Multiuser Chirp Spread Spectrum Transmission in an Underwater Acoustic Channel Applied to an AUV Fleet †


Abstract
:1. Introduction
2. Multiuser Transmission
2.1. System Model
Transmitted Signal
2.2. Underwater Multiuser Channel
User Decoding
2.3. Conventional Multiuser Transmission Schemes
2.3.1. CDMA
2.3.2. TDMA
3. MU-CSS Scheme
3.1. Generalities
3.2. MU-CSS Gram–Schmidt Iterated
3.3. MU-CSS Gram–Schmidt Multiplication
3.4. MU-CSS Gram–Schmidt Insertion
4. Simulation Results
4.1. Underwater Acoustic Channel Simulator
4.2. System Parameters
4.3. Orthogonality Verification
4.4. Performance Metrics
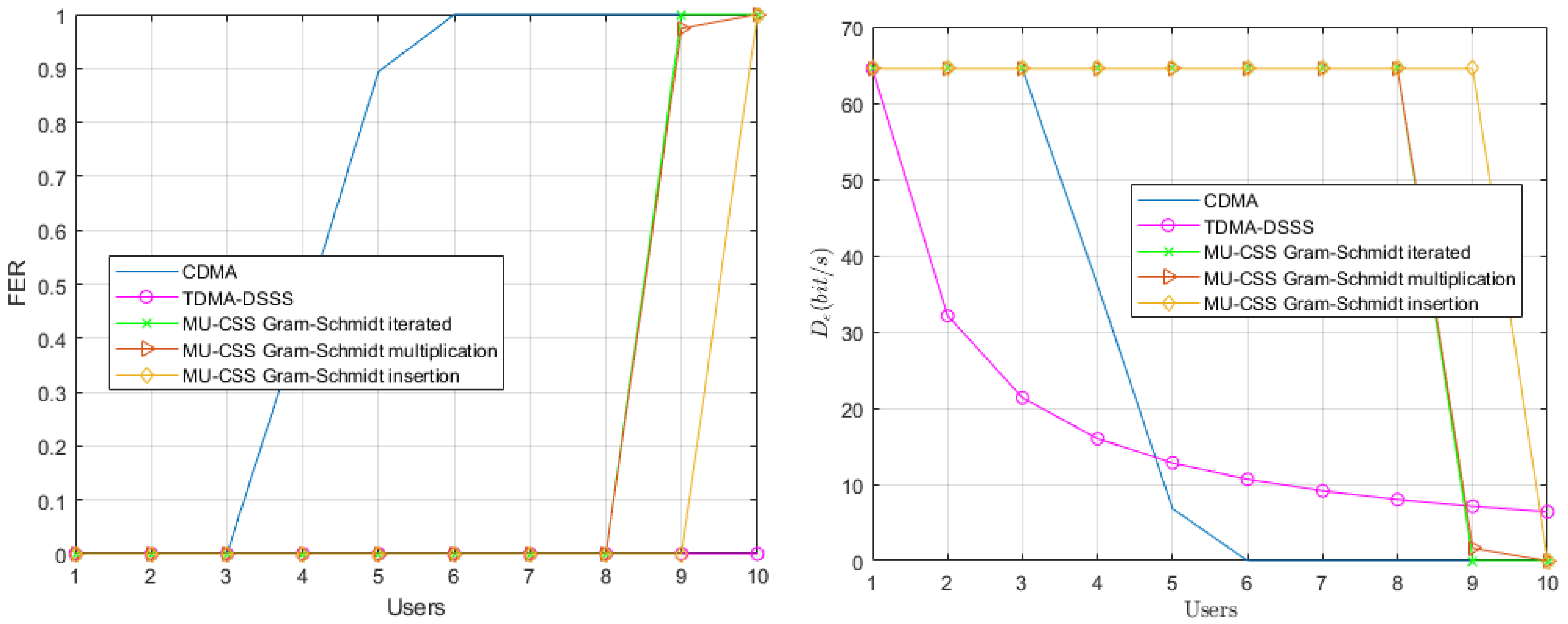
4.5. Static Channel
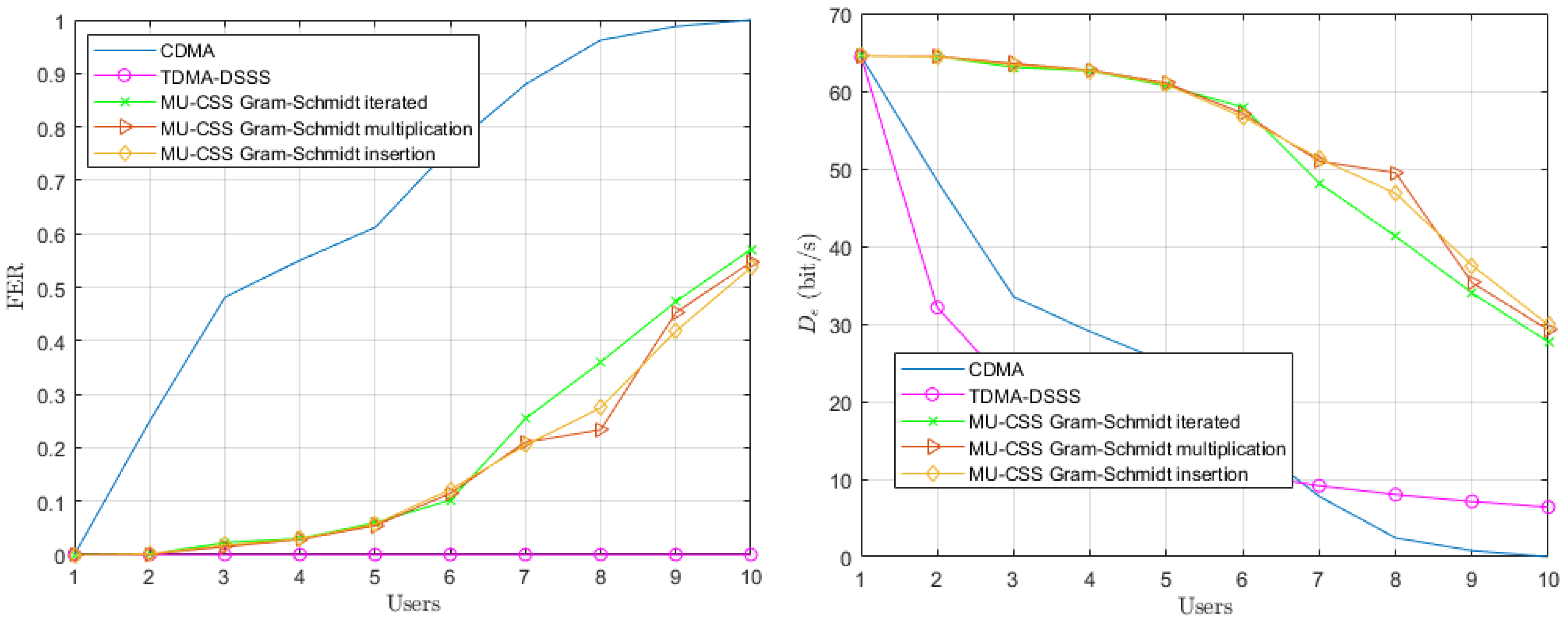
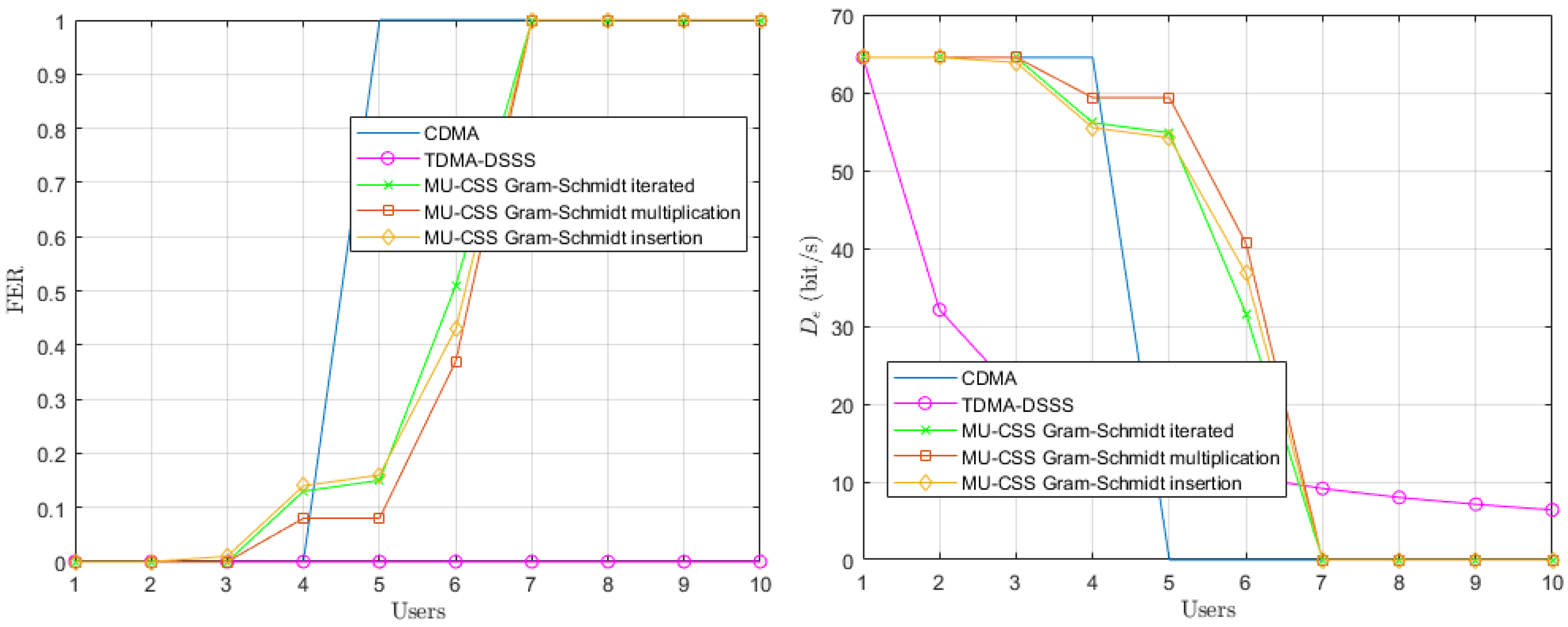
4.6. Time-Varying Channel and Static Users
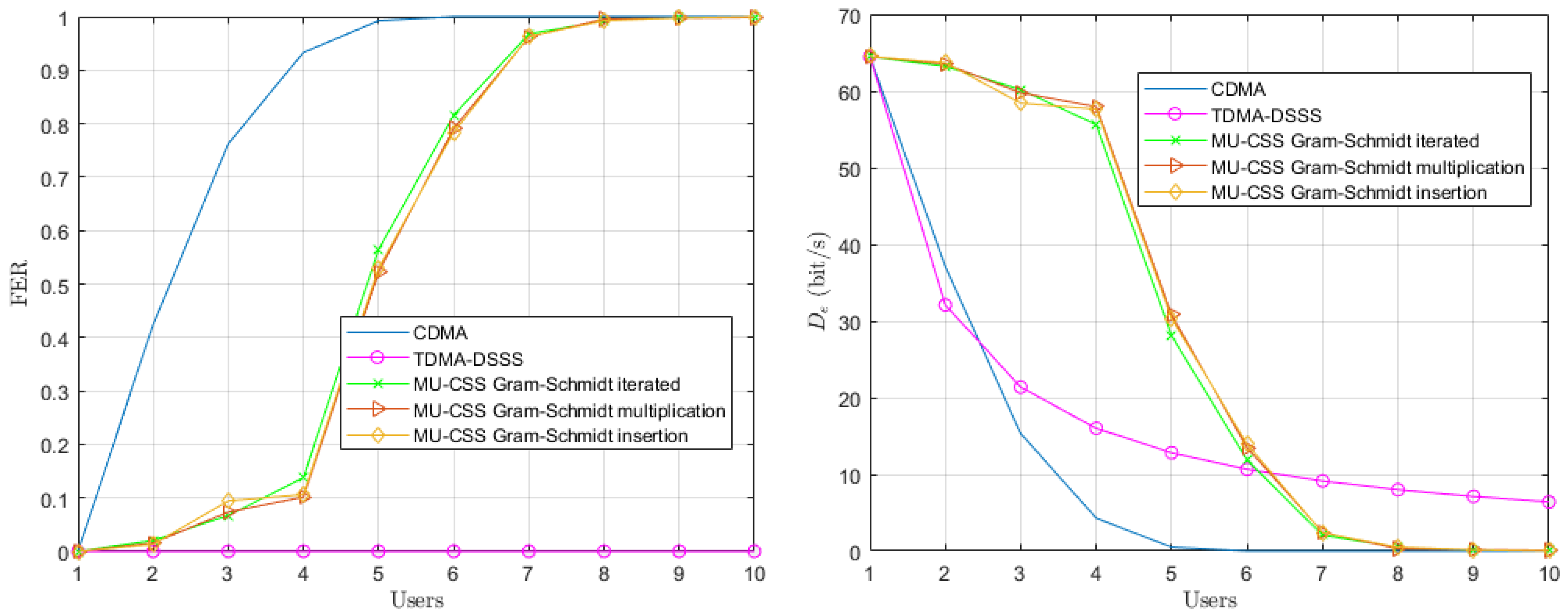
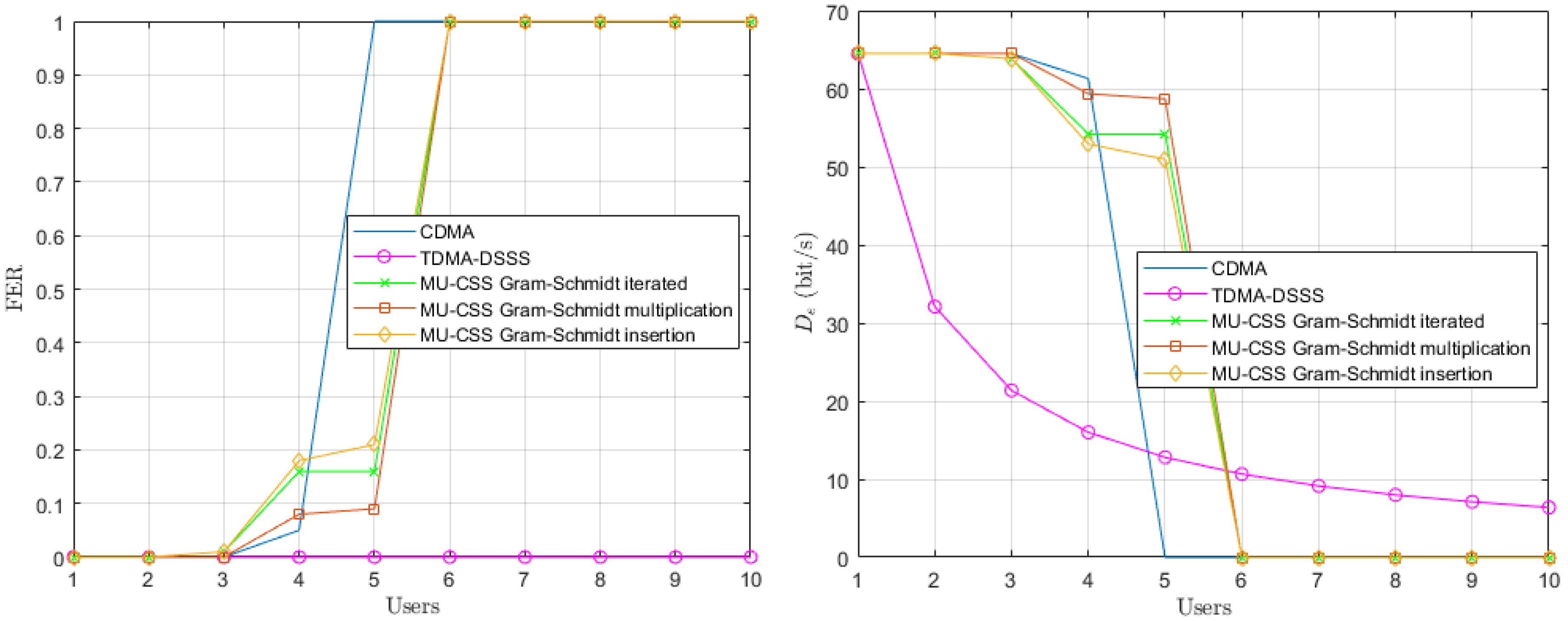
4.7. Time-Varying Channel and Mobile Users
5. Experimental Results
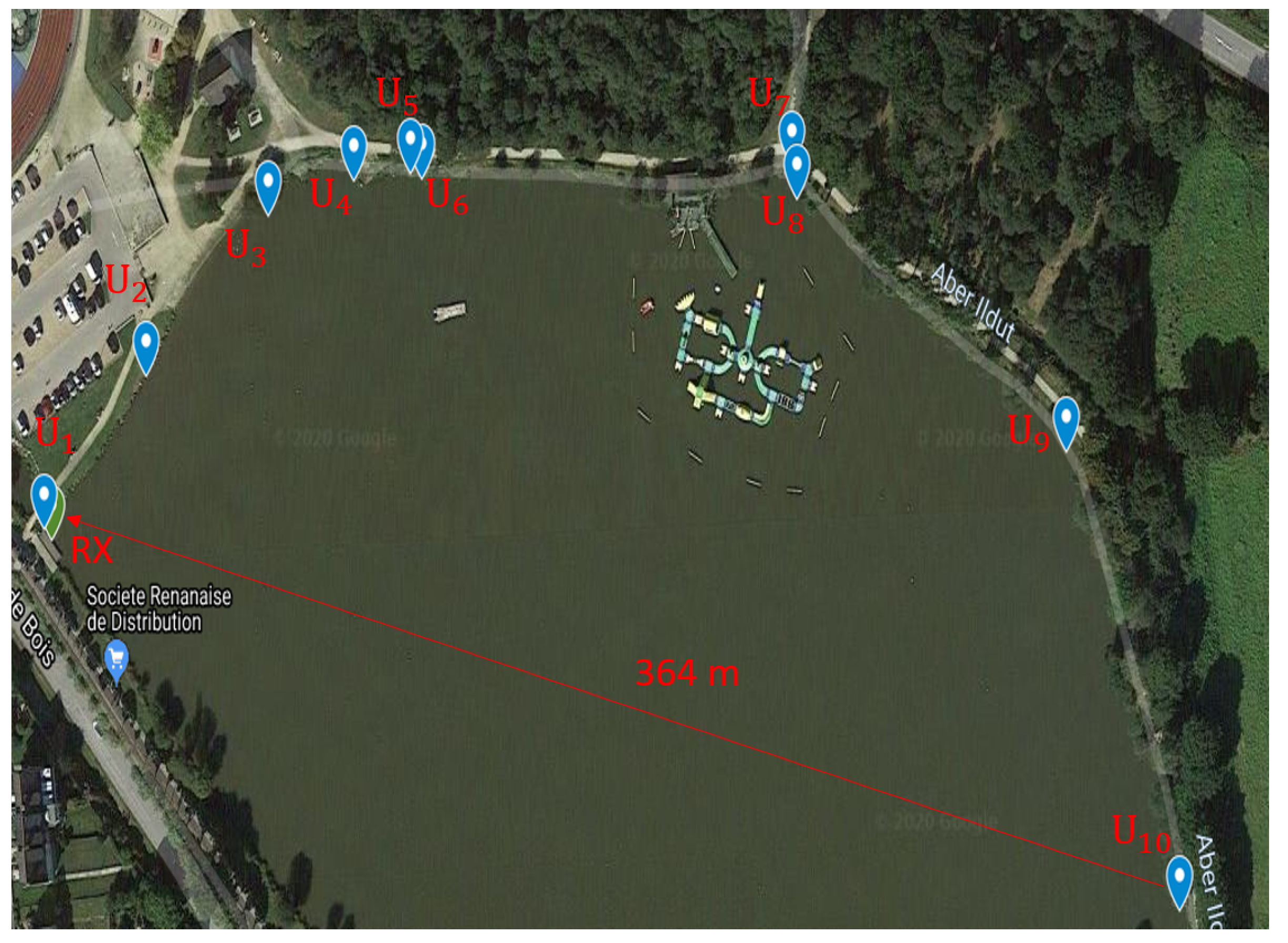
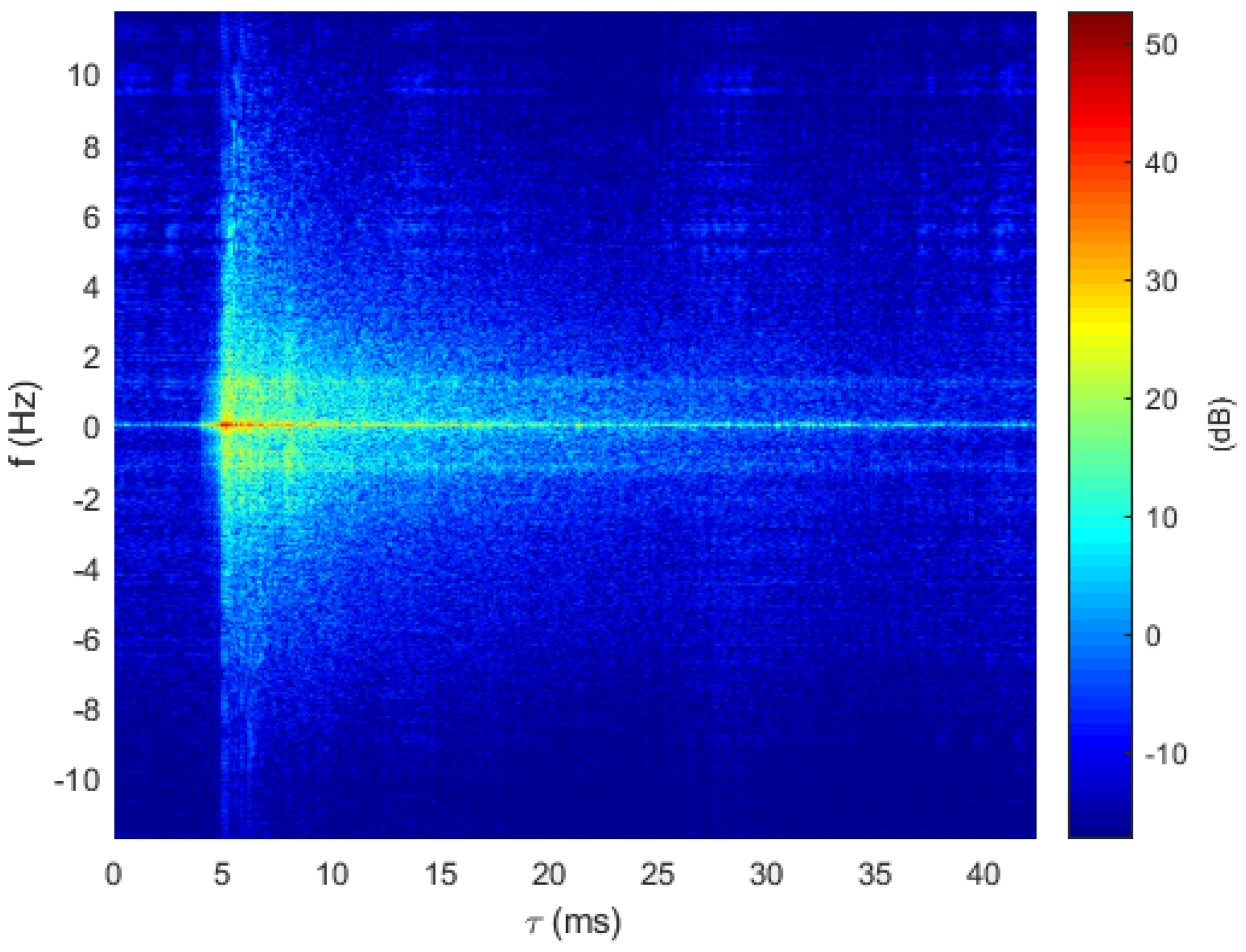
5.1. Channel Sounding
