Flow Field Perception of a Moving Carrier Based on an Artificial Lateral Line System

 , ,
, ,
Abstract
:1. Introduction
2. Proposed ALLS-AUV Model
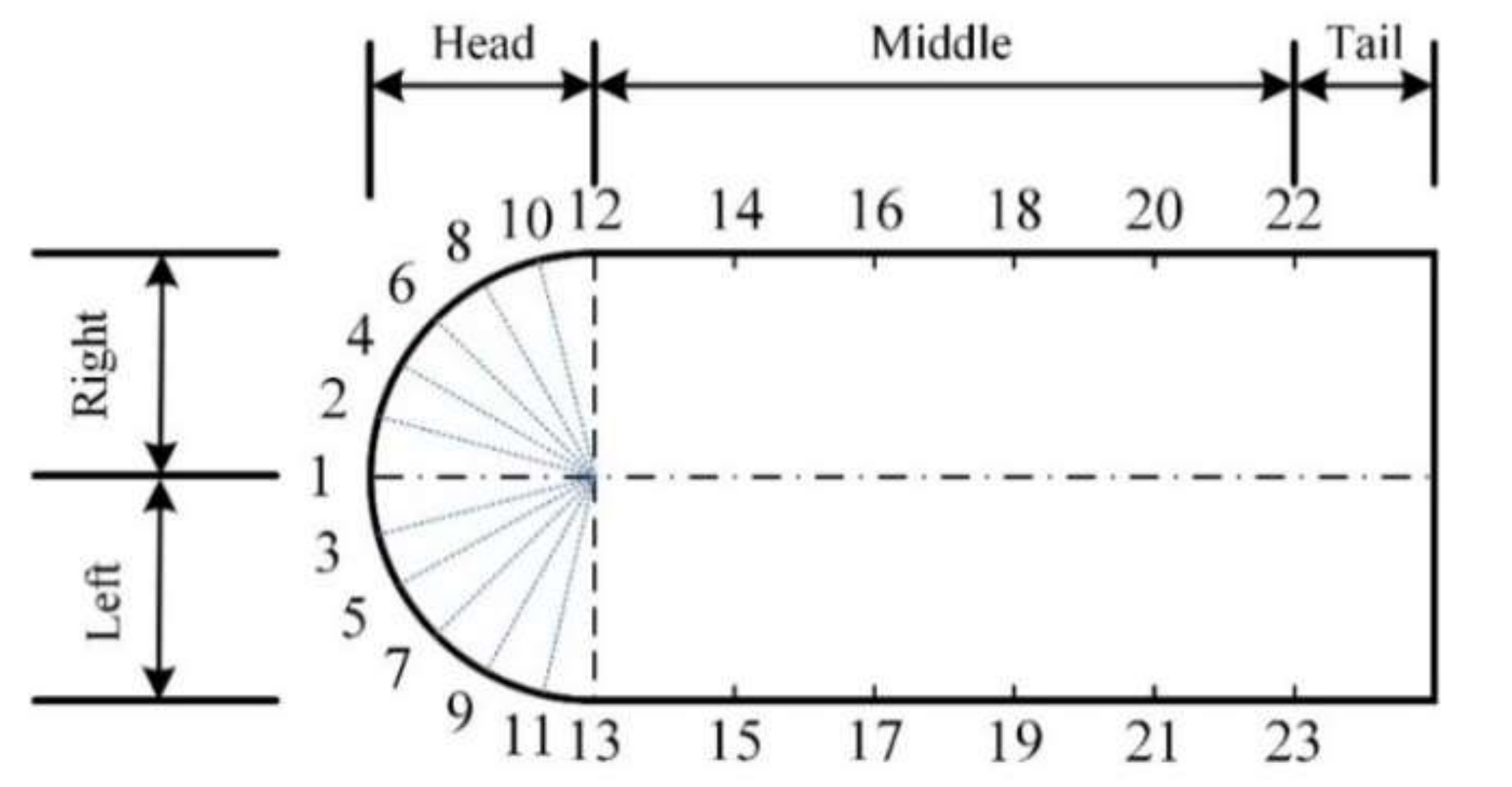
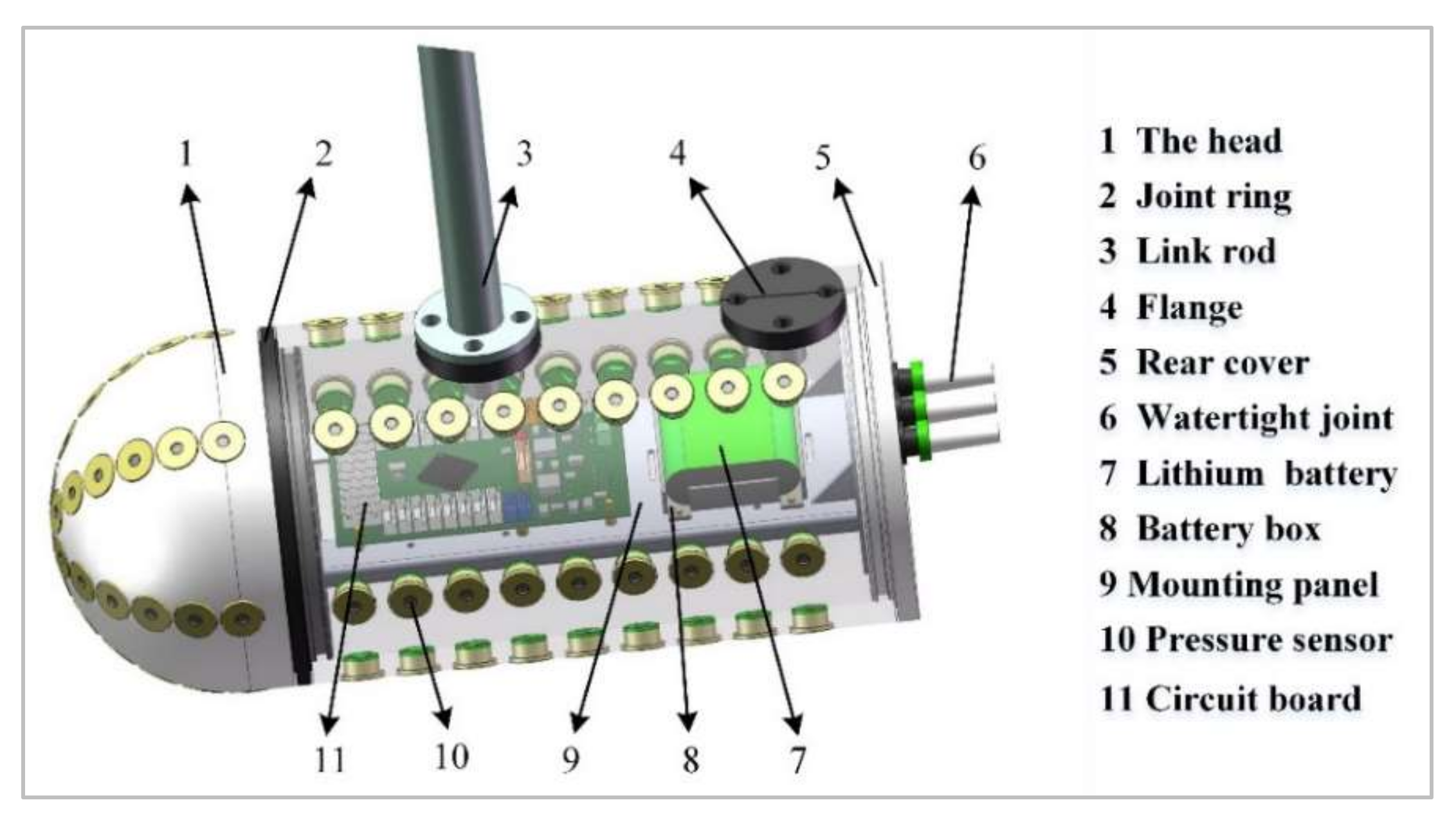
2.1. Model Establishment
2.2. Simulations in Different Flow Fields
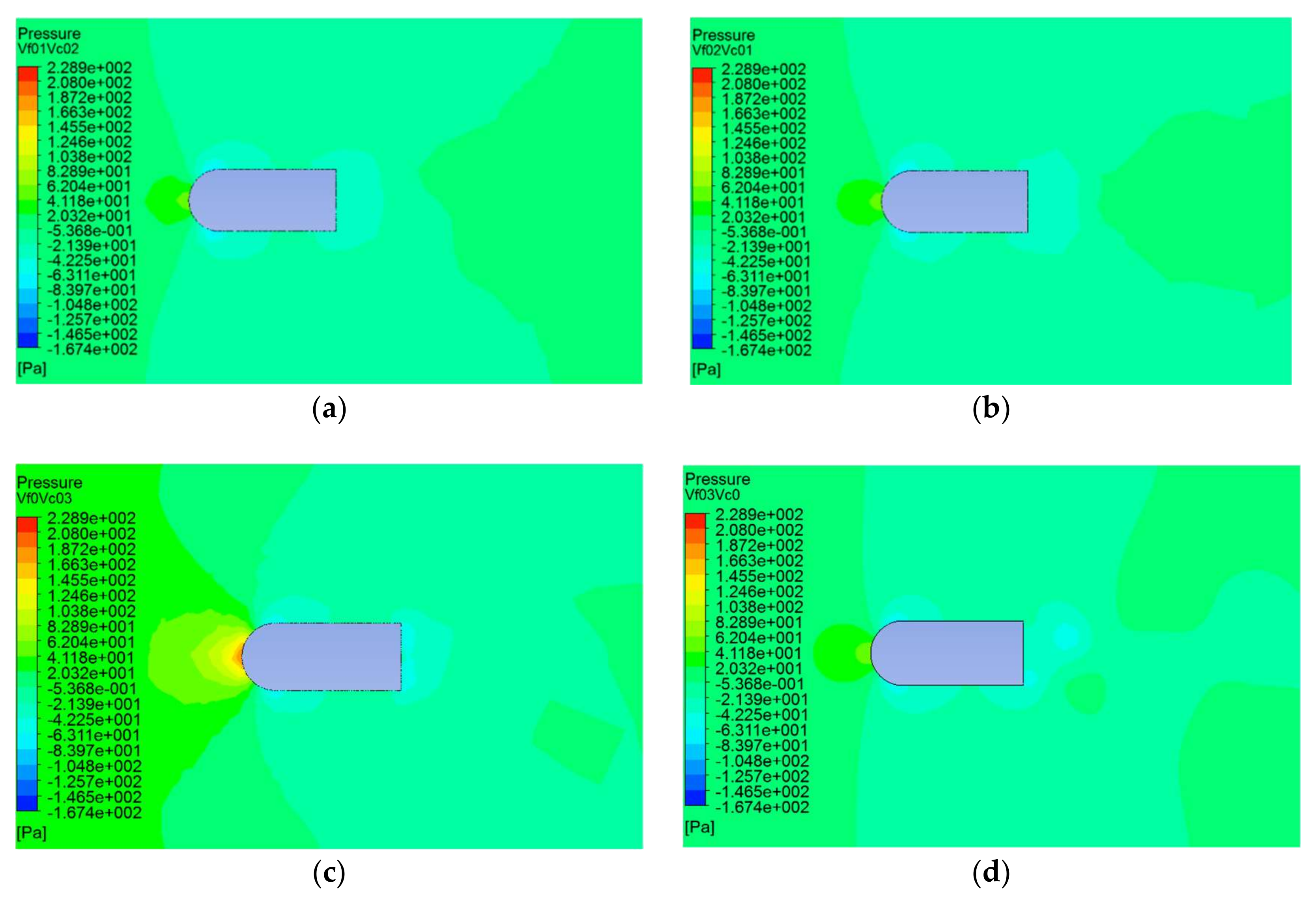
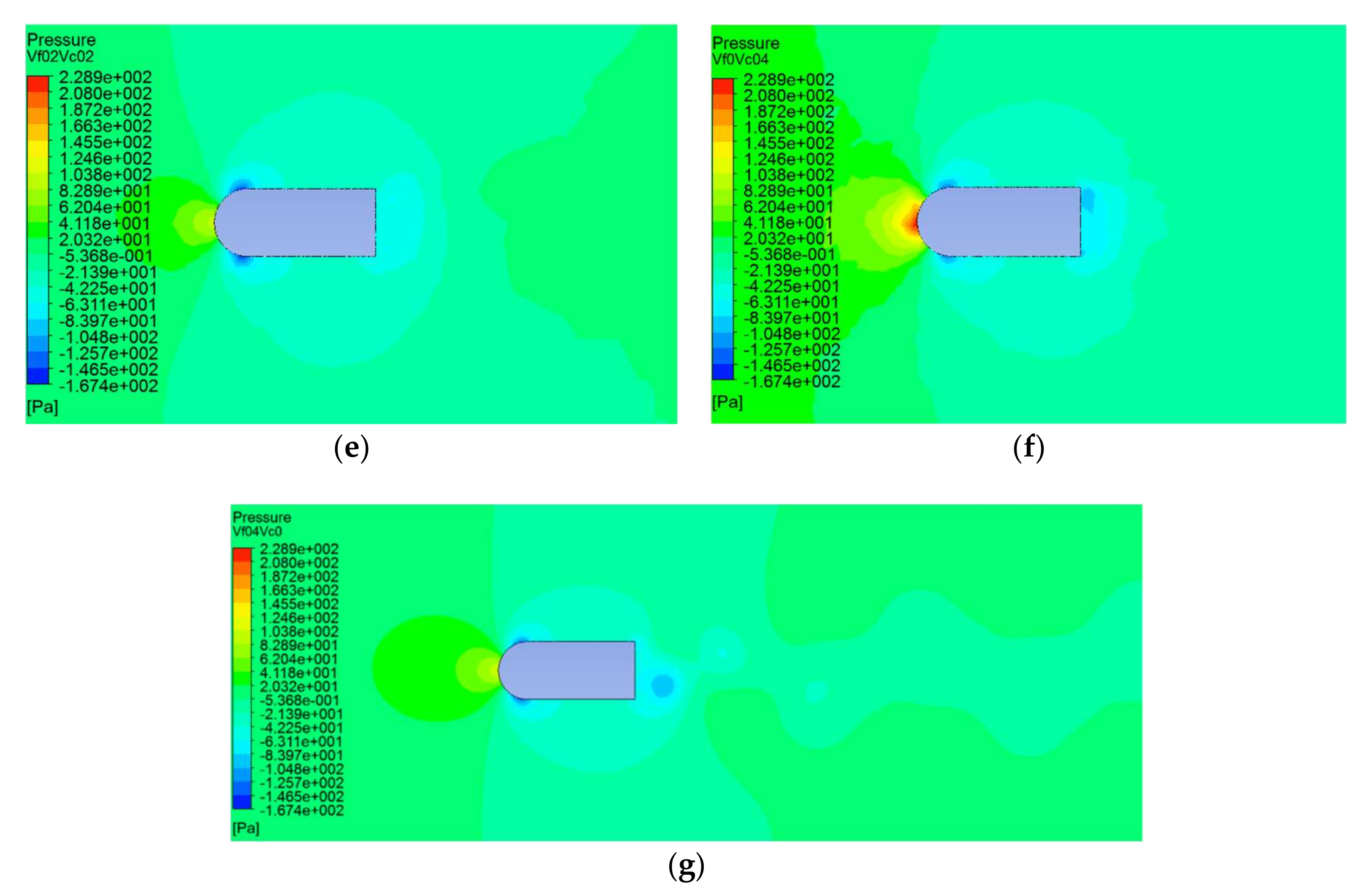
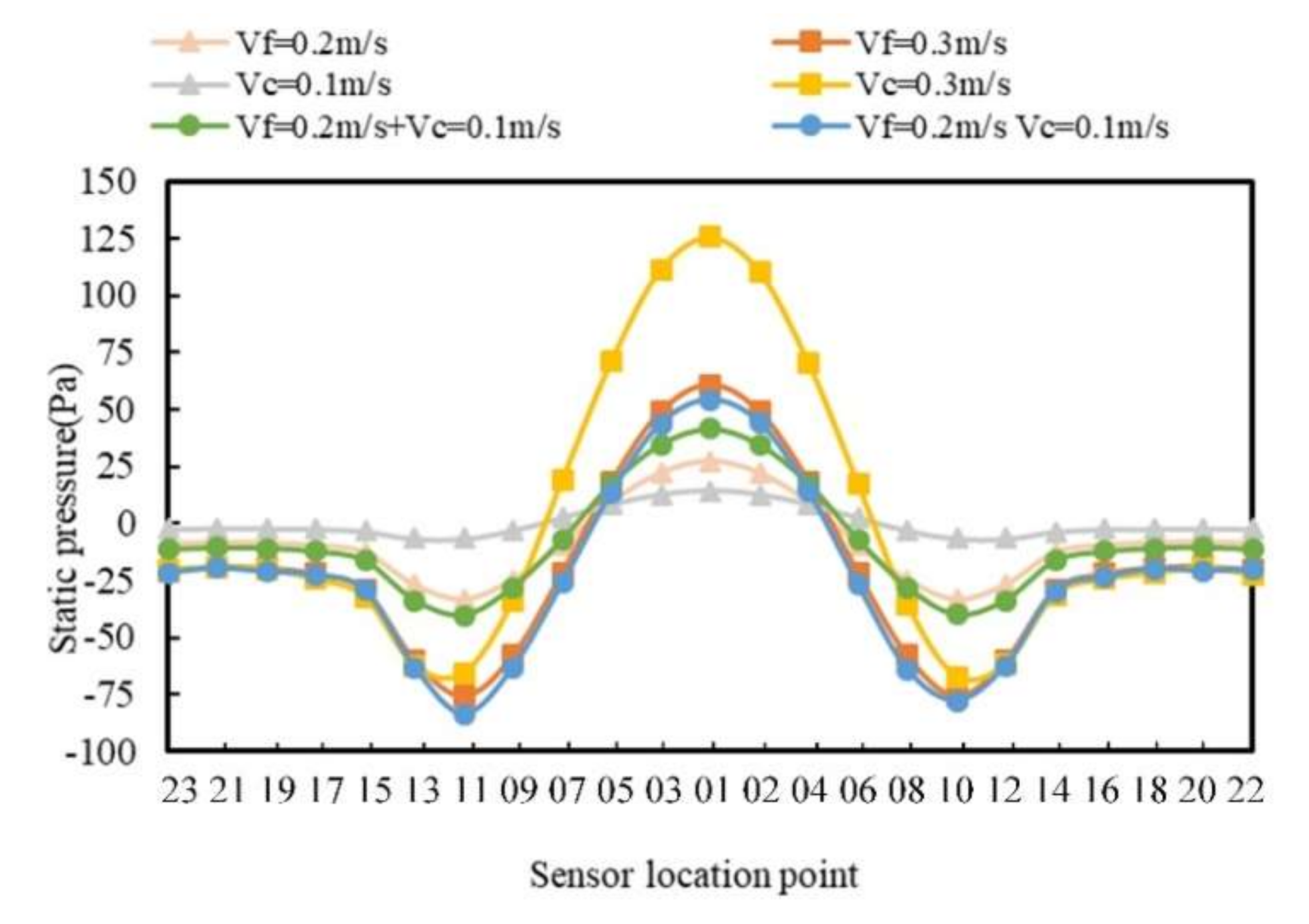
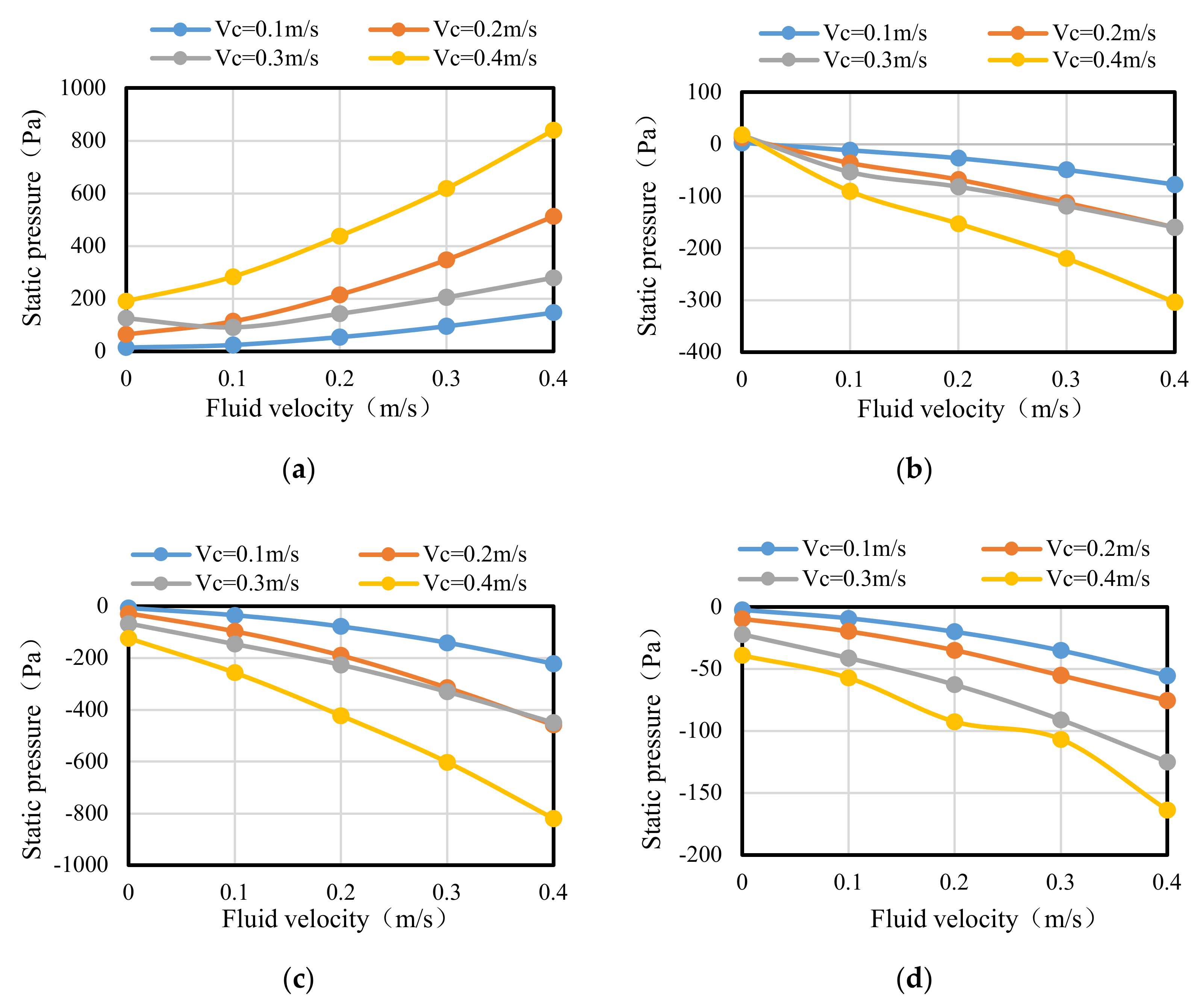
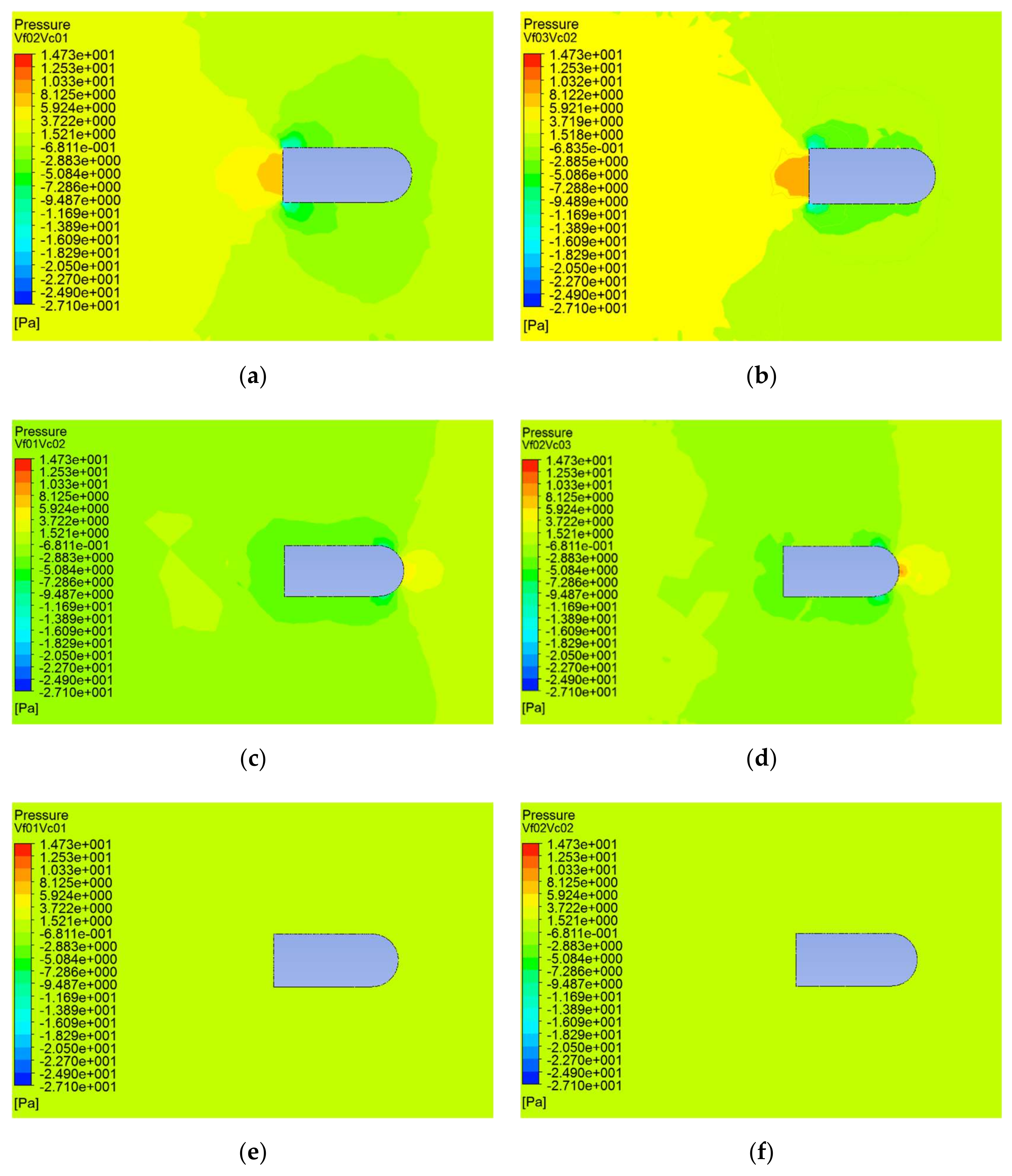
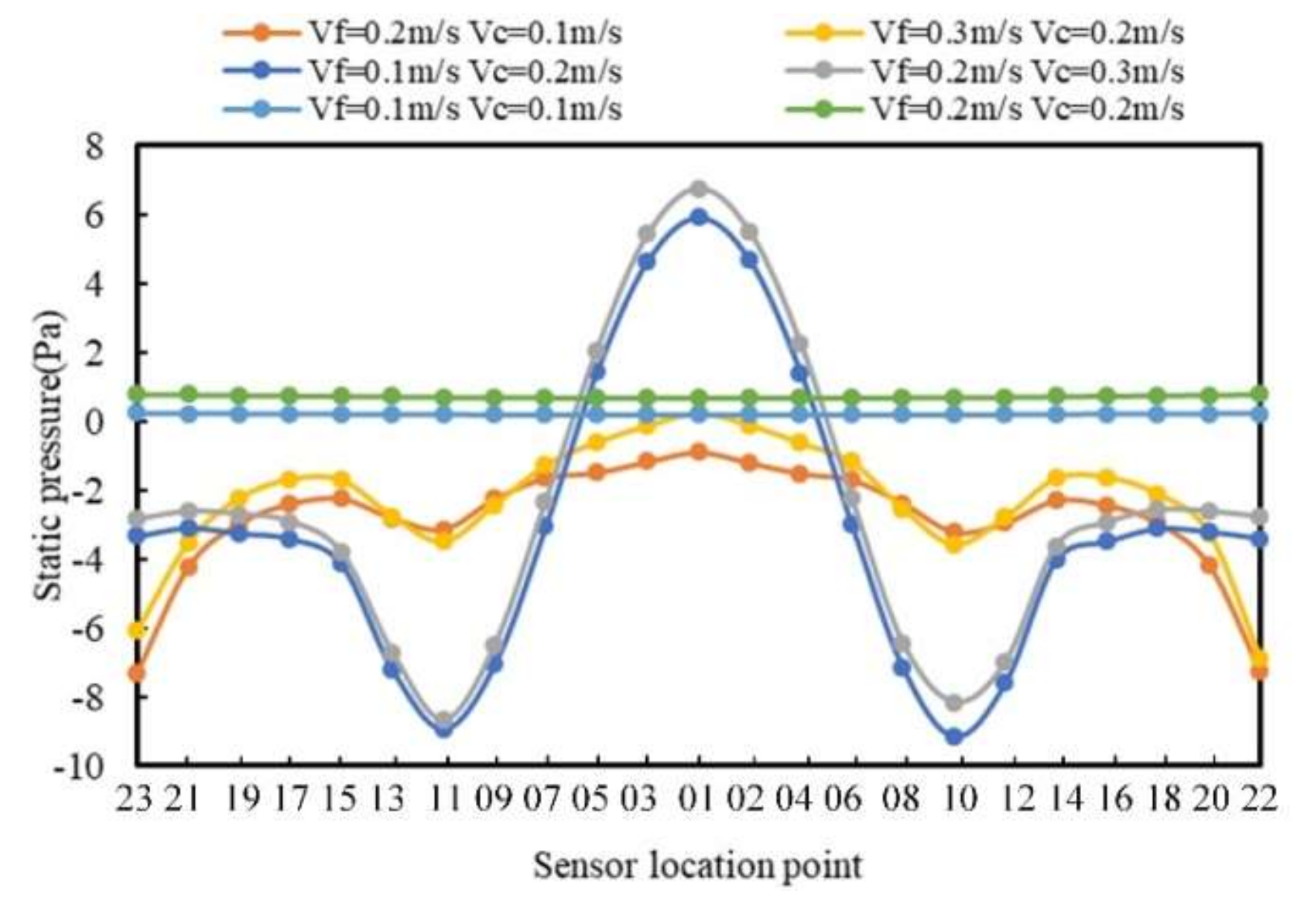
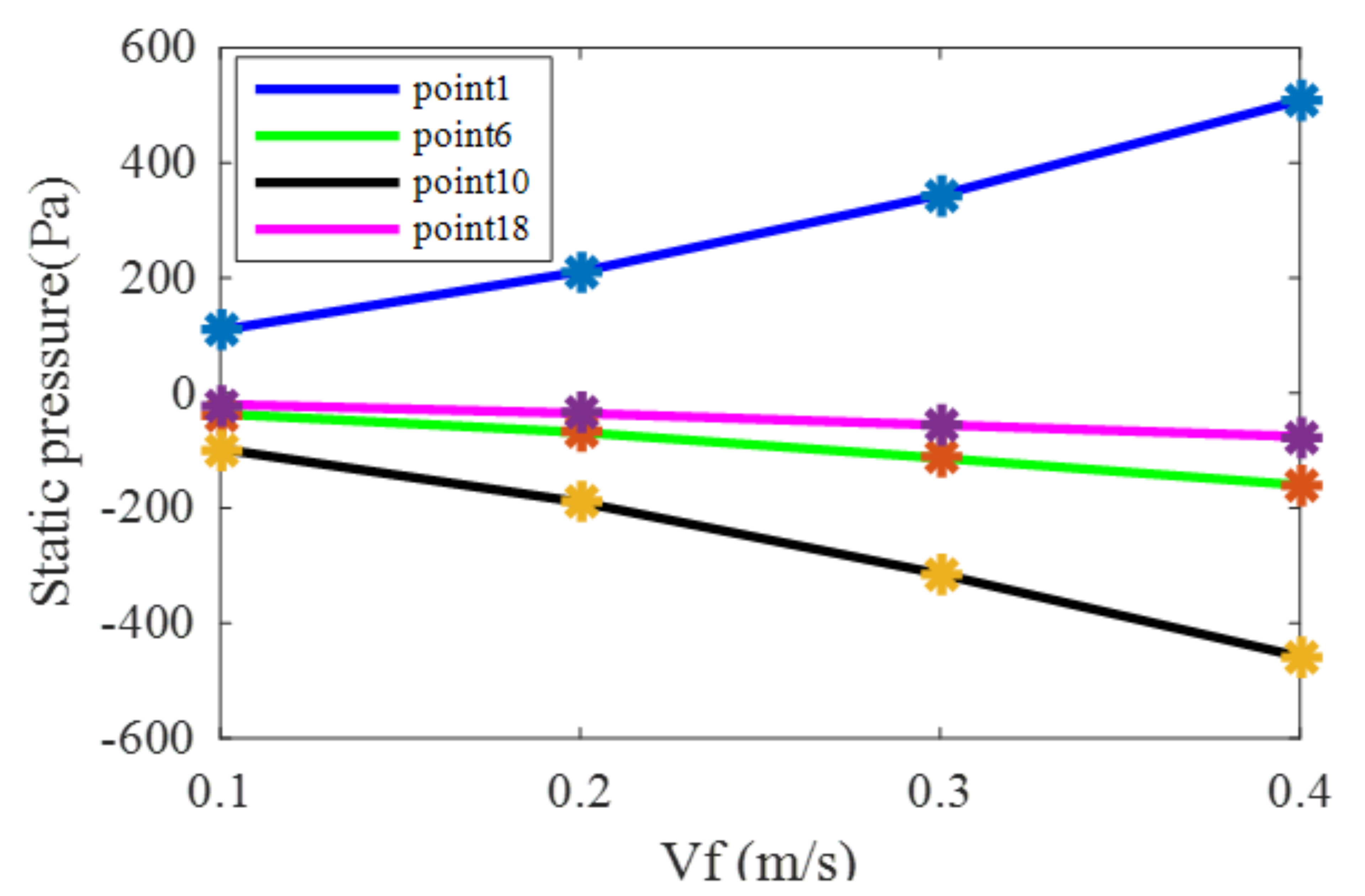
2.2.1. Analysis of Vf and Vc
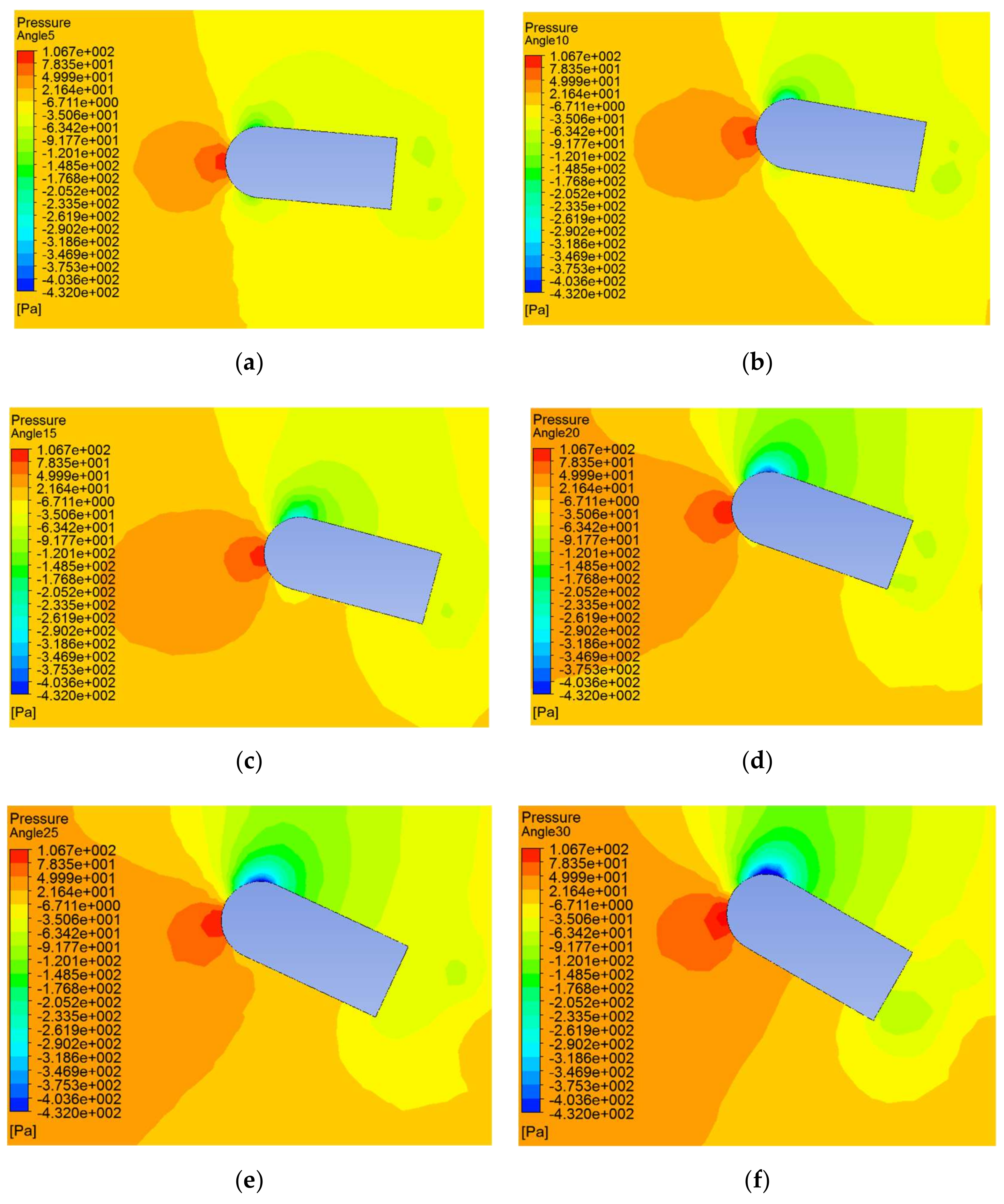
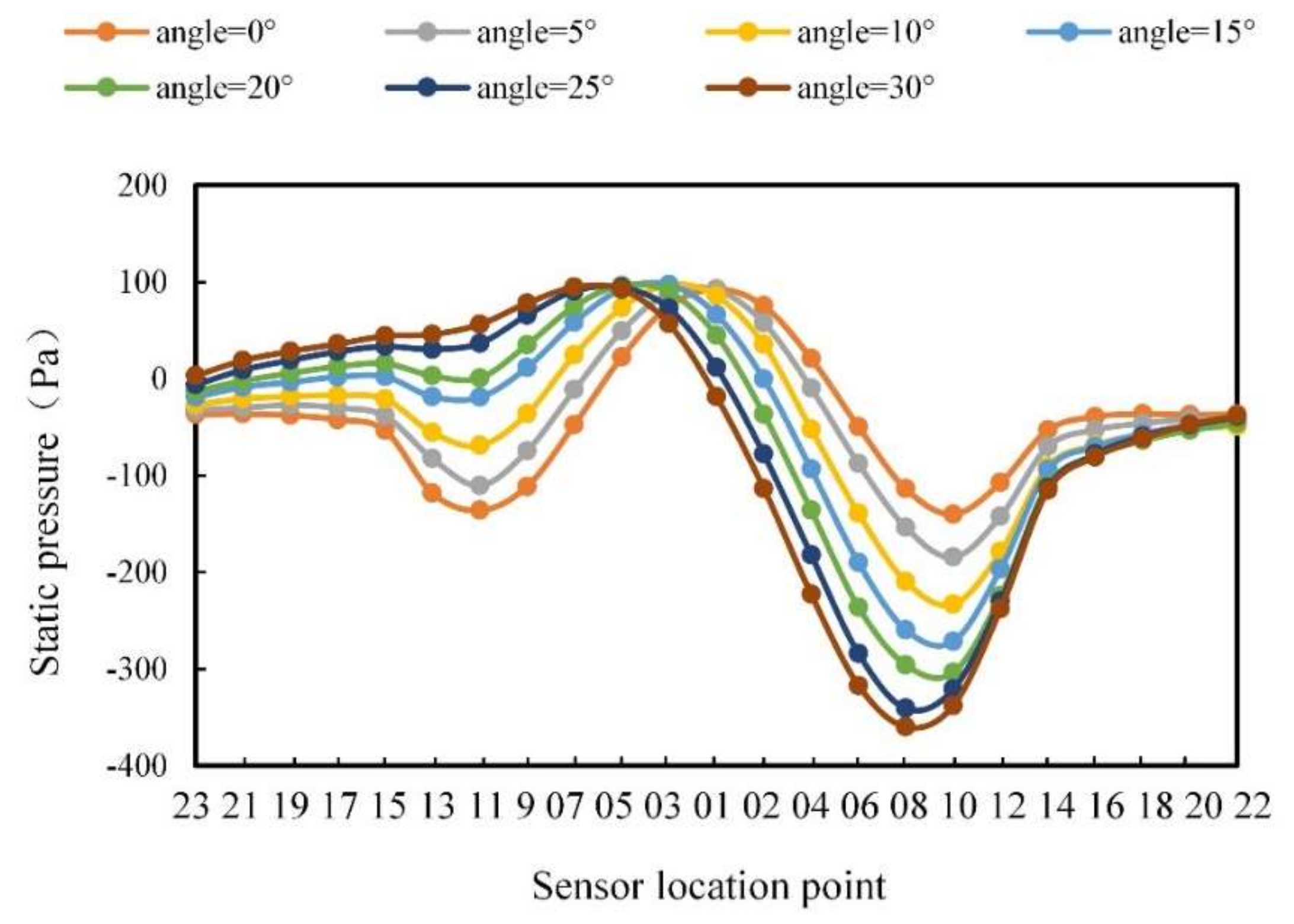
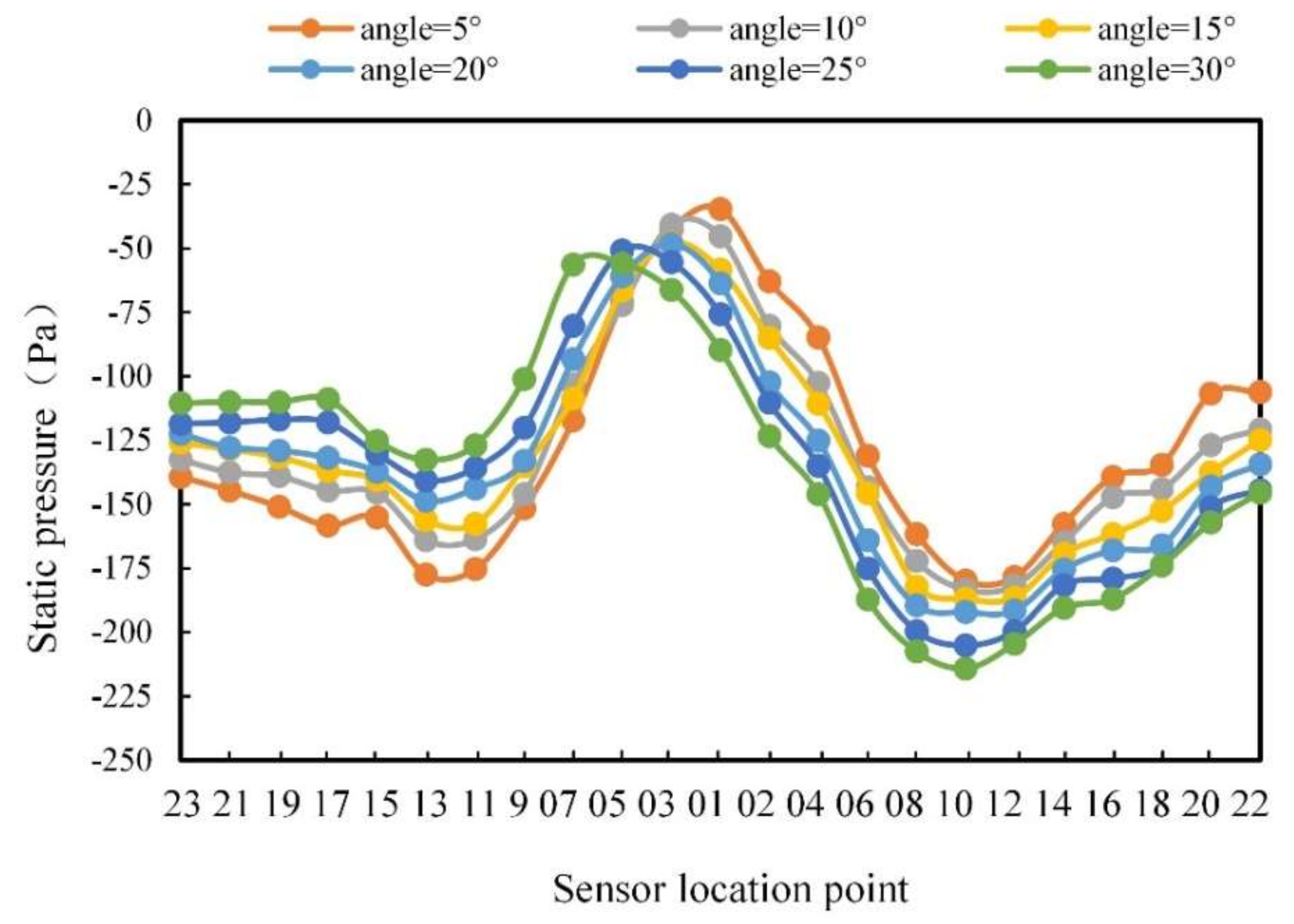
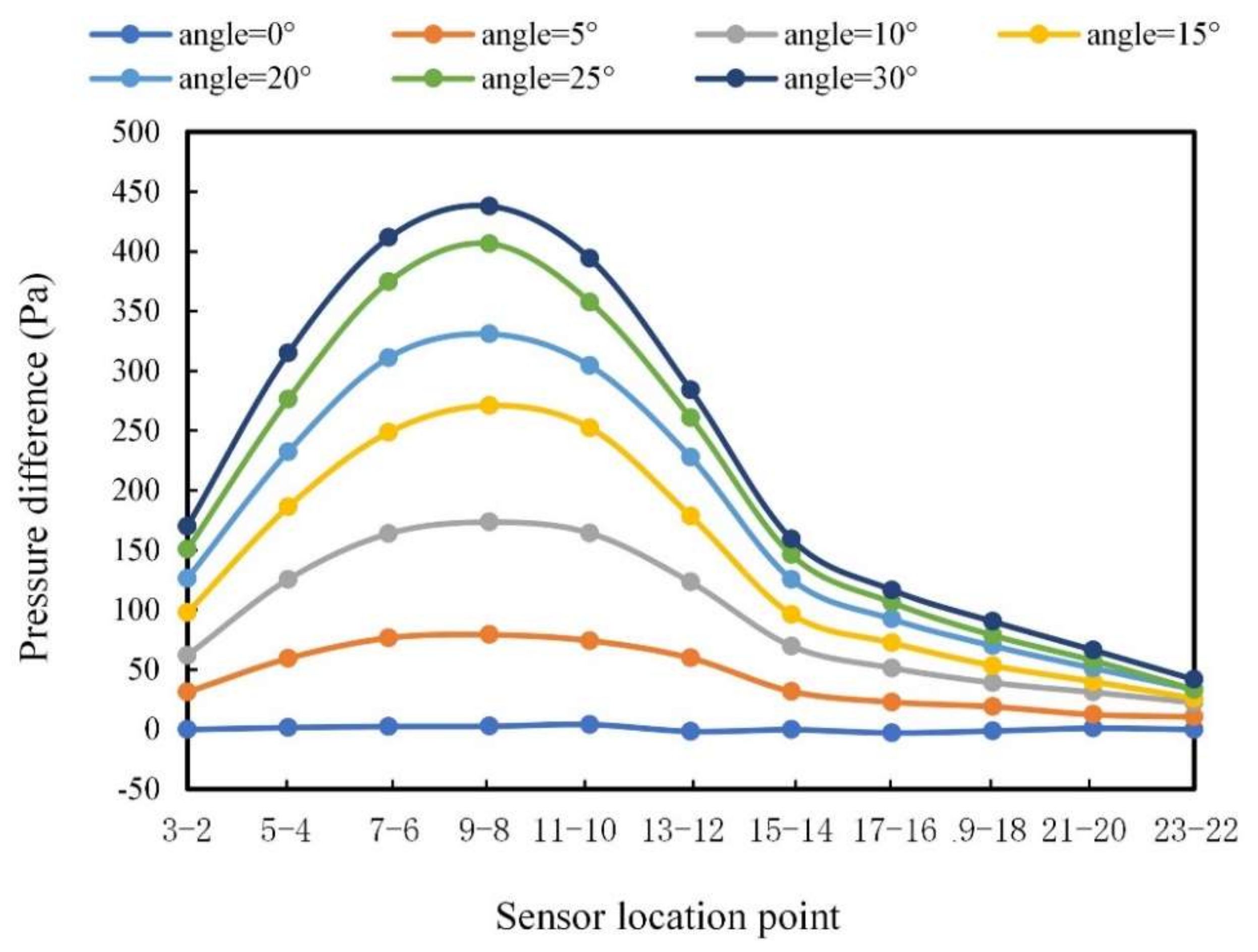
2.2.2. Analysis of flow angle
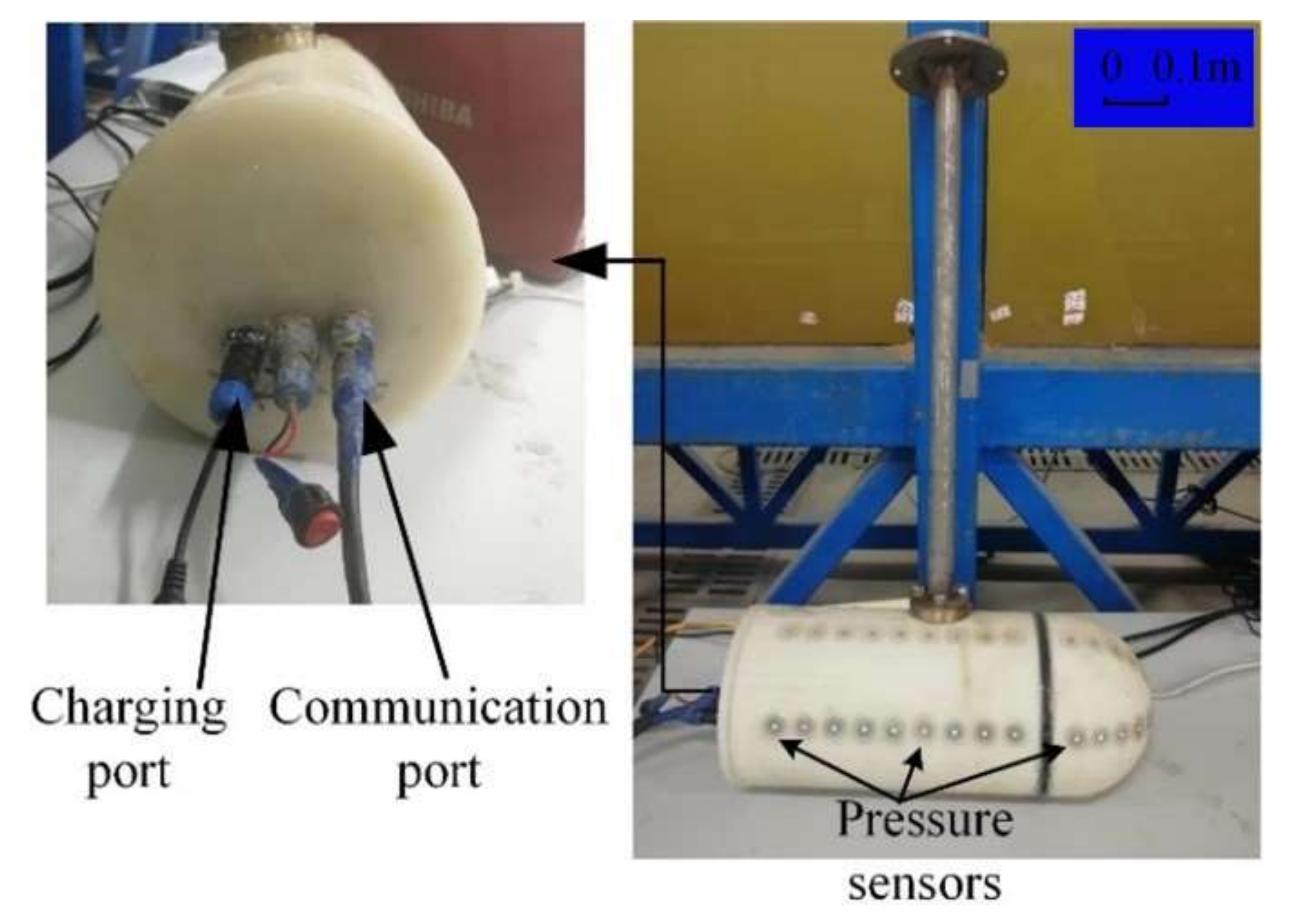
3. Experimental Evaluation
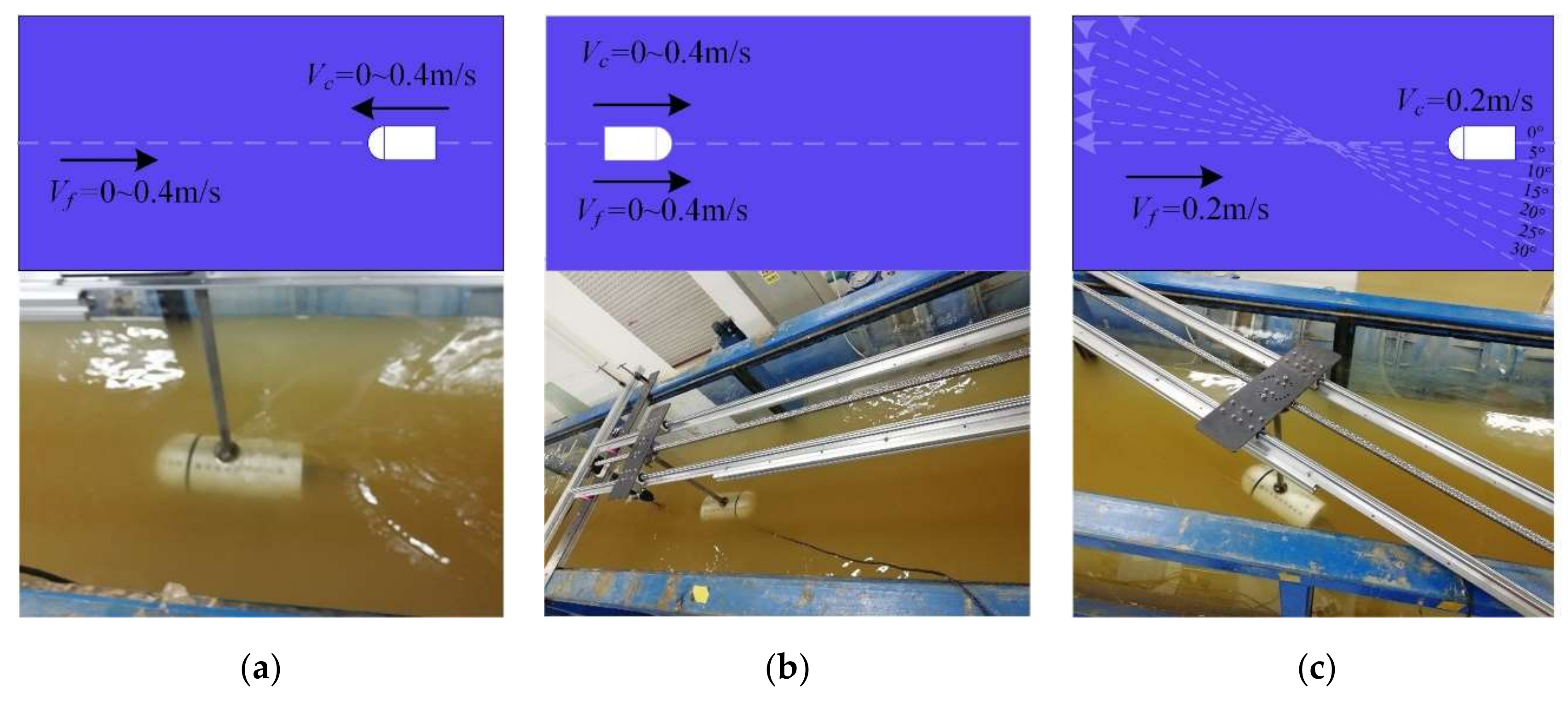
3.1. Experiment Process
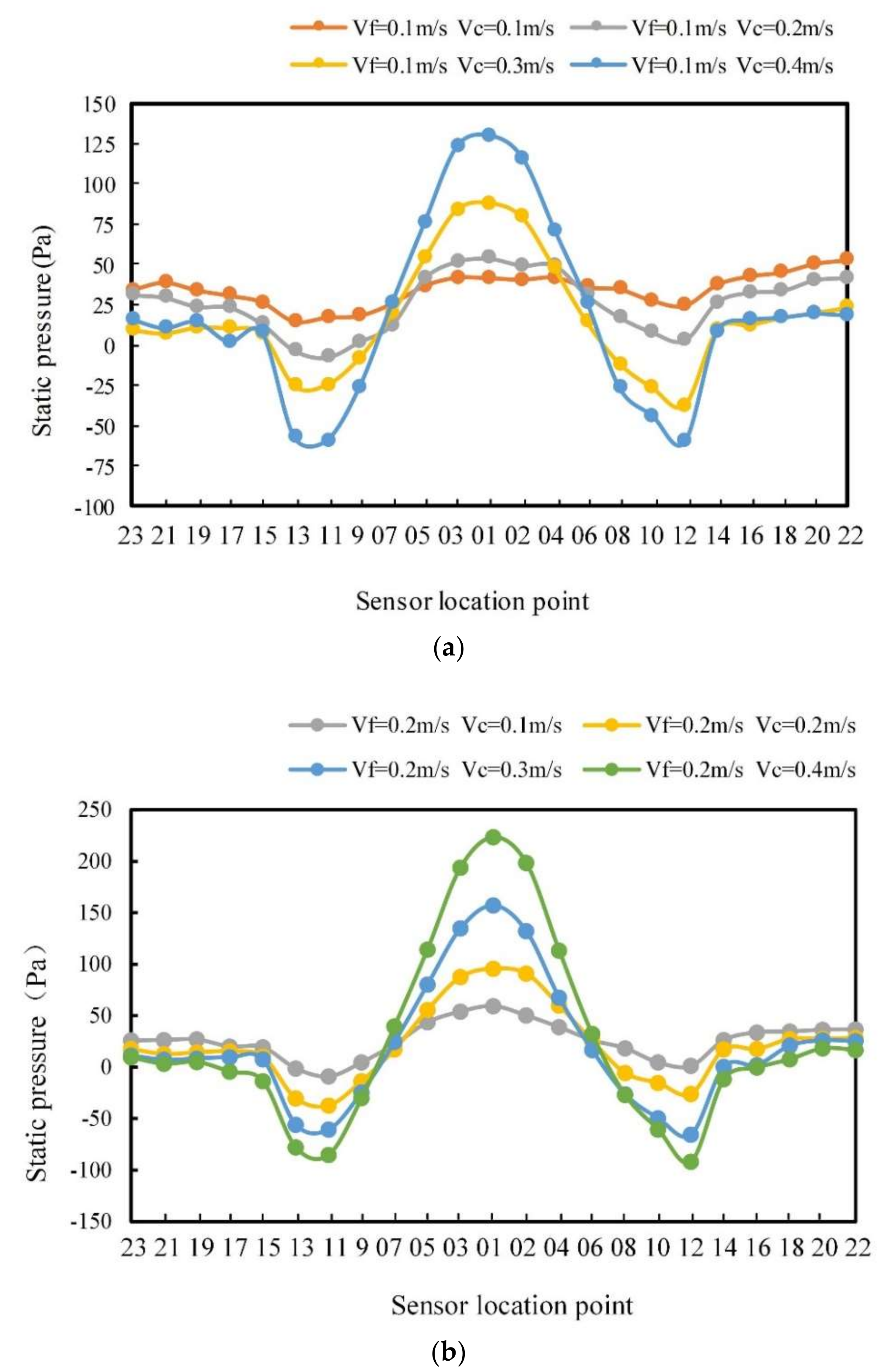
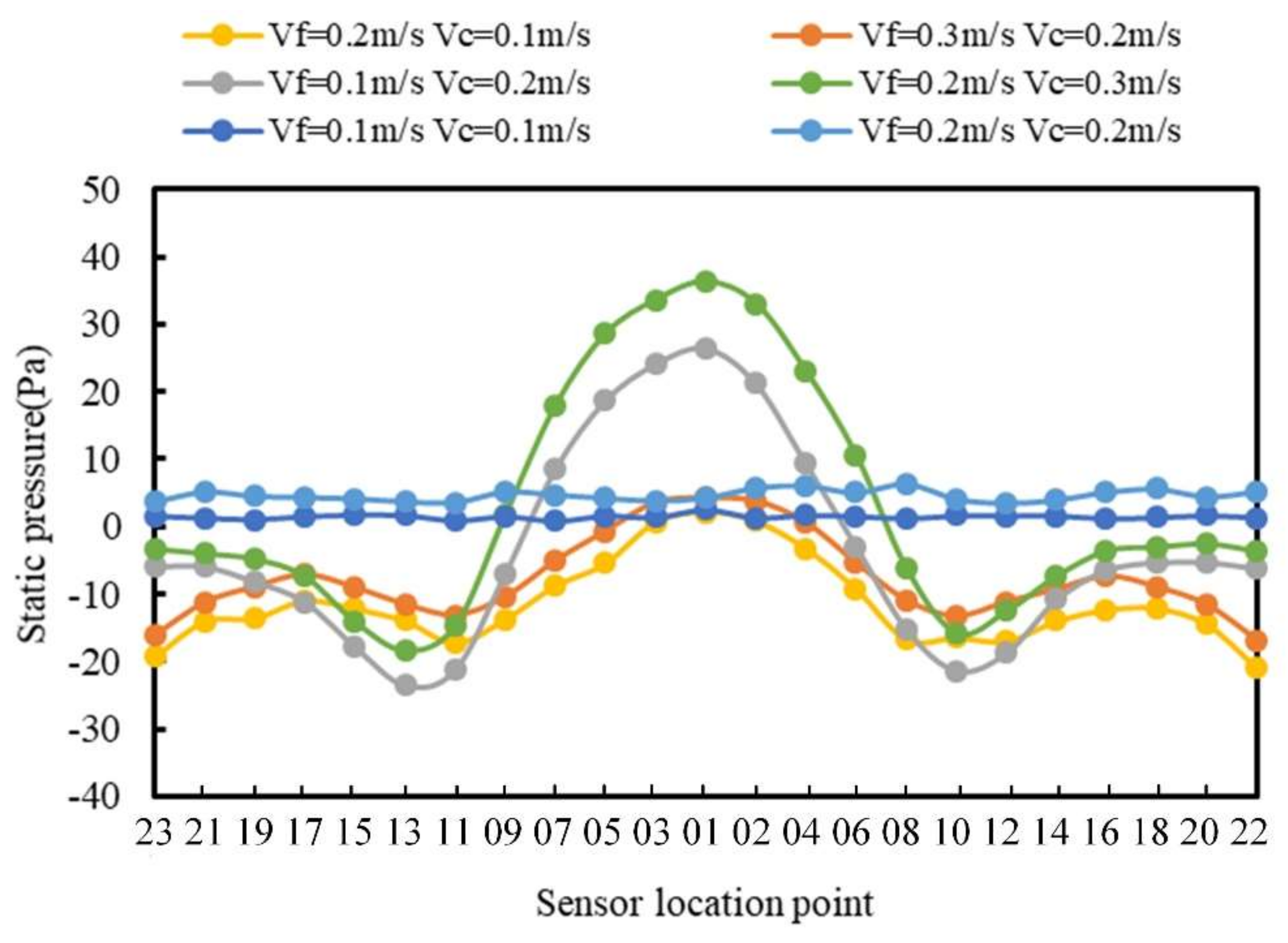
3.2. Experimental Results
3.2.1. Vf and Vc in the Opposite Direction
3.2.2. Vf and Vc in the Same Direction
3.2.3. Different Angles
4. Flow Field Estimation
4.1. Fitting Method to Estimate Fluid Velocity
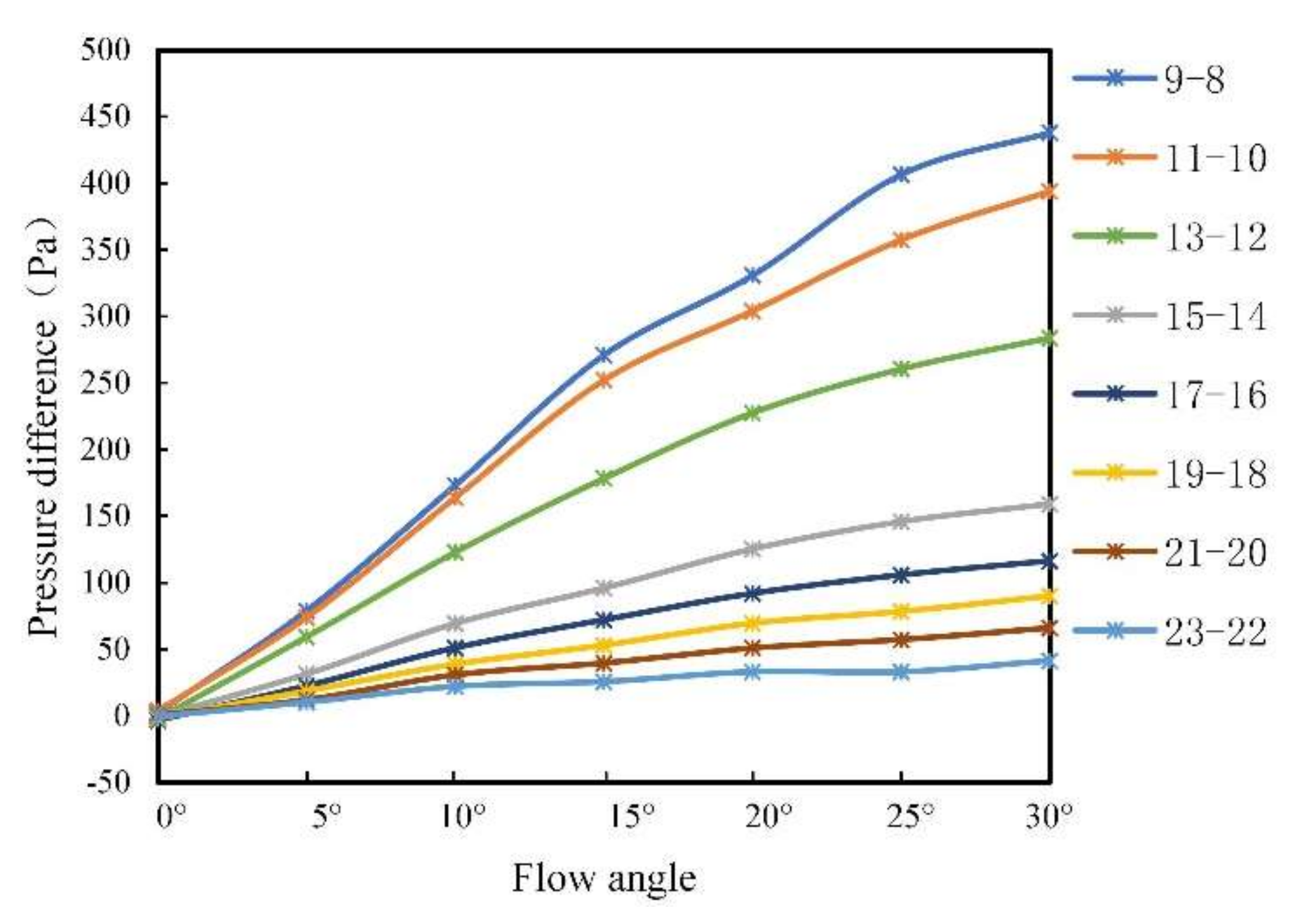
4.2. Differential Pressure Method to Estimate the Flow Angle
