In-Field Calibration of Triaxial Accelerometer Based on Beetle Swarm Antenna Search Algorithm


Abstract
:1. Introduction
2. Related Works of BSAS Algorithm
2.1. Beetle Antennae Search Algorithm
| Algorithm 1 BAS algorithm |
Input: Define cost function . Set the dimension of parameters to be optimized as n. Output: Optimal solution and .
|
2.2. Beetle Swarm Antenna Search Algorithm
| Algorithm 2 BSAS algorithm |
Input: Define cost function . Set the dimension of parameters to be optimized as n. Output: Optimal solution and .
|
3. Methodology
3.1. Calibration Model of Triaxial Accelerometer
3.2. Cost Function
3.3. Scheme of Optimal Measuring Position
3.4. Calibration Procedures Based on BSAS Algorithm
- Because of the unique step size update strategy in BSAS algorithm, it requires that different parameters which need to be optimized should have similar magnitude, otherwise the optimization results will be affected.
- Relevant research shows that different calibration parameters have different degrees of influence on the cost function, which means that different calibration parameters have different effects on calibration accuracy [5].
- Step 1:
- The optimization of scale factors is implemented by using BSAS algorithm. In order to avoid the influence of the other three types of calibration parameters on the results, the biases, the installation angle errors, and the second-order nonlinear scale factors need to be initialized in advance.
- Step 2:
- The biases are optimized based on the BSAS algorithm. In the initialization phase, the installation angle errors and the second-order nonlinear scale factors are preseted, while the scale factors are set to the optimization result in Step 1.
