Control Systems and Electronic Instrumentation Applied to Autonomy in Wheelchair Mobility: The State of the Art



Abstract
:1. Introduction
2. Methods
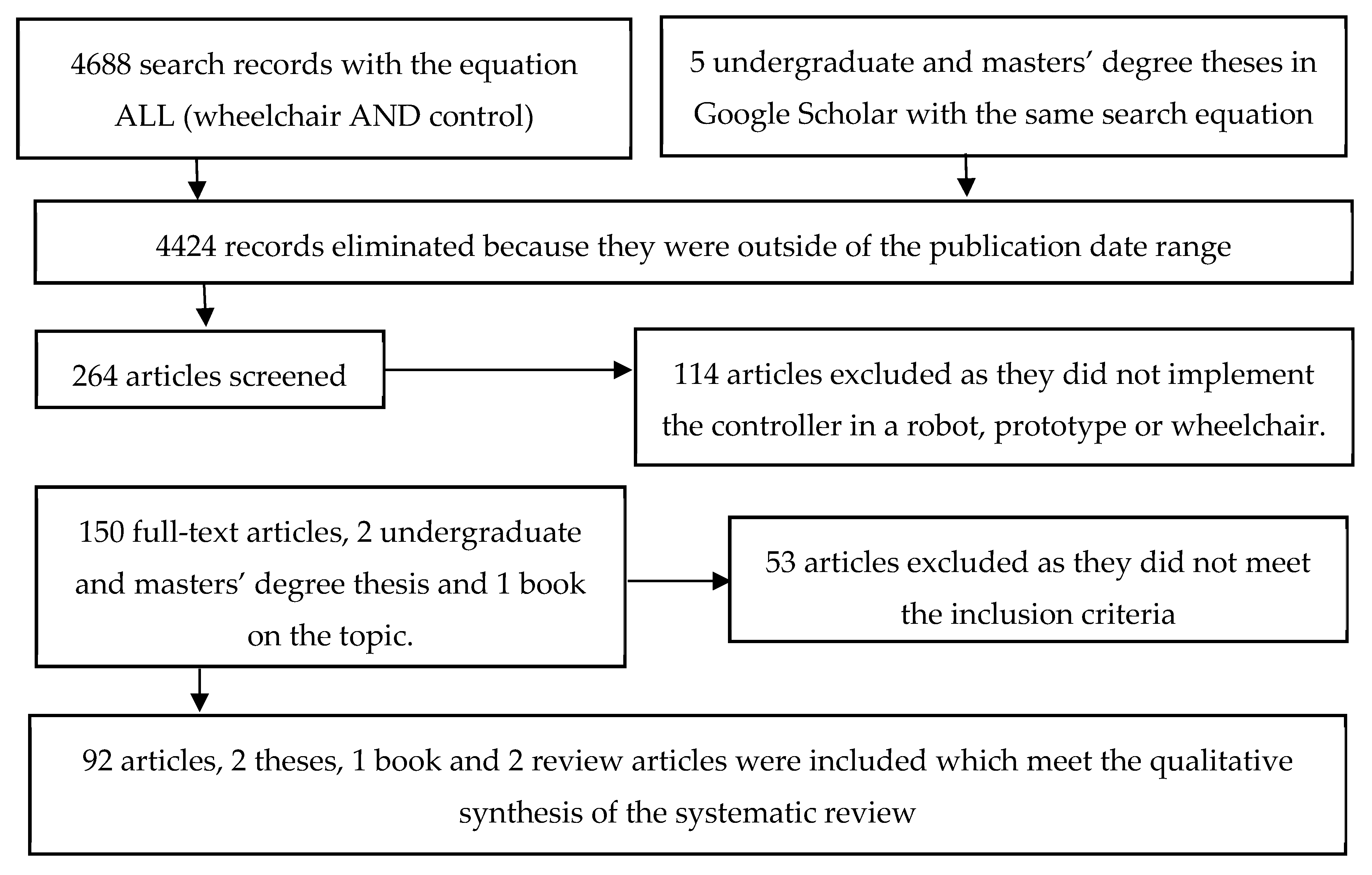
2.1. Search of Specialised Databases
2.2. Selection and Inclusion Criteria
2.3. Data Collection and Information Quality
2.4. Synthesis, Analysis, and Result Presentation
- Participants in the characterization of controlled systems
- Instrumentation non-invasively placed on the user
- Instrumentation incorporated in the wheelchair
3. Results
3.1. Participation in the Characterization of Controlled Systems
3.2. Instrumentation Non-Invasively Placed on the User
3.2.1. Brain-Computer Interface (BCI)
3.2.2. Systems Which Implement Micro-Electromechanical Sensors (MEMS)
Controllers Based on Hand Movements
Controllers Based on Head Movements
3.2.3. Surface Electromyography (sEMG) and Electro-Oculography (EOG)
Controllers Which Implement EOG
Controllers Which Implement sEMG
3.2.4. Other Types of Instrumentation
3.3. Instrumentation Incorporated in the Wheelchair
3.3.1. Obstacle Detection
3.3.2. Artificial Vision
Digital Image Processing Through FPGA
Cameras or Optical Sensors with Different Characteristics
3.3.3. Wheelchair Navigation
Linear and Hybrid Control
Adaptative, Predictive and Intelligent Control
4. Discussion
4.1. Discussion on Instrumentation Non-Invasively Placed on the User
4.1.1. Characteristics of the User
4.1.2. Processing Characteristics and Design Computational Cost
4.2. Discussion on Wheelchair Instrumentation
4.2.1. Wheelchair Instrumentation and HMI
4.2.2. Computational Cost
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- World Health Organization. International Classification of Functioning, Disability and Health (ICF). Available online: https://www.who.int/classifications/icf/en/ (accessed on 16 August 2020).
- World Health Organization. Fact Sheet on Wheelchairs. Available online: https://apps.who.int/iris/handle/10665/205041 (accessed on 16 August 2020).
- Sala Situacional de Personas con Discapacidad. Available online: https://www.minsalud.gov.co/sites/rid/Lists/BibliotecaDigital/RIDE/VS/MET/sala-situacional-discapacidad2019-2-vf.pdf (accessed on 16 August 2020).
- World Health Organization. World Report on Disability. Available online: https://www.who.int/disabilities/world_report/2011/report/en/ (accessed on 16 August 2020).
- Información Estadística de la Discapacidad. Available online: https://www.dane.gov.co/files/investigaciones/discapacidad/inform_estad.pdf (accessed on 16 August 2020).
