Driver Characteristics Oriented Autonomous Longitudinal Driving System in Car-Following Situation


Abstract
:1. Introduction
2. Driver Characteristics in Car-Following Situation
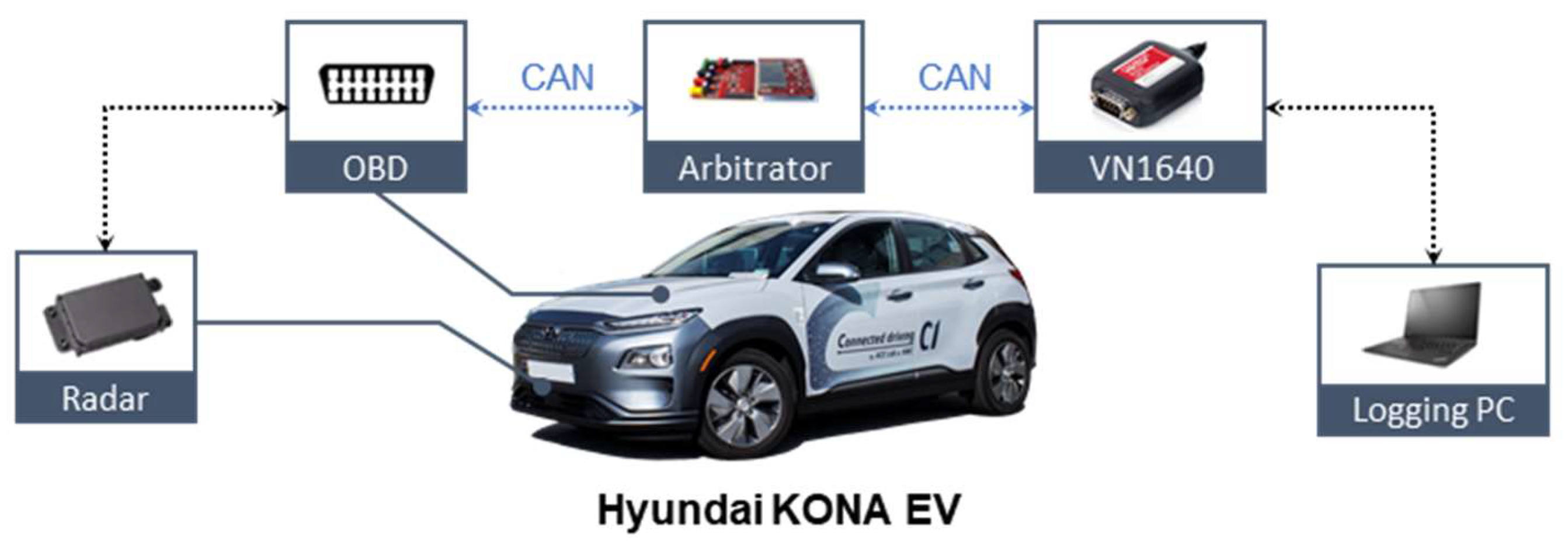
2.1. Driving Data Acquisition
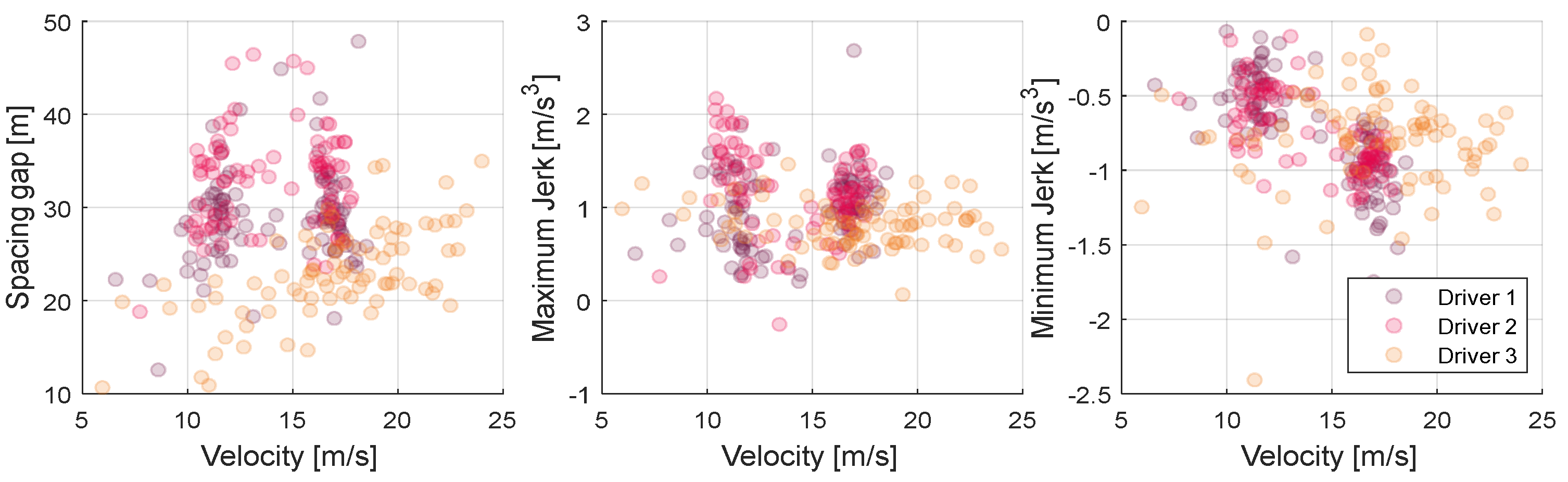
2.2. Driver Characteristics Analysis
3. Driver Characteristics Oriented Autonomous Longitudinal Driving System
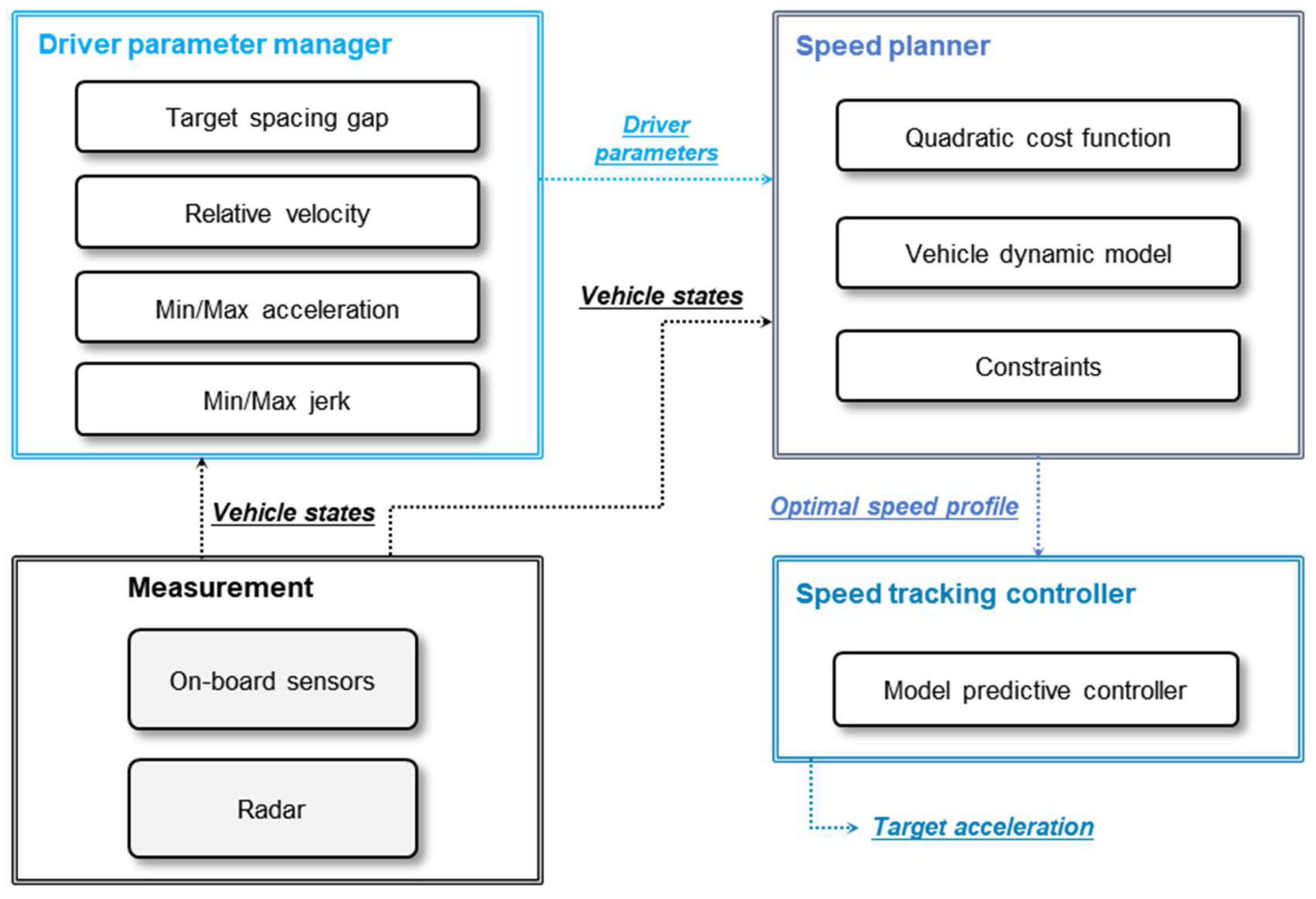
3.1. System Overview
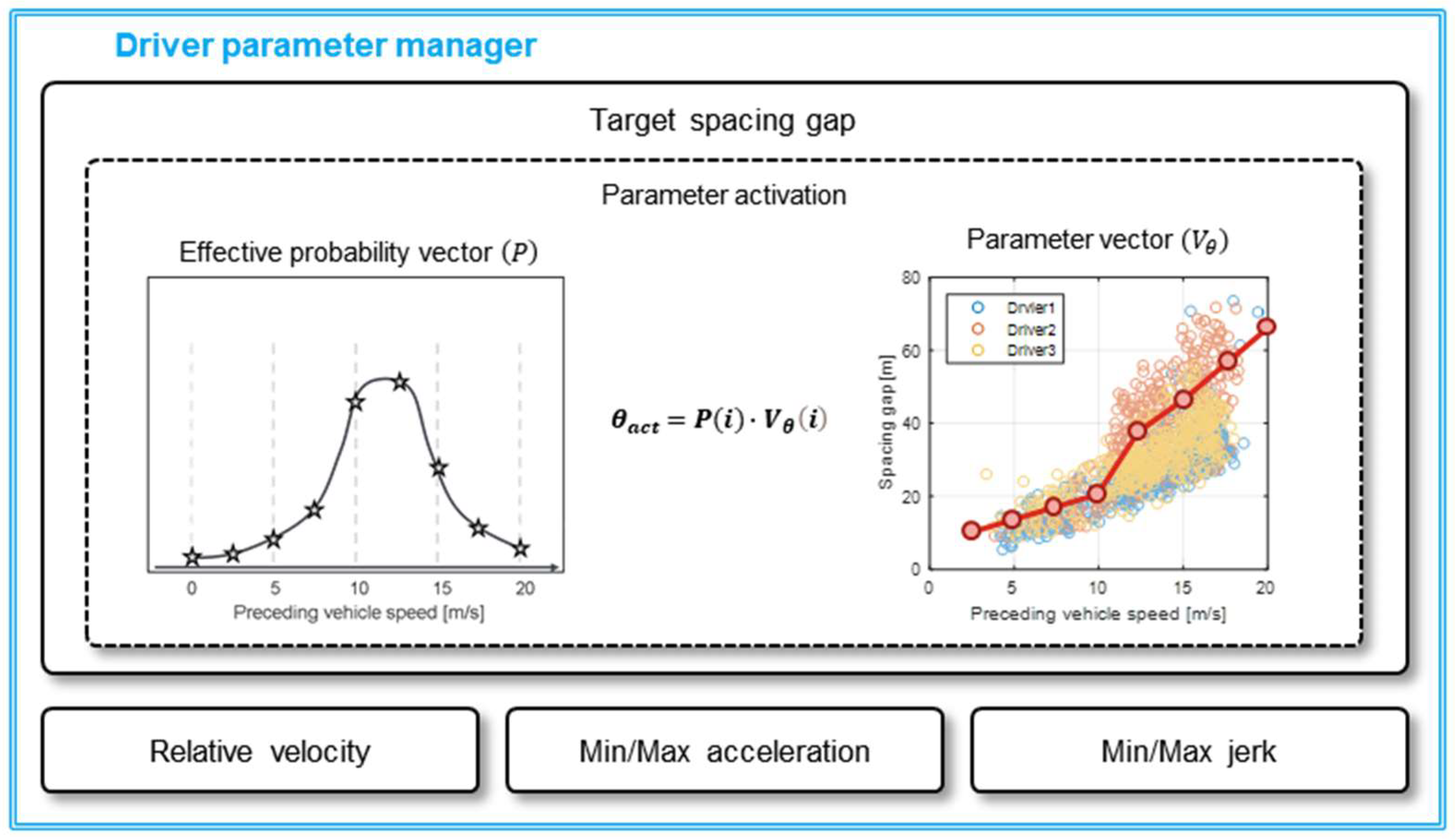
3.2. Driver Parameter Manager
3.3. Speed Planner
3.4. Speed Tracking Controller
4. Validation
4.1. Simulation Environment
4.2. Simulation Results
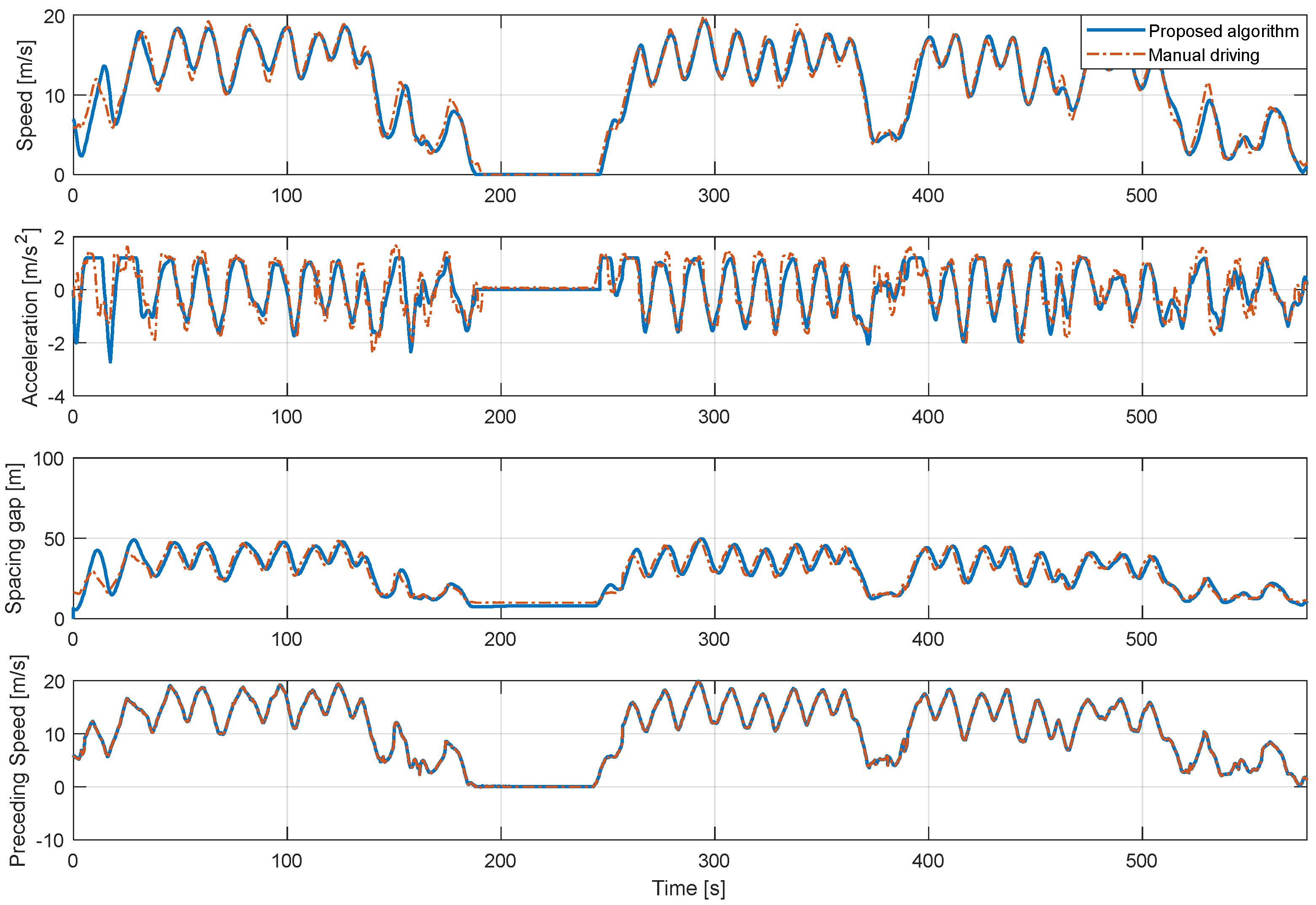
4.2.1. Personalized Longitudinal Driving Results
4.2.2. Effect of Variety of Driver Parameters
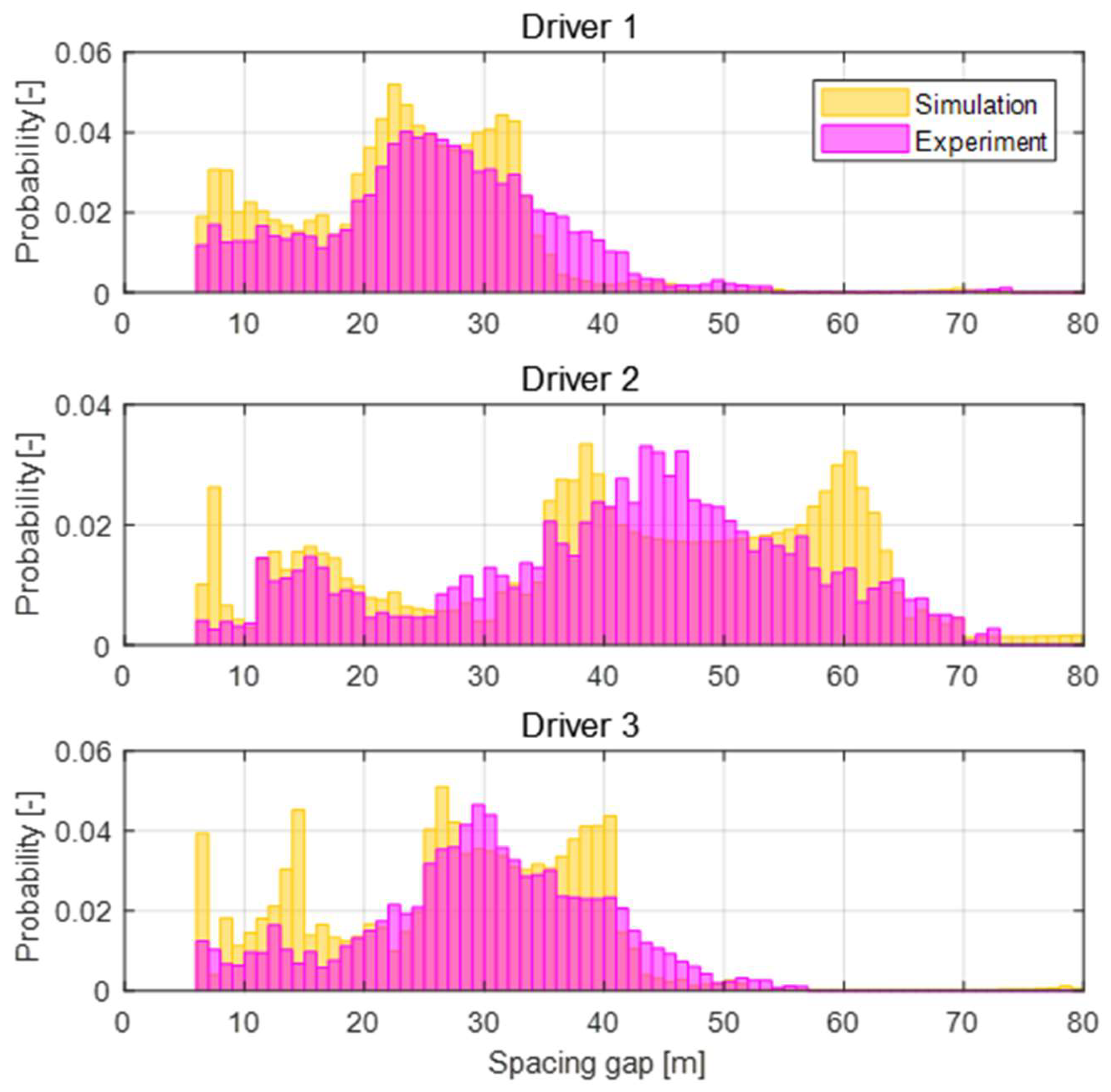
4.2.3. Statistical Validation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Bishop, R. A survey of intelligent vehicle applications worldwide. In Proceedings of the IEEE Intelligent Vehicles Symposium 2000 (Cat. No. 00TH8511), Dearborn, MI, USA, 5 October 2000; pp. 25–30. [Google Scholar]