- Step 3:
- First, the optimization results of the scale factors and the biases are used as preset values, and then the installation angle errors are optimized after initializing the second-order nonlinear scale factors.
- Step 4:
- Optimization of the second-order nonlinear scale factors is performed by BSAS algorithm, and the optimization results of the first three types of calibration parameters will be loaded in advance in the initialization stage.
4. Simulation and Analysis
4.1. Simulation Environment
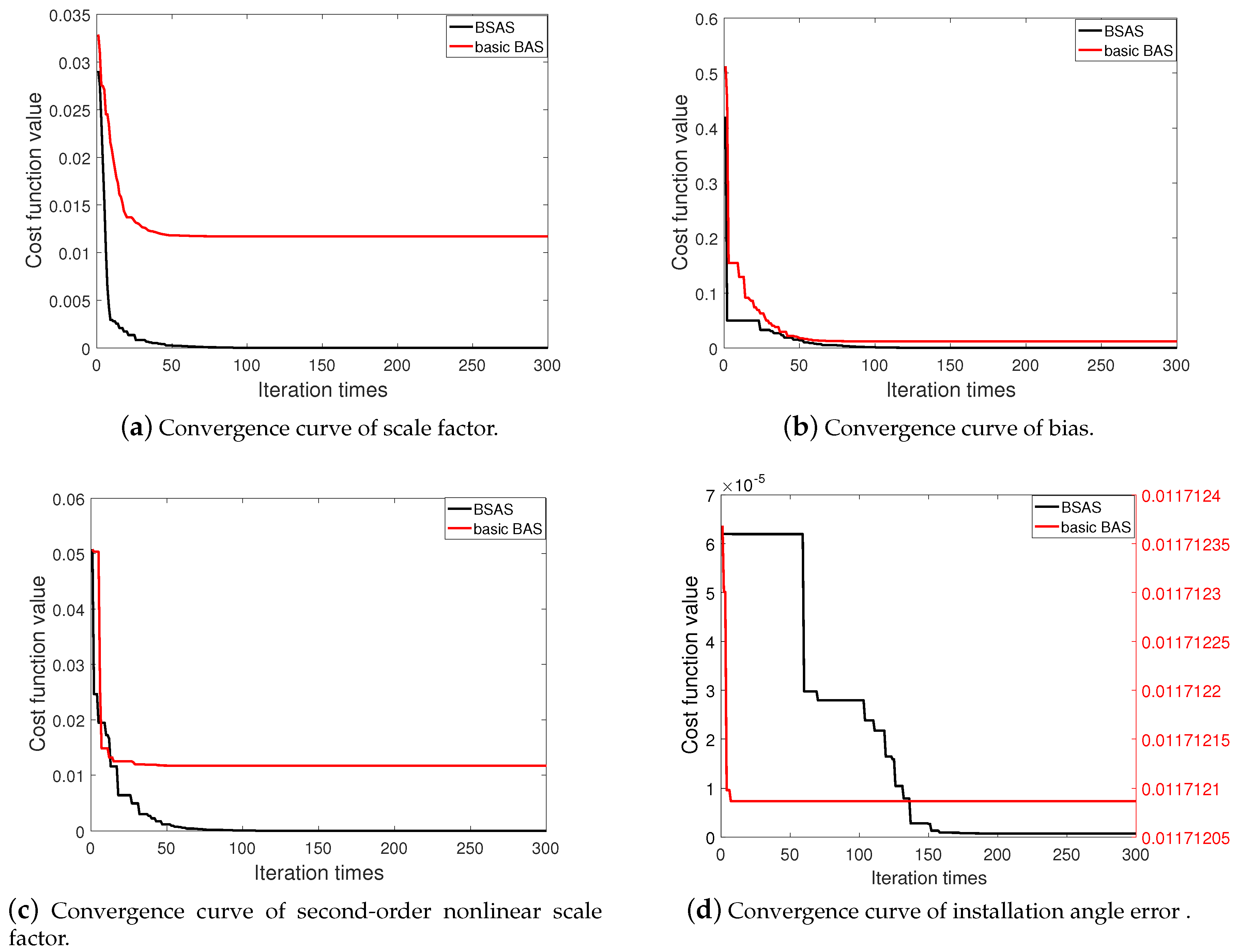
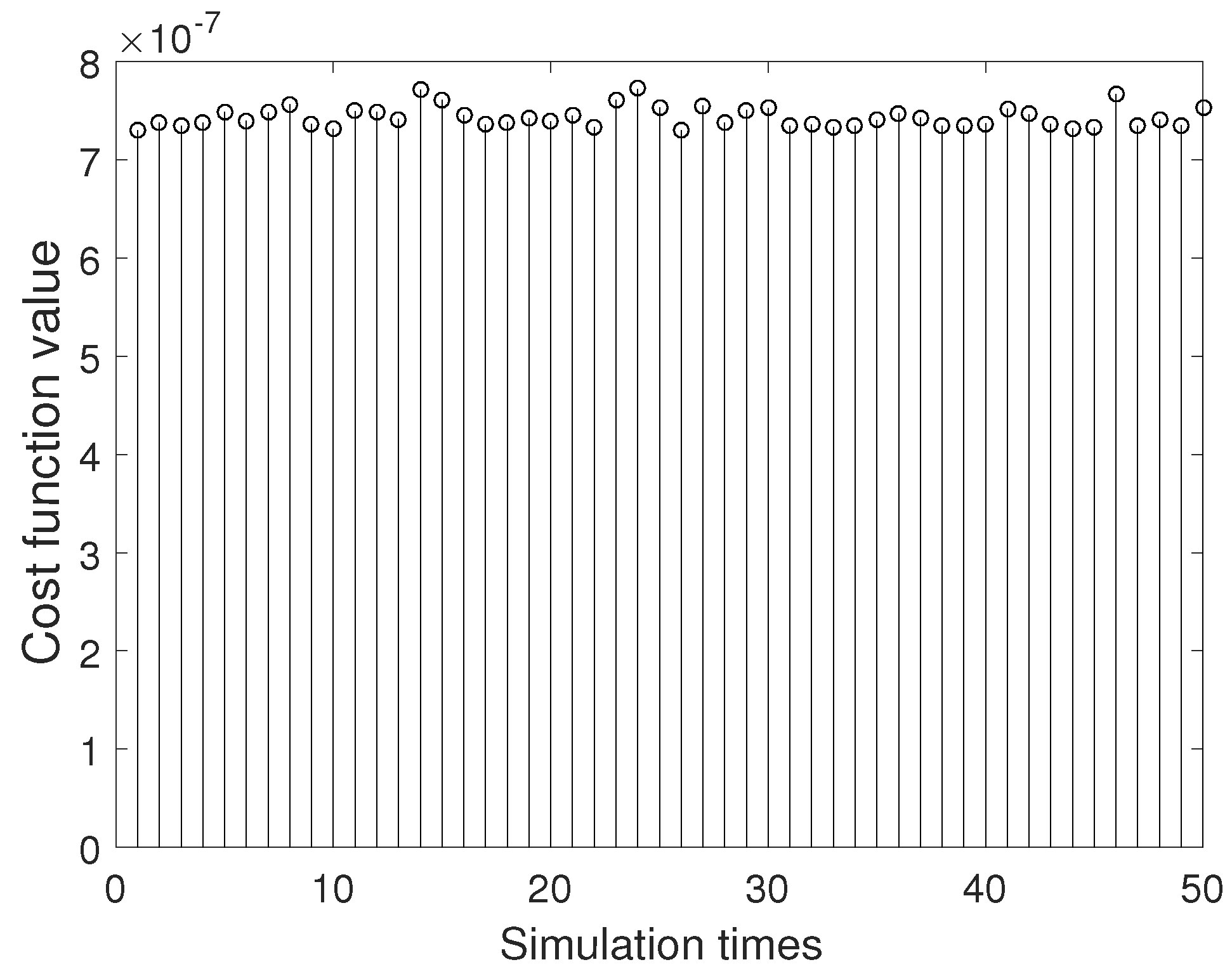
4.2. Simulation Results and Analysis
5. Experimental Analysis
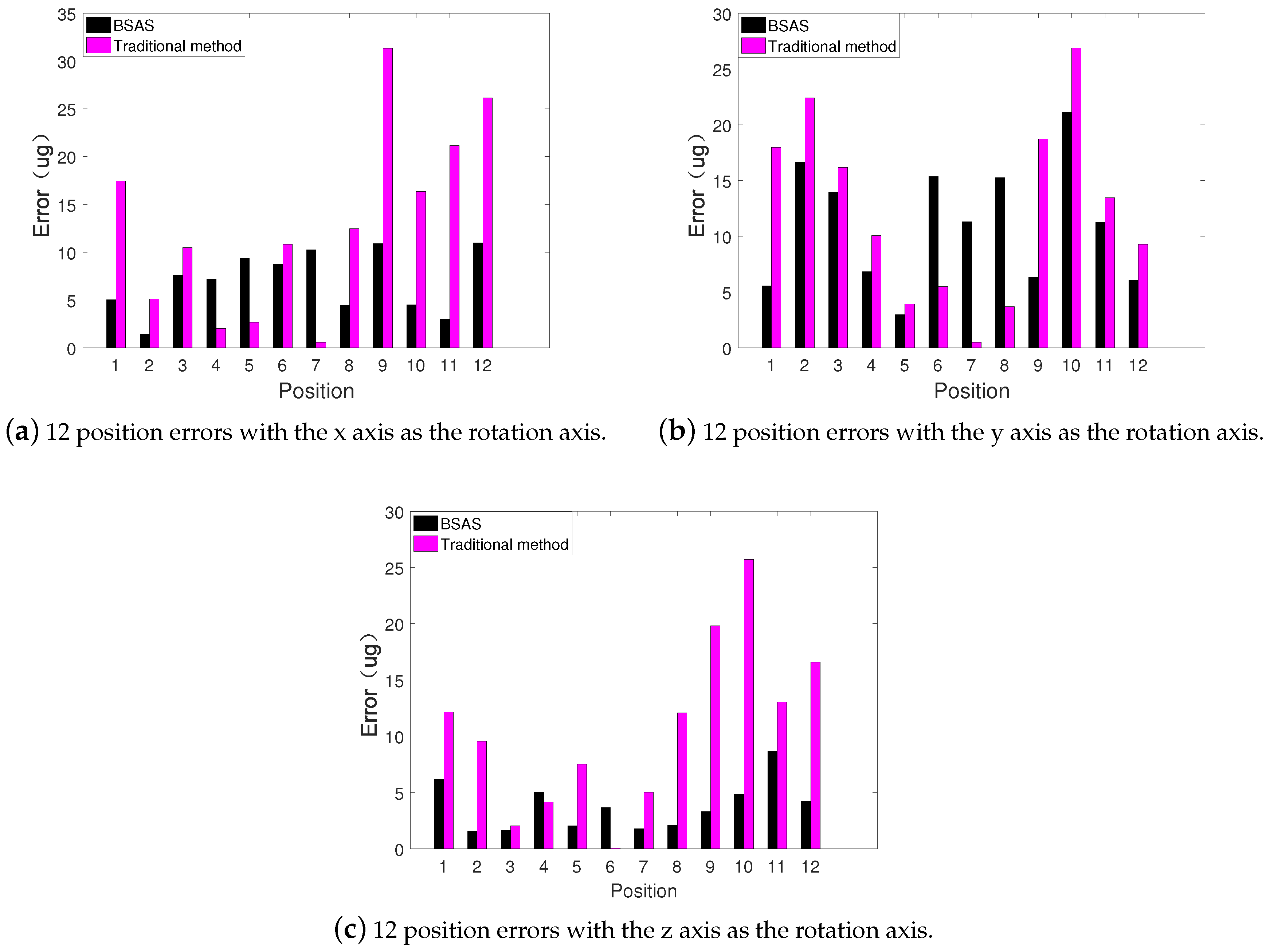
5.1. 36 Position Measurement Experiment
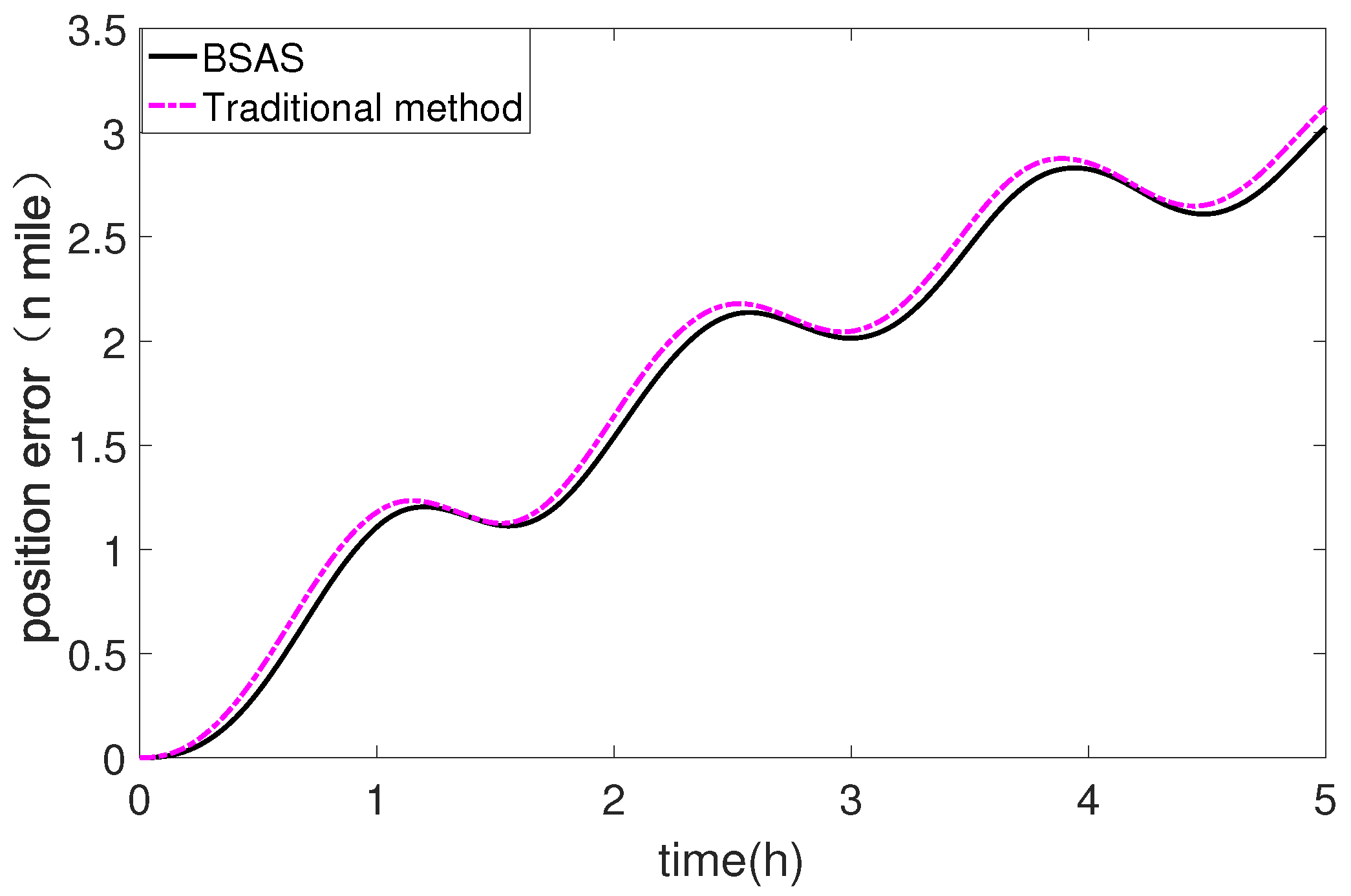
5.2. Static Navigation Experiment Based on SINS
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Xiong, H.; Tang, J.; Xu, H.; Zhang, W.; Du, Z. A robust single GPS navigation and positioning algorithm based on strong tracking filtering. IEEE Sens. J. 2017, 18, 290–298. [Google Scholar] [CrossRef]
- Liu, J.; Pu, J.; Sun, L.; He, Z. An Approach to Robust INS/UWB Integrated Positioning for Autonomous Indoor Mobile Robots. Sensors 2019, 19, 950. [Google Scholar] [CrossRef] [Green Version]
- Gross, J.N.; Gu, Y.; Rhudy, M.B. Robust UAV relative navigation with DGPS, INS, and peer-to-peer radio ranging. IEEE Trans. Autom. Sci. Eng. 2015, 12, 935–944. [Google Scholar] [CrossRef]
