Interference Torque of a Gas-Dynamic Bearing Gyroscope Subject to a Uniform Change of the Specific Force and the Carrier Angular Velocity

Abstract
:1. Introduction
2. Mechanical Model
3. Mathematical Model
3.1. Governing Equations
3.2. Numerical Method
4. Results and Discussion
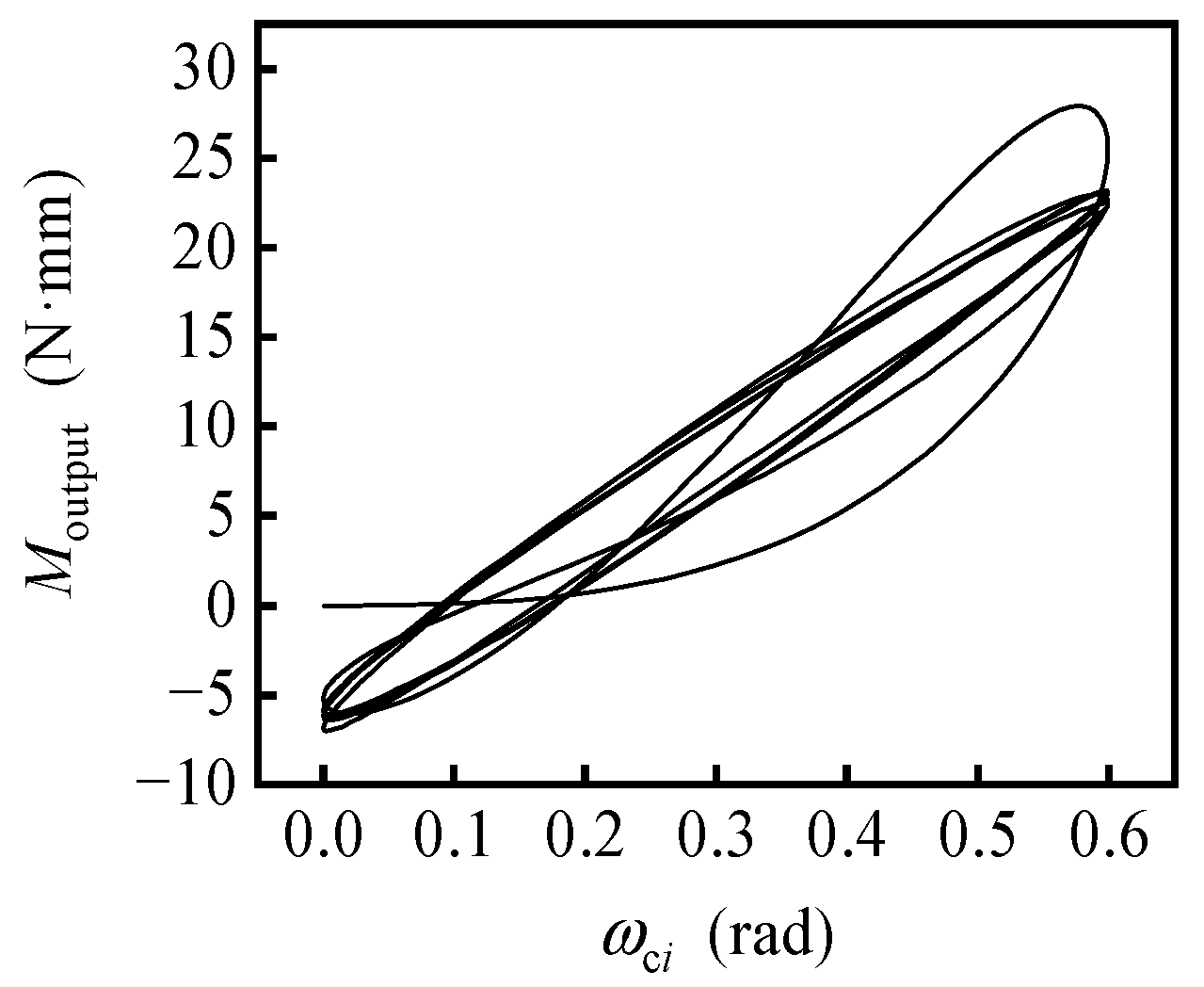
4.1. Hysteresis Loops of the Gas-Dynamic Bearings
4.2. Response with Uniformly Changed Specific Force
4.3. Response with Uniformly Changed Angular Velocity
4.4. Response with Uniformly Changed Specific Force and Angular Velocity
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Feng, K.; Huang, Z.; Guo, Z. Design of spherical spiral groove bearings for a high-speed air-lubricated gyroscope. Tribol. Trans. 2015, 58, 1084–1095. [Google Scholar] [CrossRef]
- Sun, B.Q.; Wang, S.Y.; Li, H.; He, X. Decoupling control of micromachined spinning-rotor gyroscope with electrostatic suspension. Sensors 2016, 16, 1747. [Google Scholar] [CrossRef] [Green Version]
- Ren, T.; Feng, M.; Hu, M.; Liu, Z. Influence of machining errors on stiffness of hydrodynamic gas bearing in gyroscope motor. J. Chin. Inert. Technol. 2019, 27, 378–383. [Google Scholar]
- Golikov, A.N.; Ignatovskaya, A.A. The statement of design and application questions for the gyroscope with a gas-dynamic suspension of ball rotor in the navigation support drill system. J. Phys. Conf. Ser. 2016, 671, 012020. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Zhang, D.; Duan, F. Dynamic characteristics of opposed-conical gas-dynamic bearings. Ind. Lubr. Tribol. 2020, 72, 415–425. [Google Scholar] [CrossRef]
- Chen, D.; Liu, X.; Zhang, H.; Li, H.; Weng, R.; Li, L.; Rong, W.; Zhang, Z. A rotational gyroscope with a water-film bearing based on magnetic self-restoring effect. Sensors 2018, 18, 415. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Duan, F.; Fan, L.; Yan, Y. Static error model of a three-floated gyroscope with a rotor supported on gas-lubricated bearings. Proc. Inst. Mech. Eng. Part. C J. Eng. Mech. Eng. Sci. 2017, 232, 2850–2860. [Google Scholar] [CrossRef]
- Li, Y.; Duan, F. Interference torque of a three-floated gyroscope with gas-lubricated bearings subject to a sudden change of the specific force. Chin. J. Aeronaut. 2019, 32, 737–747. [Google Scholar] [CrossRef]
- Duijnhouwer, F.; Nijmeijer, H. Modelling and simulation of a compliant tilting pad air bearing. Proc. Inst. Mech. Eng. Part. C J. Eng. Mech. Eng. Sci. 2014, 230, 69–87. [Google Scholar] [CrossRef]
- Meybodi, R.R.; Mohammadi, A.K.; Bakhtiari-Nejad, F. Numerical analysis of a rigid rotor supported by aerodynamic four-lobe journal bearing system with mass unbalance. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 454–471. [Google Scholar] [CrossRef]
- Chen, C. Structure Performance Analysis of High Speed Aerobearing and Its Experiment Research. Ph.D. Thesis, Chinese Academy of Sciences, Beijing, China, 2014. [Google Scholar]