- Widyotriatmo, A.; Suprijanto; Andronicus, S. A collaborative control of brain computer interface and robotic wheelchair. In Proceedings of the 10th Asian Control Conference (ASCC 2015), Kota Kinabalu, Malaysia, 31 May–3 June 2015; pp. 1–6. [Google Scholar]
- Long, J.; Li, Y.; Wang, H.; Yu, T.; Pan, J.; Li, F. A Hybrid Brain Computer Interface to Control the Direction and Speed of a Simulated or Real Wheelchair. IEEE Trans. Neural Syst. Rehabil. Eng. 2012, 20, 720–729. [Google Scholar] [CrossRef] [PubMed]
- Dabosmita, P.; Moumita, P. Automation of wheelchair using brain computer interface (BCI) technique. In Proceedings of the American Institute of Physics (AIP 2019), Mangalore, India, 19–21 September 2019; pp. 1–6. [Google Scholar]
- Kobayashi, N.; Nakagawa, M. BCI-based control of electric wheelchair. In Proceedings of the 4th Global Conference on Consumer Electronics (GCCE 2015), Osaka, Japan, 27–30 October 2015; pp. 429–430. [Google Scholar]
- Jayabhavani, G.; Raajan, N.; Rubini, R. Brain mobile interfacing (BMI) system embedded with wheelchair. In Proceedings of the IEEE Conference on Information and Communication Technologies (ICT 2013), Thuckalay, India, 11–12 April 2013; pp. 1129–1133. [Google Scholar]
- Zgallai, W.; Brown, J.; Ibrahim, A.; Mahmood, F.; Mohammad, K.; Khalfan, M.; Mohammed, M.; Salem, M.; Hamood, N. Deep Learning AI Application to an EEG driven BCI Smart Wheelchair. In Proceedings of the Advances in Science and Engineering Technology International Conferences (ASET 2019), Dubai, UAE, 26–10 April 2013; pp. 1–5. [Google Scholar]
- Kim, K.; Carlson, T.; Lee, S. Design of a robotic wheelchair with a motor imagery based brain-computer interface. In Proceedings of the International Winter Workshop on Brain-Computer Interface (IWW-BCI 2013), Gangwo, Korea, 18–20 February 2013; pp. 46–48. [Google Scholar]
- Reshmi, G.; Amal, A. Design of a BCI system for piloting a wheelchair using five class MI Based EEG. In Proceedings of the 3rd International Conference on Advances in Computing and Communications (ICACC 2013), Cochin, India, 29–31 August 2013; pp. 25–28. [Google Scholar]
- Jang, W.; Lee, S.; Lee, D. Development BCI for individuals with severely disability using EMOTIV EEG headset and robot. In Proceedings of the International Winter Workshop on Brain-Computer Interface (IWW-BCI 2014), Jeongsun-kun, Korea, 17–19 February 2014; pp. 1–3. [Google Scholar]
- Huang, C.; Wang, Z.; Chen, G.; Yang, C. Development of a smart wheelchair with dual functions: Real-time control and automated guide. In Proceedings of the 2nd International Conference on Control and Robotics Enginnering (ICCRE 2017), Bangkok, Thailand, 1–3 April 2017; pp. 73–76. [Google Scholar]
- Ng, D.; Soh, Y.; Goh, S. Development of an autonomous BCI wheelchair. In Proceedings of the Symposium on Computational Intelligence in Brain Computer Interfaces (CIBCI 2104), Orlando, FL, USA, 9–12 December 2014; pp. 1–4. [Google Scholar]
- Carrillo, C. Diseño y Construcción de una Interfaz Cerebro Computadora Para el Control de una Silla de Ruedas Como Ayuda a Personas con Discapacidad Motriz. Master’s Thesis, Universidad del Norte, Barranquilla, Colombia, 22 September 2017. [Google Scholar]
- Lasluisa, N. Diseño y Construcción de una Silla de Ruedas Autónoma Mediante Ondas Cerebrales. Bachelor’s Thesis, Universidad de las Fuerzas Armadas, Sangolquí, Ecuador, 15 March 2016. [Google Scholar]
- Pinos, E.; Guevara, D.; López, F. Electroencephalographic signals acquisition for the movement of a wheelchair prototype in a BCI system. In Proceedings of the Asia-Pacific Conference on Computer Aided System Engineering (APCASE 2015), Quito, Ecuador, 14–16 July 2015; pp. 41–45. [Google Scholar]
- Chen, N.; Wang, X.; Men, X. Hybrid BCI based control strategy of the intelligent wheelchair manipulator system. In Proceedings of the Conference on Industrial Electronics and Applications (ICIEA 2018), Wuhan, China, 31 May–2 June 2018; pp. 824–828. [Google Scholar]
- Su, Z.; Xu, X.; Ding, J.; Lu, W. Intelligent wheelchair control system based on BCI and the image display of EEG. In Proceedings of the IEEE Advanced Information Management, Communicates, Electronic an Automation Control Conference (IMCEC 2016), Xi’an, China, 3–5 October 2016; pp. 1350–1354. [Google Scholar]
- Kim, K.; Lee, S. Steady-state somatosensory evoked potentials for brain-controlled wheelchair. In Proceedings of the International Winter Workshop on Brain-Computer Interface (IWW-BCI 2014), Jeongsun-kun, Korea, 17–19 February 2014; pp. 1–2. [Google Scholar]
- Turnip, A.; Hidayat, T.; Kusumandari, D. Development of brain-controlled wheelchair supported by raspicam image processing based Raspberry Pi. In Proceedings of the 2nd International Conference on Automation, Cognitive Science, Optics, Micro Electro-Mechanical Systems and Information Technology (ICACOMIT 2017), Jakarta, Indonesia, 23–24 October 2017; pp. 7–11. [Google Scholar]
- Shahin, M.; Tharwat, A.; Gaber, T. A Wheelchair Control System Using Human-Machine Interaction: Single-Modal and Multimodal Approaches. J. Intell. Syst. 2019, 28, 115–132. [Google Scholar] [CrossRef]
- Borges, L.; Martins, F.; Naves, E.; Bastos, T.; Lucena, V. Multimodal system for training at distance in a virtual or augmented reality environment for users of electric-powered wheelchairs. In Proceedings of the International Federation of Automatic Control (IFAC), Porto Alwegre, Brazil, 6–9 November 2016; pp. 156–160. [Google Scholar]
- Chrisander, S.; Widyotriatmo, A. Wall following control for the application of a brain-controlled wheelchair. In Proceedings of the International Conference on Intelligence Autonomous Agents, Networks and Systems (INAGENTSYS 2014), Bandung, Indonesia, 19–21 August 2014; pp. 36–41. [Google Scholar]
