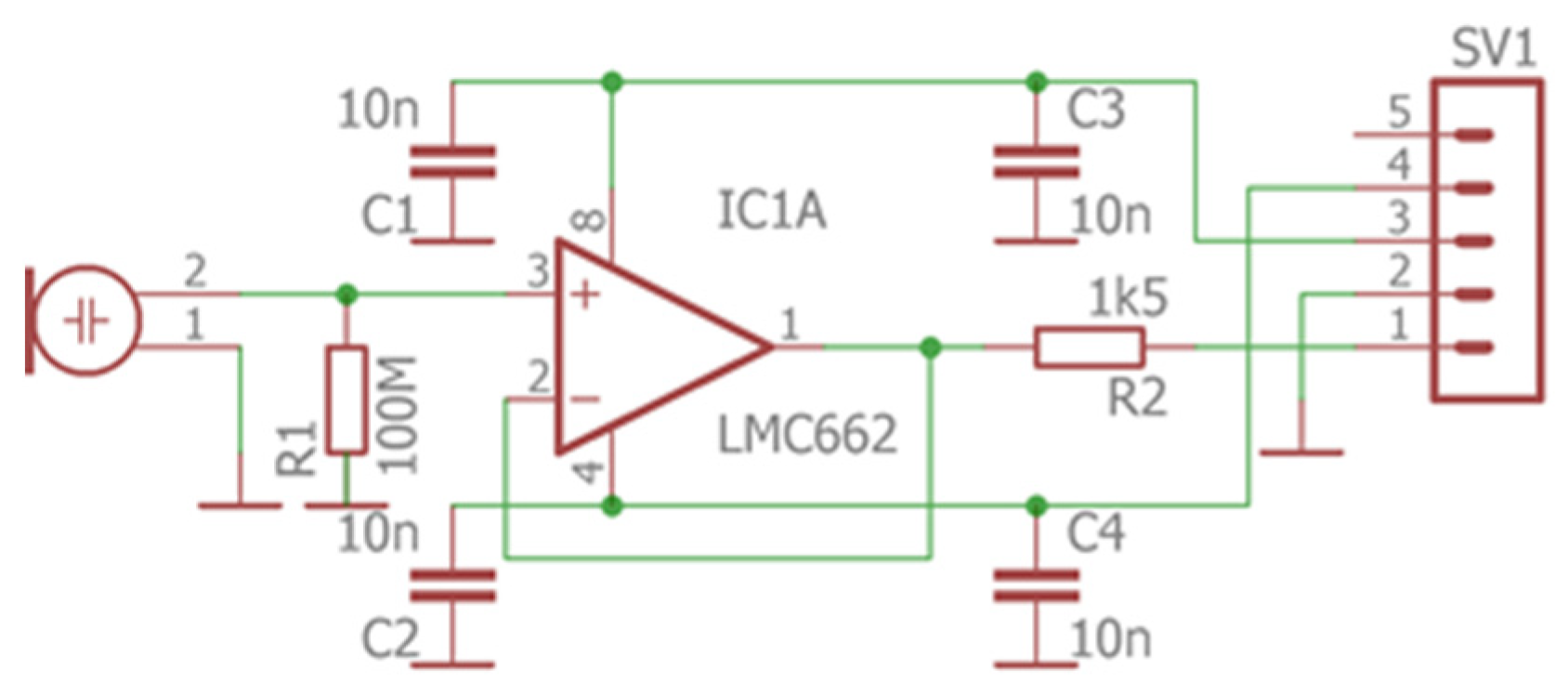
3.4. Electronic Circuits
3.5. Pressure Measurement
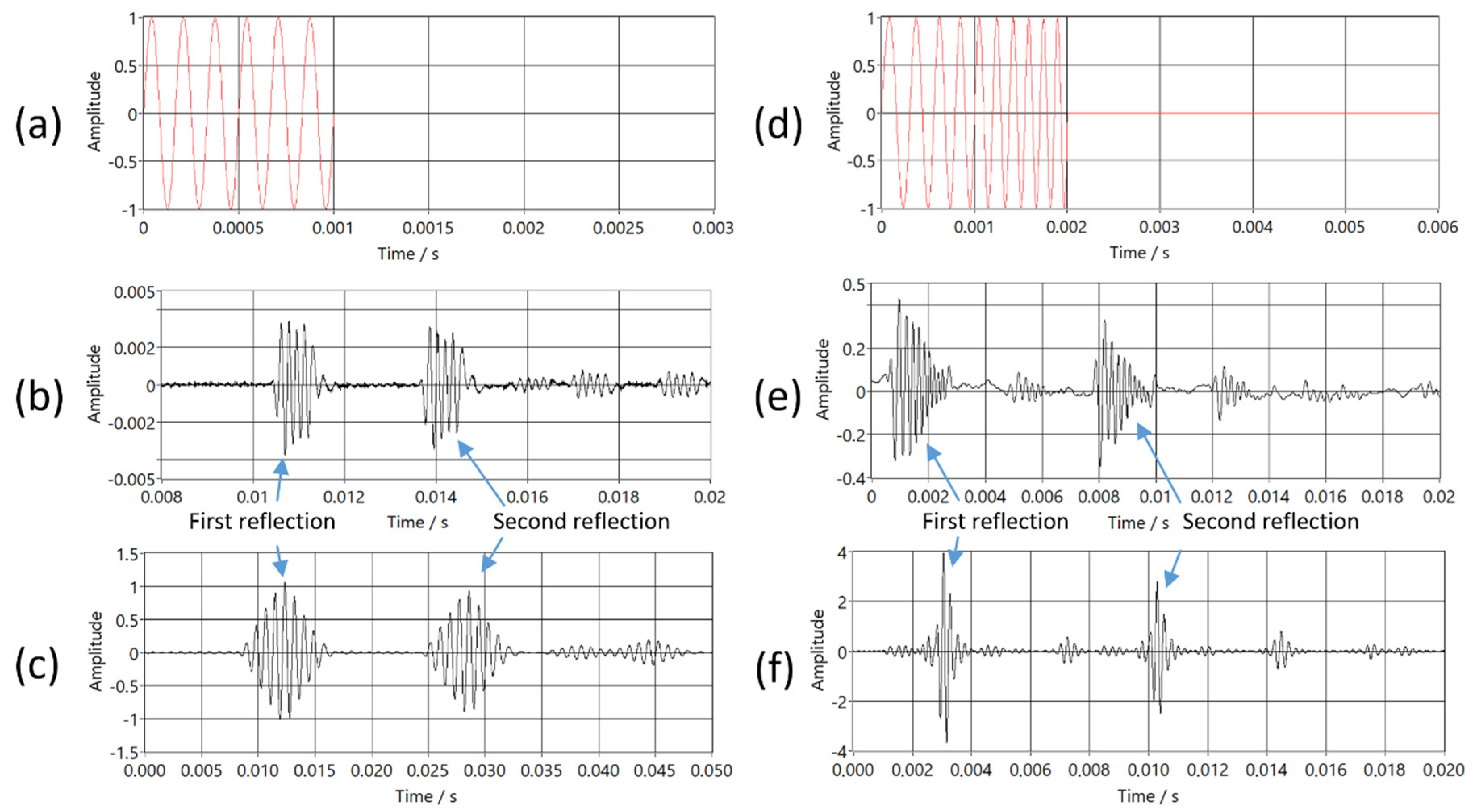
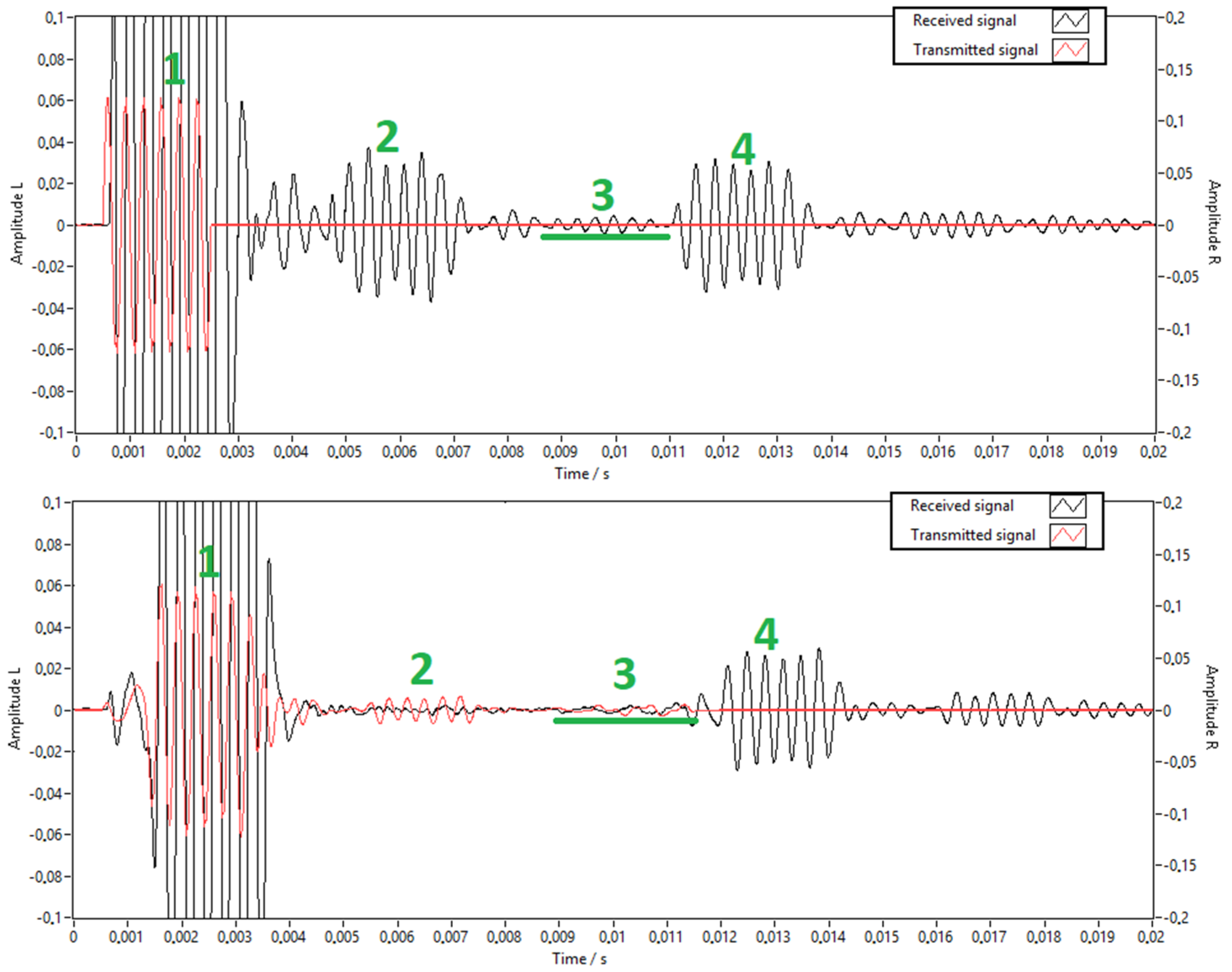
3.6. Signal Shape
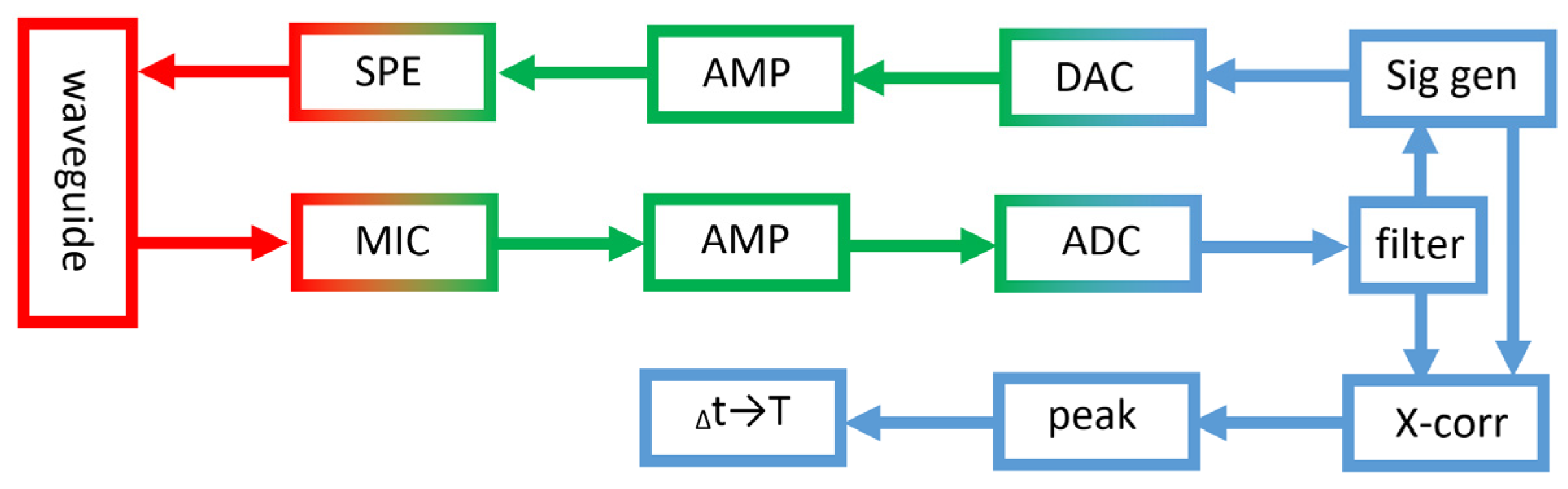
3.7. PAT Block Diagram
4. Uncertainty Analysis
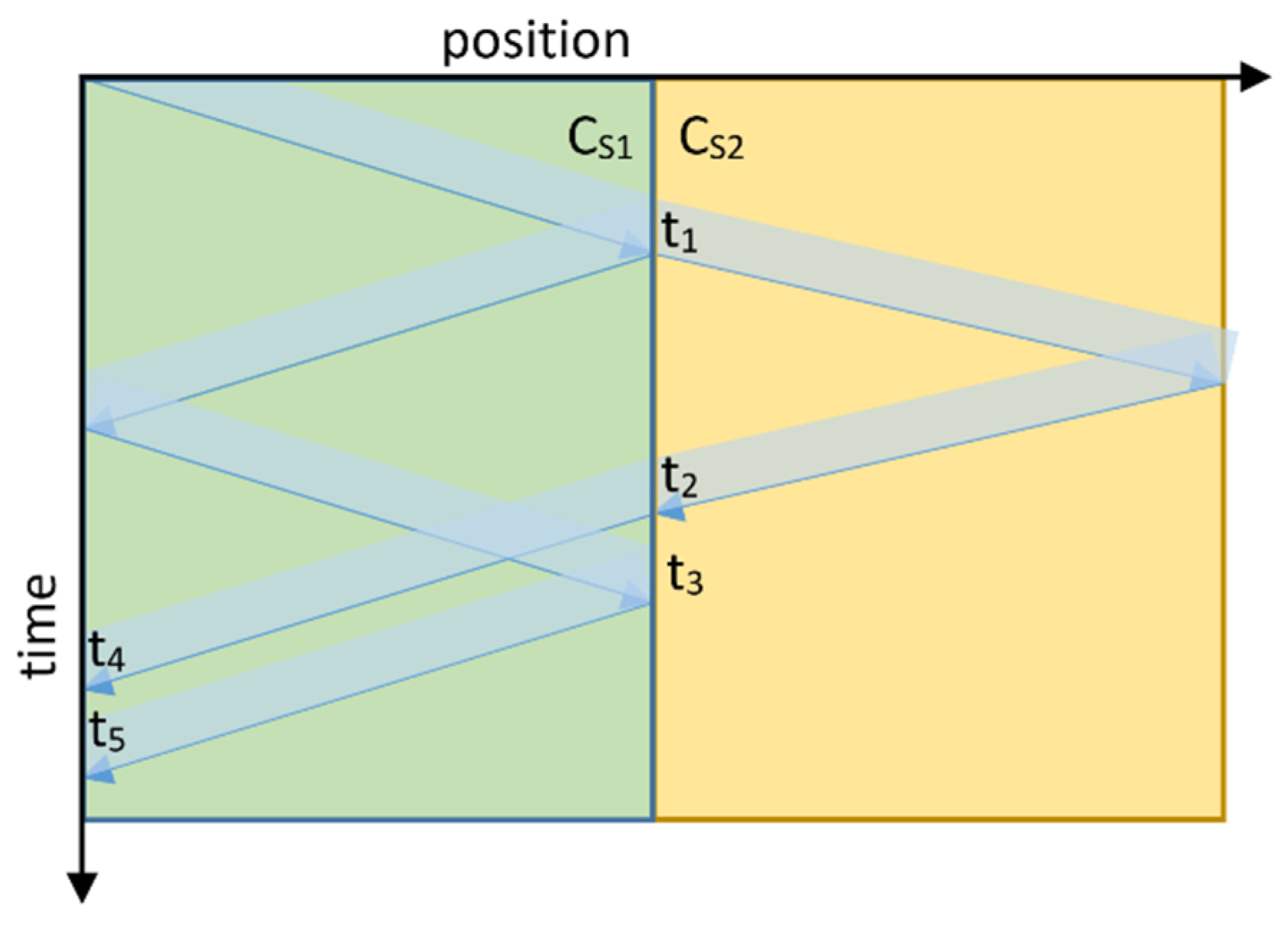
5. The Acoustic Signal Overlap Problem
Calculating the Optimal Tube Lengths for the Single Tube PAT Design
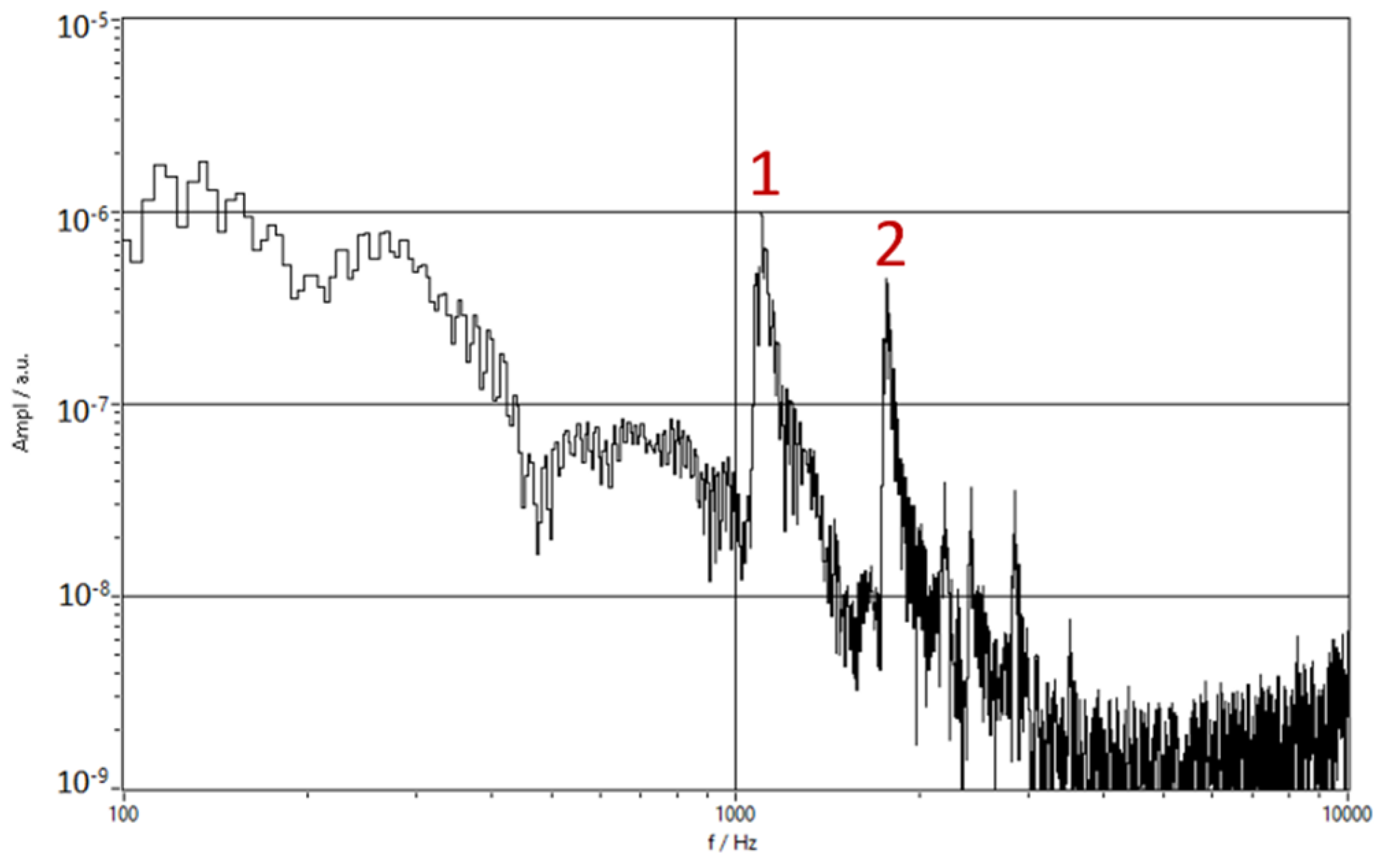
6. Measuring Time Delay with a Frequency Modulated Continuous Wave Acoustic Signal (CWFM)
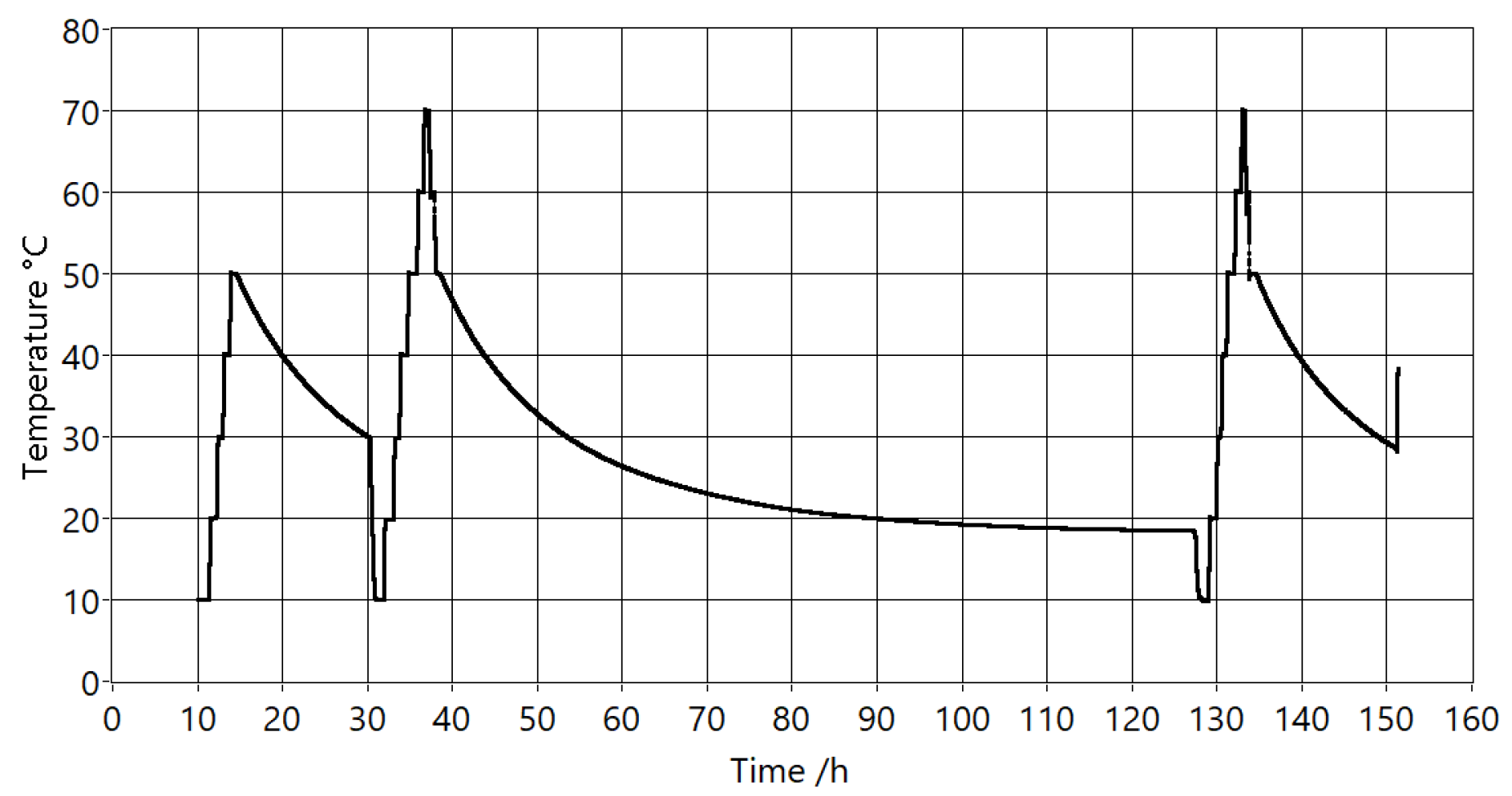
7. Experimental Setup
8. Results and Discussion
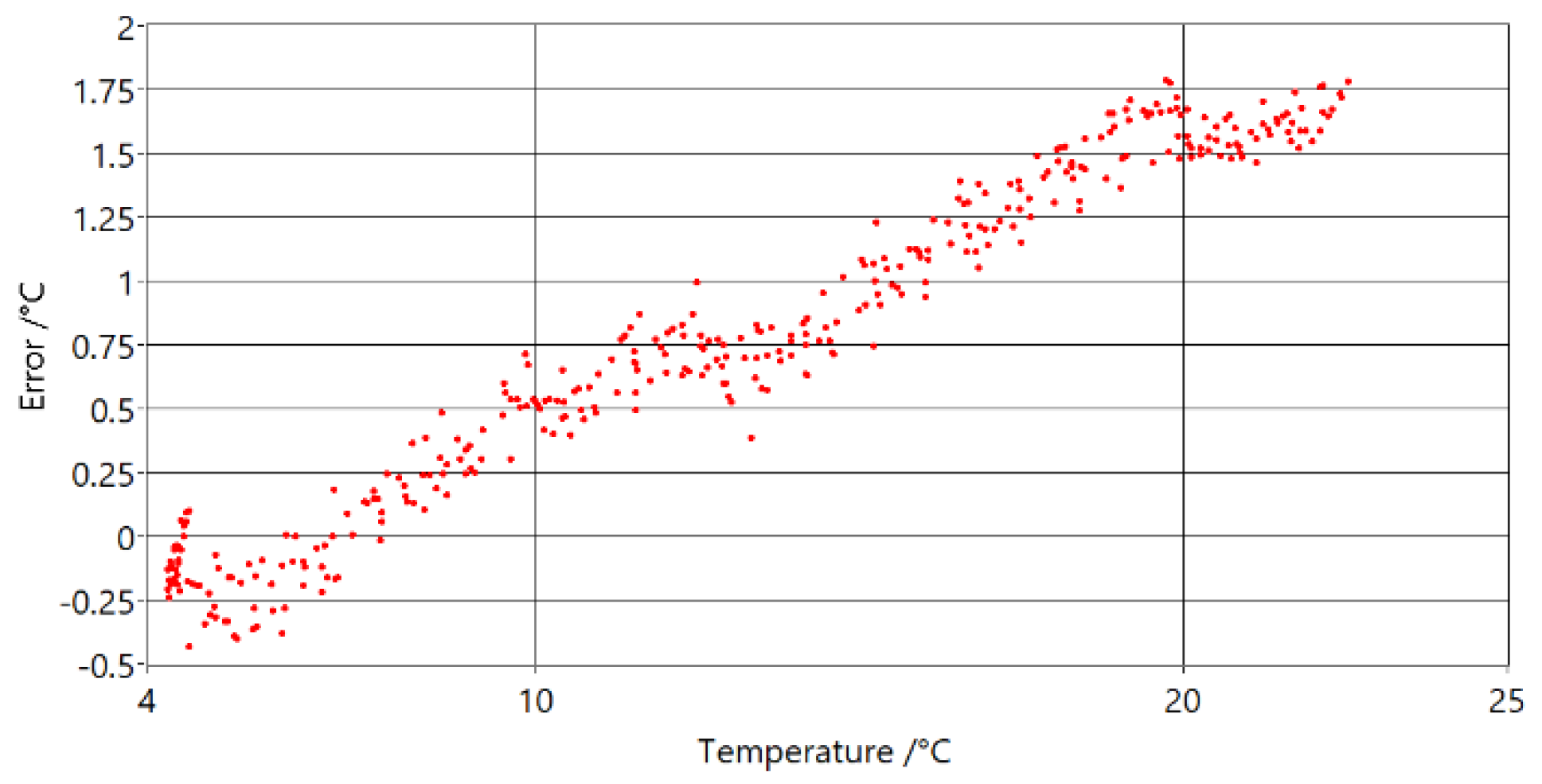
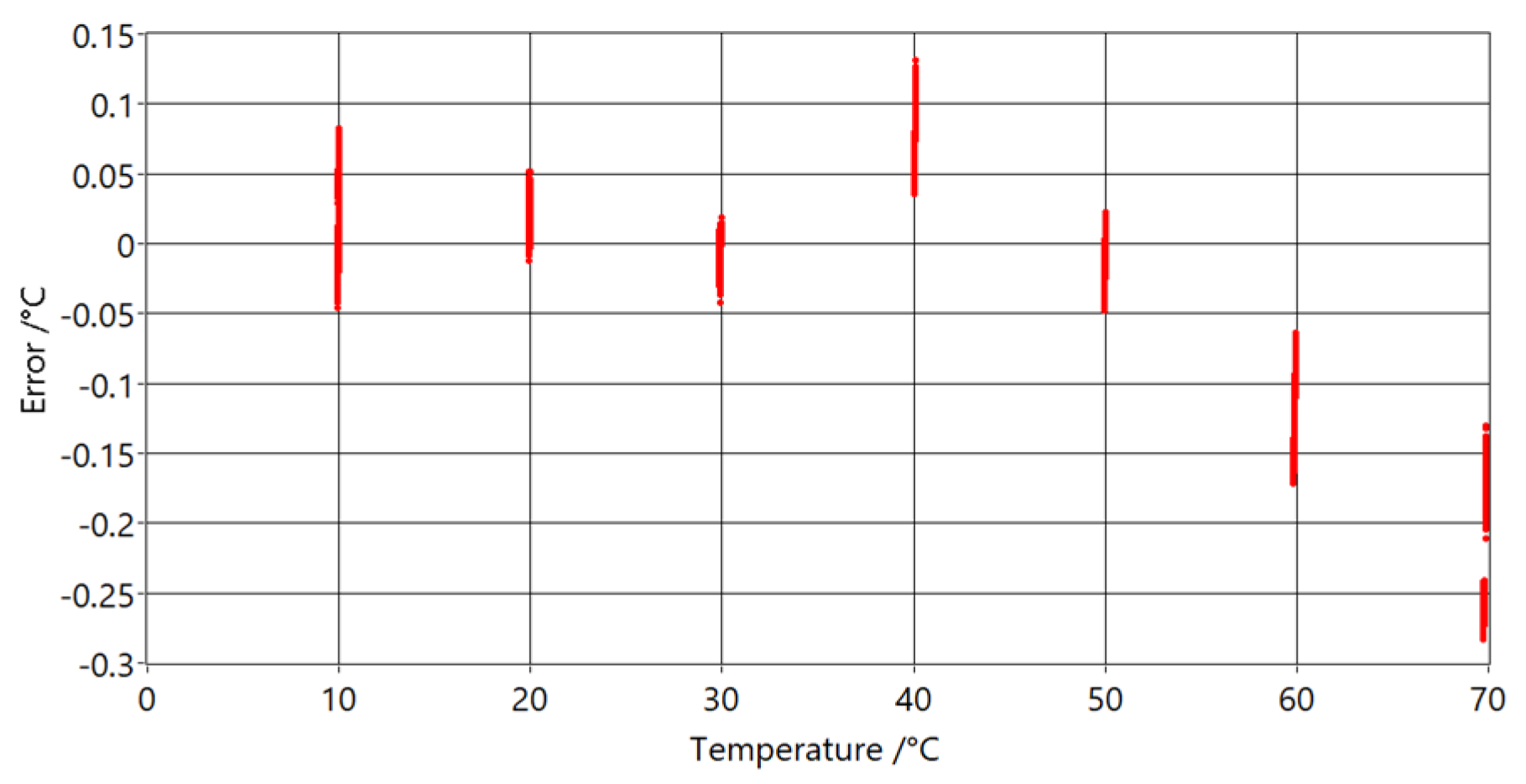
8.1. Results of the PAT with Acoustic Signal Cancellation
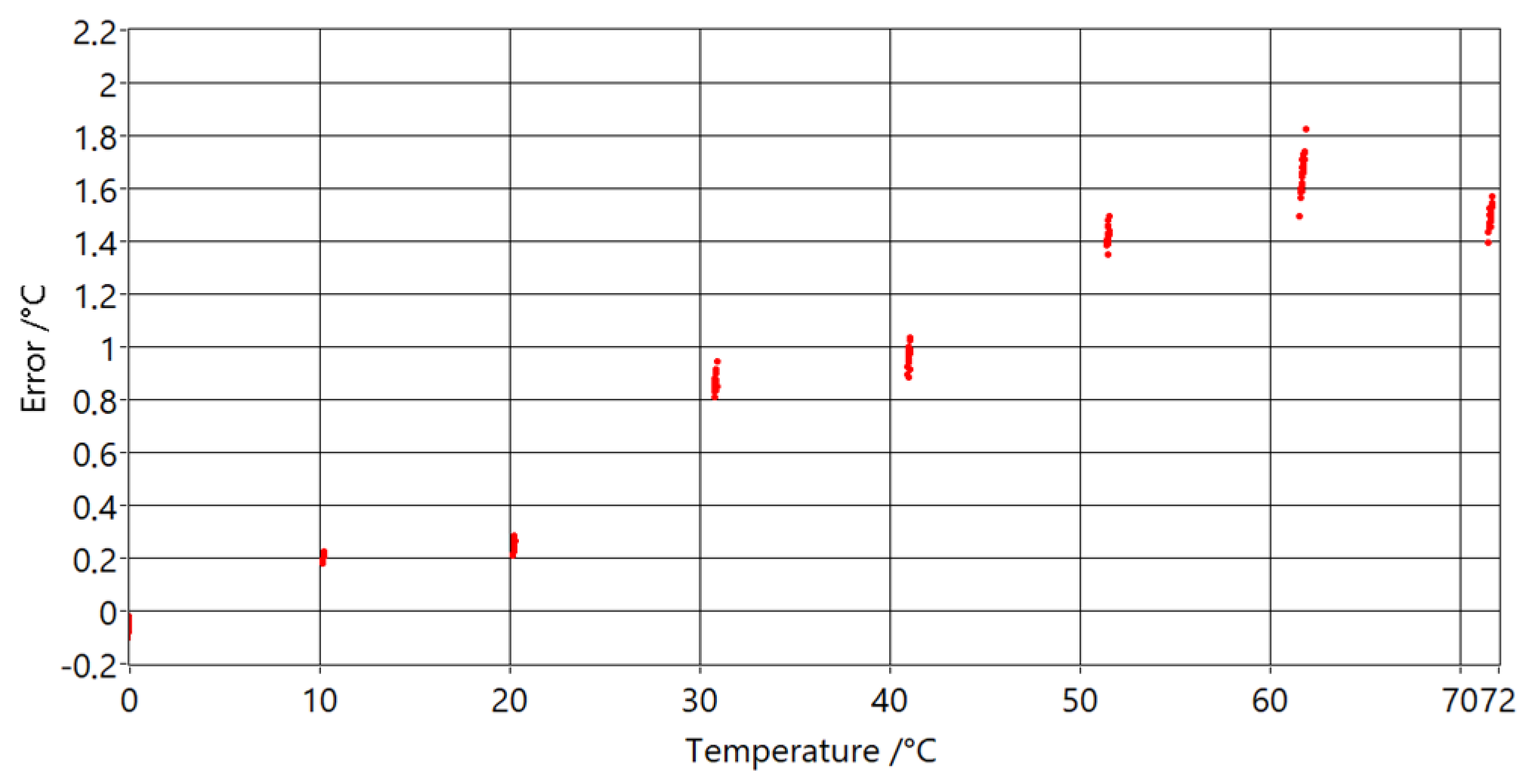
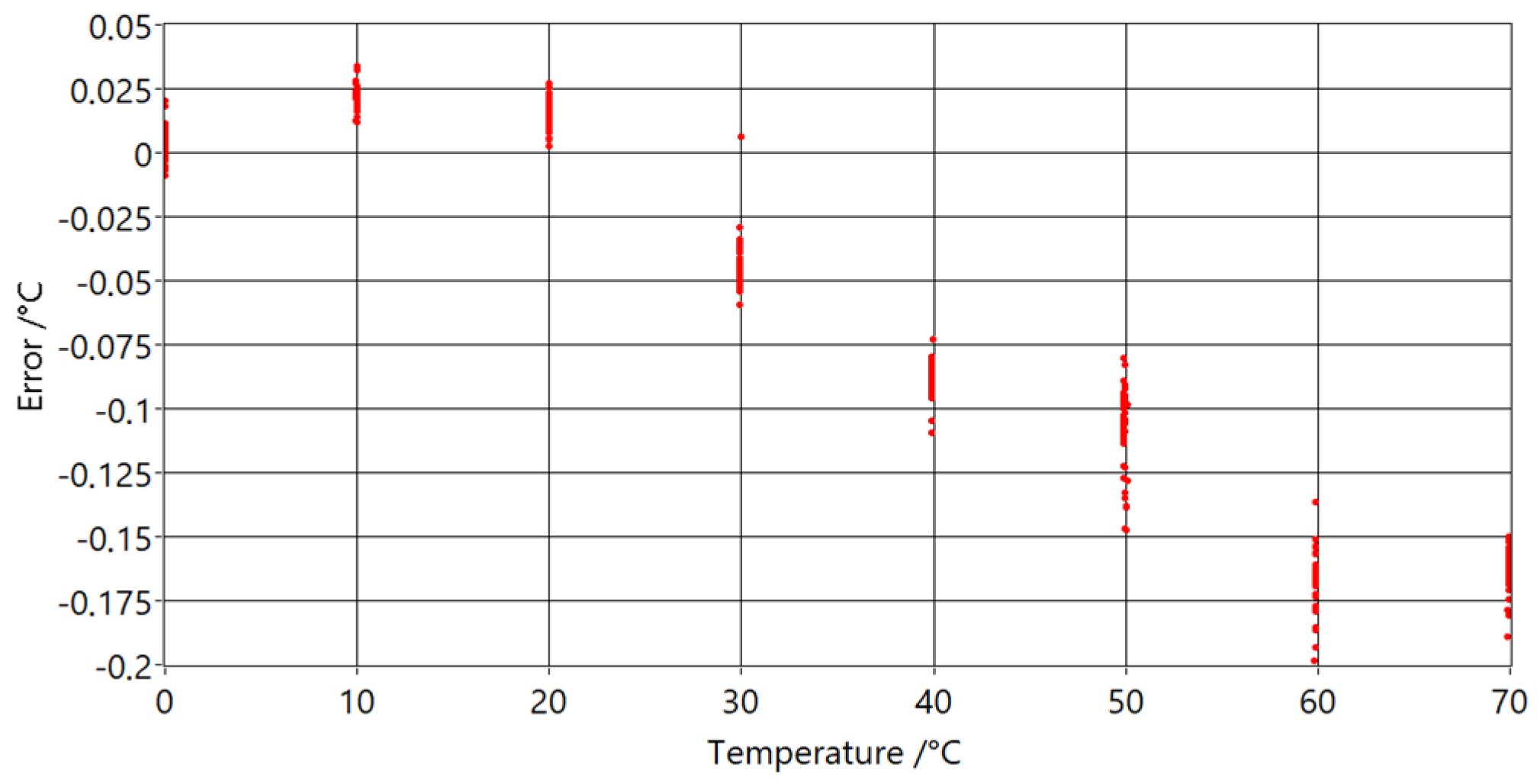
8.2. Results of the PAT with Optimal Waveguide Lengths
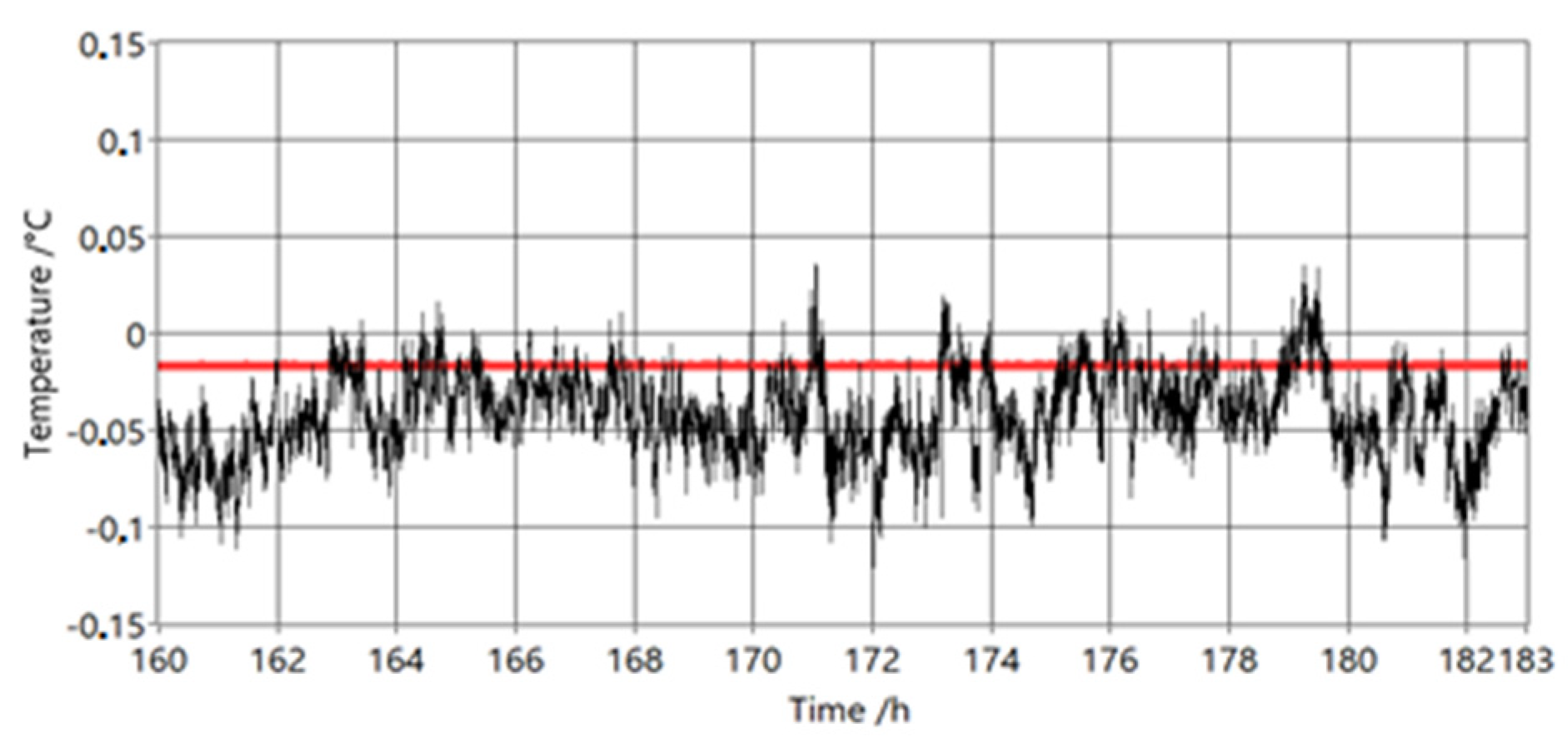