Ty-Colo Lake of Saint-Renan (France)
5.2. Watermark Replay Channel
5.3. Performance Results
5.3.1. Static Users
5.3.2. Mobile Users
6. Conclusions and Future Works
Author Contributions
Funding
Conflicts of Interest
Appendix A. Calculation of γi,k, ηi,k and wi,k
Appendix B. Justification of the MU-CSS Gram–Schmidt Construction Process
References
- Stojanovic, M. Underwater Acoustic Communications: Design Considerations on the Physical Layer. In Proceedings of the 2008 Fifth Annual Conference on Wireless on Demand Network Systems and Services, Garmisch-Partenkirchen, Germany, 23–25 January 2008; pp. 1–10. [Google Scholar] [CrossRef] [Green Version]
- Stojanovic, M.; Beaujean, P.P.J. Acoustic Communication. In Springer Handbook of Ocean Engineering; Dhanak, M.R., Xiros, N.I., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 359–386. [Google Scholar] [CrossRef]
- Champion, B.T.; Joordens, M.A. Underwater swarm robotics review. In Proceedings of the 2015 10th System of Systems Engineering Conference (SoSE), San Antonio, TX, USA, 17–20 May 2015; pp. 111–116. [Google Scholar] [CrossRef]
- Abramson, N. Development of the ALOHANET. IEEE Trans. Inf. Theory 1985, 31, 119–123. [Google Scholar] [CrossRef]
- Chirdchoo, N.; Soh, W.S.; Chua, K.C. Aloha-Based MAC Protocols with Collision Avoidance for Underwater Acoustic Networks. In Proceedings of the IEEE INFOCOM 2007, 26th IEEE International Conference on Computer Communications, Anchorage, AK, USA, 6–12 May 2007; pp. 2271–2275. [Google Scholar] [CrossRef]
- Colvin, A. CSMA with collision avoidance. Comput. Commun. 1983, 6, 227–235. [Google Scholar] [CrossRef]
- Otnes, R.; Asterjadhi, A.; Casari, P.; Goetz, M.; Husøy, T.; Nissen, I.; Rimstad, K.; Walree, P.v.; Zorzi, M. Underwater Acoustic Networking Techniques; Springer Briefs in Electrical and Computer Engineering; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Trivedi, V.K.; Kumar, P. Carrier Interferometry Coded Single Carrier FDMA (CI/SC-FDMA) for Next Generation Underwater Acoustic Communication. Wireless Personal Commun. 2017, 95, 4747–4762. [Google Scholar] [CrossRef]