- Yoda, I.; Tanaka, J.; Raytchev, B.; Sakakue, K.; Inoue, T. Stereo camera based non-contact non-constraining head gesture interface for electric wheelchairs. In Proceedings of the 18th International Conference on Pattern Recognition (ICPR’06), Hong Kong, China, 20–24 August 2006; pp. 740–745. [Google Scholar]
- Manta, L.; Cojocaru, D.; Vladu, I.; Dragomir, A.; Marin, A. Wheelchair control by head motion using a noncontact method in relation to the pacient. In Proceedings of the 20th International Carpathian Control Conference (ICCC 2019), Krakow-Wieliczka, Poland, 26–29 May 2019; pp. 1–6. [Google Scholar]
- Pangestu, G.; Utaminingrum, F.; Bachtiar, F. Eye state recognition using multiple methods for applied to control smart wheelchair. Int. J. Intell. Eng. Syst. 2019, 12, 232–241. [Google Scholar] [CrossRef]
- Rajesh, A.; Mantur, M. Eyeball gesture controlled automatic wheelchair using deep learning. In Proceedings of the Region 10 Humanitarian Technology Conference (R10-HTC 2017), Dhaka, Bangladesh, 21–23 December 2017; pp. 387–391. [Google Scholar]
- Wanluk, N.; Visitsattapongse, S.; Juhong, A.; Pintavirooj, C. Smart wheelchair based on eye tracking. In Proceedings of the 9th Biomedical Engineering International Conference (BMEiCON 2016), Laung Prabang, Laos, 7–9 December 2016; pp. 1–4. [Google Scholar]
- Sumida, Y.; Hayashi, M.; Goshi, K.; Matsunaga, K. Development of a route finding system for manual wheelchair users based on actual measurement data. In Proceedings of the 9th International Conference Ubiquitous Intelligence and Computing and 9th International Conference on Autonomic and Trusted Computing (UIC-ATC 2012), Fukuoka, Japan, 4–7 September 2012; pp. 17–23. [Google Scholar]
- Natraj, A.; Natraj, S.; Waharte, S.; Kroening, D. Camera-laser projector stereo system based anti-collision system for robotic wheelchair users with cognitive impairment. In Proceedings of the International Conference on Multisensor Fusion and Information Integration for Intelligent Systems (MFI), Beijing, China, 28–29 September 2014; pp. 1–6. [Google Scholar]
- Couceiro, M. Wheelchair Navigation: Automatically Adapting to Evolving Environments. Towards Auton. Robot. Syst. 2019, 1, 131–142. [Google Scholar] [CrossRef] [Green Version]
- Puanhvuan, D.; Khemmachotikun, S.; Wechakam, P.; Wijam, B.; Wongsawat, Y. Automated navigation system for eye-based wheelchair controls. In Proceedings of the Biomedical Engineering International Conference (BMEiCON 2014), Fukuoka, Japan, 26–28 November 2014; pp. 1–4. [Google Scholar]
- Qassim, H.; Lakany, H. Virtual environment modelling using simulated laser scanners. In Proceedings of the 2nd International Conference on Electrical, Communication, Computer, Power and Control Engineering (ICECCPCE), Mosul, Iraq, 13–14 February 2019; pp. 13–14. [Google Scholar]
- Ruzaij, M.; Neubert, S.; Stoll, N.; Thurov, K. Multi-sensor Robotic-wheelchair controller for Handicap and Quadriplegia patients using embedded technologies. In Proceedings of the International Conference on Human System Interactions (HIS 2016), Portsmouth, UK, 6–8 July 2016; pp. 103–109. [Google Scholar]
- Karpov, V.; Malakhov, D.; Moscovsky, A.; Robvo, M.; Sorokoumov, P.; Velichskovsky, B.; Ushakov, V. Architecture of a wheelchair control system for disabled people: Towards multifunctional robotic solution with neurobiological interfaces. Sovrem. Technol. Med. 2019, 11, 90–100. [Google Scholar] [CrossRef]
- Boucha, D.; Amiri, A.; Chogueur, D. Controlling electronic devices remotely by voice and brain waves. In Proceedings of the International Conference on Mathematics and Information Technology (ICMIT 2017), Adrar, Algeria, 4–5 December 2017; pp. 38–42. [Google Scholar]
- Ruzaij, M.; Poonguzhali, S. Design and implementation of low cost intelligent wheelchair. In Proceedings of the International Conference on Recent Trends Information Technology (ICRTIT 2012), Chennai, India, 19–21 April 2012; pp. 468–471. [Google Scholar]
- Wang, D.; Yu, H. Development of the control system of a voice-operated wheelchair with multi-posture characteristics. In Proceedings of the 2nd Asia-Pacific Conference on Intelligent Robot Systems (ACIRS 2017), Wuhan, China, 16–18 June 2017; pp. 151–155. [Google Scholar]
- Umchid, S.; Limhaprasert, P.; Chumsoongnern, S.; Petthong, T.; Leedomwong, T. Voice controlled automatic wheelchair. In Proceedings of the Biomedical Engineering International Conference (BMEiCON 2018), Chiang Mai, Thailand, 21–24 November 2018; pp. 1–5. [Google Scholar]
- Aktar, N.; Jaharr, I.; Lala, B. Voice recognition based intelligent wheelchair and GPS tracking system. In Proceedings of the 2nd International Conference on Electrical, Computer and Communication Engineeering (ECCE 2019), Cox’sBazar, Bangladesh, 7–9 February 2019; pp. 7–9. [Google Scholar]
- Kathirvelan, J.; Anilkumar, R.; Alex, Z.; Fazul, A. Development of low cost automatic wheelchair controlled by oral commands using standalone controlling system. In Proceedings of the 2012 IEEE International Conference on Computational Intelligence and Computing Research (ICCIC 2012), Coimbatore, India, 18–20 December 2012; pp. 1–4. [Google Scholar]
- Rabhi, Y.; Mrabet, M.; Fnaiech, F.; Gorce, P. Intelligent joystick for controlling power wheelchair navigation. In Proceedings of the 3rd International Conference on System Control (ICSC 2013), Algiers, Algeria, 29–31 October 2013; pp. 1020–1025. [Google Scholar]
- Nguyen, V.; Sentouh, C.; Pudlo, P.; Popieul, J. Path following controller for electric power wheelchair using model predictive control and transverse feedback linearization. In Proceedings of the International Conference on Systems, Man and Cybernetics (SMC 2018), Miyazaki, Japan, 7–10 October 2018; pp. 4319–4325. [Google Scholar]
- Gulpanich, S.; Petchhan, J.; Wongvanich, N. PLC-based wheelchair control with integration of the Internet of things. In Proceedings of the 57th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE 2018), Nara, Japan, 11–14 September 2018; pp. 1598–1603. [Google Scholar]