- Zhang, T.; Chen, L.; Li, Y. AUV underwater positioning algorithm based on interactive assistance of SINS and LBL. Sensors 2016, 16, 42. [Google Scholar] [CrossRef] [Green Version]
- Titterton, D.; Weston, J.L.; Weston, J. Strapdown Inertial Navigation Technology; IET: London, UK, 2004. [Google Scholar]
- Fontanella, R.; Accardo, D.; Moriello, R.S.L.; Angrisani, L.; De Simone, D. MEMS gyros temperature calibration through artificial neural networks. Sens. Actuators Al 2018, 279, 553–565. [Google Scholar] [CrossRef]
- Cao, H.; Zhang, Y.; Shen, C.; Liu, Y.; Wang, X. Temperature energy influence compensation for MEMS vibration gyroscope based on RBF NN-GA-KF method. Shock. Vib. 2018, 2018, 1–10. [Google Scholar] [CrossRef]
- Poddar, S.; Kumar, V.; Kumar, A. A comprehensive overview of inertial sensor calibration techniques. J. Dyn. Syst. Meas. Contr. 2017, 139, 011006. [Google Scholar] [CrossRef]
- Bonnet, S.; Bassompierre, C.; Godin, C.; Lesecq, S.; Barraud, A. Calibration methods for inertial and magnetic sensors. Sens. Actuators A 2009, 156, 302–311. [Google Scholar] [CrossRef]
- Ferraris, F.; Grimaldi, U.; Parvis, M. Procedure for effortless in-field calibration of three-axis rate gyros and accelerometers. Sens. Mater. 1995, 7, 311–330. [Google Scholar]
- Shin, E.H.; El-Sheimy, N. A new calibration method for strapdown inertial navigation systems. ZFV 2002, 127, 1–10. [Google Scholar]
- Syed, Z.F.; Aggarwal, P.; Goodall, C.; Niu, X.; El-Sheimy, N. A new multi-position calibration method for MEMS inertial navigation systems. Meas. Sci. Technol. 2007, 18, 1897. [Google Scholar] [CrossRef]