- Xiao, L.; Gao, F. A comprehensive review of the development of adaptive cruise control systems. Veh. Syst. Dyn. 2010, 48, 1167–1192. [Google Scholar] [CrossRef]
- González, D.; Pérez, J.; Milanés, V.; Nashashibi, F. A Review of Motion Planning Techniques for Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1135–1145. [Google Scholar] [CrossRef]
- Paden, B.; Čáp, M.; Yong, S.Z.; Yershov, D.; Frazzoli, E. A Survey of Motion Planning and Control Techniques for Self-Driving Urban Vehicles. IEEE Trans. Intell. Veh. 2016, 1, 33–55. [Google Scholar] [CrossRef] [Green Version]
- Bianco, C.G.L.; Piazzi, A.; Romano, M. Velocity planning for autonomous vehicles. In Proceedings of the IEEE Intelligent Vehicles Symposium, Parma, Italy, 14–17 June 2004; pp. 413–418. [Google Scholar]
- Dey, K.C.; Yan, L.; Wang, X.; Wang, Y.; Shen, H.; Chowdhury, M.; Yu, L.; Qiu, C.; Soundararaj, V. A Review of Communication, Driver Characteristics, and Controls Aspects of Cooperative Adaptive Cruise Control (CACC). IEEE Trans. Intell. Transp. Syst. 2016, 17, 491–509. [Google Scholar] [CrossRef]