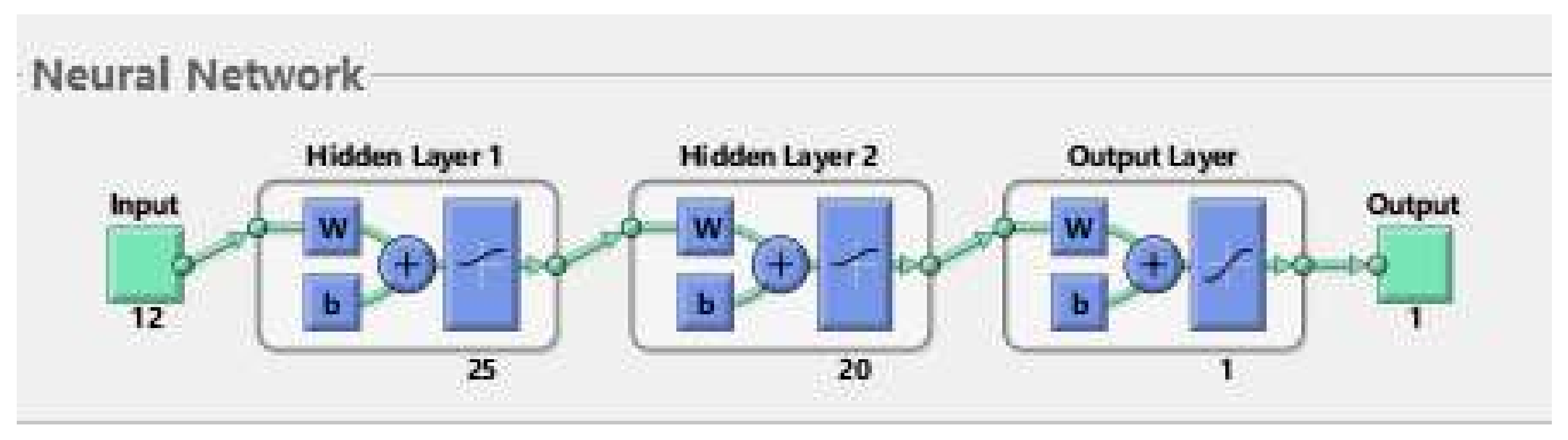
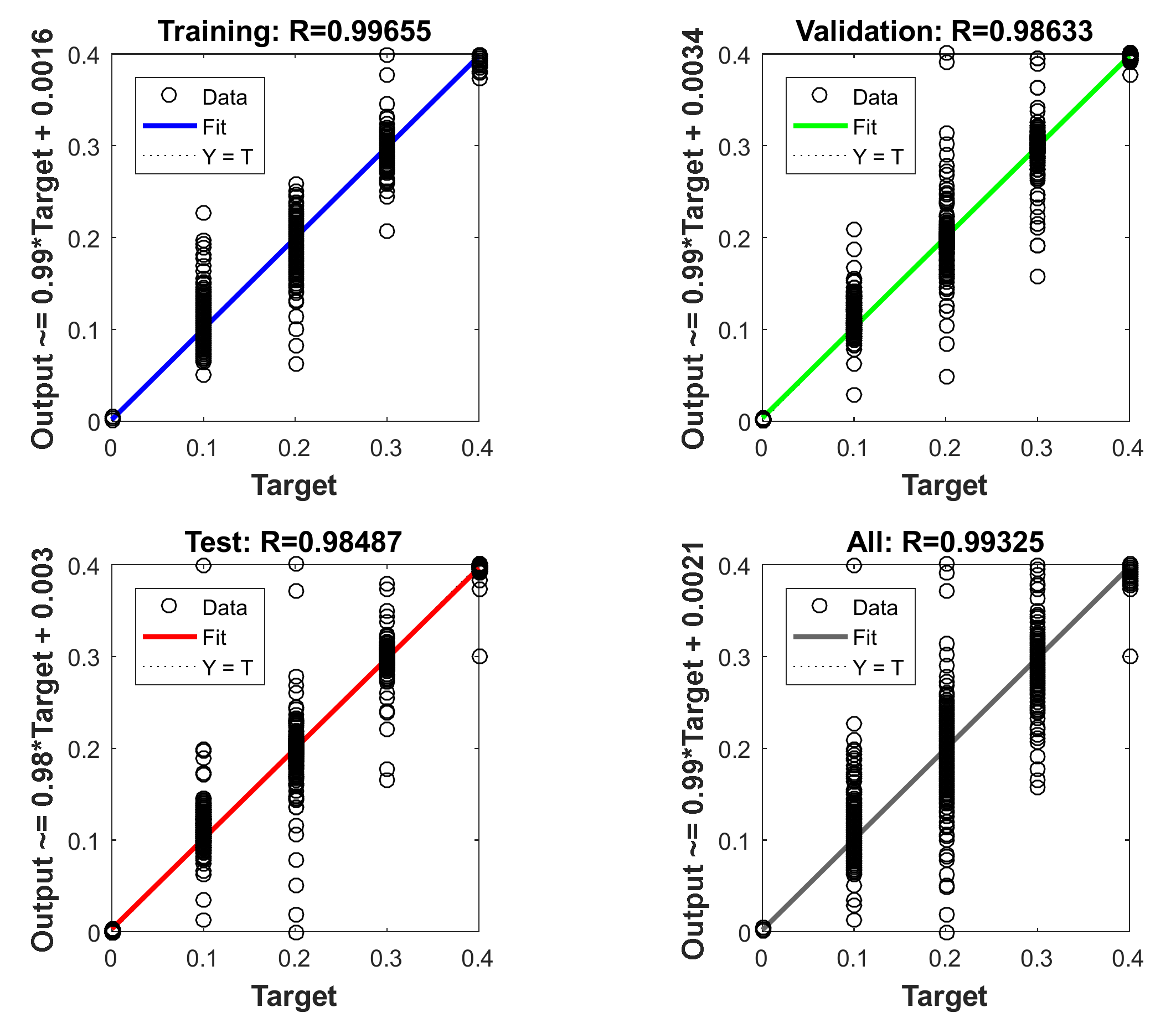
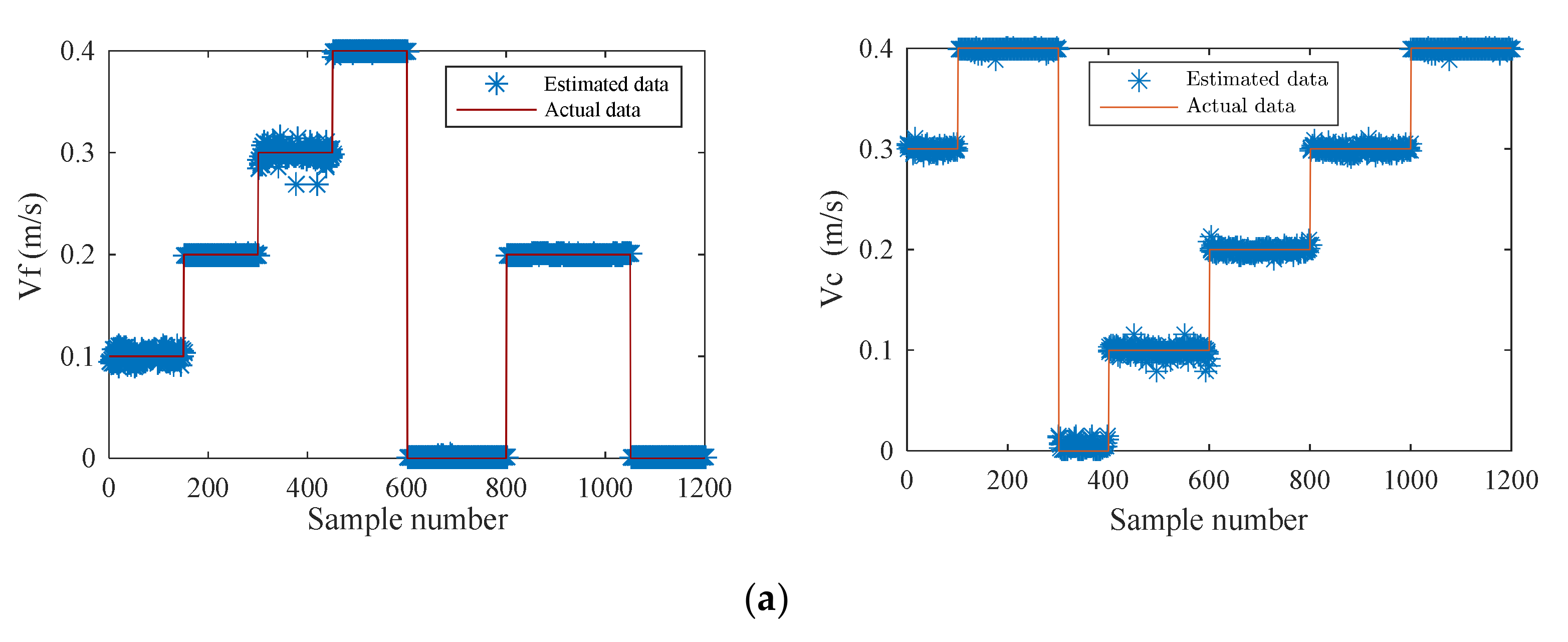
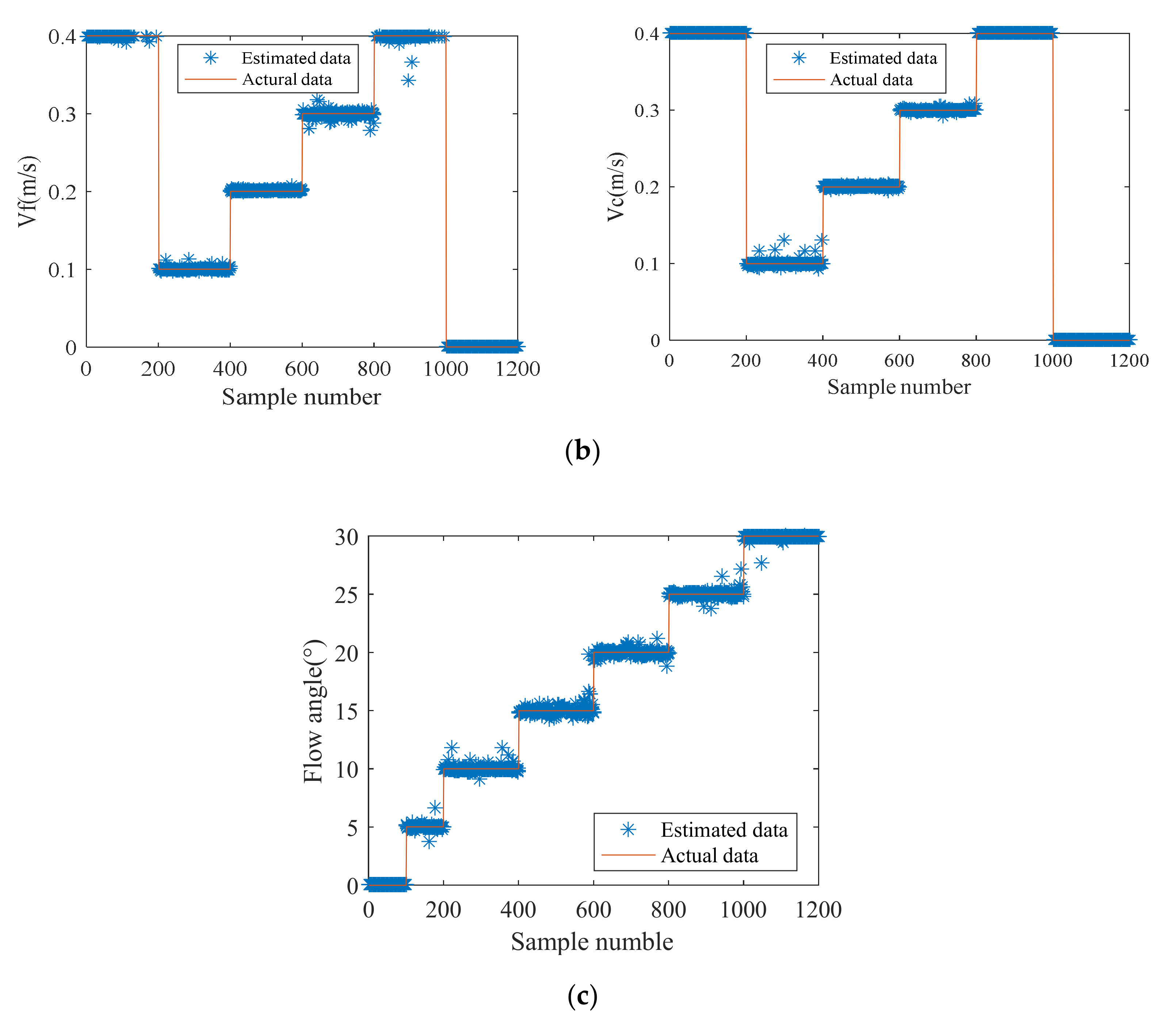
4.3. Estimating Flow Field with a Back Propagation (BP) Neural Network
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Wolf, B.J.; Morton, J.A.S.; MacPherson, W.N.; Van Netten, S.M. Bio-inspired all-optical artificial neuromast for 2D flow sensing. Bioinspiration Biomim. 2018, 13, 026013. [Google Scholar] [CrossRef] [PubMed]
- Chen, N.; Tucker, C.; Engel, J.M.; Yang, Y.; Pandya, S.; Liu, C. Design and Characterization of Artificial Haircell Sensor for Flow Sensing with Ultrahigh Velocity and Angular Sensitivity. J. Microelectromech. Syst. 2007, 16, 999–1014. [Google Scholar] [CrossRef]
- Liu, C. Micromachined biomimetic artificial haircell sensors. Bioinspiration Biomim. 2007, 2, S162–S169. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fan, Z.; Chen, J.; Zou, J.; Bullen, D.; Liu, C.; Delcomyn, F. Design and fabrication of artificial lateral line flow sensors. J. Micromech. Microeng. 2002, 12, 655–661. [Google Scholar] [CrossRef] [Green Version]
- Han, Z.; Liu, L.; Wang, K.; Song, H.; Chen, D.; Wang, Z.; Niu, S.; Zhang, J.; Ren, L. Artificial Hair-Like Sensors Inspired from Nature: A Review. J. Bionic Eng. 2018, 15, 409–434. [Google Scholar] [CrossRef]