- Pompili, D.; Melodia, T.; Akyildiz, I.F. A CDMA-based Medium Access Control for UnderWater Acoustic Sensor Networks. IEEE Trans. Wireless Commun. 2009, 8, 1899–1909. [Google Scholar] [CrossRef]
- Konstantakos, D.; Tsimenidis, C.; Adams, A.; Sharif, B. Comparison of DS-CDMA and MC-CDMA techniques for dual-dispersive fading acoustic communication networks. IEE Proc. Commun. 2005, 152, 1031–1038. [Google Scholar] [CrossRef]
- Stojanovic, M.; Freitag, L. Multichannel Detection for Wideband Underwater Acoustic CDMA Communications. IEEE J. Oceanic Eng. 2006, 31, 685–695. [Google Scholar] [CrossRef] [Green Version]
- Yang, T.C. Spatially Multiplexed CDMA Multiuser Underwater Acoustic Communications. IEEE J. Oceanic Eng. 2016, 41, 217–231. [Google Scholar] [CrossRef]
- Yuan, F.; Wei, Q.; Cheng, E. Multiuser chirp modulation for underwater acoustic channel based on VTRM. Int. J. Naval Architect. Ocean Eng. 2016, 9. [Google Scholar] [CrossRef] [Green Version]
- Bernard, C.; Bouvet, P.J. Multiuser Underwater Acoustic Communication for an AUV Fleet. In Proceedings of the OCEANS 2019—Marseille, Marseille, France, 17–20 June 2019. [Google Scholar]
- Qarabaqi, P.; Stojanovic, M. Statistical Characterization and Computationally Efficient Modeling of a Class of Underwater Acoustic Communication Channels. IEEE J. Oceanic Eng. 2013, 38, 701–717. [Google Scholar] [CrossRef]
- Aval, Y.M.; Wilson, S.K.; Stojanovic, M. On the Achievable Rate of a Class of Acoustic Channels and Practical Power Allocation Strategies for OFDM Systems. IEEE J. Oceanic Eng. 2015, 40, 785–795. [Google Scholar] [CrossRef]
- Van Walree, P.; Socheleau, F.X.; Otnes, R.; Jenserud, T. The Watermark Benchmark for Underwater Acoustic Modulation Schemes. IEEE J. Oceanic Eng. 2017, 42, 1007–1018. [Google Scholar] [CrossRef] [Green Version]
- Aval, Y.M.; Stojanovic, M. Differentially Coherent Multichannel Detection of Acoustic OFDM Signals. IEEE J. Oceanic Eng. 2015, 40, 251–268. [Google Scholar] [CrossRef]
- Aval, Y.M.; Wilson, S.K.; Stojanovic, M. On the Average Achievable Rate of QPSK and DQPSK OFDM Over Rapidly Fading Channels. IEEE Access 2018, 6, 23659–23667. [Google Scholar] [CrossRef]