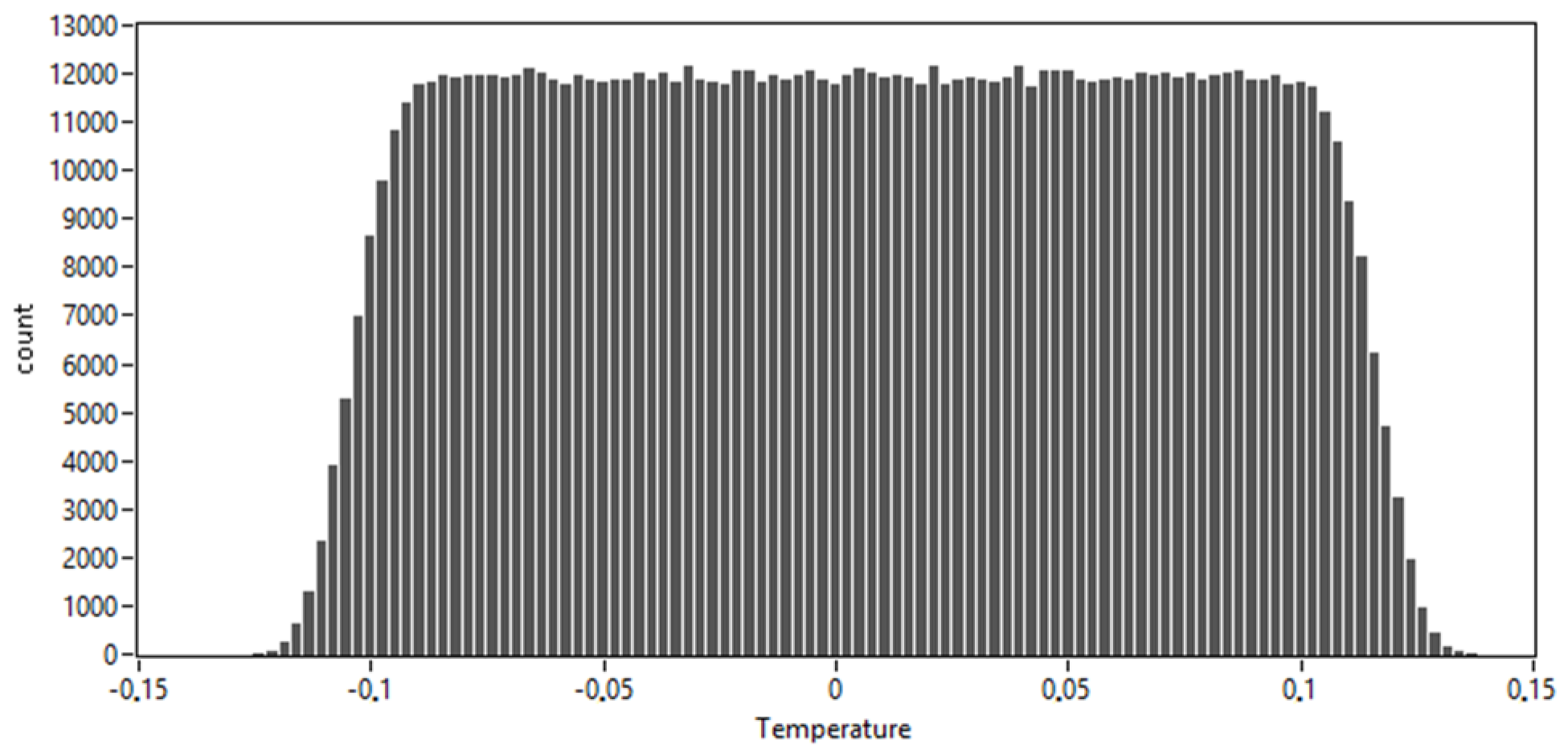
8.3. Results of the Monte Carlo Simulation
9. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Fellmuth, B.; Gaiser, C.; Fischer, J. Determination of the Boltzmann constant. Meas. Sci. Technol. 2006, 17, 145–160. [Google Scholar] [CrossRef]
- Roes, J.B.; Peat, D.L. The Development of an Acoustical Thermometer for a Graphite Matrix Nuclear Fuel Element. IEEE Trans. Nucl. Sci. 1967, 14, 348–359. [Google Scholar] [CrossRef] [Green Version]
- Mi, X.; Zhang, S.; Zhang, J.; Yang, Y. Automatic ultrasonic thermometry. J. Nanjing Univ. Nat. Sci. Ed. 2003, 39, 517–524. [Google Scholar]
- Jaremkiewicz, M.; Taler, D.; Dzierwa, P.; Taler, J. Determination of Transient Fluid Temperature and Thermal Stresses in Pressure Thick-Walled Elements Using a New Design Thermometer. Energies 2019, 12, 222. [Google Scholar] [CrossRef] [Green Version]