- Izadi, N.; de Boer, M.J.; Berenschot, J.W.; Wiegerink, R.J.; Lammerink, T.S.; Jansen, H.V.; Krijnen, G.J. Fabrication Scheme for Dense Aquatic Flow Sensor Arrays; Verein Deutscher Ingenieure: Düsseldorf, Germany, 2017. [Google Scholar]
- Yang, Y.; Nguyen, N.; Chen, N.; Lockwood, M.; Tucker, C.; Hu, H.; Bleckmann, H.; Liu, C.; Jones, D.L. Artificial lateral line with biomimetic neuromasts to emulate fish sensing. Bioinspiration Biomim. 2010, 5, 16001. [Google Scholar] [CrossRef] [Green Version]
- Fu, J.; Jiang, Y.; Deyuan, Z. PVDF based artificial canal lateral line for underwater detection. IEEE Sens. 2015, 2016, 1–4. [Google Scholar]
- Gong, L.; Fu, J.; Ma, Z.; Deyuan, Z.; Jiang, Y. Canal-type artificial lateral line sensor array based on highly aligned P(VDF-TrFE) nanofibers. Annu. Int. Conf. Nano/Micro Eng. Mol. Syst. 2016, 2016, 423–426. [Google Scholar]
- Jiang, Y.; Ma, Z.; Fu, J.; Deyuan, Z. Development of a Flexible Artificial Lateral Line Canal System for Hydrodynamic Pressure Detection. Sensors 2017, 17, 1220. [Google Scholar] [CrossRef] [Green Version]
- Boulogne, L.H.; Wolf, B.J.; A Wiering, M.; Van Netten, S.M. Performance of neural networks for localizing moving objects with an artificial lateral line. Bioinspiration Biomim. 2017, 12, 056009. [Google Scholar] [CrossRef] [Green Version]