- Bonello, P.; Pham, H.M. The efficient computation of the nonlinear dynamic response of a foil-air bearing rotor system. J. Sound Vibr. 2014, 333, 3459–3478. [Google Scholar] [CrossRef]
- Bonello, P.; Bin Hassan, M.F. An experimental and theoretical analysis of a foil-air bearing rotor system. J. Sound Vibr. 2018, 413, 395–420. [Google Scholar] [CrossRef] [Green Version]
- Groves, K.H.; Bonello, P.; Hai, P.M. Efficient dynamic analysis of a whole aeroengine using identified nonlinear bearing models. Proc. Inst. Mech. Eng. Part. C J. Eng. Mech. Eng. Sci. 2012, 226, 66–81. [Google Scholar] [CrossRef]
- Kim, D.; Lee, S.; Bryant, M.D.; Ling, F.F. Hydrodynamic performance of gas microbearings. J. Tribol. Trans. ASME 2004, 126, 711–718. [Google Scholar] [CrossRef]
- Pronobis, T.; Liebich, R. Comparison of stability limits obtained by time integration and perturbation approach for gas foil bearings. J. Sound Vibr. 2019, 458, 497–509. [Google Scholar] [CrossRef]
- Du, J.; Yang, G.; Ge, W.; Liu, T. Nonlinear dynamic analysis of a rigid rotor supported by a spiral-grooved opposed-hemisphere gas bearing. Tribol. Trans. 2016, 59, 781–800. [Google Scholar] [CrossRef]
- Wang, C. Application of a hybrid method to the nonlinear dynamic analysis of a flexible rotor supported by a spherical gas-lubricated bearing system. Nonlinear Anal. Theory Methods Appl. 2009, 70, 2035–2053. [Google Scholar] [CrossRef]
- Nielsen, B.B.; Santos, I.F. Transient and steady state behaviour of elasto–aerodynamic air foil bearings, considering bump foil compliance and top foil inertia and flexibility: A numerical investigation. Proc. Inst. Mech. Eng. Part. J J. Eng. Tribol. 2017, 231, 1235–1253. [Google Scholar] [CrossRef]
- Nielsen, B.B. Combining Gas Bearing and Smart Material Technologies for Improved Machine Performance Theory and Experiment. Ph.D. Thesis, Technical University of Denmark, Lyngby, Denmark, 2017. [Google Scholar]
- Liu, W.H.; Battig, P.; Wagner, P.H.; Schiffmann, J. Nonlinear study on a rigid rotor supported by herringbone grooved gas bearings: Theory and validation. Mech. Syst. Signal Proc. 2020, 146, 106983. [Google Scholar] [CrossRef]
- Zhang, X.Q.; Wang, X.L.; Si, L.N.; Liu, Y.-D.; Shi, W.-T.; Xiong, G.-J. Effects of temperature on nonlinear dynamic behavior of gas journal bearing-rotor systems for microengine. Tribol. Trans. 2016, 59, 944–956. [Google Scholar] [CrossRef]
- Wang, C.C. Non-periodic and chaotic response of three-multilobe air bearing system. In Proceedings of the 1st International Conference on Computing and Precision Engineering (ICCPE), Nantou, Taiwan, 27–30 November 2015; Elsevier Science Inc.: New York, NY, USA, 2017. [Google Scholar]
- Hassini, M.A.; Arghir, M. A simplified and consistent nonlinear transient analysis method for gas bearing: Extension to flexible rotors. J. Eng. Gas Turbines Power Trans. ASME 2014, 137, 7–19. [Google Scholar]