- Won, S.h.P.; Golnaraghi, F. A triaxial accelerometer calibration method using a mathematical model. IEEE Trans. Instrum. Meas. 2009, 59, 2144–2153. [Google Scholar] [CrossRef]
- Cai, Q.; Song, N.; Yang, G.; Liu, Y. Accelerometer calibration with nonlinear scale factor based on multi-position observation. Meas. Sci. Technol. 2013, 24, 105002. [Google Scholar] [CrossRef]
- Ye, L.; Guo, Y.; Su, S.W. An efficient autocalibration method for triaxial accelerometer. IEEE Trans. Instrum. Meas. 2017, 66, 2380–2390. [Google Scholar] [CrossRef]
- Wang, Z.; Cheng, X.; Fu, J. Optimized Multi-Position Calibration Method with Nonlinear Scale Factor for Inertial Measurement Units. Sensors 2019, 19, 3568. [Google Scholar] [CrossRef] [Green Version]
- Chen, D.; Li, S. New super-twisting zeroing neural-dynamics model for tracking control of parallel robots: A finite-time and robust solution. IEEE Trans. Cybern. 2019, 1–10. [Google Scholar] [CrossRef]
- Chen, D.; Li, S. New disturbance rejection constraint for redundant robot manipulators: An optimization perspective. IEEE Trans. Ind. Inf. 2019, 16, 2221–2232. [Google Scholar] [CrossRef]
- Jiang, X.; Li, S. BAS: beetle antennae search algorithm for optimization problems. arXiv 2017, arXiv:1710.10724. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, S.; Xu, B. Convergence analysis of beetle antennae search algorithm and its applications. arXiv 2019, arXiv:1904.02397. [Google Scholar]
- Wu, Q.; Shen, X.; Jin, Y.; Chen, Z.; Li, S.; Khan, A.H.; Chen, D. Intelligent beetle antennae search for UAV sensing and avoidance of obstacles. Sensors 2019, 19, 1758. [Google Scholar] [CrossRef] [Green Version]