- Abdulsadda, A.; Tan, X. An artificial lateral line system using IPMC sensor arrays. Int. J. Smart Nano Mater. 2012, 3, 226–242. [Google Scholar] [CrossRef] [Green Version]
- Abdulsadda, A.; Tan, X. Localization of a moving dipole source underwater using an artificial lateral line. In Proceedings of the SPIE smart structures and materials + nondestructive evaluation and health monitoring conference, San Diego, CA, USA, 11–15 March 2012. [Google Scholar]
- Abdulsadda, A.; Tan, X. Nonlinear estimation-based dipole source localization for artificial lateral line systems. Bioinspiration Biomim. 2013, 8, 26005. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Abels, C.; Qualteri, A.; De Vittorio, M.; Megill, W.; Rizzi, F. A bio-inspired real-time capable artificial lateral line system for freestream flow measurements. Bioinspiration Biomim. 2016, 11, 35006. [Google Scholar] [CrossRef] [PubMed]
- Lin, X.; Wu, J.; Liu, N.; Wang, L. Numerical Simulation Research in Flow Fields Recognition Method Based on the Autonomous Underwater Vehicle. Form. Asp. Compon. Softw. 2017, 10462, 757–765. [Google Scholar]
- Salumäe, T.; Kruusmaa, M. Flow-relative control of an underwater robot. Proc. R. Soc. A Math. Phys. Eng. Sci. 2013, 469, 20120671. [Google Scholar] [CrossRef] [Green Version]