- Hasenjäger, M.; Wersing, H. Personalization in advanced driver assistance systems and autonomous vehicles: A review. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–7. [Google Scholar]
- Martinez, C.M.; Heucke, M.; Wang, F.Y.; Gao, B.; Cao, D. Driving Style Recognition for Intelligent Vehicle Control and Advanced Driver Assistance: A Survey. IEEE Trans. Intell. Transp. Syst. 2018, 19, 666–676. [Google Scholar] [CrossRef] [Green Version]
- Brackstone, M.; McDonald, M. Car-following: A historical review. Transp. Res. Part F Traffic Psychol. Behav. 1999, 2, 181–196. [Google Scholar] [CrossRef]
- Rajamani, R. Vehicle Dynamics and Control; Mechanical Engineering Series; Springer: Boston, MA, USA, 2012; ISBN 978-1-4614-1432-2. [Google Scholar]
- Ranjitkar, P.; Nakatsuji, T.; Kawamua, A. Car-Following Models: An Experiment Based Benchmarking. J. East. Asia Soc. Transp. Stud. 2005, 6, 1582–1596. [Google Scholar] [CrossRef]
- de Gelder, E.; Cara, I.; Uittenbogaard, J.; Kroon, L.; van Iersel, S.; Hogema, J. Towards personalised automated driving: Prediction of preferred ACC behaviour based on manual driving. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016; pp. 1211–1216. [Google Scholar]
- Rosenfeld, A.; Bareket, Z.; Goldman, C.V.; LeBlanc, D.J.; Tsimhoni, O. Learning Drivers’ Behavior to Improve Adaptive Cruise Control. J. Intell. Transp. Syst. 2015, 19, 18–31. [Google Scholar] [CrossRef]
- Zhu, B.; Jiang, Y.; Zhao, J.; He, R.; Bian, N.; Deng, W. Typical-driving-style-oriented Personalized Adaptive Cruise Control design based on human driving data. Transp. Res. Part C Emerg. Technol. 2019, 100, 274–288. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, L.; Zhang, D.; Li, K. An Adaptive Longitudinal Driving Assistance System Based on Driver Characteristics. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1–12. [Google Scholar] [CrossRef]
- Mikami, K.; Okuda, H.; Taguchi, S.; Tazaki, Y.; Suzuki, T. Model predictive assisting control of vehicle following task based on driver model. In Proceedings of the 2010 IEEE International Conference on Control Applications, Yokohama, Japan, 8–10 September 2010; pp. 890–895. [Google Scholar]