- Fei, S.W.; He, C.X. Prediction of dissolved gases content in power transformer oil using BASA-based mixed kernel RVR model. Int. J. Green Energy 2019, 16, 652–656. [Google Scholar] [CrossRef]
- Wu, Q.; Ma, Z.; Xu, G.; Li, S.; Chen, D. A Novel Neural Network Classifier Using Beetle Antennae Search Algorithm for Pattern Classification. IEEE Access 2019, 7, 64686–64696. [Google Scholar] [CrossRef]
- Fan, Y.; Shao, J.; Sun, G. Optimized PID Controller Based on Beetle Antennae Search Algorithm for Electro-Hydraulic Position Servo Control System. Sensors 2019, 19, 2727. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, Q.; Wang, Z.; Wei, A. Research on Optimal Scheduling of Wind-PV-Hydro-Storage Power Complementary System Based on BAS Algorithm. MSE 2019, 490, 072059. [Google Scholar] [CrossRef]
- Chen, C.; Tello Ruiz, M.; Lataire, E.; Delefortrie, G.; Mansuy, M.; Mei, T.; Vantorre, M. Ship manoeuvring model parameter identification using intelligent machine learning method and the beetle antennae search algorithm. In Proceedings of the ASME 2019 38th International Conference on Ocean, Offshore and Arctic Engineering, Scotland, UK, 9–14 June 2019. [Google Scholar]
- Sun, Y.; Zhang, J.; Li, G.; Wang, Y.; Sun, J.; Jiang, C. Optimized neural network using beetle antennae search for predicting the unconfined compressive strength of jet grouting coalcretes. Int. J. Numer. Anal. Methods Geomech. 2019, 43, 801–813. [Google Scholar] [CrossRef]
- Wang, J.; Chen, H.; Yuan, Y.; Huang, Y. A novel efficient optimization algorithm for parameter estimation of building thermal dynamic models. Build. Environ. 2019, 153, 233–240. [Google Scholar] [CrossRef]