- Fukuda, S.; Tuhtan, J.; Fuentes-Pérez, J.F.; Schletterer, M.; Kruusmaa, M. Random Forests Hydrodynamic Flow Classification in a Vertical Slot Fishway Using a Bioinspired Artificial Lateral Line Probe. Comput. Vision 2016, 9835, 297–307. [Google Scholar]
- Chambers, L.D.; Akanyeti, O.; Venturelli, R.; Ježov, J.; Brown, J.; Kruusmaa, M.; Fiorini, P.; Megill, W. A fish perspective: Detecting flow features while moving using an artificial lateral line in steady and unsteady flow. J. R. Soc. Interface 2014, 11, 20140467. [Google Scholar] [CrossRef] [Green Version]
- Akanyeti, O.; Chambers, L.D.; Ježov, J.; Brown, J.; Venturelli, R.; Kruusmaa, M.; Megill, W.; Fiorini, P. Self-motion effects on hydrodynamic pressure sensing: Part I. Forward–backward motion. Bioinspiration Biomim. 2013, 8, 26001. [Google Scholar] [CrossRef]
- Chen, K.; Tuhtan, J.A.; Fuentes-Pérez, J.F.; Toming, G.; Musall, M.; Strokina, N.; Kamarainen, J.-K.; Kruusmaa, M. Estimation of Flow Turbulence Metrics With a Lateral Line Probe and Regression. IEEE Trans. Instrum. Meas. 2017, 66, 651–660. [Google Scholar] [CrossRef]
- Yen, W.-K.; Guo, J. Wall following control of a robotic fish using dynamic pressure. In Oceans; IEEE: Piscataway, NJ, USA, 2016; pp. 1–7. [Google Scholar]