- Olabode, O.F.; Fletcher, S.; Longstaff, A.P.; Mian, N.S. Precision Core Temperature Measurement of Metals Using an Ultrasonic Phase-Shift Method. J. Manuf. Mater. Process. 2019, 3, 80. [Google Scholar] [CrossRef] [Green Version]
- Underwood, R.; Gardiner, T.; Finlayson, A.; Few, J.; Wilkinson, J.; Bell, S.; Merrison, J.; Iverson, J.J.; De Podesta, M. A combined non-contact acoustic thermometer and infrared hygrometer for atmospheric measurements. Meteorol. Appl. 2015, 22, 830–835. [Google Scholar] [CrossRef] [Green Version]
- Underwood, R.; Gardiner, T.; Finlayson, A.; Bell, S.; De Podesta, M. An improved non-contact thermometer and hygrometer with rapid response. Metrologia 2017, 54, S9–S15. [Google Scholar] [CrossRef]
- Apfel, J.H. Acoustic Thermometry. Rev. Sci. Instrum. 1962, 33, 428–430. [Google Scholar] [CrossRef]
- Aulfes, H.J. Akustisches Gasthermometer mit Dünnen Sensorrohren; University-GH Paderborn: Paderborn, Germany, 1993. [Google Scholar]
- De Podesta, M.; Sutton, G.; Underwood, R.; Legg, S.; Steinitz, A. Practical Acoustic Thermometry with Acoustic Waveguides. Int. J. Thermophys. 2010, 31, 1554–1566. [Google Scholar] [CrossRef]
- Sutton, G.; Edwards, G.; Veltcheva, R.; De Podesta, M. Twin-tube practical acoustic thermometry: Theory and measurements up to 1000 °C. Meas. Sci. Technol. 2015, 26, 085901. [Google Scholar] [CrossRef]
- Zucker, R.D.; Biblarz, O. Fundamentals of Gas Dynamics; John Wiley & Sons: Hoboken, NJ, USA, 2002. [Google Scholar]
- Bailey, R.T.; Bernegger, S.; Bicanic, D.; Bijnen, F.; Blom, C.; Cruickshank, F.; Diebold, G.; Fiedler, M.; Harren, F.; Hess, P.; et al. Photoacoustic, Photothermal and Photochemical Processes in Gases; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012; Volume 46. [Google Scholar]
- Tavcar, R.; Agrez, D.; Begus, S. Evaluation of pressure effects on acoustic thermometer with a single waveguide. Acta Imeko 2018, 7, 42–47. [Google Scholar] [CrossRef]