- Liebner, M.; Baumann, M.; Klanner, F.; Stiller, C. Driver intent inference at urban intersections using the intelligent driver model. In Proceedings of the 2012 IEEE Intelligent Vehicles Symposium, Alcala de Henares, Spain, 3–7 June 2012; pp. 1162–1167. [Google Scholar]
- Butakov, V.; Ioannou, P. Driving Autopilot with Personalization Feature for Improved Safety and Comfort. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Las Palmas, Spain, 15–18 September 2015; pp. 387–393. [Google Scholar]
- Kuge, N.; Yamamura, T.; Shimoyama, O.; Liu, A. A Driver Behavior Recognition Method Based on a Driver Model Framework. SAE Trans. 2000, 109, 469–476. [Google Scholar]
- Oliver, N.; Pentland, A.P. Driver Behavior Recognition and Prediction in a Smart Car. Proc. SPIE Int. Soc. Opt. Eng. 2000, 4023, 280–290. [Google Scholar]
- Morton, J.; Wheeler, T.A.; Kochenderfer, M.J. Analysis of Recurrent Neural Networks for Probabilistic Modeling of Driver Behavior. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1289–1298. [Google Scholar] [CrossRef]
- Yu, H.; Wu, Z.; Wang, S.; Wang, Y.; Ma, X. Spatiotemporal Recurrent Convolutional Networks for Traffic Prediction in Transportation Networks. Sensors 2017, 17, 1501. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Huang, X.; Sun, J.; Sun, J. A car-following model considering asymmetric driving behavior based on long short-term memory neural networks. Transp. Res. Part C Emerg. Technol. 2018, 95, 346–362. [Google Scholar] [CrossRef]
- Min, K.; Sim, G.; Ahn, S.; Sunwoo, M.; Jo, K. Vehicle Deceleration Prediction Model to Reflect Individual Driver Characteristics by Online Parameter Learning for Autonomous Regenerative Braking of Electric Vehicles. Sensors 2019, 19, 4171. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sim, G.; Min, K.; Ahn, S.; Sunwoo, M.; Jo, K. Deceleration Planning Algorithm Based on Classified Multi-Layer Perceptron Models for Smart Regenerative Braking of EV in Diverse Deceleration Conditions. Sensors 2019, 19, 4020. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jo, K.; Kim, J.; Kim, D.; Jang, C.; Sunwoo, M. Development of Autonomous Car—Part I: Distributed System Architecture and Development Process. IEEE Trans. Ind. Electron. 2014, 61, 7131–7140. [Google Scholar] [CrossRef]