- Makwana, S.; Tandon, A. Touch screen based wireless multifunctional wheelchair using ARM and PIC microcontroller. In Proceedings of the International Conference on Microelectronics, Computing and Communications (MicroCom 2016), Durgapur, India, 23–25 January 2016; pp. 1–4. [Google Scholar]
- Rabhi, Y.; Mrabet, M.; Fnaiech, F. Optimized joystick control interface for electric powered wheelchairs. In Proceedings of the 16th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA 2015), Monastir, Tunisia, 21–23 December 2015; pp. 201–206. [Google Scholar]
- Solea, R.; Margarit, A.; Cernega, C.; Serbencu, A. Head movement control of powered wheelchair. In Proceedings of the 23rd International Conference on System Theory, Control and Computing (ICSTCC 2019), Sinaia, Romania, 9–11 October 2019; pp. 632–637. [Google Scholar]
- Sivakumar, M.; Murji, J.; Jacob, L.; Nyange, F.; Banupriya, M. Speech controlled automatic wheelchair. In Proceedings of the Pan African International Conference on Information Science, Computing and Telecommunications (PACT 2013), Lusaka, Zambia, 13–17 July 2013; pp. 70–73. [Google Scholar]
- Lu, T. A motion control method of intelligent wheelchair based on hand gesture recognition. In Proceedings of the 8th Conference on Industrial Electronics and Applications (ICIEA 2013), Melbourne, Australia, 19–21 June 2013; pp. 957–962. [Google Scholar]
- Ruzaij, M.; Neubert, S.; Stoll, N.; Thurov, K. Auto calibrated head orientation controller for robotic-wheelchair using MEMS sensors and embedded technologies. In Proceedings of the Sensors Application Symposium (SAS 2016), Catania, Italy, 20–22 April 2016; pp. 433–438. [Google Scholar]
- Kaur, S.; Vashist, H. Automation of Wheel Chair Using MEMS Accelerometer (ADXL330). Adv. Electron. Electr. Eng. 2013, 3, 227–232. [Google Scholar]
- Canagareddy, D.; Subarayadu, K.; Hurbungs, V. Hand gesture controller for robotic-wheelchair using microelectromechanical sensor ADXL 345. In Proceedings of the International Conference on Emerging Trends in Electrical, Electronic and Communications Engineering (ELECOM 2018), Mauritius, East Africa, 28–30 November 2018; pp. 3–5. [Google Scholar]
- Postolache, O.; Viegas, V.; Dias, J.; Vinhas, J.; Silva, P.; Postolache, G. Toward developing a smart wheelchair for user physiological stress and physical activity monitoring. In Proceedings of the International Symposium on Medical Measurements and Applications (MeMeA 2014), Lisbon, Portugal, 11–12 June 2014; pp. 1–6. [Google Scholar]
- Chen, Y.; Chen, S.; Chen, W.; Lin, J. A head orientated wheelchair for people with disabilities. Disabil. Rehabil. 2003, 25, 249–253. [Google Scholar] [CrossRef] [PubMed]
- Dobrea, M.; Dobrea, D.; Severin, I. A new wearable system for head gesture recognition designed to control an intelligent wheelchair. In Proceedings of the E-Health and Bioengineering Conference, Iasi, Romania, 21–23 November 2019; pp. 7–11. [Google Scholar]
- Kader, M.A.; Alam, M.E.; Jahan, N.; Bhuiyan, M.A.; Alam, M.S.; Sultana, Z. Design and implementation of a head motion- controlled semi-autonomous wheelchair for quadriplegic patients based on 3-axis accelerometer. In Proceedings of the 22nd International Conference on Computer and Information Technology (ICCIT 2019), Dhaka, Bangladesh, 18–20 December 2019; pp. 18–20. [Google Scholar]
- Dey, P.; Hasan, M.; Mostofa, S.; Rana, A. Smart wheelchair integrating head gesture navigation. In Proceedings of the International Conference on Robotics, Electrical and Signal Processing Techniques (ICREST 2019), Dhaka, Bangladesh, 10–12 January 2019; pp. 329–334. [Google Scholar]
- Marins, G.; Carvalho, D.; Marcato, A.; Junior, I. Development of a control system for electric wheelchairs based on head movements. In Proceedings of the Intelligent Systems Conference (IntelliSys 2017), London, UK, 7–8 September 2017; pp. 996–1001. [Google Scholar]
- Gomes, D.; Fernandes, F.; Castro, E.; Pires, G. Head-movement interface for wheelchair driving based on inertial sensors. In Proceedings of the Portuguese Meeting on Bioengineering (ENBENG 2019), Lisbon, Portugal, 22–23 February 2019; pp. 1–4. [Google Scholar]
- Rohmer, E.; Pinheiro, P.; Cardozo, E.; Bellone, M.; Reina, G. Laser based Driving Assistance for Smart Robotic Wheelchairs. In Proceedings of the 20th Conference on Emerging Technologies & Factory Automation (ETFA), Luxemburg, 8–11 September 2015; pp. 1–4. [Google Scholar]
- Jia, P.; Hu, H. Head gesture recognition for hands-free control of an intelligent wheelchair. Ind. Robot 2012, 1, 60–68. [Google Scholar] [CrossRef]
- Bastos-Filho, T.; Kumar, D.; Arjunan, S. Devices for Mobility and Manipulation for People with Reduced Abilities, 1st ed.; CRC Press: Boca Raton, FL, USA, 2014; pp. 1–232. ISBN 9780429102714. [Google Scholar]
- Challagundla, M.; Yogeshwar, K.; Harsha, N. Automatic motion control of powered wheelchair by the movements of eye blink. In Proceedings of the International Conference on Advanced Communications, Control and Computing Technologies (ICACCCT 2014), Ramanathapuram, India, 8–10 May 2014; pp. 1003–1007. [Google Scholar]
- Pingali, T.; Dubey, S.; Shivaprasad, A.; Varshney, A.; Ravishankar, S.; Pingali, G.; Polisetty, N.; Manjunath, N.; Padmaja, K. Eye-gesture controlled intelligent wheelchair using Electro-Oculography. In Proceedings of the International Symposium on Circuits and Systems (ISCAS 2014), Melbourne, Australia, 1–5 June 2014; pp. 2065–2068. [Google Scholar]
- Hardiansyah, R.; Ainurrohmah, A.; Aniroh, Y.; Tyas, F. The electric wheelchair control using electromyography sensor of arm muscle. In Proceedings of the International Conference on Information, Communication Technology and Systems (ICTS 2016), Surabaya, Indonesia, 12 October 2016; pp. 129–134. [Google Scholar]