- Augustin, S.; Fröhlich, T. Temperature Dependence of the Dynamic Parameters of Contact Thermometers. Sensors 2019, 19, 2299. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Strutt, J.W.; Rayleigh, B. The Theory of Sound; Dover: Mineola, NY, USA, 1945. [Google Scholar]
- Kinsler, L.E.; Frey, A.R.; Coppens, A.B.; Sanders, J.V. Fundamentals of Acoustics, 4th ed.; Wiley-VCH: Weinheim, Germany, 1999; p. 560. ISBN 0-471-84789-5. [Google Scholar]
- Tijdeman, H. On the propagation of sound waves in cylindrical tubes. J. Sound Vib. 1975, 39, 1–33. [Google Scholar] [CrossRef]
- Yazaki, T.; Tashiro, Y.; Biwa, T. Measurements of sound propagation in narrow tubes. Proc. R. Soc. A: Math. Phys. Eng. Sci. 2007, 463, 2855–2862. [Google Scholar] [CrossRef]
- Iso, I.; Oiml, B. Guide to the Expression of Uncertainty in Measurement; IEC: Geneva, Switzerland, 1995; Volume 122. [Google Scholar]
- Tavcar, R.; Agrez, D.; Begus, S. Acoustic thermometer with single waveguide. In Proceedings of the 22nd IMEKO TC4 International Symposium & 20th