- Moon, S.; Yi, K. Human driving data-based design of a vehicle adaptive cruise control algorithm. Veh. Syst. Dyn. 2008, 46, 661–690. [Google Scholar] [CrossRef]
- Lefèvre, S.; Carvalho, A.; Borrelli, F. A Learning-Based Framework for Velocity Control in Autonomous Driving. IEEE Trans. Autom. Sci. Eng. 2016, 13, 32–42. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Value |
|---|---|
| Maximum range | 150 m |
| FOV (Field of View) | +/− 10 degrees over 60 m +/− 45 degrees under 60 m |
| Update rate | 50 ms |
| Vehicle Parameter | Value | Powertrain Parameter | Value |
|---|---|---|---|
| Unloaded weight | 1685 kg | Maximum torque (Motor) | 395 Nm |
| Length | 4180 mm | Maximum power (Motor) | 150 kW |
| Width | 1800 mm | Maximum rpm (Motor) | 11,000 rpm |
| Height | 1570 mm | Inertia (Motor) | 0.028 kgm2 |
| Driving axle | Front driven | Capacity (Battery) | 180 Ah 64 kWh |
| Tire specification | 215/55 R | Idle voltage (Battery) | 353 V |
| Tire radius | 17 inch | Maximum power (Battery) | 150 kW |
| Driver # | RMSE of Speed [m/s] | RMSE of Spacing Gap [m] |
|---|---|---|
| 1 | 1.1101 | 6.6511 |
| 2 | 2.4716 | 15.6221 |
| 3 | 1.2282 | 9.5933 |
| Average | 1.6033 | 10.6222 |
| Driver # | K-S Distance | K-L Divergence |
|---|---|---|
| 1 | 0.1605 | 0.1365 |
| 2 | 0.1887 | 0.1602 |
| 3 | 0.1726 | 0.1402 |
| Average | 0.1739 | 0.1456 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, H.; Min, K.; Sunwoo, M. Driver Characteristics Oriented Autonomous Longitudinal Driving System in Car-Following Situation. Sensors 2020, 20, 6376. https://doi.org/10.3390/s20216376
Kim H, Min K, Sunwoo M. Driver Characteristics Oriented Autonomous Longitudinal Driving System in Car-Following Situation. Sensors. 2020; 20(21):6376. https://doi.org/10.3390/s20216376
Chicago/Turabian StyleKim, Haksu, Kyunghan Min, and Myoungho Sunwoo. 2020. "Driver Characteristics Oriented Autonomous Longitudinal Driving System in Car-Following Situation" Sensors 20, no. 21: 6376. https://doi.org/10.3390/s20216376