- Jang, G.; Kim, J.; Lee, S.; Choi, Y. EMG-Based Continuous Control Scheme with Simple Classifier for Electric-Powered Wheelchair. IEEE Trans. Ind. Electron. 2016, 63, 3695–3705. [Google Scholar] [CrossRef]
- Jang, G.; Choi, Y. EMG-based continuous control method for electric wheelchair. In Proceedings of the International Conference on Intelligence Robots and Systems (IEEE/RSJ 2014), Chicago, IL, USA, 14–18 September 2014; pp. 3549–3554. [Google Scholar]
- Küçükyildiz, G.; Ocak, H.; Şayli, Ö.; Karakaya, S. Real time control of a wheelchair based on EMG and Kinect for the disabled people. In Proceedings of the Medical Technologies National Conference (TIPTEKNO 2015), Bodrum, Turkey, 15–18 October 2015; pp. 1–4. [Google Scholar]
- Fortune, E.; Cloud, B.; Madansingh, S.; Ngufor, C.; Straaten, M.; Goodwin, M.; Murphree, D.; Zhao, K.; Banitt, M. Estimation of manual wheelchair-based activities in the free-living environment using a neural network model with inertial body-worn sensors. J. Electromyogr. Kines. 2019, 47, 102337. [Google Scholar] [CrossRef] [PubMed]
- Silva, A.; Morere, Y.; Naves, E.; Sa, A.; Soares, A. Virtual electric wheelchair controlled by electromyographic signals. In Proceedings of the Biosignals and Biorobotics Conference (ISSNIP BRC), Rio de Janeiro, Brazil, 18–20 February 2013; pp. 1–5. [Google Scholar]
- Zhang, J.; Wang, J.; Chen, W. A control system of driver assistance and human following for smart wheelchair. In Proceedings of the International Conference on Robotics and Biomimetics (IEEE ROBIO 2014), Bali, Indonesia, 5–10 December 2014; pp. 1927–1932. [Google Scholar]
- Taniue, H.; Kaneko, J.; Kojima, K. Development of automatic barrier detection system for wheelchair. In Proceedings of the 4th Global Conference on Consumer Electronics (GCCE 2015), Osaka, Japan, 27–30 October 2015; pp. 374–376. [Google Scholar]
- Lee, Y.; Chiu, C.; Kuo, I. Fuzzy wall-following control of a wheelchair. In Proceedings of the 17th World Congress of International Fuzzy Systems Association and 9th International Conference on Soft Computing and Intelligent Systems (IFSA-SCIS 2017), Otsu, Japan, 27–30 June 2017; pp. 1–6. [Google Scholar]
- Maatoug, K.; Njah, M.; Jallouli, M. Multisensor data fusion for electrical wheelchair localization using extended Kalman Filter. In Proceedings of the 18th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA 2017), Monastir, Tunisia, 21–23 December 2017; pp. 257–260. [Google Scholar]
- Motokucho, T.; Oda, N. Vision-based human-following control using optical flow field for power assisted wheelchair. In Proceedings of the International Workshop on Advanced Motion Control (AMC 2014), Yokohama, Japan, 14–16 March 2014; pp. 266–271. [Google Scholar]
- Tsunoda, T.; Premachandra, C.; Premachandra, H. Visible light communication by using LED array for automatic wheelchair control in hospitals. In Proceedings of the 23rd International Symposium on Consumer Technologies (ISCT 2019), Ancona, Italy, 19–21 June 2019; pp. 210–215. [Google Scholar]
- Razali, N.; Ghani, N.; Jamin, N.; Masrom, M. Stability control of wheelchair system using interval type-2 fuzzy logic control. In Proceedings of the 9th IEEE Control System Graduate Research Colloquium (ICSGRC 2018), Sham Alam, Malaysia, 3–4 August 2018; pp. 162–167. [Google Scholar]
- Ohtsuka, H.; Shibasato, K.; Shimada, Y.; Kato, T. Hand-free maneuvering system for electric wheelchair using laser range finder. In Proceedings of the 11th Asian Control Conference (ASCC), Gold Coast, QLD, Australia, 17–20 December 2017; pp. 1367–1372. [Google Scholar]
- Clearesta, E.; Wardhana, A.A.; Widyotriatmo, A.; Suprijanto. Adaptive control for velocity control of an electric wheelchair. In Proceedings of the 3rd International Conference on Instrumentation, Control and Automation (ICA 2013), Ungasan, Indonesia, 28–30 August 2013; pp. 222–226. [Google Scholar]
- Matsuo, K.; Barolli, L. Design and implementation of an omnidirectional wheelchair: Control system and its applications. In Proceedings of the 9th International Conference on Broadband and Wireless-Computing, Communication and Applications (BWCCA 2014), Guandong, China, 8–10 November 2014; pp. 532–535. [Google Scholar]
- Chen, X.; Agrawal, S. Assisting versus repelling force-feedback for learning of a line following task in a wheelchair. IEEE Trans. Neural Syst. Rehabil. Eng. 2013, 21, 959–968. [Google Scholar] [CrossRef] [PubMed]
- Sato, Y.; Suzuki, R.; Arai, M.; Kobayashi, Y.; Kuno, Y.; Fukushima, M.; Yamazaki, K.; Yamazaki, A. Multiple robotic wheelchair system able to move with a companion using map information. In Proceedings of the International Conference on Human-Robot Interaction (ACM/IEEE 2014), Bielefeld, Germany, 3–6 March 2014; pp. 286–287. [Google Scholar]
- Feng, G.; Guerra, T.; Nguyen, A.; Busoniu, L.; Mohammad, S. Robust Observer-Based Tracking Control Design for Power- Assisted Wheelchairs. IFAC-PapersOnLine 2019, 52, 61–66. [Google Scholar] [CrossRef]
- Megalingam, R.; Pillai, M. FPGA based wheelchair autonavigation for people with mobility issues. In Proceedings of the IEEE International WIE Conference on Electrical and Computer Engineering (WIECON-ECE 2015), Dhaka, Bangladesh, 19–20 December 2015; pp. 35–38. [Google Scholar]
- Chang, C.; Chen, C.; Chen, Y.; Lin, B. Kinect-based powered wheelchair control system. In Proceedings of the International Conference on Intelligent Systems, Modelling and Simulation (ISMS 2013), Bangkok, Thailand, 29–31 June 2013; pp. 186–189. [Google Scholar]
- Makwana, S.; Shah, V.; Mehta, S. Prototype buildout of GUI based multifaceted automated wheelchair system. In Proceedings of the International Conference on Intelligent Computing and Control Systems (ICICCS 2017), Madurai, India, 15–16 June 2017; pp. 406–411. [Google Scholar]
- Tokhi, M.; Ghani, N.; Hassan, M.; Nasir, A. A dual phase modular fuzzy control structure for an automode wheelchair in ascending and descending stairs. In Proceedings of the Conference on Control and Automation, Birmingham, UK, 4–5 June 2013; pp. 1–6. [Google Scholar]