- Wang, W.; Li, Y.; Zhang, X.; Wang, C.; Chen, S.; Xie, G. Speed evaluation of a freely swimming robotic fish with an artificial lateral line. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 4737–4742. [Google Scholar]
- Zheng, X.; Wang, C.; Fan, R.; Xie, G. Artificial lateral line based local sensing between two adjacent robotic fish. Bioinspiration Biomim. 2017, 13, 016002. [Google Scholar] [CrossRef]
- Venturelli, R.; Akanyeti, O.; Visentin, F.; Ježov, J.; Chambers, L.D.; Toming, G.; Brown, J.; Kruusmaa, M.; Megill, W.; Fiorini, P. Hydrodynamic pressure sensing with an artificial lateral line in steady and unsteady flows. Bioinspiration Biomim. 2012, 7, 36004. [Google Scholar] [CrossRef] [PubMed]
- Wissman, J.; Sampath, K.; Freeman, S.E.; Rohde, C.A. Capacitive Bio-Inspired Flow Sensing Cupula. Sensors 2019, 19, 2639. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, G.; Wang, M.; Wang, A.; Wang, S.; Yang, T.; Malekian, R.; Li, Z. Research on Flow Field Perception Based on Artificial Lateral Line Sensor System. Sensors 2018, 18, 838. [Google Scholar] [CrossRef] [Green Version]
- Clancy, L.J. Aerodynamics; Wiley Press: New York, NY, USA, 1975; ISBN 978-0-470-15837-1. [Google Scholar]
- Batchelor, G.K. An Introduction to Fluid Dynamics; Cambridge University Press (CUP): Cambridge, UK, 2000. [Google Scholar]