- Wang, J.; Chen, H. BSAS: Beetle Swarm Antennae Search Algorithm for Optimization Problems. arXiv 2018, arXiv:1807.10470. [Google Scholar]
- Xie, S.; Garofano, V.; Chu, X.; Negenborn, R.R. Model predictive ship collision avoidance based on Q-learning beetle swarm antenna search and neural networks. Ocean Eng. 2019, 193, 106609. [Google Scholar] [CrossRef]
- Lin, X.; Liu, Y.; Wang, Y. Design and Research of DC Motor Speed Control System Based on Improved BAS. In Proceedings of the 2018 Chinese Automation Congress (CAC), Xi’an, China, 30 November–2 December 2018; pp. 3701–3705. [Google Scholar]
- Rong, T.; Shen, C.; Yuan, Z. The Principle of Measuring the Displacement with Accelerometer and the Error Analysis. J. Huazhong Univ. Sci. Techno. 2000, 28, 58–60. [Google Scholar]
- Särkkä, O.; Nieminen, T.; Suuriniemi, S.; Kettunen, L. A multi-position calibration method for consumer-grade accelerometers, gyroscopes, and magnetometers to field conditions. IEEE Sens. J. 2017, 17, 3470–3481. [Google Scholar] [CrossRef]
- Yang, J.; Wu, W.; Wu, Y.; Lian, J. Thermal calibration for the accelerometer triad based on the sequential multiposition observation. IEEE Trans. Instrum. Meas. 2012, 62, 467–482. [Google Scholar] [CrossRef]
- A multi-position self-calibration method for dual-axis rotational inertial navigation system. Sens. Actuators Al 2014, 219, 24–31. [CrossRef]
- Hussain, K.; Salleh, M.N.M.; Cheng, S.; Shi, Y. Metaheuristic research: A comprehensive survey. Artif. Intell. Rev. 2019, 52, 2191–2233. [Google Scholar] [CrossRef] [Green Version]