- Chocoteco, J.; Morales, R.; Feliu, V.; Sánchez, L. Trajectory Planning for a Stair-Climbing Mobility System Using Laser Distance Sensors. IEEE Syst. J. 2014, 10, 944–956. [Google Scholar] [CrossRef]
- Rabhi, Y.; Mrabet, M.; Fnaiech, F.; Gorce, P. A feedforward neural network wheelchair driving joystick. In Proceedings of the International Conference on Electrical Engineering and Software Applications (ICEESA 2013), Hammamet, Tunisia, 21–23 March 2013; pp. 1–6. [Google Scholar]
- Sreejith, T.; Vishnu, J.; Vijayan, G. Trackball controlled novel, cost effective electric wheelchair. In Proceedings of the International Conference on Control, Power, Communication and Computing Technologies (ICCPCCT 2018), Kannur, India, 23–24 March 2018; pp. 205–209. [Google Scholar]
- Zhao, J.; Huang, X.; Massoud, Y. An efficient real-time FPGA implementation for object detection. In Proceedings of the 12th International New Circuits and Systems Conference (NEWCAS 2014), Trois-Rivieres, QC, Canada, 22–25 June 2014; pp. 313–316. [Google Scholar]
- Wu, B.; Jen, C.; Tsou, T.; Chen, P. Accompanist recognition and tracking for intelligent wheelchairs. In Proceedings of the International Conference on Systems, Man, and Cybernetics (SMC 2014), San Diego, CA, USA, 5–8 October 2014; pp. 2138–2143. [Google Scholar]
- Liang, X.; Li, X.; Jia, S.; Sun, Y. Wheelchair/bed docking control based on the combination of vision and ultrasound. In Proceedings of the Chinese Automation Congress (CAC 2017), Jinan, China, 20–22 October 2017; pp. 4441–4446. [Google Scholar]
- Cho, B.; Yoon, J.; Kho, S.; Lee, J.; Kwon, S.; An, H.; Lee, S.; Kim, C. Seat posture stabilizing function for an electric wheelchair based on controlled pendulum mechanism. In Proceedings of the 4th International Conference on Control, Decision and Information Technologies (CoDIT 2017), Barcelona, Spain, 5–7 April 2017; pp. 365–370. [Google Scholar]
- Ahmad, M.; Rong, H.; Alhady, S.; Rahiman, W.; Othman, W. Colour tracking technique by using pixy CMUcam5 for wheelchair luggage follower. In Proceedings of the 7th IEEE International Conference on Control System, Computing and Engineering (ICCSCE 2017), Penang, Malaysia, 24–26 November 2017; pp. 186–191. [Google Scholar]
- Park, J.; Im, W.; Kim, D.; Kim, J. Safe driving algorithm of the electric wheelchair with model following control. In Proceedings of the 16th European Conference on Power Electronics and Applications (EPE-ECCE 2014), Lappeenranta, Finland, 26–28 August 2014; pp. 1–10. [Google Scholar]
- Ghorbel, A.; Ben Amor, N.; Jallouli, M. A survey on different human-machine interactions used for a survey on different human-machine interactions used for controlling an electric wheelchair. Procedia Comput. Sci. 2019, 159, 398–407. [Google Scholar] [CrossRef]
- Wahyufitriyani, C.; Susmartini, S.; Priadythama, I. Review of intelligent wheelchair technology control development in the last 12 years. In Proceedings of the 2nd International Conference of Industrial, Mechanical, Electrical and Chemical Engineering (ICIMECE 2016), Yogyakarta, Indonesia, 6–7 October 2016; pp. 201–206. [Google Scholar]


{kind=link}
| Method | References |
|---|---|
| Brain-computer interface (BCI) | [6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24,25,26] |
| Artificial vision | [6,11,14,27,28,29,30,31,32,33,34,35,36] |
| Voice commands | [37,38,39,40,41,42,43,44,45,46] |
| Touch | [47,48,49,50,51] |
| Hand movement | [52,53,54,55,56] |
| Head movement | [27,28,37,57,58,59,60,61,62,63,64,65] |
| EOG | [29,30,31,66,67] |
| sEMG | [68,69,70,71,72,73] |
| Avoid obstacles | [32,33,74,75,76,77] |
| Laser | [25,33,63,78,79,80,81] |
| Manual control/joystick | [21,47,49,62,79,82,83,84,85,86] |
| Control Strategy | References |
|---|---|
| Algorithm to avoid obstacles | [6,10,11,14,16,18,20,23,32,33,36,38,40,42,43,44,50,58,59,60,64,67,71,74,75,76,77,81,87,88] |
| Adaptive control | [6,18,52,53,82] |
| Motor Imagery and P300 potential | [7,8,10,15] |
| Emotion Fractal Analysis Method (EFAM) | [9] |
| Neural networks | [11,25,27,30,59,61,72,84] |
| Linear Discriminant Analysis (LDA) | [12] |
| Support Vector Machine (SVM) | [13] |
| Position control | [14,31,34,36,47,48,49,66,68,73,79] |
| Steady State Visually Evoked Potential (SSVEP) | [16,17,25] |
| Multi-Modal Control | [19] |
| eSenseTM algorithm | [21] |
| Classification method using spatial-frequency feature of steady- state somatosensory evoked potentials (SSSEPs) | [22] |
| Adaptive neuro-fuzzy inference system (ANFIS) | [23] |
| Adaboost Algorithm/Image Processing | [23,27,29,33,34,35,44,50,78,89] |
| Bayes method | [52] |
| Orientation control/Thresholding | [21,25,37,53,54,56,59,60,62,64,68] |
| PID/PI/PD Controller | [54,55,67,80,90,91,92] |
| Hilbert Algorithm | [56] |
| Velocity control | [32,34,69,70,71,74,82,83] |
| Voice control | [38,39,40,41,42,43,46,88] |
| Fuzzy logic control | [45,64,76,86,90,93] |
| Kalman Filter | [64,77] |
| Navigation control | [94] |
| Speeded-Up Robust Features (SURF) algorithm | [94,95] |
| Tracking control | [6,85,96] |
| Instrumentation Non-Invasively Placed on the User | |
| Sub-category | Participants |
| Brain-Computer Interface (BCI) | 150 |
| Systems which implement micro- electromechanical sensors (MEMS) | 13 |
| Surface Electromyography (sEMG) and Electro-oculography (EOG) | 16 |
| Other types of instrumentation | 25 |
| Total | 204 |
| Instrumentation Incorporated in the Wheelchair | |
| Sub-category | Participants |
| Obstacle detection | 5 |
| Artificial vision | 3 |
| Wheelchair navigation | 42 |
| Total | 50 |
| Instrumentation | Control Strategy | References |
|---|---|---|
| EEG headset, camera. | Finite state machine, wall tracking algorithm and obstacle avoidance. Adaptive control. | [6] |
| EEG headset (patterns) | Pattern extraction and signal classification. | [7] |