- Sun, Y.-J.; Zhang, S.; Miao, C.-X.; Li, J.-M. Improved BP Neural Network for Transformer Fault Diagnosis. J. China Univ. Min. Technol. 2007, 17, 138–142. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mesh | |||
| Fluid Dimensions | Global Element Scale Factor | Global Element Seed Size | Other Grid Sizes |
| 3 m × 1 m | 1 | 100 mm | 15 mm |
| Carrier Boundary | |||
| The maximum size | Height of the first layer | Height ratio | The number of boundary layer |
| 0.5 mm | 0.01 mm | 1.2 | 8 |
| Spring Smoothing | |||
| Spring constant factor | Convergence tolerance | Number of iterations | Elements |
| 0.8 | 0.001 | 20 | tri in tri zones |
| Re-meshing | |||
| Maximum cell skewness | Maximum/minimum length scale | Sizing function | Resolution, variation, rate |
| 0.7 | default values | used in local grids | default values |
| Computational Fluid Domain Material | |||
| Type | Material Name | Density | Viscosity |
| Incompressible Fluid | Water (liquid) | 998.2 kg/m3 | 0.001003 kg/m∙s |
| Hydrodynamic Simulation | |||
| Physical model | Boundary conditions | Reynolds number | Separation algorithm |
| Renormalization Group (RNG) k-ε | Velocity inlet/pressure outlet | >38,000 | PISO (Pressure Implicit Split Operator) |
| Project | Parameters |
| Carrier size | D = 160 mm, L = 378 mm |
| Carrier material | Nylon and photosensitive resin |
| Sensor type | MS5803-07BA |
| Main control chip | STM32F103ZET6 |