- Tan, C.W.; Park, S. Design of accelerometer-based inertial navigation systems. IEEE Trans. Instrum. Meas. 2005, 54, 2520–2530. [Google Scholar] [CrossRef]
- El-Diasty, M.; Pagiatakis, S. Calibration and stochastic modelling of inertial navigation sensor errors. JGPS 2008, 7, 170–182. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Real Values |
|---|---|
| , , (plus/(m/s)) | −734.949141, −738.738914, −714.409875 |
| , , (m/s) | 0.00654668, −0.04285332, 0.01471738 |
| , , | 0.00050230, 0.00068317, −0.00048500 |
| , , (deg) | −0.00035363, 0.00023193, −0.00003365 |
| , , (plus/(m/s)) | 0.003654, 0.000644, −0.002654 |
| Beetles Numbers (m) | Position Update Probability Constant () | Step Size Update Probability Constant () | Maximum Number of Invalid Searches () |
| 10 | 0.8 | 0.8 | 2 |
| Searching Step Size () | Attenuation Coefficient of Step Size () | Searching Distance () | Attenuation Coefficient of Searching Distance () |
| 0.98 | 0.9 | 2 | 0.9 |
| BSAS | Basic BAS | ||||||
|---|---|---|---|---|---|---|---|
| Paramters | Real Values | Mean | RMSE | SD | Mean | RMSE | SD |
| (plus/(m/s)) | −734.949141 | −734.949176 | −737.770451 | 2.9442 | 0.8418 | ||
| (plus/(m/s) | −738.738914 | −738.738963 | −735.325275 | 3.4575 | 0.5493 | ||
| (plus/(m/s) | −714.409875 | −714.409849 | −716.269090 | 2.0935 | 0.9624 | ||
| (m/s) | 0.00654667 | 0.00654670 | 0.00670143 | 0.002 | 0.002 | ||
| (m/s) | −0.04285331 | −0.04285266 | −0.04287217 | 0.00012 | 0.00012 | ||
| (m/s) | 0.01471738 | 0.01471718 | 0.01479223 | 0.0021 | 0.0021 | ||
| (deg) | 0.00050230 | 0.00050739 | - | - | - | ||
| (deg) | 0.00068317 | 0.00064748 | - | - | - | ||