- Proakis, J.G.; Salehi, M. Digital Communications, 5th ed.; McGraw-Hill: Boston, MA, USA, 2008. [Google Scholar]
- Ziemer, R.E.; Peterson, R.L.; Borth, D.E. Introduction to Spread-Spectrum Communications; Prentice Hall: Upper Saddle River, NJ, USA, 1995. [Google Scholar]
- Zhou, S.; Wang, Z. OFDM for Underwater Acoustic Communications; John Wiley & Sons Ltd.: Chichester, UK, 2014. [Google Scholar] [CrossRef]
- Kebkal, K.G.; Bannasch, R. Sweep-spread carrier for underwater communication over acoustic channels with strong multipath propagation. J. Acoust. Soc. Am. 2002, 112, 2043–2052. [Google Scholar] [CrossRef] [PubMed]
- Kaminsky, E. Chirp signaling offers modulation scheme for underwater communications. SPIE Newsroom 2006. [Google Scholar] [CrossRef] [Green Version]
- Lang, S. Introduction to Linear Algebra; Springer Inc.: New York, NY, USA, 1985. [Google Scholar]
- Sharif, B.S.; Neasham, J.; Hinton, O.R.; Adams, A.E. A computationally efficient Doppler compensation system for underwater acoustic communications. IEEE J. Oceanic Eng. 2000, 25, 52–61. [Google Scholar] [CrossRef]
- Van Walree, P. Channel Sounding for Acoustic Communications: Techniques and Shallow-Water Examples; Tech. Rep. FFI-Rapport; Norwegian Defence Research Establishment (FFI): Kjeller, Norway, 2011; Volume 7, p. 58. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Signification | Value |
|---|---|---|
| Center frequency | 23 kHz | |
| Number of AUVs | ||
| Sample frequency | 100 kHz | |
| B | Signal bandwidth | 4 kHz |
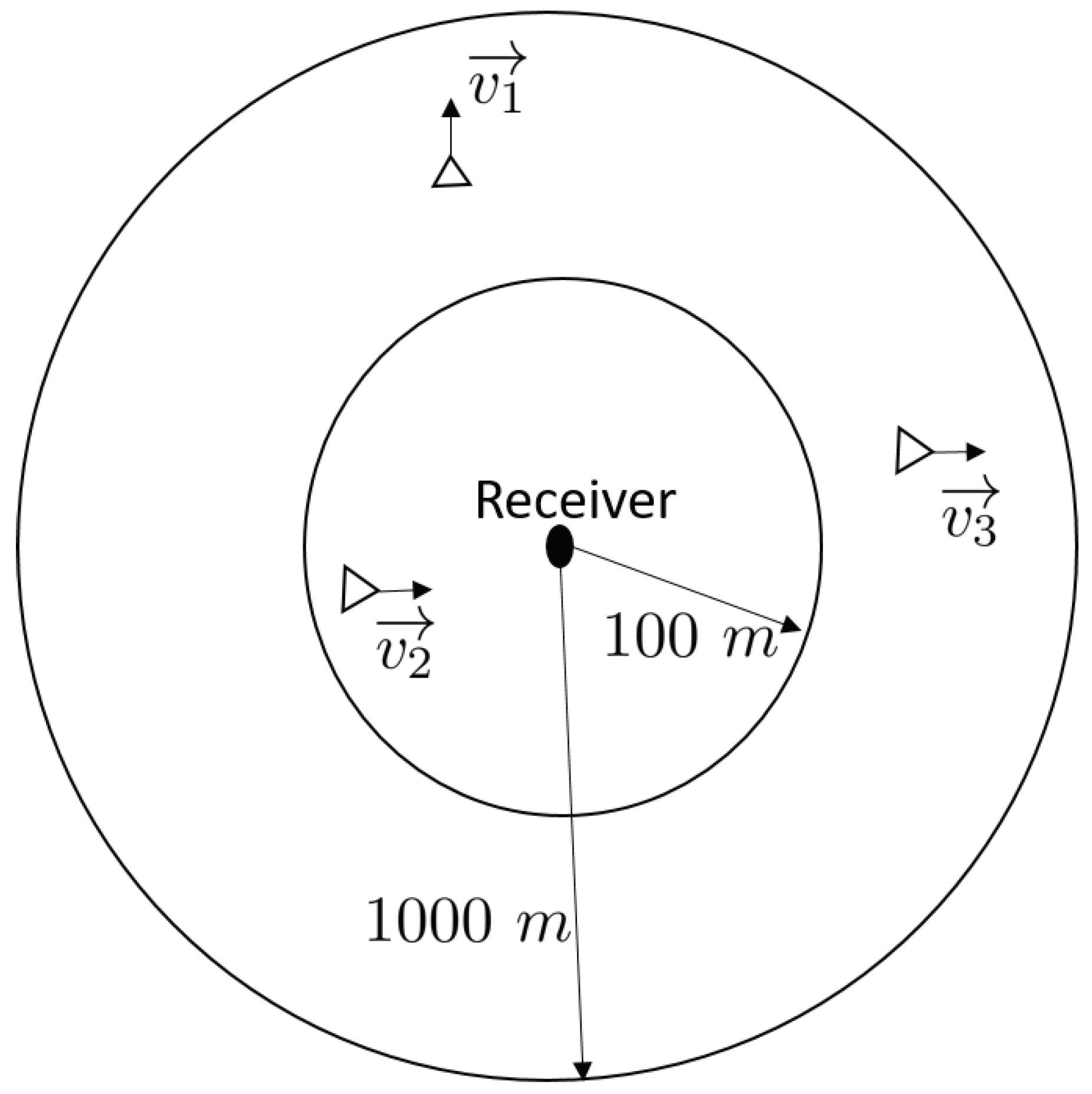
| Transmission range | km | |
| Water depth | 10 m | |
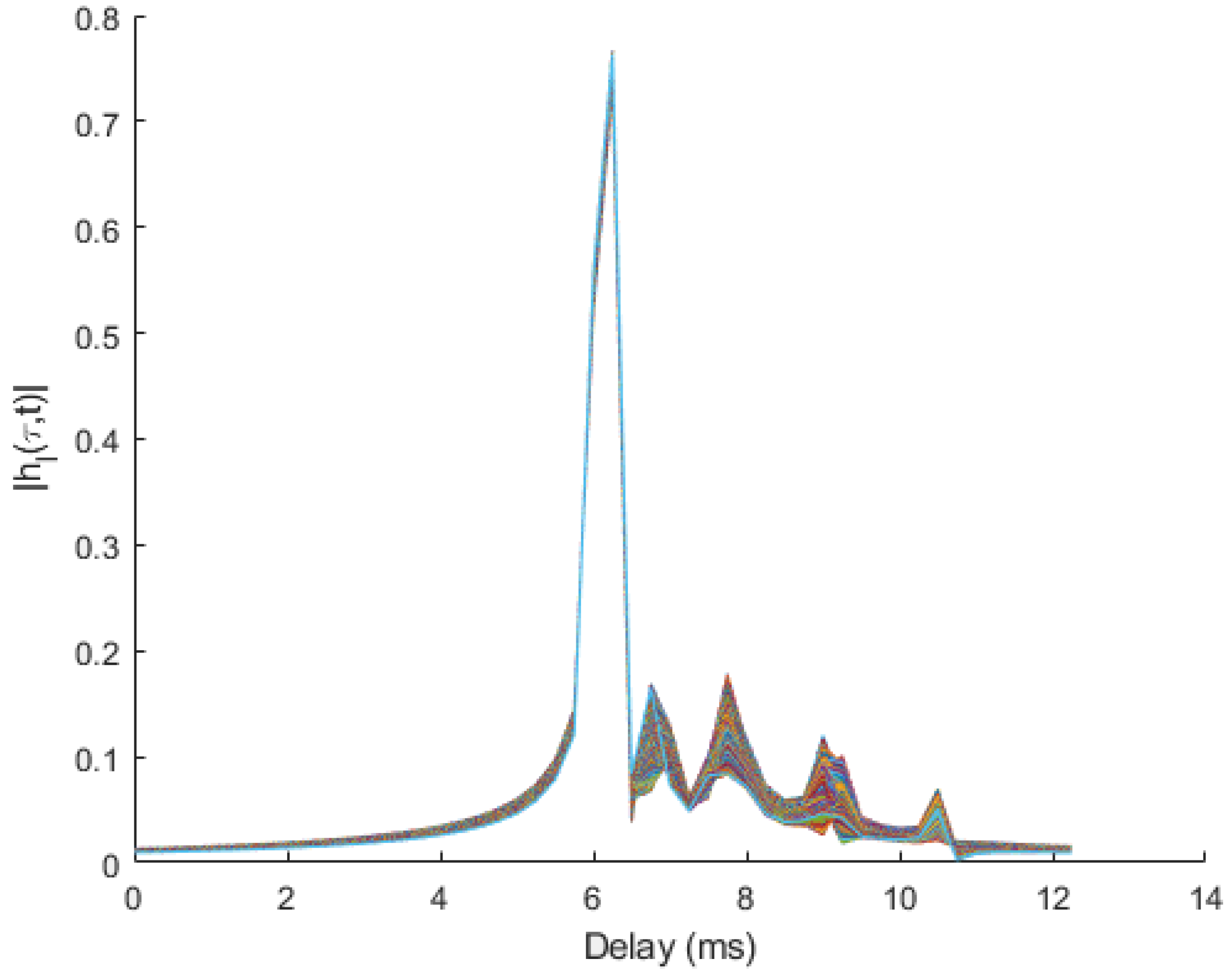
| RMS channel delay spread [20] | ms | |
| SNR | Signal to noise ratio | 10 dB |
| User relative speed | m/s | |
| Residual motion-induced Doppler spread standard deviation |
| Symbol | Signification | Value |
|---|---|---|
| M | Modulation order | 2 (DBPSK) |
| Number of symbols per frame | 200 | |
| Number of frames | 5000 | |
| FEC code type | Convolutive code | |
| FEC code generator | ( | |
| FEC code rate | ||
| Guard interval time | 15 ms | |
| Duration of the chirp signal | ms | |
| Chip duration | ms | |
| PN length code | 31 | |
| Number of iterations | 1000 | |
| p | Insertion step | 7 |
| Pulse shaping filter roll-off factor | ||
| Symbol duration | ms |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bernard, C.; Bouvet, P.-J.; Pottier, A.; Forjonel, P. Multiuser Chirp Spread Spectrum Transmission in an Underwater Acoustic Channel Applied to an AUV Fleet. Sensors 2020, 20, 1527. https://doi.org/10.3390/s20051527
Bernard C, Bouvet P-J, Pottier A, Forjonel P. Multiuser Chirp Spread Spectrum Transmission in an Underwater Acoustic Channel Applied to an AUV Fleet. Sensors. 2020; 20(5):1527. https://doi.org/10.3390/s20051527
Chicago/Turabian StyleBernard, Christophe, Pierre-Jean Bouvet, Antony Pottier, and Philippe Forjonel. 2020. "Multiuser Chirp Spread Spectrum Transmission in an Underwater Acoustic Channel Applied to an AUV Fleet" Sensors 20, no. 5: 1527. https://doi.org/10.3390/s20051527