| Power supply module | 3 × 3.7 V lithium battery |
| Switch | Watertight switch |
| Points | 1 | 6 | 10 | 18 |
|---|---|---|---|---|
| a0 | 1.105 × 104 | −122.4 | −496.9 | −54.41 |
| a1 | −1.101 × 104 | 98.99 | 450.8 | 41.39 |
| a2 | 989 | −2.714 | −85.62 | −2.641 |
| w | 0.5408 | 4.823 | 3.245 | 5.093 |
| R-squared | 1 | 0.9999 | 1 | 1 |
| Points | 9–8 | 11–10 | 13–12 | 15–14 |
|---|---|---|---|---|
| p1 | −0.188 | −0.202 | −0.1694 | −0.08355 |
| p2 | 20.77 | 19.47 | 14.82 | 7.959 |
| p3 | −7.428 | −4.877 | −5.635 | −2.542 |
| R-squared | 0.9961 | 0.9968 | 0.9989 | 0.9984 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, G.; Hao, H.; Yang, T.; Liu, S.; Wang, M.; Incecik, A.; Li, Z. Flow Field Perception of a Moving Carrier Based on an Artificial Lateral Line System. Sensors 2020, 20, 1512. https://doi.org/10.3390/s20051512
Liu G, Hao H, Yang T, Liu S, Wang M, Incecik A, Li Z. Flow Field Perception of a Moving Carrier Based on an Artificial Lateral Line System. Sensors. 2020; 20(5):1512. https://doi.org/10.3390/s20051512
Chicago/Turabian StyleLiu, Guijie, Huanhuan Hao, Tingting Yang, Shuikuan Liu, Mengmeng Wang, Atilla Incecik, and Zhixiong Li. 2020. "Flow Field Perception of a Moving Carrier Based on an Artificial Lateral Line System" Sensors 20, no. 5: 1512. https://doi.org/10.3390/s20051512