| (deg) | −0.00048500 | −0.00049006 | - | - | - | ||
| (deg) | −0.00035363 | −0.00035271 | −0.00030826 | ||||
| (deg) | 0.00023193 | 0.00026761 | - | - | - | ||
| (deg) | −0.00003365 | −0.00003447 | - | - | - | ||
| plus/(m/s) | 0.003654 | 0.003653 | −0.013728 | 0.0607 | 0.0582 | ||
| plus/(m/s) | 0.000644 | 0.000643 | 0.000734 | 0.0016 | 0.0017 | ||
| plus/(m/s) | −0.002654 | −0.002655 | −0.040289 | 0.0614 | 0.0485 | ||
| Parameter Item | Parameter Values |
|---|---|
| Accelerometer constant bias (g) | 10 |
| Accelerometer dynamic range (g) | |
| Gyro constant bias (/h) | 0.01 |
| Method | Mean Value of Error (ug) | Standard Deviation of Error (ug) |
|---|---|---|
| Traditional method | 12.025 | 8.296 |
| Proposed method | 7.253 | 4.786 |
| Method | Maximum Error (nmile) | Mean Value of Error (nmile) |
|---|---|---|
| Traditional method | 3.1229 | 1.8165 |
| Proposed method | 3.0273 | 1.7583 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, P.; Gao, Y.; Wu, M.; Zhang, F.; Li, G. In-Field Calibration of Triaxial Accelerometer Based on Beetle Swarm Antenna Search Algorithm. Sensors 2020, 20, 947. https://doi.org/10.3390/s20030947
Wang P, Gao Y, Wu M, Zhang F, Li G. In-Field Calibration of Triaxial Accelerometer Based on Beetle Swarm Antenna Search Algorithm. Sensors. 2020; 20(3):947. https://doi.org/10.3390/s20030947
Chicago/Turabian StyleWang, Pengfei, Yanbin Gao, Menghao Wu, Fan Zhang, and Guangchun Li. 2020. "In-Field Calibration of Triaxial Accelerometer Based on Beetle Swarm Antenna Search Algorithm" Sensors 20, no. 3: 947. https://doi.org/10.3390/s20030947