| EEG headset, Arduino, module Bluetooth HC-05. | Signal treatment through spectrum analysis. | [8] |
| EEG headset, computer. | Emotion Fractal Analysis Method (EFAM). | [9] |
| Smartphone, EEG headset, IR camera, and microcontroller. | The processing of EEG signals is carried out in a mobile phone and the IR camera detects obstacles. | [10] |
| EEG headset, Arduino, Raspberry Pi, camera, ultrasonic and LiDAR sensors, GPS module. | Signal processing and classification through convolusional neuronal networks (CNN). | [11] |
| EEG headset, computer, network module, motor control module. | Signal processing of through visual stimuli using linear discriminant analysis (LDA). | [12] |
| EEG headset, driver and motors. | Processing through Wavelet and Support Vector Machine (SVM) as classification method. | [13] |
| EEG headset, Bluetooth module, camera, computer, and wheelchair prototype. | Position control. | [14] |
| EEG headset, GPS module, computer, DC driver and motors. | Control through the processing of EEG signals and automated guided mode in LabVIEWTM. | [15] |
| EEG headset, laser and ultrasonic sensors, computer. | Steady State Visual Evoked Potential (SSVEP). | [16] |
| EEG headset, ultrasonic sensors, IMU, Arduino, LabVIEWTM. | Signal processing through SSVEP and gyroscope. | [17] |
| EEG headset, IMU, computer, wheelchair. | Controller elaborated with three operating modes, through EEG, IMU, and cognitive mode. | [18] |
| EEG headset, computer, HMI. | Adaptive algorithm with temporal oscillatory response. | [19] |
| EEG headset, sensors photoelectric sensors, Bluetooth module, computer. | Multi-modal control with extraction and pattern recognition. | [20] |
| EEG headset, computer, joystick. | Brain signals manipulate the joystick through eSenseTM algorithm. | [21] |
| EEG headset, microcontroller, computer, driver, and motors. | Classification method using spatial-frequency feature of steady- state somatosensory evoked potentials (SSSEPs). Filter and use of Fast Fourier Transform (FFT). | [22] |
| EEG headset, EMG, Raspicam, Raspberry, Arduino. | Use of adaptive neuro-fuzzy inference system (ANFIS) method and Adaboost algorithm. | [23] |
| EEG headset, computer, wheelchair. | Thought signals are processed and make the wheelchair work. | [24] |
| EEG headset, sEMG and EOG signals, virtual platform. | HMI permits wheelchair use simulatation using augmented reality (AR). | [25] |
| Ultrasonic sensors, computer. | Lyapunov method and adaptive control. | [26] |
| Instrumentation | Control Systems | References |
|---|---|---|
| 3-axis MEMS sensors, computer. | Bayes method and, linear and rotational control | [52] |
| Orientation and ultrasonic sensors, microcontroller. | Angle thresholding is carried out through Euler angles. PID control. | [53] |
| ADXL330, Rx and Tx system, computer. | Data reception and transmission system. It receives signals from the head and hands. | [54] |
| ADXL345, Arduino, XBee Series, Battery. | PID control to stabilize the system and maintain the range of angular values. | [55] |
| Piezoresistive sensores, 3D-MEMS sensors, WiFi module, computer, data acquisition card (DAQ). | The controller receives ECG signals from piezoresistive sensors, processed in LabVIEWTM through the Hilbert algorithm. | [56] |
| Tilt sensor module, microprocessor, wheelchair. | The controller receives signals and a multiplexor selects them to operate the motors. | [57] |
| Capacitive sensors, computer. | Wavelet estimator and convolutional neural networks (CNN). | [58] |
| MEMS 3D sensors, ultrasonic, Bluetooth module, driver and motors. | Data thresholding. | [59] |
| MPU6050, solar panel, Arduino, ultrasonic sensors. | Data thresholding. | [60] |
| IMU, Arduino, computer. | Euclidean and Mahalanobis distance classifier. Artificial neural networks. | [61] |
| Infrared and inertial sensors, joystick, microcontroller, WiFi module. | Data thresholding. | [62] |
| Orientation sensors, voice recognition module, microcontroller, and LCD. | Orientation control and voice. | [37] |
| Stereo camera, GUI, computer. | Finite state machine. | [27] |
| Camera, motion sensors, computer, wheelchair. | Orientation control | [28] |
| Laser sensor, Kinect, and sEMG signals, computer and wheelchair. | PID control and processing of sEMG signals. | [63] |
| Instrumentation | Control Systems | References |
|---|---|---|
| Infrared and ultrasonic sensors, microcontroller. | Infrared sensors are placed on a pair of glasses the patient is wearing and if they open or close their eyes, in a certain order, this executes an action in the wheelchair. | [66] |
| EOG electrodes, RF transmitter and receiver, Encoder, Decoder, ultrasonic sensors. | PID control and EOG signal processing. | [67] |
| Video camera, computer. | Wavelet transform and, Adaboost and Haar algorithm. Control through neural networks. | [29] |
| Video camera, controller. | Image processing using Hough transformation. | [30] |
| Camera, Raspberry Pi, computer, arduino. | Image processing on a bidimensional plane. | [31] |
| sEMG signals, controller, wheelchair. | Processing and thresholding signals. | [68] |
| EMG signals, encoder, wheelchair. | The signals are processed through the square root and normalisation. Angular and linear velocity control. | [69] |
| sEMG signals, computer, wheelchair. | Signal normalisation and, angular and linear velocity control. | [70] |
| Kinect sensor and sEMG signals, wheelchair. | sEMG signals control the wheelchair using hand movements and the Kinect sensor is a security system. | [71] |
| IMU, computer. | Neural networks to control the wheelchair and use of IMU. | [72] |
| sEMG signals, computer, virtual wheelchair. | Spectrum addition to process sEMG signals and a peak detector. | [73] |
| Instrumentation | Control Systems | References |
|---|---|---|