- Bouzidane, A.; Thomas, M. Nonlinear dynamic analysis of a rigid rotor supported by a three-pad hydrostatic squeeze film dampers. Tribol. Trans. 2013, 56, 717–727. [Google Scholar] [CrossRef]
- Zhang, G.H.; Liu, Z.X.; Kang, W.J.; Liu, Z.-S.; Xin, T. Nonlinear dynamic characteristics of rotating ramjet rotor supported by hybrid gas bearing. Proc. Inst. Mech. Eng. Part. G J. Aerosp. Eng. 2014, 228, 115–136. [Google Scholar] [CrossRef]
- Bailey, N.; Hibberd, S.; Power, H. Dynamics of a small gap gas lubricated bearing with Navier slip boundary conditions. J. Fluid Mech. 2017, 818, 68–99. [Google Scholar] [CrossRef] [Green Version]
- Liu, J. Research on Influencing Factors of Interference Torque of Gas-Floated Gyroscope. Ph.D. Thesis, Harbin Institute of Technology, Harbin, China, 2011. [Google Scholar]
- Liang, Y.; Liu, J.; Sun, Y.; Lu, L. Surface roughness effects on vortex torque of air supported gyroscope. Chin. J. Aeronaut. 2011, 24, 90–95. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Duan, F. Static error model of a gyroscope with gas-dynamic hemispherical bearings. J. Beijing Univ. Aeronaut. Astronaut. 2018, 44, 1705–1711. [Google Scholar]
- Tkacz, E.; Kozanecki, Z.; Kozanecka, D.; Łagodziński, J. A self-acting gas journal bearing with a flexibly supported foil—Numerical model of bearing dynamics. Int. J. Struct. Stab. Dyn. 2017, 17, 1740012. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Bearing | |
| Bottom radius, R (mm) | 7.5 |
| Bearing taper, k | 0.25 |
| Bearing width, b (mm) | 6 |
| Bearing clearance, c (μm) | 2 |
| Spacing between the bearings, d (mm) | 8 |
| Groove depth, hg (μm) | 1 |
| Number of grooves on each bearing, Ng | 6 |
| Groove angle, βg (°) | 45 |
| Rotor | |
| Mass, m (g) | 60 |
| Rotating speed, nr (r/min) | 30,000 |
| Moment of inertia around i-axis or o-axis, Jd (kg·m2) | 4.4533 × 10−6 |
| Moment of inertia around s-axis, Jp (kg·m2) | 5.308 × 10−6 |
| Lubricants | |
| Viscosity, μ [Pa⋅s] | 1.79 × 10−5 |
| Ambient pressure, Pa [Pa] | 1.013 × 105 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Zhang, D.; Duan, F. Interference Torque of a Gas-Dynamic Bearing Gyroscope Subject to a Uniform Change of the Specific Force and the Carrier Angular Velocity. Sensors 2020, 20, 6852. https://doi.org/10.3390/s20236852
Li Y, Zhang D, Duan F. Interference Torque of a Gas-Dynamic Bearing Gyroscope Subject to a Uniform Change of the Specific Force and the Carrier Angular Velocity. Sensors. 2020; 20(23):6852. https://doi.org/10.3390/s20236852
Chicago/Turabian StyleLi, Yan, Desheng Zhang, and Fuhai Duan. 2020. "Interference Torque of a Gas-Dynamic Bearing Gyroscope Subject to a Uniform Change of the Specific Force and the Carrier Angular Velocity" Sensors 20, no. 23: 6852. https://doi.org/10.3390/s20236852