International Workshop on ADC Modelling and Testing: Supporting World Development through Electrical and Electronic Measurements, Iasi, Romania, 14–15 September 2017; pp. 244–248. [Google Scholar]
- Wang, Y.; Fan, Y.; Qin, S.; Chang, D.; Shao, X.; Mu, H.; Zhang, G. Arrival time estimation methodology for partial discharge acoustic signals in power transformers based on a double-threshold technique. Meas. Sci. Technol. 2018, 30, 025001. [Google Scholar] [CrossRef]
- Stove, A.G. Linear FMCW radar techniques. In IEE Proceedings F (Radar and Signal Processing); IET: London, UK, 1992; Volume 139, pp. 343–350. [Google Scholar]
- Luck, D.G.C. Frequency Modulated Radar; McGraw-Hill: New York, NY, USA, 1949. [Google Scholar]
- Preston-Thomas, H. The International Temperature Scale of 1990 (ITS-90). Metrologia 1990, 27, 3–10. [Google Scholar] [CrossRef]
- National Institute of Standards and Technology. NIST Chemistry Webbook: NIST Standard Reference Database Number 69; NIST: Gaithersburg, MD, USA, 2000.
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters With Rectangular Probability Distribution | ||
|---|---|---|
| Expectation | Semi-Width | |
| Heat capacity cp | 21.03 J∙mol−1∙K−1 | 0.06 J∙mol−1∙K−1 |
| Dynamic viscosity | 21.1 µPa∙s | 0.4 µPa∙s |
| Thermal conductivity | 16.6 mW∙m−1∙K−1 | 0.3 mW∙m−1∙K−1 |
| Speed of sound | 307.979 m∙s−1 | 0.061 m∙s−1 |
| Heat capacity cv | 12.51 J∙mol−1∙K−1 | 0.03 J∙mol−1∙K−1 |
| Thermal linear expansion | −0.03% | 0.15% |
| Parameters with normal probability distribution | ||
| Expectation | STD | |
| Sound delay | 0.006163 s | 22 ns |
| Pressure | 400000 Pa | 3 Pa |
| Temperature | Standard Deviation | |
|---|---|---|
| Gated sinewave | Chirps | |
| 10 °C | 5.6 mK (60 ns) | 9.3 mK (98 ns) |
| 30 °C | 8.7 mK (83 ns) | 14 mK (133 ns) |
| 70 °C | 7.9 mK (62 ns) | 8.5 mK (67 ns) |
| Parameter | Sensitivity Coefficient | Uncertainty Contribution |
|---|---|---|