| Wheelchair, motors, ascending-descending stairs system. | Modular Fuzzy control using PD-fuzzy logic controller. | [90] |
| EOG and EEG signals, computer, wheelchair. | Voice recognition and BCI through signal and visual image processing. Simultaneous localization and mapping (monocular SLAM) algorithm. | [38] |
| EEG headset, Arduino, Bluetooth module, voice module. | The interface permits the selection of the operation mode of the chair and the signals are processed in the program. | [39] |
| Microphone, microcontroller, driver, motors. | Voice command control. | [40] |
| voice module, conditioning, and motors. | Voice control and key control | [41] |
| Joystick, PLC, smartphone, router, wheelchair. | The system receives signals from a screen or joystick, and they are processed and received by the PLC, taking into account changes in direction and rotation | [47] |
| GSM module, ultrasonic sensors, WiFi module, touch screen, prototype. | Position control which avoids obstacles. | [48] |
| Voice module, ultrasonic sensors, Arduino. | Voice command control to direct the chair. Security control. | [42] |
| Voice module, GPS module, IR sensors, prototype. | Voice command control in the speaker dependent mode. | [43] |
| Joystick, computer, wheelchair. | Neural networks and an interface to process information. | [49] |
| Joystick, encoder, microcontroller, wheelchair. | Adaptive velocity control. | [82] |
| Joystick, driver, motors, prototype. | Velocity control. | [83] |
| Computer, actuators, wheelchair. | Position and velocity control. | [97] |
| Instrumentation | Control Systems | References |
|---|---|---|
| Ultrasonic sensors, computer, wheelchair. | Control to avoid obstacles through odometry. Speed control. | [74] |
| Camera, GPS module, computer, wheelchair. | Rotational velocity control and use of nodes and databases to operate the wheelchair. | [32] |
| Laser sensor, GPS module, accelerometer, Arduino. | Barrier detector system analysing the rotation of the wheels. | [75] |
| Ultrasonic sensors, encoder, computer. | Fuzzy logic control to avoid obstacles. | [76] |
| Laser camera, computer. | Conic coefficients for the processing of images and determining of distance | [33] |
| Ultrasonic sensors, encoder. | Extended Kalman filter for sensor signal treatment. | [77] |
| Instrumentation | Control Systems | References |
|---|---|---|
| Video camera, FPGA. | SURF detector. Computer vision algorithms. | [94] |
| FPGA, wheelchair. | Navigation control. | [87] |
| Voice module, IR sensors, LabVIEWTM, FPGA. | Voice control commands to activate the chair and detect obstacles through IR sensors. | [44] |
| Kinect, computer, wheelchair. | Triangulation method, proximity, motion recognition, gesture recognition and scene analysis. Position control. | [88] |
| PixyCMUcam5, ultrasonic sensors, microcontroller, transaxle motor. | Colour tracking technique. Image processing and obstacle detection system. | [98] |
| Pan-Tilt-Zoom (PTZ) c, gyroscope, encoder, laser, wheelchair. | Extended Kalman Filter, SURF algorithm. Fuzzy logic control and obstacle avoidance. | [95] |
| Webcam, ultrasonic sensors, DSP processor, computer. | Adaboost algorithm. Thresholding control. | [64] |
| Touch screen, DAQ, encoder, wheelchair. | PID control for rotational velocity and position. | [50] |
| Camera, computer, wheelchair. | Simultaneous Localization and Mapping (SLAM). Object segmentation and detection. | [34] |
| Stereo camera, computer, wheelchair. | Image processing to follow the legs of a companion. | [78] |
| Instrumentation | Control Systems | References |
|---|---|---|
| Joystick, laser sensor, wheelchair. | Line control tracking. | [84] |
| Computer, wheelchair. | Map estimation of the companion’s position | [85] |
| GSM module, WiFi module, IR sensors, Arduino, wheelchair. | Control through touch and security screen. | [89] |
| Computer, wheelchair. | PI motion control. | [86] |
| Computer, wheelchair. | Tracking control and wheelchair rotation. | [99] |
| Trackball sensor, ultrasonic sensors, computer, wheelchair. | PID motion control. | [93] |
| Voice modules, ultrasonic sensors, microcontroller, LCD, prototype. | Voice control through commands. | [51] |
| Laser sensors, computer, LabVIEWTM. | Locomotion and posture control. PI and PD control. | [91] |
| Camera, ultrasonic sensors, computer, wheelchair, bed. | Position control and obstacle avoidance. | [96] |
| Joystick, computer, wheelchair | Neural networks and LabVIEWTM. | [92] |
| Camera, computer, wheelchair. | HAAR Cascade Algorithm, image processing and path planning. | [35] |
| Joystick, computer, wheelchair. | Vector Field Histogram (VHF) algorithm, fuzzy logic control in LabVIEWTM. | [45] |
| Computer, wheelchair. | Predictive tracking model and transverse feedback linearization. | [46] |
| LED matrix, cameras. | Image processing and classification. | [79] |
| Computer, wheelchair. | Fuzzy logic control. | [80] |
| Laser sensors and joystick, computer, wheelchair. | Position control. | [81] |
| Laser sensors, computer, wheelchair. | Virtual environment elaborated in MATLAB® to execute actions in case of obstacles. | [36] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Callejas-Cuervo, M.; González-Cely, A.X.; Bastos-Filho, T. Control Systems and Electronic Instrumentation Applied to Autonomy in Wheelchair Mobility: The State of the Art. Sensors 2020, 20, 6326. https://doi.org/10.3390/s20216326
Callejas-Cuervo M, González-Cely AX, Bastos-Filho T. Control Systems and Electronic Instrumentation Applied to Autonomy in Wheelchair Mobility: The State of the Art. Sensors. 2020; 20(21):6326. https://doi.org/10.3390/s20216326
Chicago/Turabian StyleCallejas-Cuervo, Mauro, Aura Ximena González-Cely, and Teodiano Bastos-Filho. 2020. "Control Systems and Electronic Instrumentation Applied to Autonomy in Wheelchair Mobility: The State of the Art" Sensors 20, no. 21: 6326. https://doi.org/10.3390/s20216326