| Heat capacity cp | 0.026 K/J∙mol−1∙K−1 | 0.9 mK |
| Dynamic viscosity | 0.005 K/µPa∙s | 1.1 mK |
| Thermal conductivity | 0.006 K/mW∙m−1∙K−1 | 1.0 mK |
| Speed of sound | 1.648 K/m∙s−1 | 58.1 mK |
| Heat capacity cv | 0.058 K/J∙mol−1∙K−1 | 1.0 mK |
| Thermal linear expansion | 0.013 K/% | 1.1 mK |
| Sound delay | 0.045 K/µs | 1.0 mK |
| Pressure | 0.3 mK/Pa | 0.9 mK |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tavčar, R.; Drnovšek, J.; Bojkovski, J.; Beguš, S. Optimization of a Single Tube Practical Acoustic Thermometer. Sensors 2020, 20, 1529. https://doi.org/10.3390/s20051529
Tavčar R, Drnovšek J, Bojkovski J, Beguš S. Optimization of a Single Tube Practical Acoustic Thermometer. Sensors. 2020; 20(5):1529. https://doi.org/10.3390/s20051529
Chicago/Turabian StyleTavčar, Rok, Janko Drnovšek, Jovan Bojkovski, and Samo Beguš. 2020. "Optimization of a Single Tube Practical Acoustic Thermometer" Sensors 20, no. 5: 1529. https://doi.org/10.3390/s20051529